In this article, the coordination control problem of group tracking consensus is considered for networked nonholonomic mobile multirobot systems (NNMMRSs). This problem framework generalizes the findings of complete consensus in NNMMRSs and group consensus in networked Lagrangian systems (NLSs), enjoying capacious application backgrounds. By leveraging a kinematic controller embedded in the adaptive torque control protocols, a new convergence criterion of group consensus is established. In contrast to the formulation under strict algebraic assumptions, it is found that group tracking consensus for NNMMRSs can be realized under a simple geometrical condition. The system stability analysis is dictated by the property of network topology with acyclic partition. Finally, the theoretical achievements are verified by illustrative numerical examples. The results show an interesting phenomenon that, for NNMMRSs, the state responses exhibit negative correlation with the algebraic connectivity and coupling strength.
An intensive area of research about mechanical control of nonholonomic robot system (NRS) has been investigated in the past decade.1–5 Since the necessary conditions of smooth feedback stabilization do not hold, it has been corroborated that controlling such system is a difficult problem.6 Besides, as the velocity constraints are not integrable, the position of the system cannot be obtained directly without the help of dynamic equation. Accordingly, NRS usually exhibits characteristics of underactuated system, that is, n degrees of freedom can only be controlled by m inputs, .7–9 Among others, two-wheeled mobile robot, as a classical type of NRS, has been paid a significant attention in the literature10–12 due to its wide variety of applications, including surveillance and monitoring missions. However, complex tasks cannot be completed by an individual robot, such as large-scale search and rescue missions, and assembly line production. To solve this problem, the research on the coordination control of networked nonholonomic mobile multirobot systems (NNMMRSs) has drawn a lot of attractions due to its powerful operation ability and broad potential applications.12–15 In general, the problems of consensus tracking and coordination control go hand in hand. Consensus appertains to the collective behaviors that agents achieve commonality in some way by designing protocols with local or global information and defined state upfront.16,17 To realize various collective behaviors/patterns in multiagent systems (MASs), including but not limited to flocking,18–20 rendezvous21 and formation,22–24 a lot of research has been done on finite-time consensus,25 consensus under communication limits including time delays,26,27 uncertain nonlinear systems,28 and asynchronization.29
It is noteworthy that the literature mentioned above concentrates on studying complete consensus, namely, all the agent behaviors evolve to the same state. Nevertheless, as the modern engineering systems tend toward large-scale, intelligentized and elaborate strategies, the tasks dealt with by multirobots are very complicated. Accordingly, to cope with any unpredicted circumstances and changes, the agent behaviors are likely to evolve multiple consistent states. For example, formation tracking control of MASs often has multiple targets that are relatively more complex than single operations.30 Complex tasks inevitably lead to the complexity of multiobjective, which requires the systems to make interactive decisions (group communication algorithm) to reach a certain degree of consensus. In this case, modularizing the robot system into subgroups and achieving group consensus turn out to be an efficient way to reduce computational complexity. Taken this way, the robots in each subgroup track a common reference trajectory and asymptotically agree with their teammates on their positions and velocities. Compared with complete consensus, the scenario of group consensus is more appropriate for agents to accomplish complex tasks. For instance, multitarget surveillance, complicated search, and rescue operations are extensively relying on the concept of group consensus.31,32 Although some work has been reported with the group consensus convergence criteria,33–35 the subjects of the study are restricted in the networks of first-order dynamics. Feng et al.36 generalized the first-order group consensus control scheme to the second-order case, but the result is based on a relatively strict algebraic condition. Liu et al.37 presented group/cluster consensus in NLSs with uncertain parameters by adopting a novel decomposition approach of Laplacian matrix, but the work did not account for the factors that impact on group consensus. It is of practical and theoretical interest in the aforementioned studies, concerning either NNMMRS complete consensus or holonomic MAS group consensus. However, it should be noted that the existing approaches cannot be applied to the group consensus problem of multiple nonholonomic systems in the context of dynamics.
Compared with the aforementioned work, the presentation in this article is for a promising framework to solve the group-based consensus problem of NNMMRSs. Resorting to a kinematic controller embedded in the adaptive torque control protocols, a new convergence criterion of group consensus is established. The key contributions from this study are summarized below: (i) Compared with the existing results,15,38–40 a more applicable scenario, the group tracking consensus problem of NNMMRSs, is proposed. This scenario can better adapt to the unforeseen changes brought by environments, situations, and tasks. (ii) The conclusions in this article extend the results of complete consensus in NNMMRSs and group consensus in NLSs, taking the existing results15,37 as special cases. (iii) This article shows that it is relatively easy to achieve group consensus under a simple geometrical condition. In contrast to the existing results,36 there is no need to make the predefined strict assumptions about algebraic eigenvalues. (iv) In comparison with complete consensus, the lower complexity of group consensus can be achieved by decreasing the intragroup interaction. The work in this research is conducive to the deployment and adaptation of networked robot architecture and distributed robotic applications.
The rest part is briefly arranged as follows: In “Preliminaries” section, requisite mathematical backgrounds and problem formulation are introduced in order. The “Presentation” section solves the coordination control problem of group tracking consensus for NNMMRSs, “Simulations” section demonstrates numerical examples to verify the effectiveness of Theorem 1, and “Conclusions” section outlines the future work.
Preliminaries
Graph theory
Throughout this article, the notation represents a weighted directed graph (diagraph), represents the node set, represents the edge set, and is the weighted adjacency matrix in which the entry is given by if , otherwise, if . A directed path in the diagraph is composed with a set of different edges from to , , satisfying A spanning tree in the diagraph is defined as a directed path from to any other nodes , . Define as the Laplacian matrix, where , and .
Dynamics of networked nonholonomic mobile multirobot systems
Considering NNMMRSs of d robots subject to nonholonomic constraints, the i’th system dynamics equation can be formulated as follows1,41
where are, respectively, the generalized coordinate vector and the generalized velocity vector. Denote as the inertial matrix, as the Coriolis and centrifugal force matrix, and as the generalized potential force, respectively. is the input transformation matrix, and represent the input torque vector. The constraint matrix and the constraint force vectors are denoted as and , respectively.
