
Abstract
With the increasing complexity of modern industry, the traditional single-target control of swarm robots can no longer meet application requirements. Hence, this article addresses compound task control for swarm robot systems, where the control aim and the dynamics of the robot are modeled by static group-bipartite consensus and Euler–Lagrange systems, respectively. After introducing the concept of static group-bipartite consensus in networked Euler–Lagrange systems, a distributed group-bipartite consensus control protocol with integral action is designed, and the criterion that ensures that static group-bipartite consensus is reached is presented. The most remarkable feature of the proposed algorithm is that it can accurately calculate the final state of system convergence. Finally, simulation examples are presented to verify the theoretical results.
Keywords
Introduction
Various coordinate behaviors of networked multi-agent systems can emerge, such as complete consensus or synchronization, 1 group consensus (GC), 2 cluster consensus, 3 and bipartite consensus (BC), 4 among others. According to these coordinate behaviors, much research has been carried out from many perspectives, for example, with various network structures—cooperative 1 and competitive 5 forms; control methods—adaptive control, 6 finite-time control mode, 7,8 event-triggered methods, 9,10 impulse coupling, 11 and the Udwadia–Kalaba approach 12 ; dynamic models—first-order integral models,[ 1,13 second-order integral models, 14 generalized linear systems, 3 nonlinear systems that satisfy the Lipschitz condition, 15 and ELSs. 12 Among these, group-bipartite consensus (GBC) and Euler–Lagrange (EL) dynamics are a typical coordinate behavior and dynamic model, respectively. GBC is defined in our previous work, 13 and such a consensus form can describe multiple complex control aims well. The GBC demonstrates multiple origin-symmetric states, which distinguishes from BC and GC, and can be seen as an effective combination of BC and GC. Based on its unique convergence state, GBC can effectively depict multiple symmetric control objectives in modern industrial production. For additional details on GBC, one can refer to Liu et al. 13
In addition, a class of industrial robot dynamics can be well modeled by the EL equations, including the dynamics of industrial manipulators, space robots, and self-driving cars. 16 Many modern industrial applications can involve the coordinate control of ELSs, such as target tracking in sensor networks 17 and environmental monitoring. 18 For this reason, much work has been done on coordinated control for networked ELSs. For example, the robust synchronization control problem of networked ELSs is studied by considering disturbances, network delays, and uniformly connected switching networks. 19 By using the estimator method, hierarchical control protocols are introduced to study the coordination of ELSs. 20 An optimal position algorithm is designed to minimize a global cost function of networked ELSs, where the presented control law is fully distributed. 21 The distributed boundary control problem of swarm flexible manipulators is investigated using semigroup theory. 22 The leader-following consensus issue for multiple robots is studied by using a distributed position feedback control strategy over switching networks. 23 An adaptive containment control law for networked ELSs is presented in Corral et al. 24
Among a variety of swarm robot models, 24 –27 the networked ELSs model has a wide range of engineering applications, especially in the complex and integrated production process, where the flexibility, reliability, manipulability, and scalability are highly required. Moreover, the networked ELSs can represent a class of networked robotic systems due to their ability in dealing with complex systems involving multiple dynamics, such as multiple robotic manipulators, formation flying spacecrafts, and autonomous vehicles. However, the traditional single-target coordination control of the networked ELSs is no longer applicable to modeling requirements of swarm robots in modern industrial production, where the complex behaviors and characteristics such as multilevel, multi-structure, and multi-scale are emerged. Based on the above background, a natural problem arises: How to establish a reasonable compound task model for swarm robot systems described by networked ELSs? An effective way to solve this problem is how to reasonably improve the compound control target model proposed in networked multi-agent systems to apply to swarm robot systems. Note that the BC introduced by Altafini 4 is an excellent bilateral symmetrical compound task model, and many studies investigated the BC of networked robot systems using various control methods, such as the auxiliary system approach, 28 the adaptive strategy, 29 and the finite-time coordination strategy. 30 Furthermore, as a further extension of BC, GBC fully combines the characteristics of GC and BC and can well describe the multiple symmetric tasks for modern industrial production. However, for the GBC case, very little research has been conducted on this topic. By considering this background, this article studies the GBC problem in networked robot systems that are modeled by the EL equation. We propose a distributed GBC control protocol that ensures the achievement of static GBC. The control strategy that is proposed in this article has an integral action by which the final GBC states can be expressed explicitly. Compared with previous articles, the current article has the following three innovation points. (1) The concept of static GBC in networked ELSs is introduced, which can well describe the multiple static symmetry control aims in practice. (2) The final convergence state can be explicitly expressed by the initial value of the position and the vectors in the null subspace of the Laplacian matrix. (3) By decomposing the whole controlled system into subsystems, this article develops a GBC convergence stability analysis method.
Preliminary
Graph theory
The associated graph notations and definitions are standard.
Suppose
Assumption 1
The partition
Under Assumption 1, the network graph
where
Meantime, to describe the bipartite characteristic of the GBC, the following assumption should also be introduced.
Assumption 2
Each
For the i-th group

