
Abstract
This article focuses on the problem of path following for underactuated unmanned surface vehicles (USVs) considering model uncertainties and time-varying ocean currents. An extended state observer (ESO)-based integral line-of-sight (ILOS) with an integral sliding mode adaptive fuzzy control scheme is proposed as the main control framework. First, a novel ESO is employed to estimate the surge and sway velocities based on the kinetic model, which are difficult to measure directly. Then, the adaptive ILOS guidance law is proposed, in which the integral vector is incorporated into the adaptive method to estimate the current velocities. Meanwhile, an improved fuzzy algorithm is introduced to optimize the look-ahead distance. Second, the controller is extended to deal with the USV yaw and surge velocity signal tracking using the integral sliding mode technique. The uncertainties of the USV are approximated via the adaptive fuzzy method, and an auxiliary dynamic system is presented to solve the problem of actuator saturation. Then, it is proved that all of the error signals in the closed-loop control system are uniformly ultimately bounded. Finally, a comparative simulation substantiates the availability and superiority of the proposed method for ESO-based ILOS path following of USV.
Introduction
In recent decades, intelligent control of unmanned surface vehicles (USVs) has become one of the most challenging topics in the nonlinear control community and has attracted great attention in the marine, military, and commerce fields for applications, such as path following, collision avoidance, and formation control. 1 –5 The problem of USV path following has expanded over the past decade and is a thorny aspect of USV intelligent control because of its complicated mathematical model. Additionally, a difficult problem is that only the surge and yaw direction can be directly controlled, while the sway velocity is passive for most USVs.
Most USVs are underactuated in that the number of actuators in the mechanism is less than its degree of freedom. Although an underactuated system is more complex than a full-drive system, the former possesses several advantages including conservation of energy, material, and space. 6,7 The authors proposed the underactuated spherical parallel mechanism-based robotic ankle exoskeleton, and the lightweight mechanism in low-carbon design was verified. In the literature, 8 a detailed calculation model for each stage of the sustainable supply chain was proposed, and findings revealed that the underactuated system can be used to achieve lightweight and energy saving, thereby leading to a low carbon footprint. The underactuated system has its special values, but it needs to achieve breakthroughs or unprecedented innovations in both theoretical and practical techniques. At present, research on this type of system has become popular in USVs and robotics, 6 –10 and the control of underactuated systems has been researched mainly by state stabilization, trajectory tracking, and path following. 6 High nonlinearity renders the control of such tasks particularly challenging.
The control objective of the USV path following is to keep it following a reference path without time constraints. In other words, the position tracking errors should be ultimately bounded. A conventional method to achieve convergence to the reference path is to apply a line-of-sight (LOS) guidance law emulating an experienced mariner, 11 this method has been popularized in the USV path following system. 1,12,13 Several authors have studied the traditional LOS guidance law, but it is vulnerable to external influencing factors, such as wind, waves, and ocean currents. The most severe problem is that the sideslip angle of the USV magnifies the tracking error signals and can even lead to divergence or oscillation of the entire cascade control system. The most straightforward method to compensate for the sideslip angle is to measure it using high-precision sensors. 14 However, these sensors are difficult to implement due to their high costs in practice. Some researchers solve these problems by coalescing the sideslip angle with the course angle. One such scheme is the integral LOS (ILOS) method, 13 which was devised by adding an integral term to the original LOS guidance law. Similarly, Mu et al. 15 developed an adaptive LOS (ALOS) scheme, in which an adaptive method was introduced to calculate the sideslip angle. The ALOS scheme is a specific type of ILOS with a time-invariant or slow time-varying sideslip angle. These methods seem incapable of dealing with a fast time-varying sideslip angle. Based on the above analysis, extended state observer (ESO)-based LOS (ELOS) 16 and predictor-based LOS (PLOS) 12 methods were proposed, in which the ESO and predictor were introduced to calculate the sideslip angles with any rate of change and encapsulated into the LOS guidance laws. However, the simplified operations in ELOS and PLOS require that the sideslip angle should be in a small range. In this context, Wang et al. 17 proposed a novel observer to precisely calculate the sideslip angle with any magnitudes within a short time. USVs have long suffered from ocean currents in practice, whereas the aforementioned studies did not consider ocean current velocities. Note that the ocean currents can destabilize the cascade system. Miao et al. 18 proposed a novel compound line-of-sight (CLOS) scheme, in which the sideslip angle and the time-varying ocean currents can be accurately estimated and compensated simultaneously. Given the accompanying computational complexity, an adaptive ILOS guidance law was presented by Zheng and Sun 19 and suited to any parametric path. Ocean currents could also be calculated based on the adaptive law.
