
Abstract
The study of nonlinear chaotic systems and their control is an important topic. In this paper, a hybrid control strategy based on cuckoo search algorithm and extreme learning machine is proposed. Cuckoo search algorithm is used in a hybrid control strategy in order to optimise the weights and biases in extreme learning machine leading to the improvement of its performance. Simulations indicate that the proposed method is able to fit nonlinear chaotic systems and control chaotic systems effectively. Data used in the nonlinear chaotic system are also tested for uncertainty and unknown systems. Simulation results confirm that the proposed method shows robustness for noisy data and perturbed parameters.
Introduction
As a special nonlinear phenomenon, chaos has received much more attentions since first proposed by Lorenz in 1963. 1 For unpredictability and sensibility to initial condition, chaos has been excessively applied in various areas with satisfactory results, such as image encryption.2–4 However, in many electric systems and industries, chaos is severely unexpected for its complex characteristics. Hence, it is vital to design the control strategy in nonlinear system. Many methods have been researched and applied by domestic and abroad scholars in past decades, including adaptive control (AC), output feedback control (OFC), and sliding mode control (SMF) etc. Li 5 designed an adaptive track controller to control chaos in fractional-order chaotic systems. Simulation revealed that the strategy has same performance in chaotic system with uncertain parameters and external perturbation. The idea of OFC is that by regarding output data as feedback variables, controller can be added into chaos system at any time. 6 Unfortunately, the equilibrium points of chaotic system can be confirmed only if its mathematical model is known. 6 Shen and Li 7 introduced the discrete rippling sliding mode control (DSMC) to stabilize the continuous unified chaotic system by discretization of continuous chaotic systems. However, the premise matrices A and B have been known, that is, parameters of system should be known as prior information. Although the above methods have resolved the issue of controlling or restraining chaotic systems, the precondition is that the mathematical model of chaotic system has been known evidently. However, it is difficult or even impossible to achieve the accurate models for most of the chaos in actual systems or industries. For uncertain chaotic systems, neural network (NN) based on radial basis function (RBF) is an effective approach that can restrain chaos.8,9 Even so, the drawback of slow convergence and premature convergence in NN may limit the whole performance.
In this paper, a hybrid method based on cuckoo search algorithm (CSA) and extreme learning machine (ELM) is explained in detail. The structure of the paper is as follows. The next section provides a brief overview of the existing methods. The subsequent section describes the proposed control strategy. Then contains the results of some numerical simulations to cover different chaotic systems, referencing signals, noise disturbances and perturbed parameters. Finally, the paper is concluded with conclusions.
The proposed control strategy based on CSA and ELM
Problem formulation
As a special nonlinear phenomenon, chaos with sensibility and unpredictability appears when simple conditions are satisfied, which would cause damage for systems. For an uncertain nonlinear single input and single output chaotic system, it can be described as follows

According to the above equation, outputs of nonlinear chaotic system are offset and target signals are traced indirectly if proper controller exists. As shown in Figure 1, a modified system with controller is described as follows



The modified nonlinear system.
Assuming that the mathematical model of chaotic system is not known explicitly, so the target chaotic system is uncertain, its data are obtained easily and ELM can fit with the excellent fitting performance which can be depicted as

The residual can be expressed as

Since

If fitting function can match nonlinear system with high accuracy, equation (6) can be replaced by

According to the system stability theory, with the constraint of
Basic theories in related algorithms
As reviewed in section ‘Problem formulation’, the modified nonlinear system with controller can work for restrained chaos effectively only if the fitting function matches the nonlinear system with high accuracy.
ELM, as classifier and predictor, is a very useful and efficient tool. Proposed by Huang et al. in 2005,
10
it has received growing attention with various application in many industrial processes, such as image processing,11,12 data prediction,
13
fault classification,
14
etc. ELM is single-hidden layer feedforward network, which can be expressed as follows



In the above formulas,
In the hybrid control strategy, ELM will be adopted to fit uncertain nonlinear chaos systems. However, the method of choosing its weight coefficient and bias randomly in traditional mode would limit its performance. Motivating by optimization algorithm, the challenge can be overcome by using intelligent algorithm. In this paper, ELM is optimized by known swarm intelligent algorithm, specifically the algorithm called CSA.
Emulating the cuckoo breeding behavior, cuckoo search algorithm (CSA) is the novel optimization algorithm established by Yang.
15
Owing to its excellent ability in optimization, it has been successfully applied for a wide variety of optimization problems,
16
such as facility layout design
17
and aircraft control.
18
The fundamental equations in CSA are