Problem formulation
Suppose that the dynamics of robot i are modeled by the EL equation as

where
Property 1
There exist positive constants
Property 2
Property 3
With the partition
Definition 1
ELSs (1) reach static GBC under the control law
Static GBC in networked ELSs
This section presents a static GBC control protocol for ELSs (1). Toward this aim, the whole discussion will be conducted under Assumptions 1 and 2, and the following assumption is introduced. 13
Assumption 3
Assumption 4
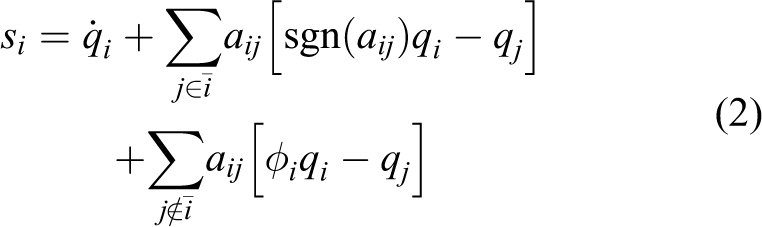
For the i-th robot agent, a slide vector si is defined as
Then, the corresponding auxiliary velocity

The second sliding vector

where

where

where
Remark 1
In contrast to Wang,
32
in the current article,
Remark 2
The integral action item design is borrowed from Wang, 32 and the major differentiator is the integrand function, which contains GC and BC network topology structure information. For this reason, the control method that is constructed by equations (2) to (6) with integral action can be used to realize GBC in the swarm robot system (1).
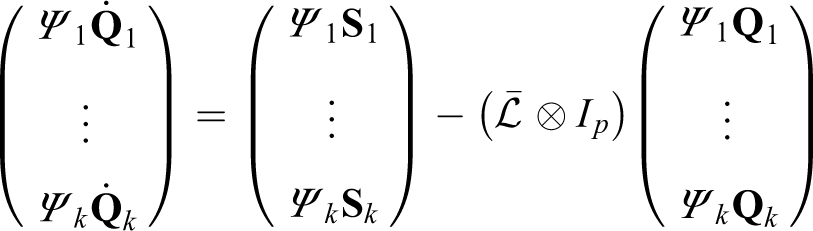
Using equations (5) and (6), a controlled networked robot system (1) has the following form

where
Theorem 1
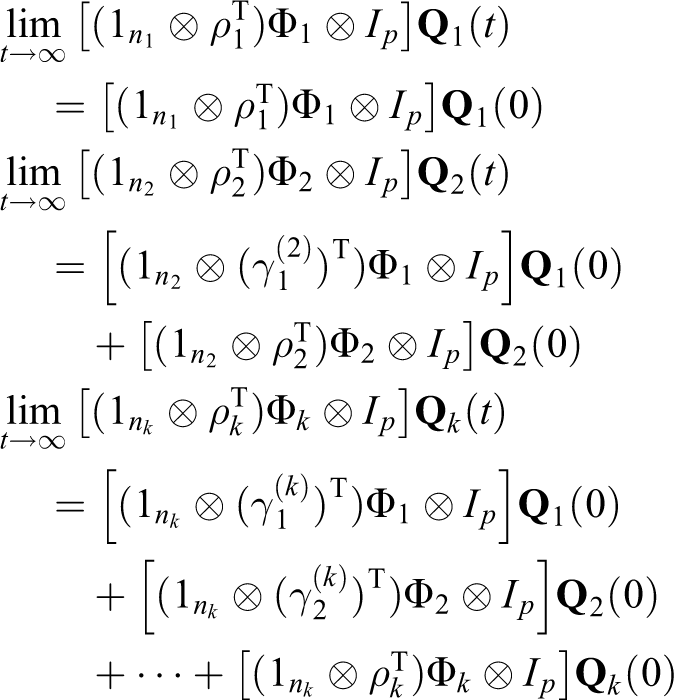
Suppose Assumptions 1 to 3 hold. Using equations (5) and (6) for the ELSs (1), the systems (1) reach static GBC if Assumption 4 holds. Furthermore, the final convergence states of the ELSs (1) are
Proof
It is easy to see that under Assumption 3,
Moreover, all entries of the left eigenvector

Then, the matrix

which satisfy
The coordinate transform matrix

where


where
Define

Hence,

Combining equations (8) and (9) yields

From the structure of the matrix

where

with the input
Combining equations (11) and (12), we obtain

and
Then, the boundedness of
Additionally, from equations (10) and (11) and the self-similarity of each

Therefore,

Integrating equation (14) yields

Equation (4) and
Since
Group-bipartite network topology algorithm.