The problem of control design in the execution module represents another indispensable aspect of the path-following cascade control system. Essentially, the execution module control system should be designed to force the USV state to track the reference signals of the proposed LOS guidance law. When controlling an underactuated system, the first problem is controllability; this system is complex and nonlinear, such that linear control theories cannot be directly applied. Underactuated systems must be analyzed using nonlinear controllability theory based on their own characteristics. Extensive research has presented controllability analysis of underactuated systems. From the mathematical standpoint, the authors 20 –22 provided a theoretical basis for the controllability analysis in underactuated systems. The control of the underactuated system is always realized using motion coupling or dynamic coupling. 23 –26 In a controllable system, an effective control technique is backstepping control, which has been widely adopted given its systematic calculated amount. 17,26,27 The backstepping technique can eliminate the constraint that the relative degree must be 1 in classical passive systems. However, the heavy calculation burden of backstepping makes some control strategies impractical. From this point of view, the active-disturbance-rejection controller (ADRC), trajectory linearization controller (TLC), and sliding mode controller (SMC) have been proposed by many researchers. In the literature, 28 a control scheme combining the LOS guidance law with the ADRC technique was proposed to make the USV follow a reference parameterized curved path. Liu et al. 29 introduced the TLC scheme in relation to USV path following and illuminated a new direction in TLC technology. Considering the robustness to external disturbances, parameter perturbations, and unmodeled dynamics, SMC is an effective and powerful advanced controllers that have been developed considerably in USV and robot areas. 30 –35 In practical applications, SMC has successfully applied to underactuated biped robot, 36 satellites, 37 and overhead crane. 38 For example, sliding mode observer was designed by Van et al. 39 to estimate the robot velocities in the presence of model uncertainties and external disturbances. A backstepping sliding mode AUV path-following control algorithm was proposed by Liang et al. 40 However, the single SMC usually cannot satisfy the system requirement, such as high efficiency and strong robustness. In this case, a hybrid control scheme that switched between proportional-derivative (PD) control and SMC was proposed by Ouyang et al. 31 for tracking control of robot manipulators, where PD control was used to stabilize the controlled system, while SMC was used to compensate the disturbance and uncertainty and reduce tracking errors. In the literature, 30 the integral SMC (ISMC) was first employed for USV trajectory tracking. Moreover, the ISMC was introduced to the USV path following control 26 and applied in the attitude loop and surge velocity loop, respectively, findings were fairly encouraging. In the literature, 41 an adaptive SMC (ASMC) method was designed for the parallel robot with six prismatic actuators in the presence of actuator fault. In the literature, 42 a proportional-integral-derivative SMC (PID-SMC) trajectory tracking scheme was proposed, in which the PID-SMC can ensure all the tracking errors converge to zero within a finite time in sliding and approaching mode. Besides, terminal SMC (TSMC) 43 and iterative SMC 44 were also widely used in USV and robot motion control. Considering the chattering caused by the sign functions in SMC, most actuators cannot suffer from this phenomenon in reality. Researchers have thus presented many approaches to preventing this issue, such as by using the continuous sigmoid function instead of the sign function, 45 adding a filter, 46 introducing a fuzzy/neural network to approximate the sign function, 47 or applying mathematical optimization to the switching function. 48
System uncertainty and disturbance are common in practical control systems. The robustness against them is critical for motion control of USV. A variety of methods were proposed to deal with the uncertainty, ranging from Fourier series expansion, 49 observers, 50 and neural networks 51 –53 to fuzzy techniques. Fuzzy control is an early form of intelligent control and it imitates the ambiguity of human’s thought and controls objects using the control experience of human experts. 6 A weakness of fuzzy techniques is that approximator accuracy relies on the number of nodes. An effective approach involves estimating the norm of the ideal weighting vector by replacing the vector elements. From this point of view, in the literature, 34 an adaptive fuzzy control method was proposed to estimate model uncertainty and achieve remarkable tracking performance in terms of both tracking and unknown estimation. In the literature, 54 the fuzzy techniques were used to estimate the model uncertainty and external disturbance simultaneously. Considering the structure of approximator, Wang and Er 55 proposed a self-constructing fuzzy control USV trajectory tracking scheme, which contained self-learning membership functions and parameter adaptation.
Every input into real systems should be bounded by actuators’ physical restrictions. The actuator saturation (i.e. input saturation) tends to be ignored when designing control systems. Actuator saturation can strongly influence the stability of systems, such as undershooting, lag, and performance degradation. To solve this physical problem, Chen et al. 56 proposed an auxiliary dynamic system to compensate for the input constraints. The system states were applied for the adaptive tracking control design in uncertain MIMO nonlinear systems. In the literature, 57 a finite-time trajectory tracking scheme was proposed based on PD plus dynamics compensation in the presence of input saturation, where the Sat function was introduced to deal with the saturation problem. In the literature, 19 an auxiliary design system was presented to compensate for the surge and yaw controller in an underactuated USV, and the uniformly ultimately bounded (UUB) stability was confirmed for the cascade path following system.
In this article, an ESO-based ILOS (EILOS) guidance law and adaptive fuzzy SMC (EIAFSM) with actuator saturation are proposed for USV path following in the presence of ocean current velocities and external model uncertainties. The ESO is developed to identify surge and sway velocities considering their immeasurability, and the ILOS guidance law is designed to produce the reference heading angle. In addition, an improved algorithm is proposed for look-ahead distance. Then, the SMC is designed to maintain the USV surge velocity and heading angle tracking the reference signals generated by the LOS guidance law. Meanwhile, the USV model uncertainty and sign functions in the control law are estimated using the fuzzy logic system (FLS), and an auxiliary system is provided to compensate for the part exceeding the actuator limit.
The remainder of this article is structured as follows. Several necessary preliminaries and explanations about the USV model are detailed in the second section. The EILOS guidance scheme is introduced in the third section. The fourth section outlines the actuator control method for USVs. The system convergence analysis is presented in the fifth section. The sixth section provides an example to illustrate the feasibility of the proposed method, and the seventh section offers our conclusion and directions for future work.
Preliminaries
Lemmas
Definition 1.