When

Hybrid control strategy based on CSA and ELM
According to the above interpretation, the hybrid control strategy based on CSA and ELM is shown in Figure 2. As the figure revealed, the related parameters are:

The structure of hybrid algorithm based on CSA-ELM.
Assuming the mathematical model of nonlinear chaotic system is unknown means its mathematical model is uncertain. In order to obtain fitting function of nonlinear uncertain chaotic system, vast amount of data is used in advance to train and test ELM. When the fitting function matches the actual system with high accuracy, outputs of system are offset, and the target signal is traced. As the schematic flowchart illustrated, the performance is determined by fitting accuracy. In our proposed strategy, CSA is employed into the hybrid strategy to improve the performance of ELM by optimizing the weights and biases in ELM, although ELM itself has satisfying fitting performance for nonlinear system.
The proposed hybrid control strategy can be summarized as follows
Step 1: Initialize reference signal Step 2: Obtain training data Step 3: Initialize the number of hidden neurons between the input layer and hidden layer, and establish the framework for ELM. Step 4: Initialize the number of nests Step 5: Determine the potential optimal parameter and generate the initial locations of nests. Step 6: Calculate the fitness value and update the global best location in nests. Step 7: Update locations of all nests, obtain fitness value and replace the worst nest. Step 8: Judge host bird has found cuckoo’s egg or not. If so, replace this nest with new one. Step 9: If Step 10: Output Step 11: Test chaotic system with controller.
The simulation and discussion