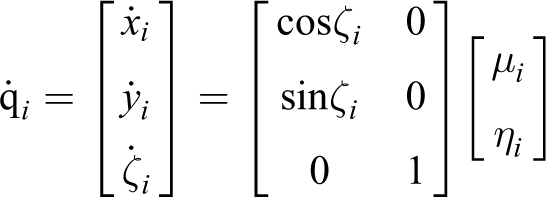
The kinematic equation of the i’th system is expressed as
Thus, system (1) can be transformed into two formulas
where in equation (2) is the velocity vector applying for all t, . In addition, the properties of system (1) are available for those of system (3) after transformation. Furthermore, there are three significant dynamics properties.43
Property 1., and are positive constants, satisfying that .
Property 2. is skew symmetric.
Property 3. System (3) is linearly parameterizable with , which represents the constant dynamics parameter vector
where are differentiable vectors and is regression matrix.
Acyclic network
Here, the diagraph is employed to depict the network topology of d NNMMRSs. For , assume that there is a partition , satisfying (i) , (ii) , and (iii) , and that the subgroup graph of is denoted as the network topology of . Each subgroup node set can be described as where , . Denote . Denote if and come from the same subgroup node set.
Next, an acyclic partition of is introduced as follows37,44
where describes the communication transmission in , and describes the communication transmission from subgroup to , . Additionally, three assumptions are required in the following discussion:
Assumption 1. possesses an acyclic partition.
Assumption 2. The sum of rows in is zero, .
Assumption 3. owns a directed spanning tree, .
Remark 1. In Assumption 1, the feature of the acyclic partition indicates that the former subgroup can transmit information to the latter subgroup, but the latter subgroup cannot transmit information back to the former subgroup. Based on this, the role of Assumption 2 is to eliminate the impact of the former group on the latter group, which has been widely employed in the existing literature.37,44,45
Problem formulation
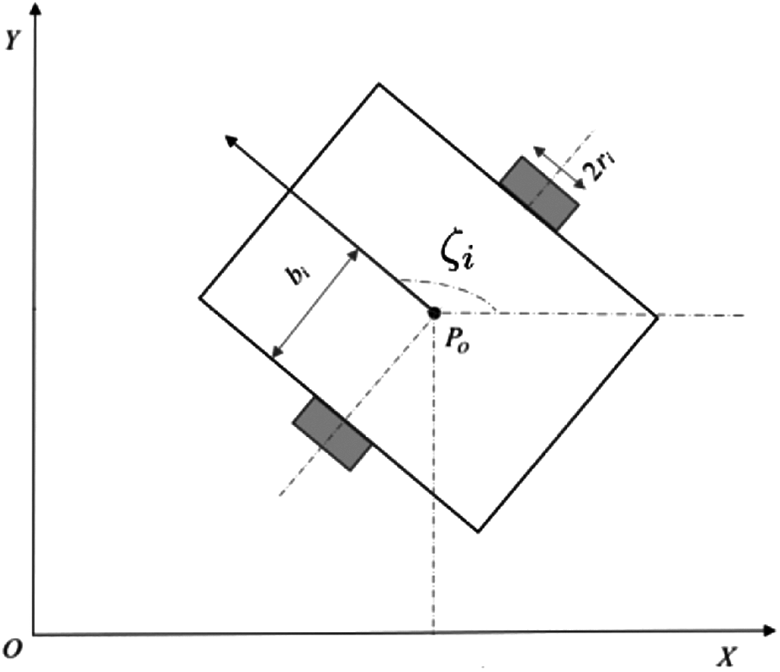
For NNMMRSs, the problem formulation of group tracking consensus is presented in this subsection. First, a sketch of the i’th two-wheeled nonholonomic robot is shown in Figure 1. Then, the configuration of the i’th robot can be described as follows
where represents the origin coordinate of the mobile robot body frame. is the steering angle of the mobile robot. and are, respectively, the angles of the right and the left actuated wheels.
Sketch of the i’th two-wheel actuated mobile robot.
Given that the wheels of each robot roll but not slip, the constraint matrix of in equation (1) is derived as41
where ri is the radius of the wheel and bi is the half-width. Select in equation (2) as
For convenient discussion, let . The expression of the generalized velocity form is expressed as
where the vector is denoted as the velocity of P0. Now, the concept of group consensus coordination control in NNMMRSs is defined below.
Definition 1. For NNMMRSs consisting of d robots, there is a partition of the node set , where is the subgroup of The reference trajectory is given as
where and . Denote . It refers to achieve group consensus tracking control in NNMMRSs if for robot i, , utilizing the control input , a smooth velocity control input vector, can be found, such that where ei is denoted as the position error with respect to and is denoted as the control gain vector. In addition, if , one has .
Presentation
Trajectory tracking is the core objective of basic navigation problems. Accordingly, the aim of this section is to design a unified group consensus tracking scheme for NNMMRSs. Assume that is the subgroup of , as shown in “Acyclic network” subsection, . First, the position error of the i’th robot is given below
where , . Next, take the derivative of equation (7)
Second, introduce an auxiliary velocity control input of robot
where are positive constants. Taking the derivative of equation (8), one has
It can be obtained from the literature15 that guarantees the position tracking of NNMMRSs in . Subsequently, for robot i, an auxiliary sliding reference velocity is introduced as
where , and are the designed positive constants. In addition, one has
Next, introduce the following sliding variable
then, the torque control protocol of the i’th robot is given by
where is the symmetric positive-definite matrix, and the adaptive law is the estimation of , which can be defined as
where is symmetric positive-definite.
Combining equation (12) with equation (3), rewrite equation (3) as
where . Then, the compact form of equation (11) is written as
the derivative of equation (15) can be expressed as follows
where , is a diagonal matrix about , , and , where
Given that Assumptions 1, 2, and 3 are satisfied, the k independent left eigenvectors, which are corresponding with the k simple zero eigenvalues of L, , are obtained.37 Next, construct matrix
Define coordinate transformation Then, can be expressed as where
and
where
Since the matrix is invertible, reformulate equation (11) as
Then, equation (20) is decomposed into two formulas
where is the diagonal matrix with respect to and
where is the diagonal matrix about The structure of SR is written as
Based on the above analysis, Theorem 1 is readily obtained below.
Theorem 1. Given that is an acyclic partition of and that Assumptions 1 and 2 hold, then coordination control of group tracking consensus for NNMMRSs (1) can be realized under the control protocol (12) and the adaptive law (13) if and only if Assumption 3 is satisfied.