Lemma 1. If

where C is a non-negative parameter and
Lemma 2. The USV input signal

Lemma 3. For

where
Unmanned surface vehicle models
This subsection describes the USVs’ kinematic and dynamic models with ocean currents. The mathematical model of a USV on a horizontal plane can be described as follows
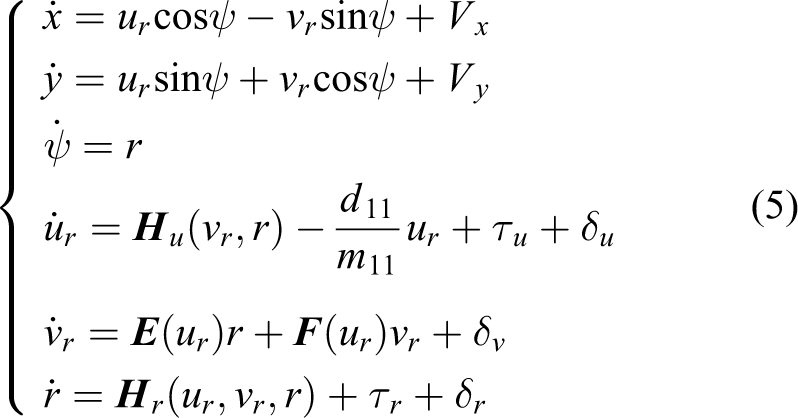
where
Assumption 1. The absolute USV resultant velocity U, heading angle
Assumption 2.
Assumption 3. The ocean currents are assumed to be slow changing such that
Assumption 4. The time derivatives of ur and vr are bounded.
Control objective
This article aims to propose a control algorithm to keep the USV following a prescribed path parameterized by
Remark 2. More precisely, the objective of the velocity is to realize
Guidance subsystem design