Remark 3
By adding an integral action into the adaptive control law (5) in Algorithm 3, the networked robot systems (1) reach the static GBC that is defined in Definition 1 under the conditions in Theorem 1. Moreover, the final static GBC state can be expressed explicitly by the eigenvectors of the corresponding Laplacian matrix and the initial values of the positions. It is easy to see that when
Remark 4
The acyclic partition indicates that the front groups can affect the back groups but not the reverse. Therefore, the convergence analysis of the controlled systems can proceed according to the subgroup indices. The first group cannot receive any information from other groups; therefore, we can study the BC problem of the first group. Then, by using the BC result in the first group and the second system in equation (10), we can analyze the BC problem in the second group. Repeating this process, we can also obtain the stability analysis results for the controlled system instead of the proof of Theorem 1.
Simulations
Corresponding simulations will be conducted by Matlab in this section. The networked ELSs that are considered in this section are composed of seven revolute joint manipulators, and the equations and parameters are the same as in Example 1 in Liu et al.
2
Figure 1 presents the structure of the i-th robot node. In this case, the parameter constant vector estimate

and therefore,


The structure of the i-th robot.

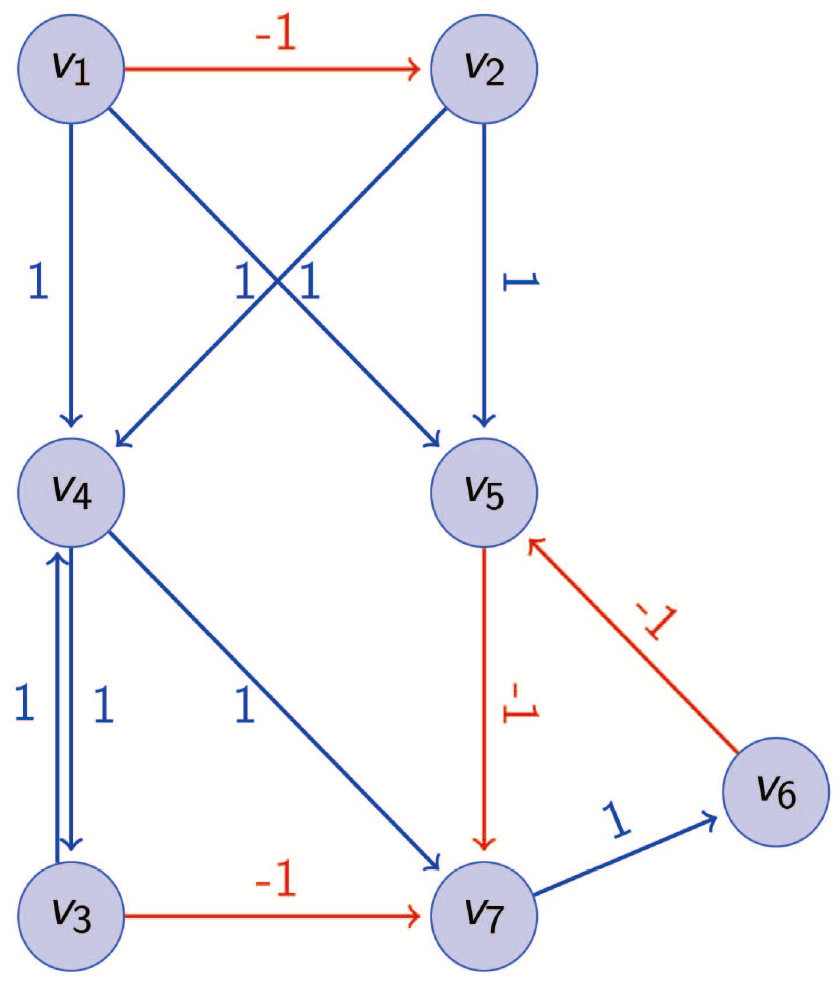
Graph topology with all subgroups being structurally balanced.
It is easy to see that