Proof. (Sufficiency) The Lyapunov-like function is constructed as
The derivative is given by
Combining Property 3 and closed-loop system (14) yields that
It can be seen from Property 2 that is skew symmetric, therefore
Consequently, si belongs to L2 space and space simultaneously, and . Because the auxiliary velocity control input guarantees tracking steering stability of the i’th robot, there always exists a positive constant α, yielding that is Hurwitz stable. Accordingly, system (20) is input-state stable with respect to input and state . Since is bounded, is bounded, which implies that Xi is bounded according to equation (17), . Consequently, is bounded, which gives rise to the boundedness of . Accordingly, is bounded as . For the sake of equation (11), is bounded. Due to equation (10), is bounded. According to Properties 1 and 3, is bounded. Accordingly, is bounded because of equation (14). Thus, is bounded. Then, is uniformly continuous. In view of Barbalat’s Lemma, it is derived that , when , which results in as .
For another, based on the structure of SR in equation (22). Since is also Hurwitz stable, system (21) is input-state stable, that is, if , one has as From the structure of XR in equation (18), as Then, from the structure of in equation (19), , as . It follows that as , where . Since , , . Due to equation (15), one has when as . Consequently, as . For , it gives rise to Accordingly, . Therefore, the group tracking consensus problem of NNMMRSs is solved. Sufficiency is proven.
(Necessity) Consider reductio ad absurdum. There exists at least one robot that cannot receive information from any other robots. In this case, group consensus cannot be realized, so contradiction arises. Necessity therefore applies. Theorem 1 is proven.
Remark 2. Compared with complete consensus,15 the dominant difficulty of group consensus scenario is to design feasible control algorithm to eliminate impacts between subgroups. Theorem 1 effectively expands the scopes of research interest of NNMMRSs.15,38–40 By the decomposition matrix , it is clear to verify that the convergence of system (14) is equivalent to guaranteeing the stability of subsystems Xi and XR. Thus, the case in the literature15 represents a special circumstance by specifying in Theorem 1.
Remark 3. As NNMMRSs are intrinsically high-order nonlinear systems subject to underactuated characteristics, another difficult problem is that the component of the state usually has no corresponding input. By introducing a smooth kinematic reference vector encapsulated in , the designed algorithm guarantees the predefined transient state performance of NNMMRSs. When the constraint matrix is equal to zero in system (1), the problem turns into the scenario of NLSs. Thus, our work extends the related results of NLSs.37
Remark 4. Compared with the existing results,15,39 the network employed here satisfies one-way information transmission with a stable structure and multiple subgroups. Our problem framework better depicts the actual situation for complex tasks in engineering applications. Besides, stability analysis of Theorem 1 resorts to the propositions of network Laplacian matrix null space. Unlike the relatively strict algebraic assumptions,36 the realization of group consensus only relies on acyclic partition network topology.
Simulations
In view of the abovementioned discussion, it is necessary to verify the effectiveness and feasibility of our group consensus algorithm when the dynamics of multiple nonholonomic systems is considered. In addition, there has been no research regarding whether the existing convergence results of complete consensus are applicable to those of group consensus. These observations motivate us to carry out the following studies. In this section, three numerical simulation examples are illustrated under two network topologies.
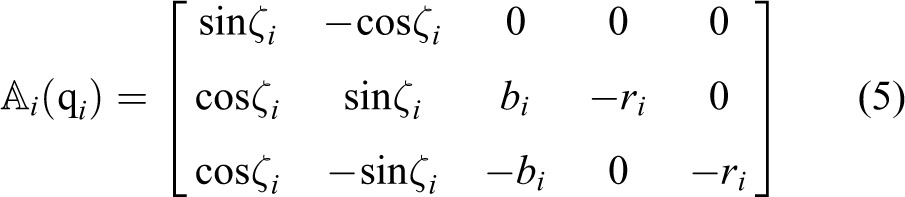
Specify and , respectively, as in equations (5) and (6) of “Preliminaries” section. and are, respectively, expressed as
and
The regressor matrix can be described below
Select the designed parameters below: . For the convenience of comparison in the following examples, the initial values of linear velocities and angular velocities are all selected as , .
Example 1. The objective of this example is to verify the effectiveness of our group consensus algorithm. In other words, when the agents in one subgroup have impact on the agents in other subgroups, the control protocols ensure that the agents track multiple independent trajectories. For a team of NNMMRSs with nine robots, two directed graphs and are shown in Figure 2. Because each subgroup in and possesses directed spanning tree, Theorem 1 applies. Next, two composite tracking trajectories are given under and , respectively.
Network topology graphs and of NNMMRSs with three subgroups.