The schematic diagram of USV path following and an EILOS guidance law are presented in this section. The LOS geometry is shown in Figure 1.
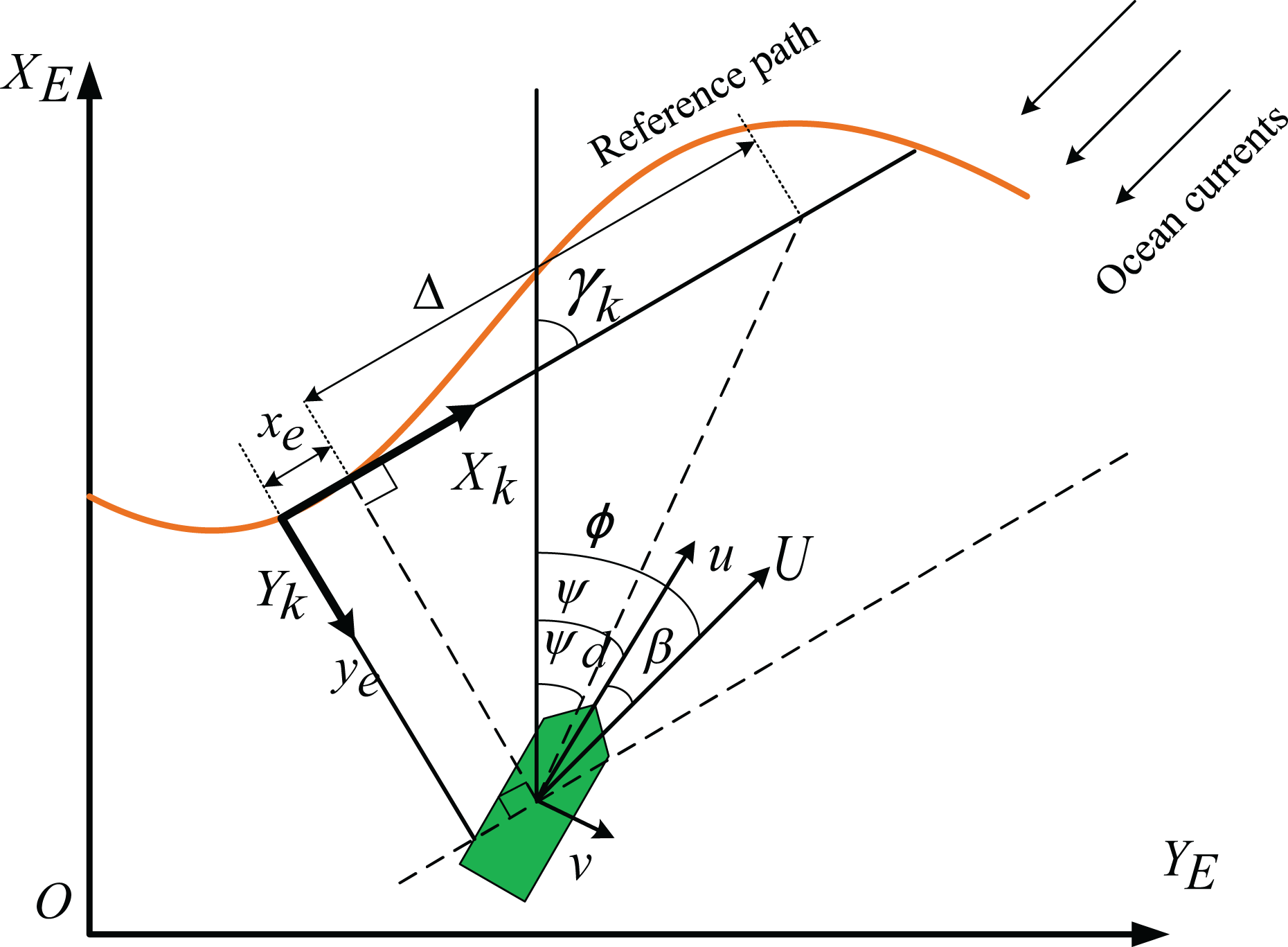
LOS guidance geometry. LOS: line-of-sight.
Let
Assumption 5. The guidance signal
As shown in Figure 1, the along- and cross-tracking errors

Similar to equation (6), we have

where um
represents the virtual speed of the desired path and
The time derivative of the along-tracking error is expressed by

Similarly, we have

Substituting equations (5) to (7) into equations (8) and (9) results in

where
To estimate the relative velocities of the USV, two novel ESOs are proposed as follows

and

where
Remark 3. The ESO system is significantly different from the ESOs provided in the literature.
63
We take ocean currents into account, two compulsory terms
Note that