In order to test the performance of our proposed control strategy, cubic chaotic system with four various target signals is demonstrated as test nonlinear system. Then, the four various chaotic systems with same target signals are tested to verify the universality of proposed control strategy. Finally, the logistic chaotic system with noise disturbance and parameter disturbance is also tested to verify the robustness of control strategy.
Different reference signals
Cubic chaotic map can be defined as follows

Correspondingly, the fitting function with CSA-ELM is

The controller can be designed as

Finally, the modified nonlinear system can be established as

In the modified nonlinear system,
All the test data of ELM with various target signals and outputs of system are shown clearly in Figure 3. As the results showed, the test data match with the predicted data by the optimal ELM, and the outputs of modified nonlinear system are same to define various target signals. Apparently, the chaotic phenomenon is controlled and different target signals are also traced effectively which verify that the proposed control strategy is suitable for various target signals.
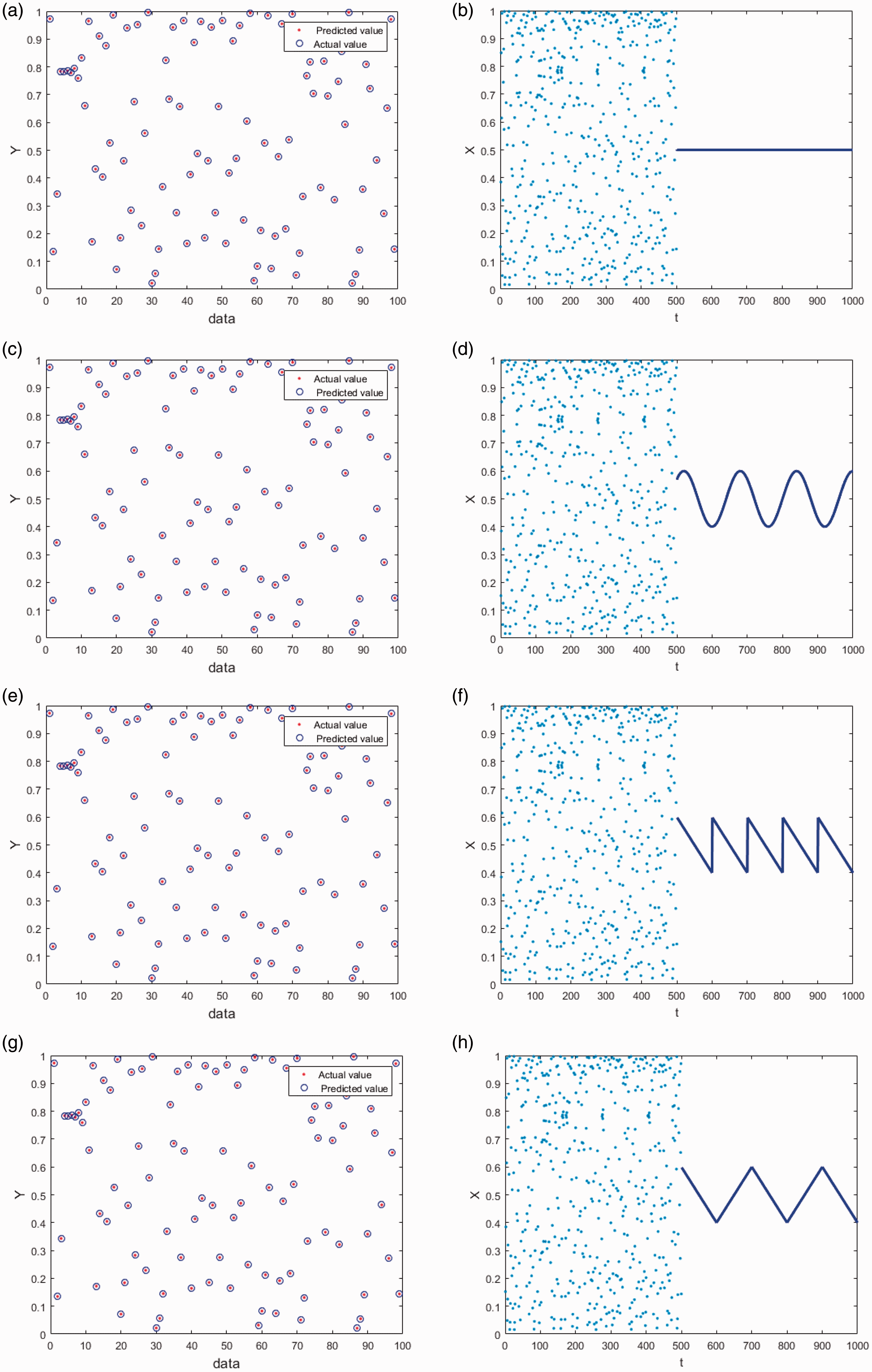
The test data of ELM and outputs of system with different target signals. (a) The test data of ELM with target signal 1. (b) The outputs of system with target signal 1. (c) The test data of ELM with target signal 2. (d) The outputs of system with target signal 2. (e) The test data of ELM with target signal 3. (f) The outputs of system with target signal 3. (g) The test data of ELM with target signal 4. (h) The outputs of system with target signal 4.
Different chaotic systems
In order to verify commonality of our proposed control strategy, another four various chaotic maps, Logistic map, Chebyshev map, Tent map and Sinusodial map, are tested with two typical target signals, sawtooth wave and triangular wave.
Logistic map
Introduced by Robert May in 1976, the logistic map would lead to chaotic dynamics. Logistic map generates chaotic sequences in (0,1).
19
It can be defined as follows
2. Chebyshev map