For the first case, the tracking trajectories are provided under
Select , and the position initial values as
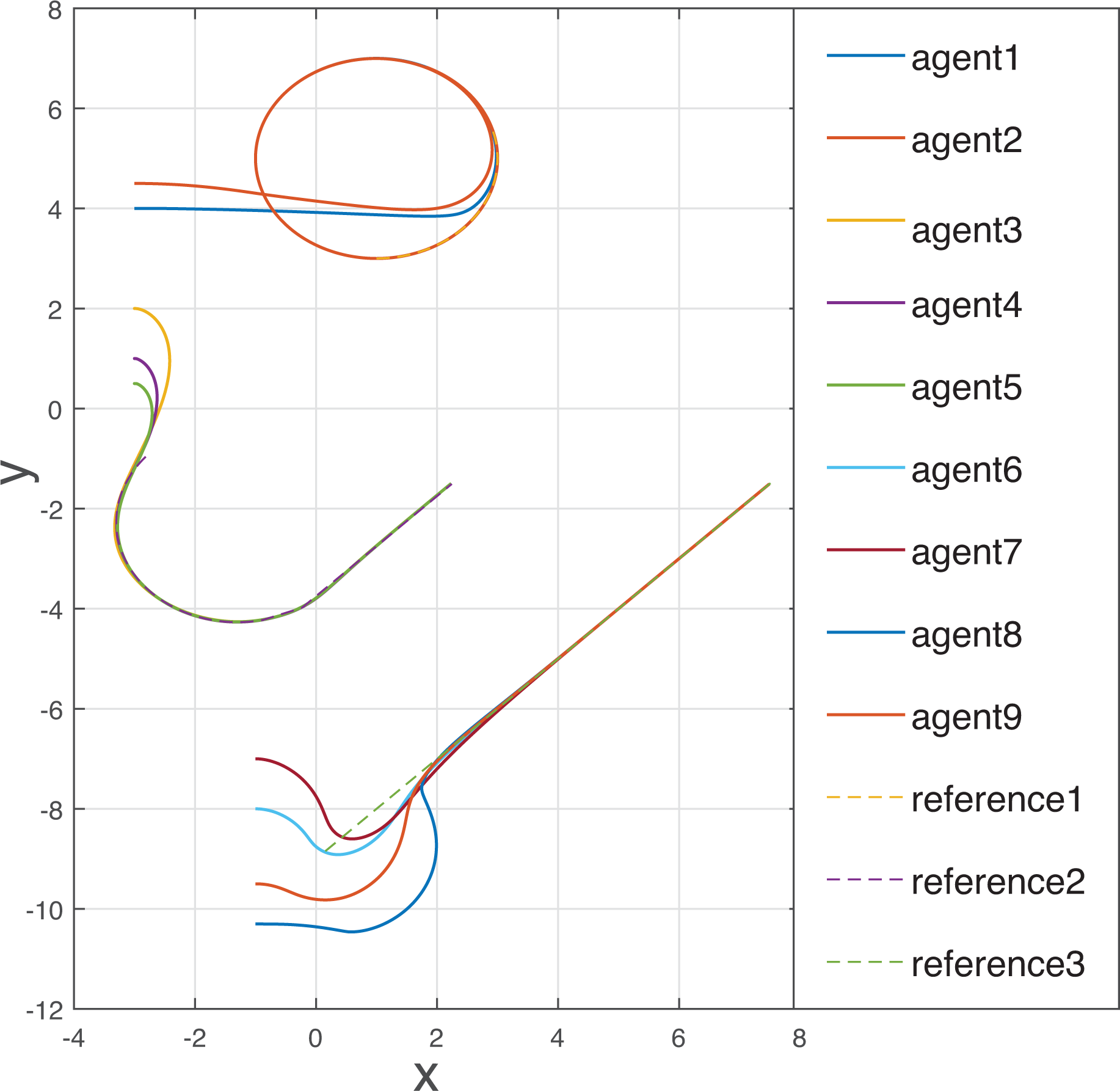
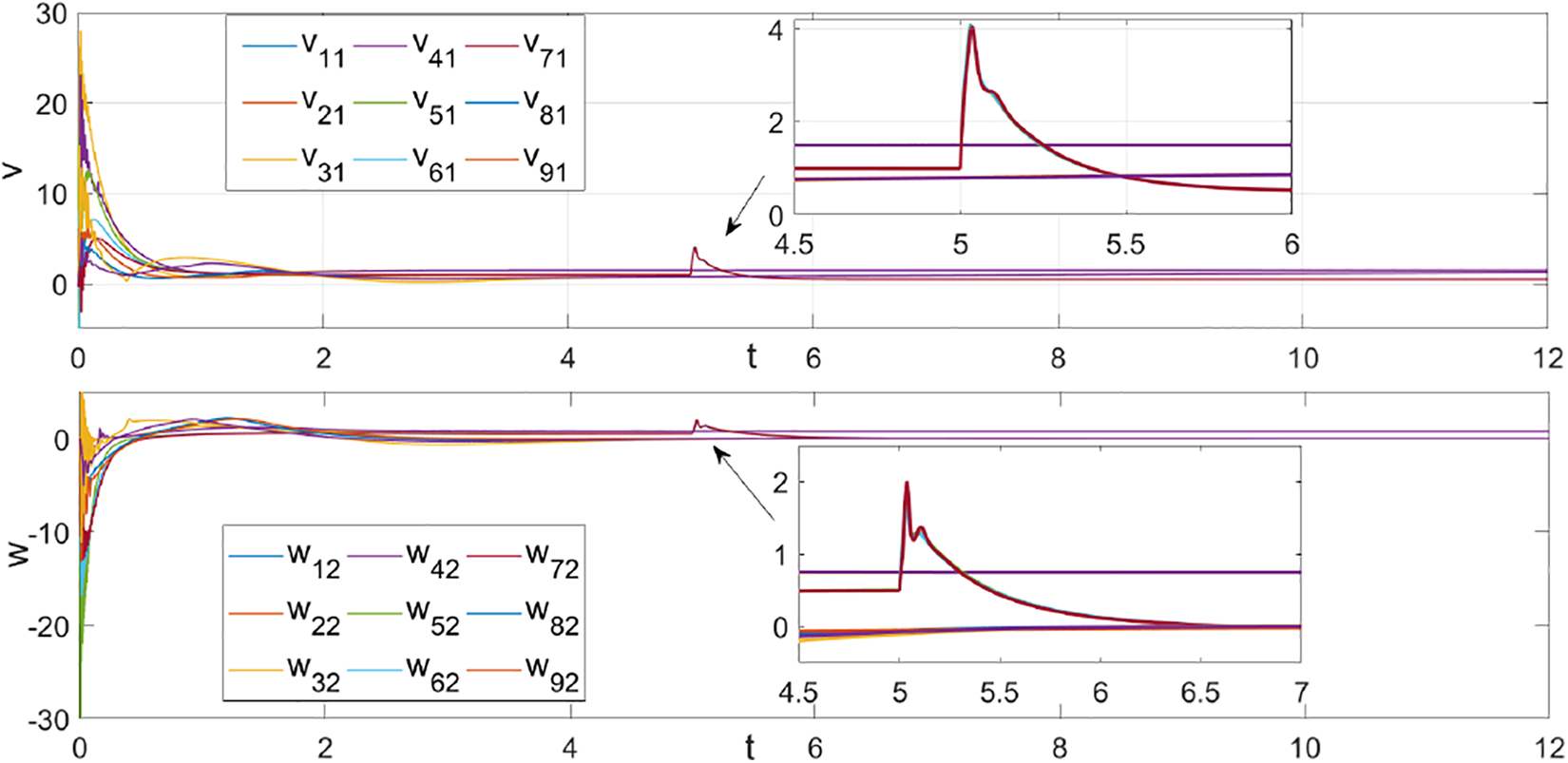
It can be observed from Figure 3 that the circular trajectory and the line-circle trajectory can be well tracked at a constant speed. In addition, the accelerating straight-line motion tracking can be also realized. The velocity consistency of the three subgroups is shown in Figure 4. The simulation results indicate that nine robots belonging to three subgroups can work cooperatively to accomplish subtasks. Noting that any trajectory can be divided into straight line and circle arc segments between any two points,46 it is reasonable to demonstrate the abovementioned continuous trajectories.