The guidance law is presented as

where
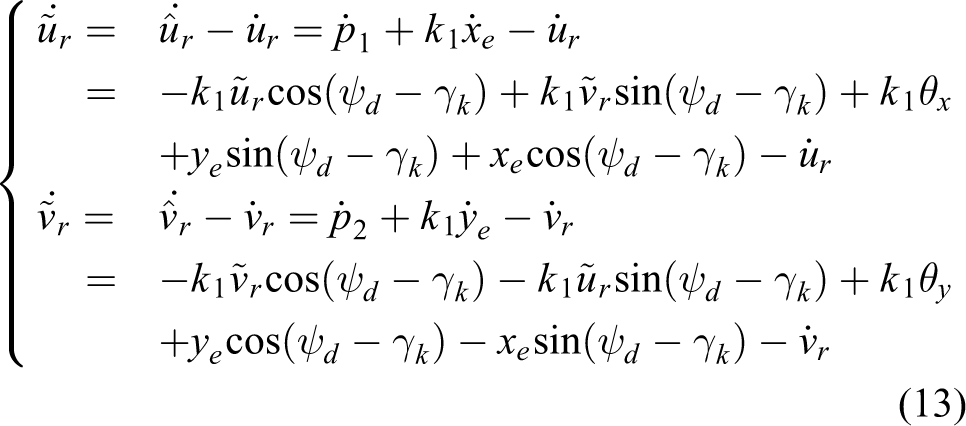
Define (
In equation (14), um can be treated as the moving speed of the reference path and is proposed as

where k
2 is a positive constant. Therefore, the update law of the path variable

Remark 4. Note that the physical meaning of virtual variable um
is that the speed of the reference path and its value depend on some USV state variables, such as ur
, vr
, xe
, and
The derivative of ye can be rewritten as

where
Substituting equation (15) into equation (18) yields

Note that the ocean current parameter

Then, the position errors dynamic system (14) becomes
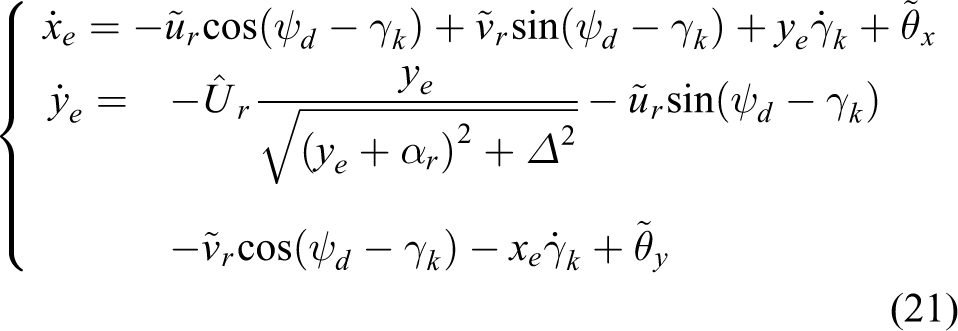
Solving for

The condition
Design the adaptive law for ocean currents parameters as follows

Remark 5. The magnitudes of the ocean current velocities can be a far cry from USV. Therefore, if the initial conditions of (
Theorem 1. The subsystems (10) and (13), viewed as a guidance system containing position tracking errors (
Proof. Considering the following Lyapunov function candidate (LFC)
where