Trajectories of qi
(the first coordinate),
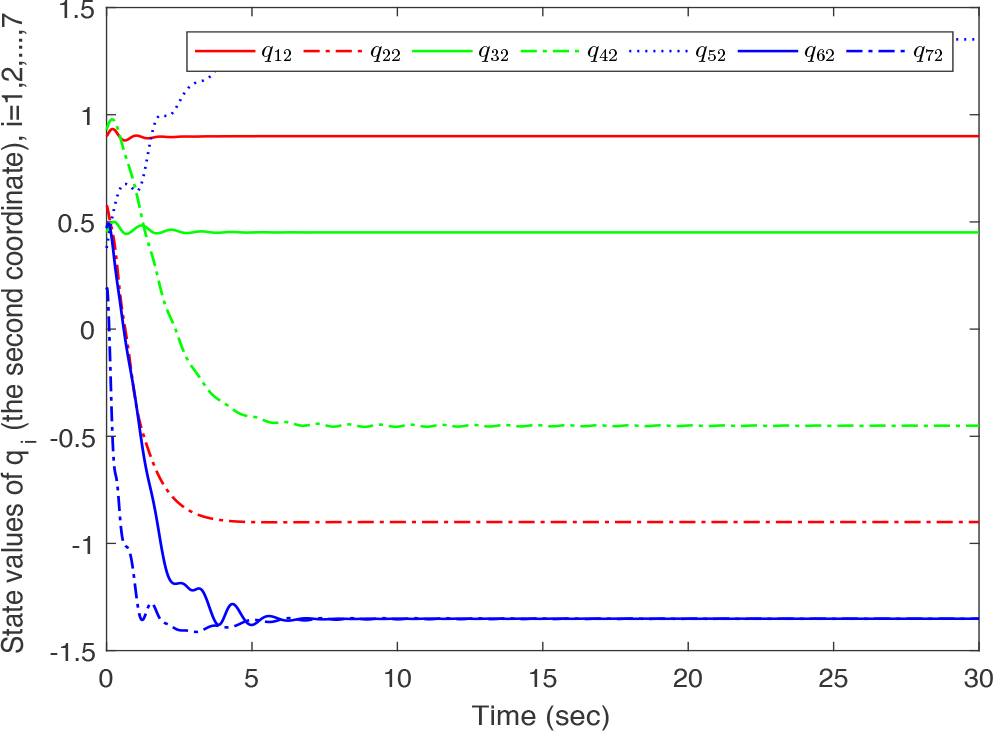
Trajectories of qi
(the second coordinate),