Trajectory tracking under network topology () in X-Y plane. X-axis and Y-axis represent, respectively, the values of robot position coordinate xi and yi.
Velocity responses of three subgroups in Figure 3 under (). t-axis represents time. V-axis and W-axis represent linear velocity and angular velocity, respectively.
For the second case, another composite tracking trajectories under are given by
Select , and the position initial values as , , , , , , , , , .
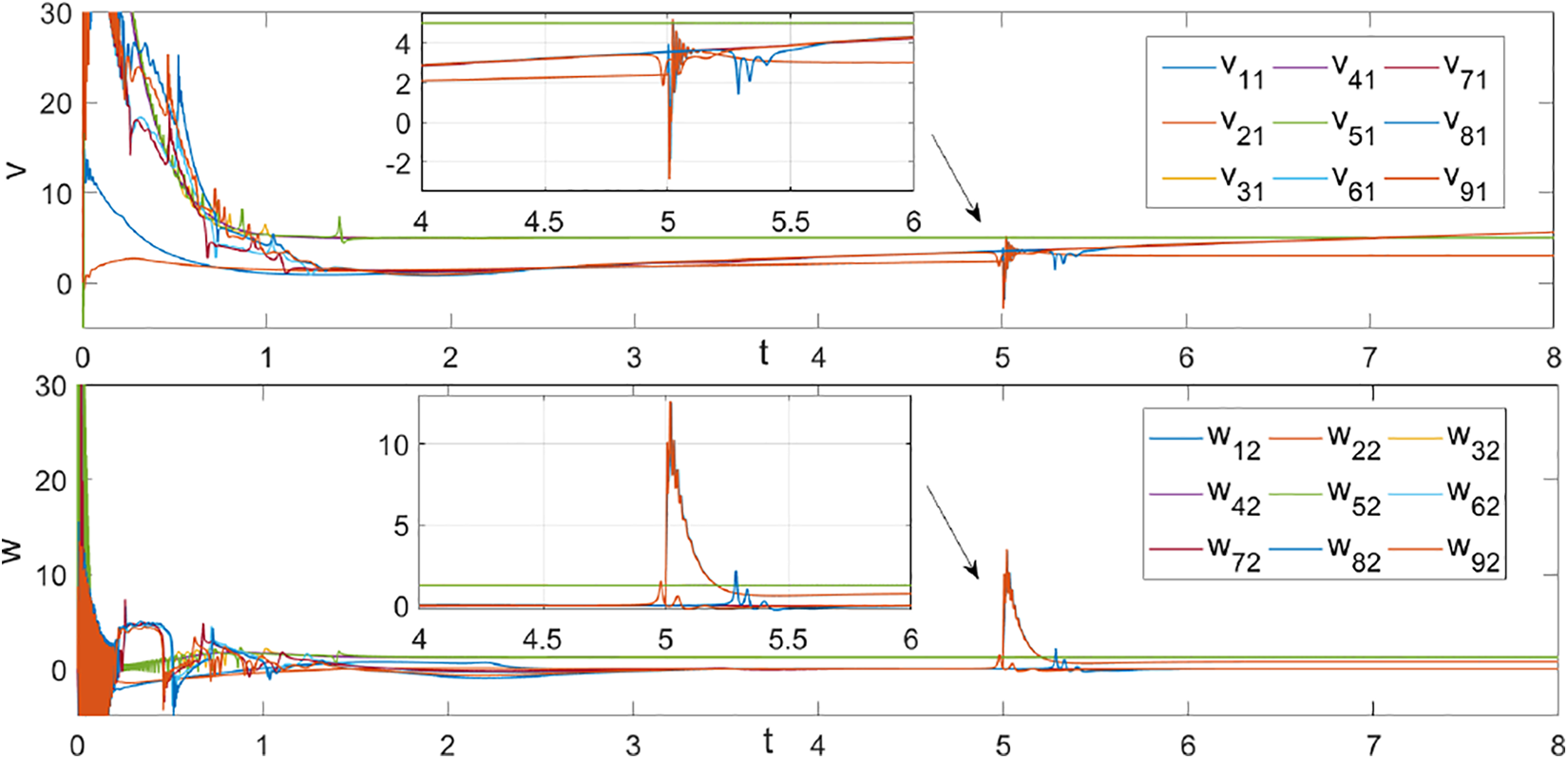
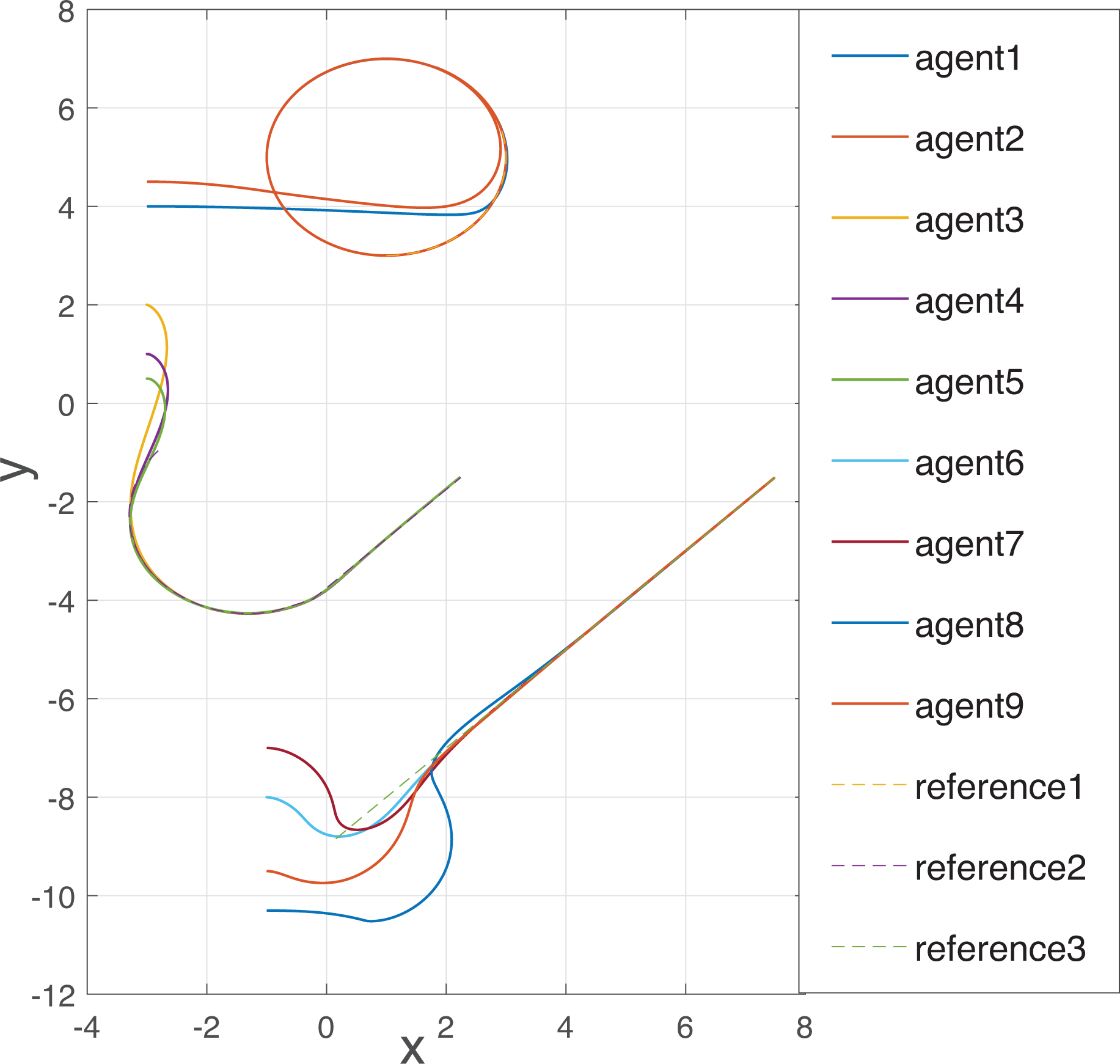
Figure 5 shows that each trajectory can be tracked at constant speed and accelerating speed effectively. Moreover, Figure 6 displays that the velocity states in each subgroup converge to a smooth line in a short time, implying the realization of group tracking consensus. It should be noted that the smoothness of the intersection point has a significant impact on the states of the line-circle trajectory. If the arc is tangent to the straight line, it can be seen from the magnified subgraph of Figure 4 that the change is smooth. If the arc intersects but is not tangent to the straight line, then the change is drastic, as shown in the magnified subgraph of Figure 6. This conclusion can provide certain reference for the path planning problems in engineering practice.
Trajectory tracking under network topology () in X-Y plane.
Velocity responses of three subgroups in Figure 5 under ().
Example 2. The impact on the performance (or negotiation speed) with different algebraic connectivity is considered in this example. A well-known observation is that the algebraic connectivity of dense graphs is relatively large.26 It is clear that the algebraic connectivity of is larger than that of . Select the same tracking trajectories and initial values as in Example 1. Figure 7 shows the tracking renderings under network topology (). Compared with the simulation results under different network topologies, especially at the bottom right corner of Figures 8 and 9, the angular velocities (vertical axis) show that the negotiation speed in is not higher than that in , that is, enhancing the algebraic connectivity of each subgroup, the manifestation of convergence rate is not significantly improved. This conclusion suggests that a simple network topology may be better since negative correlation arises between the performance and the algebraic connectivity in the evolution of group consensus for NNMMRSs.
The same tracking trajectories as in Figure 3 under network topology () in X-Y plane.