Chebyshev chaotic is a classical chaotic map applied in machine learning and image recognition. It can generate chaotic phenomenon in (−1,1). The definition of Chebyshev map can be described as follows
3. Tent map

Similarly, tent map can generate chaotic phenomenon in (0,1). Its formula is
4. Sinusodial map

Sinusodial chaotic map is also a classical chaotic map. Its formula is

The typical behaviors of four chaotic maps are shown in Figure 4. In Logistic map, the initial value is 0.2 and

Chaos of four maps with 500 iterations. (a) Logistic map. (b) Chebyshev map. (c) Tent map. (d) Sinusodial map.
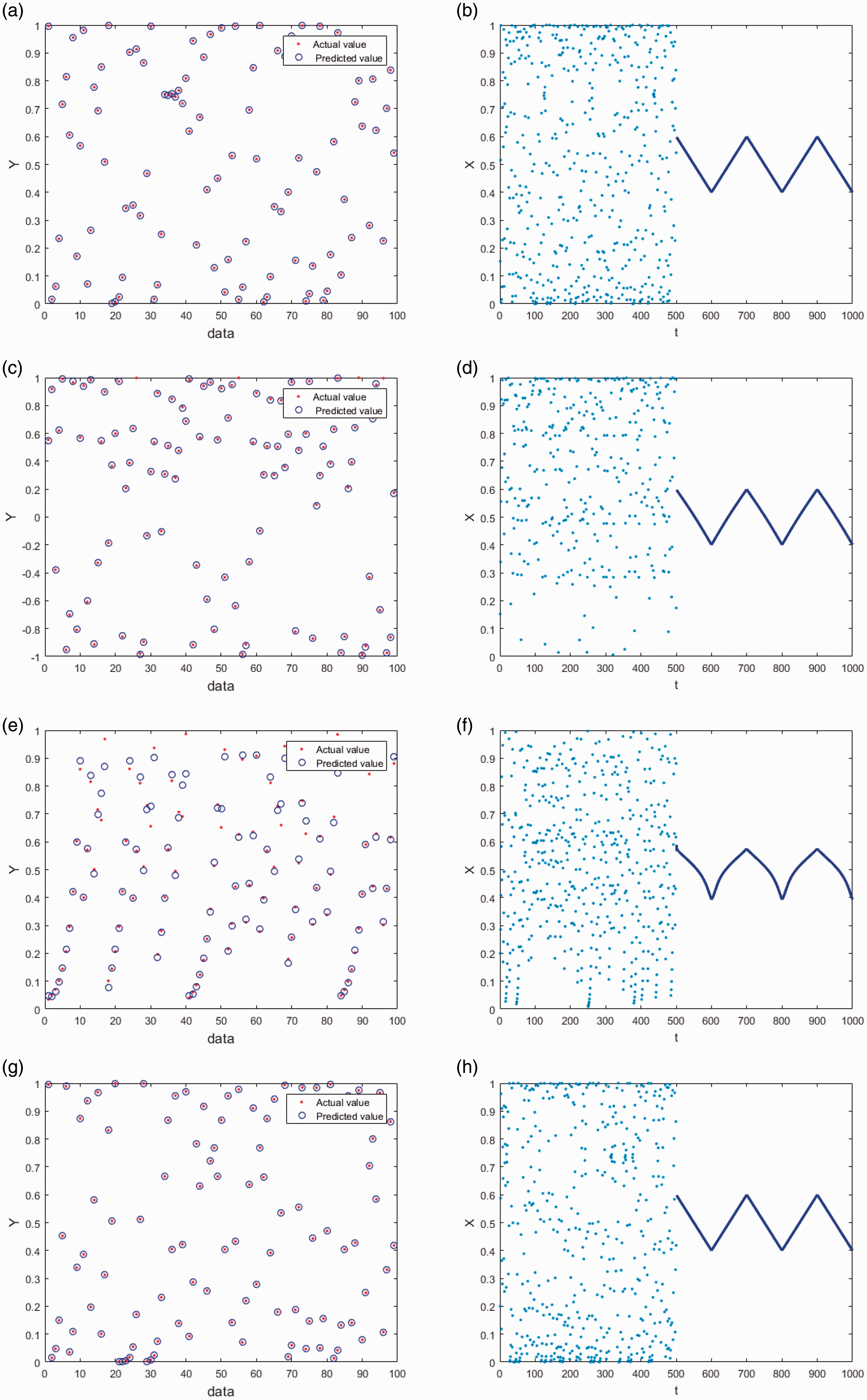
Fitness value curves and outputs of system for four chaotic maps. (a) The test data of ELM with chaotic map 1. (b) The outputs of system with chaotic map 1. (c) The test data of ELM with chaotic map 2. (d) The outputs of system with chaotic map 2. (e) The test data of ELM with chaotic map 3. (f) The outputs of system with chaotic map 3. (g) The test data of ELM with chaotic map 4 (h) The outputs of system with chaotic map 4.
Parameter perturbation
In actual industry and nonlinear system, parameter perturbation may happen in complex conditions, which increases the barriers to effectively control chaos in system. In order to verify the robustness of our proposed control strategy, Sinusodial map is regarded as tested chaotic system with sawtooth wave and triangular wave in this sub-section.
According to equation (13), assuming the nonlinear system as

Similarly, the fitting function with CSA-ELM is given as

The controller can be written as

Finally, the modified nonlinear system is given as

Assuming the parameter of nonlinear system will be changed within certain range means the parameter perturbation

The test data of ELM and outputs of system with parameter perturbation. (a) The test data of ELM with target signal 3. (b) The outputs of system with target signal 3. (c) The test data of ELM with target signal 4. (d) The outputs of system with target signal 4.
Noise disturbance
Although unable to avoid, it is challenging to reduce the effect of noise and disturbance. Various control approaches have been proposed by researchers to resolve denoising problem, such as wavelet transform(WT). In this sub-section, noise disturbance is added into nonlinear system to verify the proposed modified control scheme.
Similarly, assuming the nonlinear system is Sinusodial chaotic map, that is

Then the fitting function by CSA-ELM is given as

So the controller is

Finally, the modified nonlinear system is

Assuming the data sampled from nonlinear system have been mixed by random noise, which amplitude is 0.01, then CSA-ELM is trained with the same other parameters mentioned in sub-section ‘Different chaotic systems’. The target signal includes sawtooth wave and triangular wave. The reference accuracy