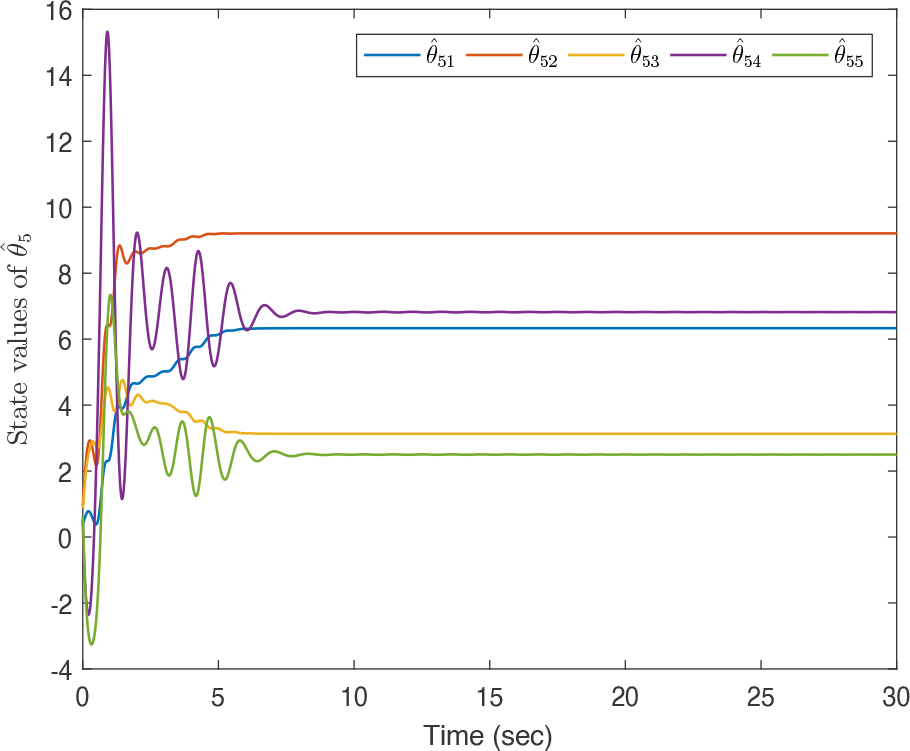
Trajectories of

Trajectories of

Evolutionary process of
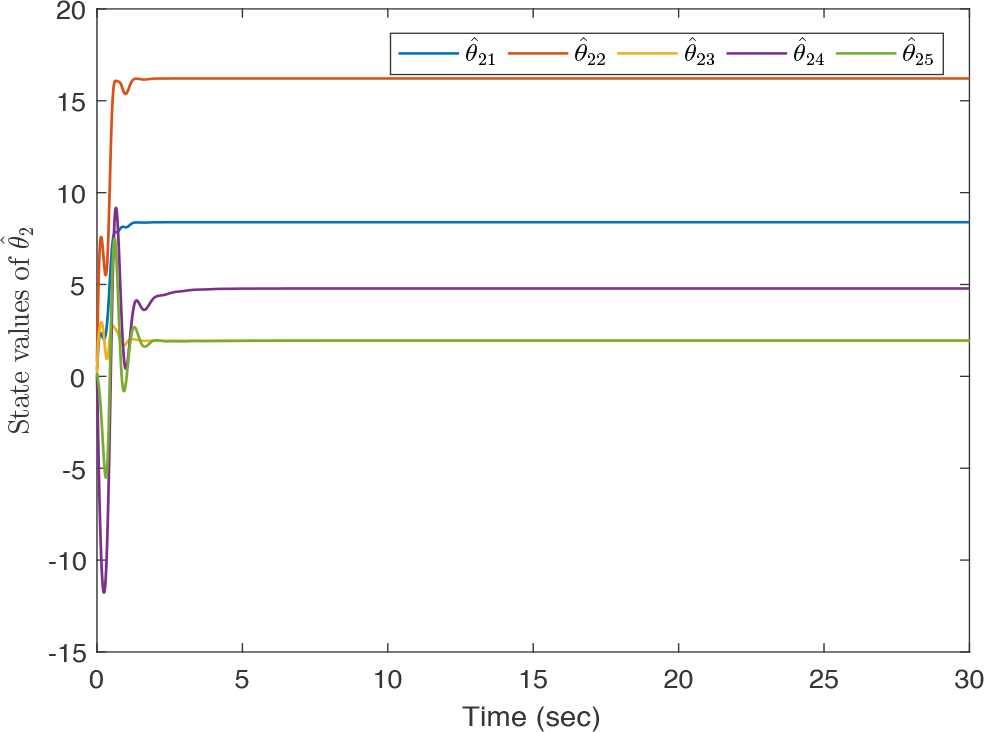
Evolutionary process of

Evolutionary process of

Evolutionary process of
Evolutionary process of

Evolutionary process of

Evolutionary process of
In contrast, some groups often have cooperative topologies, and other groups often exhibit cooperative and competitive coexistence. Figure 14 presents a graph topology with the acyclic partition

It is easy to see that the final convergence state should be BC between the first and third groups and convergence of the second group to complete consensus. We obtain

Graph topology with the second group being cooperative.
We select the same initial value and control design weights as discussed above. Figures. 15 to 18 present the position and velocity evolution processes over time, which indicates that the first and third groups reach BC and that the second group reaches complete consensus.

Evolutionary process of qi
(the first coordinate),

Evolutionary process of qi
(the second coordinate),

Evolutionary process of

Evolutionary process of
Conclusions
By introducing the concept of static GBC into swarm robots that are modeled by EL dynamics, a mathematical model of the compound task has been constructed in this article. Accordingly, this article has investigated the static GBC problem for ELSs. By utilizing the structure of the acyclic partition network topology, a static GBC control protocol has been presented, and geometric criteria for ensuring that multiple symmetric consensus is achieved in networked robot systems have been established. The range of topologies that have been discussed in this article is somewhat limited, and this issue will be considered in a more general network topology range in our future work.
Footnotes
Acknowledgments
The authors would like to thank the editor and the reviewers for their insightful and constructive comments on which the quality of this article has been improved.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grants 61703181, 62073209, and 61991415, in part by the Shandong Provincial Natural Science Foundation of China under grant ZR2020KA005, in part by the Shanghai Municipal of Science and Technology Commission under grant 21SQBS00300, and in part by the Key Research and Development Project of Shandong Province of China (Soft Science) under grant 2021RKY02033.