Velocity responses of three subgroups in Figure 3 under () during the time periods of . t-axis represents time. Vertical axis of the two figures at the top represents linear velocity and that at the bottom represents angular velocity.
Velocity responses of three subgroups in Figure 7 under () during the time periods of .
Example 3: This example focuses on the impact of the coupling strength on group tracking consensus. For convenience, three circular tracking trajectories are considered under network topologies and . The tracking trajectories are given as follows
Select , , and the position initial values as .
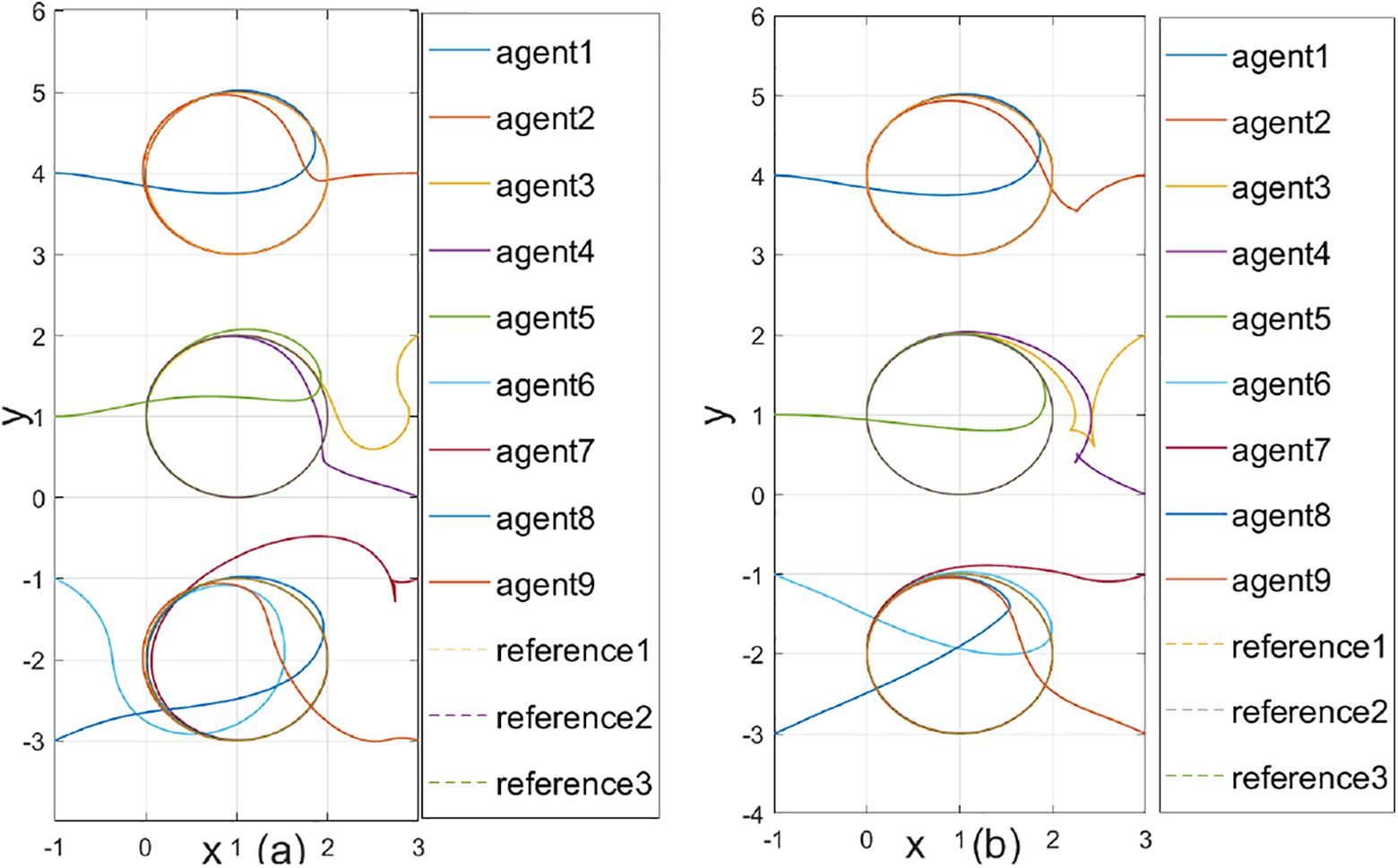
The simulations exhibited in Figures 10 and 11 reveal that, for group consensus, the coupling strength has a remarkable impact on the final consistent state, yet an interesting phenomenon is that the performance is negatively related to the coupling strength. No matter which network topology is considered, it can be seen from Figures 10 and 11 that, when , the position tracking of the third subgroup is not as effective as that when . In addition, the third subgroup negotiation speed in Figure 12 (, ) is not higher than that in Figure 13 (, ), which can be clearly seen from the magnified figures. This conclusion can be also obtained from the comparison of Figures 14 and 15 under . In sharp contrast to the complete consensus results of NNMMRSs,15 this distinction indicates that, for group consensus, weaker coupling strength may be better in practical engineering applications. Rigorous theoretical analysis will be pursued for further study.
Tracking of three circular trajectories under network topology in X-Y plane when (a) and (b) .
Velocity responses of three subgroups in Figure 10(a) (α = 3.0).
Velocity responses of three subgroups in Figure 10(b) (α = 0.75).
Tracking of three circular trajectories under network topology in X-Y plane when α = 3.0 (c) and α = 0.75 (d).
Velocity responses of three subgroups in Figure 11(c) ().
Velocity responses of three subgroups in Figure 11(d) ().
To put it simply, for NNMMRSs, on the premise of the given geometrical assumptions in Theorem 1, the coordination control problem of group tracking consensus is realized with satisfactory expected effects. Notably, due to the influence of the former subgroup on the latter subgroup, it takes a longer time for the latter subgroup to reach agreement regardless of whether the acyclic partition structure is complicated or simple.
Conclusions