Fitness value curves and outputs of system with noise disturbance. (a) The test data of ELM with target signal 3. (b) The outputs of system with target signal 3. (c) The test data of ELM with target signal 4. (d) The outputs of system with target signal 4.
Comparison with the state-of-the-art algorithms
In this paper, since CSA has the advantages of simple structure, high computational efficiency and strong reliability, it is natural to apply CSA to optimize ELM. However, after a lot of experiments, it is found that if the classical algorithm POS, FA, etc. are used to optimize the ELM, then almost the same control results will be obtained. Result shown in Figure 8 leads to the advantage that our proposed method is versatile.
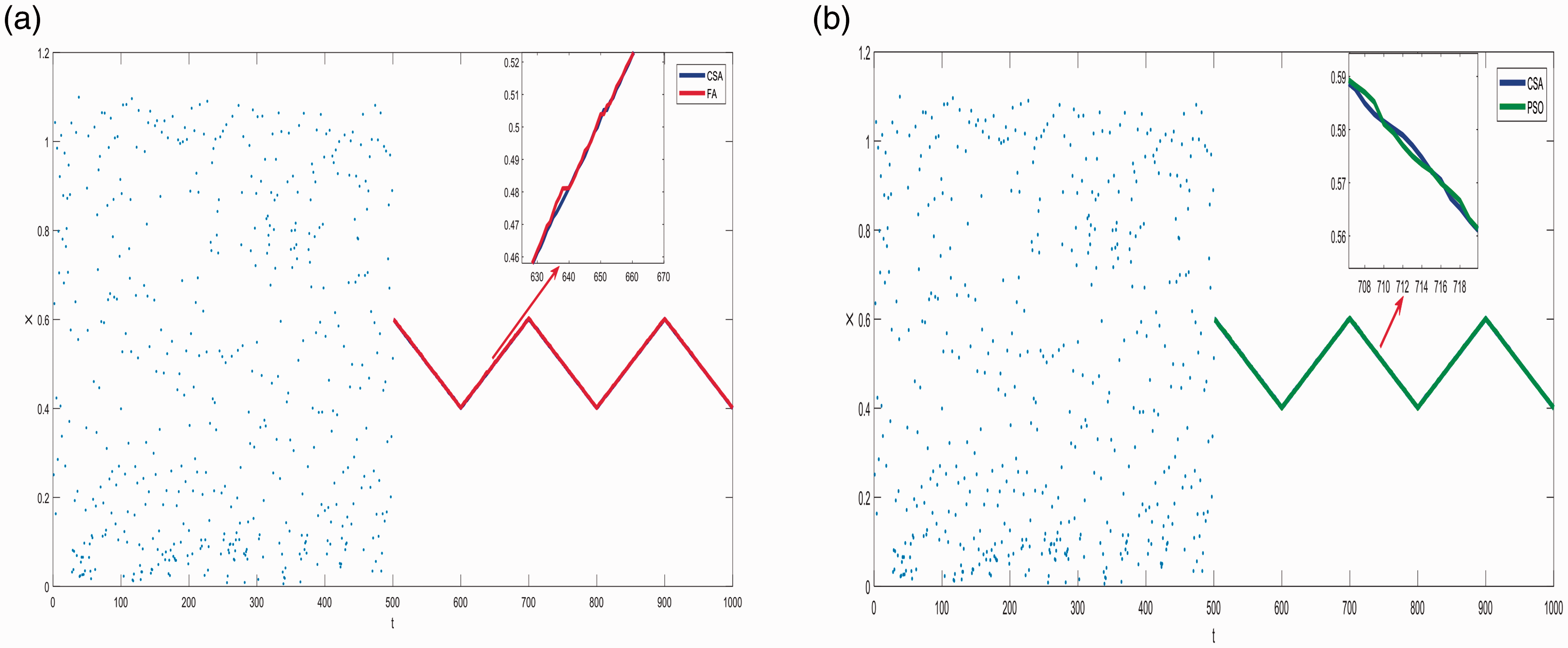
Compare results. (a) CSA and FA optimized ELM comparison. (b) CSA and POS optimized ELM comparison.
Conclusion
Chaos control is a significant issue for integrated circuit system which ensures efficient work for important places, such as satellite communication, industrial power and aeronautics. Taking chaotic system into consideration, especially nonlinear uncertain chaotic system, in this paper, a hybrid control strategy based on CSA and ELM has been proposed. A modified controller is added into the nonlinear system and if fitting function matches the nonlinear system, outputs of system are offset, then the target signal is traced with high accuracy. In the test section, different chaotic systems, different target signals, parameter perturbation and noise disturbance in nonlinear chaotic system have been tested to verify the performance of our control strategy. Simulation results indicate that the nonlinear chaotic system is matched satisfactorily by the optimal CSA-ELM and the target signals are traced well. In conclusion, the proposed method has commonality which can be suitable for various and uncertain chaotic system, and also has robustness which can resist parameter perturbation and noise disturbance in a way.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported with funding from China Postdoctoral Science Foundation