This article has investigated the group tracking consensus problem of NNMMRSs. To guarantee the transient state performance of NNMMRSs, the designed algorithm embedded a kinematic and torque controller in the scheme. A coordinate transformation matrix, composed of a special arrangement of left eigenvectors that were associated with the Laplacian matrix zero eigenvalue, was constructed to facilitate the equivalent subsystem stability analysis. In the future, how to quantify the amount of communication that affects group consensus will be a challenging topic. In addition, it is hoped to realize group consensus for NNMMRSs in more general network topologies for further study.47–49
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work described in this paper was supported by the National Natural Science Foundation of China (grant numbers 61625304, 61703181, 62073209, and 61991415) and the Shandong Provincial Natural Science Foundation of China (grant numbers ZR2020KA005, and ZR2017BF021).
ORCID iDs
Jun Liu
Hengyu Li
References
1.
ChwaD. Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates. IEEE Trans Control Syst Technol2004; 12(4): 637–644.
2.
YangSXZhuAYuanG, et al.A bioinspired neurodynamics-based approach to tracking control of mobile robots. IEEE Trans Ind Electron2012; 59(8): 3211–3220.
3.
PanagouDTannerHGKyriakopoulosKJ. Control design for a class of nonholonomic systems via reference vector fields and output regulation. J Dyn Sys Meas Control Trans ASME2015; 137(8): 081011.
4.
EsmaeiliNAlfiAKhosraviH. Balancing and trajectory tracking of two-wheeled mobile robot using backstepping sliding mode control: design and experiments. J Intell Robot Syst2017; 87(3-4): 601–613.
5.
LiLLiuYHJiangT, et al.Adaptive trajectory tracking of nonholonomic mobile robots using vision-based position and velocity estimation. IEEE Trans Cybern2018; 48(2): 571–582.
6.
BrockettRW. Asymptotic stability and feedback stabilization. In: CoatesJHelgasonS (eds) Differential geometric control theory. 1st ed. Boston, MA: Birkhauser, 1983, pp. 181–191.
7.
De LucaAOrioloG. Trajectory planning and control for planar robots with passive last joint. Int J Rob Res2002; 21(5–6): 575–590.
8.
BayleBRenaudMFourquetJY. Nonholonomic mobile manipulators: kinematics, velocities and redundancies. J Intell Robot Syst2003; 36(1): 45–63.
9.
LiZXiaoHYangC, et al.Model predictive control of nonholonomic chained systems using general projection neural networks optimization. IEEE Trans Syst Man Cybern2015; 45(10): 1313–1321.
10.
JiangZPNijmeijerH. Tracking control of mobile robots: a case study in backstepping. Automatica1997; 33(7): 1393–1399.
11.
LeeTCSongKTLeeCH, et al.Tracking control of unicycle-modeled mobile robots using a saturation feedback controller. IEEE Trans Control Syst Technol2001; 9(2): 305–318.
12.
DongWFarrellJA. Decentralized cooperative control of multiple nonholonomic dynamic systems with uncertainty. Automatica2009; 45(3): 706–710.
13.
WangGWangCDuQ, et al.Distributed cooperative control of multiple nonholonomic mobile robots. J Intell Robot Syst2016; 83(3–4): 525–541.
14.
OuMSunHGuS, et al.Distributed finite-time trajectory tracking control for multiple nonholonomic mobile robots with uncertainties and external disturbances. Int J Syst Sci2017; 48(15): 3233–3245.
15.
LiuLYuJJiJ, et al.Cooperative adaptive consensus tracking for multiple nonholonomic mobile robots. Int J Syst Sci2019; 50(8): 1556–1567.
16.
RenWBeardRW. Distributed consensus in multi-vehicle cooperative control: theory and applications. 1st ed. London: Springer International Publishing, 2008.
17.
CaoYYuWRenW, et al.An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans Ind Inform2013; 9(1): 427–438.
18.
ZhuJLüJYuX. Flocking of multi-agent non-holonomic systems with proximity graphs. IEEE Trans Circuits Syst I2013; 60(1): 199–210.
19.
WangH. Flocking of networked uncertain Euler-Lagrange systems on directed graphs. Automatica2013; 49(9): 2774–2779.
20.
DongYHuangJ. Consensus and flocking with connectivity preservation of uncertain Euler-Lagrange multi-agent systems. J Dyn Sys Meas Control Trans ASME2018; 140(9): 091011.
21.
DimarogonasDVKyriakopoulosKJ. On the rendezvous problem for multiple nonholonomic agents. IEEE Trans Autom Control2007; 52(5): 916–922.
22.
OhKKAhnHS. Formation control of mobile agents based on distributed position estimation. IEEE Trans Autom Control2013; 58(3): 737–742.
23.
BechlioulisCPDemetriouMAKyriakopoulosKJ. A distributed control and parameter estimation protocol with prescribed performance for homogeneous Lagrangian multi-agent systems. Auton Robot2018; 42(8): 1525–1541.
24.
HockASchoelligAP. Distributed iterative learning control for multi-agent systems: theoretic developments and application to formation flying. Auton Robot2019; 43(8): 1989–2010.
25.
DuHWenGYuX, et al.Finite-time consensus of multiple nonholonomic chained-form systems based on recursive distributed observer. Automatica2015; 62: 236–242.
26.
Olfati-SaberRMurrayRM. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Autom Control2004; 49(9): 1520–1533.
27.
LiuXZhangKXieWC. Impulsive consensus of networked multi-agent systems with distributed delays in agent dynamics and impulsive protocols. J Dyn Sys Meas Control Trans ASME2019; 141(1): 011008.
28.
ZhaiJKarimiHR. Universal adaptive control for uncertain nonlinear systems via output feedback. Inform Sci2019; 500: 140–155.
29.
MirzaeiMAtrianfarHMehdipourN, et al.Asynchronous consensus of continuous-time Lagrangian systems with switching topology and non-uniform time delay. Robot Auton Syst2016; 83: 106–114.
30.
LiZDuanZ. Cooperative control of multi-agent systems: a consensus region approach. 1st ed. Boca Raton, FL: CRC, 2014.
31.
TrinhMHZhaoSSunZ, et al.Bearing-based formation control of a group of agents with leader-first follower structure. IEEE Trans Autom Control2019; 64(2): 598–613.
32.
WangCTnunayHZuoZ, et al.Fixed-time formation control of multi-robot systems: design and experiments. IEEE Trans Ind Electron2019; 66(8): 6292–6301.
33.
WuWZhouWChenT. Cluster synchronization of linearly coupled complex networks under pinning control. IEEE Trans Circuits Syst I2009; 56(4): 829–839.
34.
YuJWangL. Group consensus in multi-agent systems with switching topologies and communication delays. Syst Control Lett2010; 59(6): 340–348.
35.
ShangY. Group consensus of multi-agent systems in directed networks with noises and time delays. Int J Syst Sci2015; 46(14): 2481–2492.
36.
FengYXuSZhangB. Group consensus control for double-integrator dynamic multiagent systems with fixed communication topology. Int J Robust Nonlinear Control2014; 24(3): 532–547.
37.
LiuJJiJZhouJ, et al.Adaptive group consensus in uncertain networked Euler-Lagrange systems under directed topology. Nonlinear Dyn2015; 82(3): 1145–1157.
38.
RenW. Consensus strategies for cooperative control of vehicle formations. IET Control Theory A2007; 1(2): 505–512.
39.
HuangDZhaiJAiW, et al.Disturbance observer-based robust control for trajectory tracking of wheeled mobile robots. Neurocomputing2016; 198: 74–79.
40.
WangQChenZYiY. Adaptive coordinated tracking control for multi-robot system with directed communication topology. Int J Adv Rob Syst2017; 14(6): 1–10.
41.
FukaoTNakagawaHAdachiN. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans Robot Autom2000; 16(5): 609–615.
42.
CampionGD’Andrea-NovelBBastinG. Controllability and state feedback stabilizability of nonholonomic mechanical systems. In: De WitCC, et al. (eds) Advanced robot control(Lecture Notes in Control and Information sciences). 1st ed. New York, NY: Springer, 1991, pp. 106–124.
43.
SlotineJJELiW. Applied nonlinear control. 1st ed. New Jersey: Prentice-Hall, 1991.
44.
QinJYuC. Cluster consensus control of generic linear multi-agent systems under directed topology with acyclic partition. Automatica2013; 49(9): 2898–2905.
45.
MiaoZYuJJiJ, et al.Multi-objective region reaching control for a swarm of robots. Automatica2019; 103: 81–87.
46.
SarkarNYunXKumarV. Control of mechanical systems with rolling constraints: application to dynamic control of mobile robots. Int J Rob Res1994; 13(1): 55–69.
47.
AltafiniC. Consensus problems on networks with antagonistic interactions. IEEE Trans Autom Control2013; 58(4): 935–946.
48.
ValcherMEMisraP. On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Syst Control Lett2014; 66(1): 94–103.
49.
HuJWuYLiuL, et al.Adaptive bipartite consensus control of high-order multiagent systems on coopetition networks. Int J Robust Nonlin2018; 28(7): 2868–2886.