It yields that

where
Thus, V
1 is a monotone decreasing function outside the range

and it follows that the errors
The look-ahead distance,
Fuzzy rules of


The fuzzy surface.
As shown in Figure 3, the EILOS guidance law is a part of the whole path following the scheme of USV. We can employ the guidance law together with the actuator control system, which will be designed later using the sliding mode technique, FLS, and an auxiliary dynamic system.
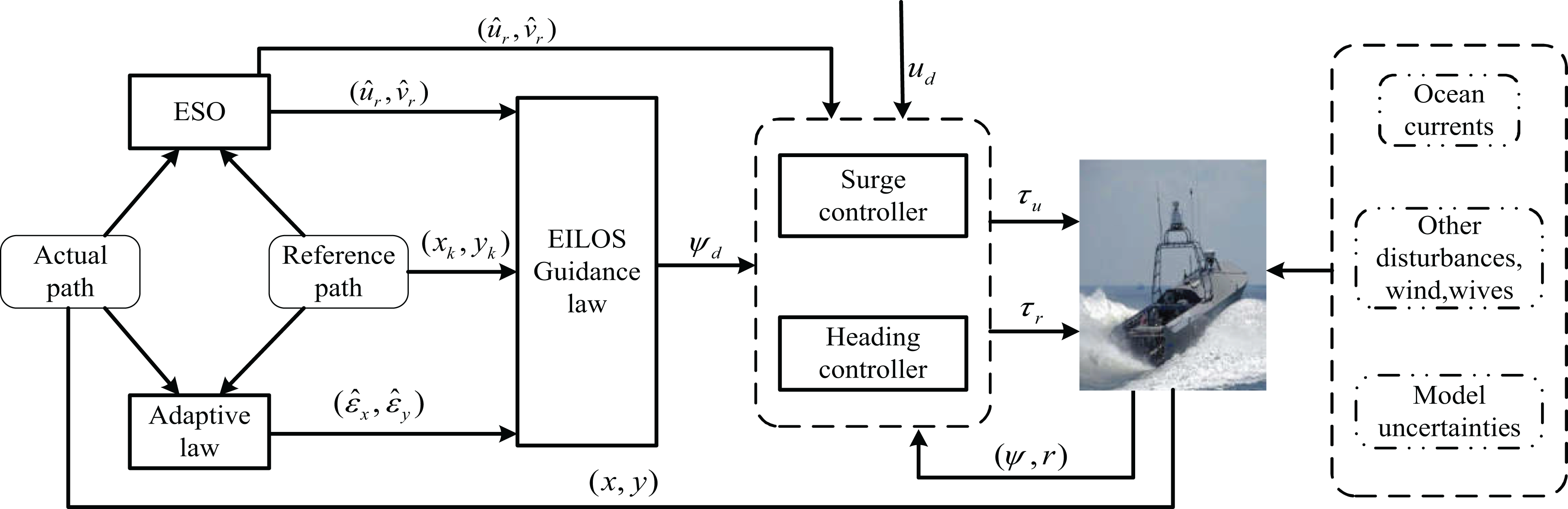
Block diagram of the proposed USV path following strategy. USV: unmanned surface vehicle.
Control subsystem design
In this section, the control laws
Velocity tracking control
ud
denotes the desired absolute surge velocity, as shown in Figure 3. To facilitate calculation, we generally choose the desired relative surge velocity as our control objective. The rationality is analyzed in Remark 2. For simplicity, we assume

Subsequently, by virtue of FLS to approximate the external model uncertainties
To solve the problem of input saturation, an auxiliary dynamic system is proposed as

where

where

The update laws of FLS are proposed as follows

where
Theorem 2. All of the errors of the USV path-following velocity control system are UUB with the control law (31) and the update law (32).
Proof. Assign the following LFC
When

In view of equation (32) and Lemma 3, we have

where
When

where
Synthesizing equations (34) and (35), we have

where

It follows that all of the error signals of the velocity tracking subsystem are UUB from Lemma 1, and the subsystem is stable. Without the assumption
Attitude tracking control
Define attitude tracking error

Similar to the last subsection, the auxiliary system is given by

where

where

where
Theorem 3. All of the tracking errors of the USV attitude control system are UUB with the control law (40) and the update law (41).
Proof. Considering the following LFC
When

Substituting equation (41) into (42) and using Lemma 3 yields

where
When

where

where

We can conclude that all of the error signals of the attitude tracking subsystem are UUB from Lemma 1, and the subsystem is stable.
Closed-loop system stability analysis
Theorem 4. Define the tracking errors All of the tracking errors and estimation errors of the closed-loop system are UUB, and the system is stable. The sway velocity is passively bounded.
Proof. For the closed-loop system of USV. 1. Assign the complete LFC

It follows that all the errors of the closed-loop system are UUB, thus, the USV path following system is stable. It is indicated that 2. For the sway velocity vr
, consider a Lyapunov function

where
Simulation studies
To illustrate the availability of the proposed path following scheme, some simulation studies are conducted in this section with USV, whose parameters can be found in the literature.
19
The look-ahead distance is defined as
Control parameters of USV simulation.

USV: unmanned surface vehicle.
The velocity

Results are depicted in Figures 4
to 14. Figures 4 and 5 show that the USV can follow the reference path, and the proposed EILOS scheme performs best because it converges to the reference path in minimal time. In addition, the PLOS and CLOS schemes exhibit obvious fluctuations in cross-tracking error, ye
, at the steady period. Figure 7 indicates that the unmeasured surge and sway velocities can be precisely and quickly extracted using the proposed ESO. Furthermore, it is reasonable to compare the relative USV resultant velocities as measurable states in the PLOS and CLOS schemes. If ocean currents are not compensated in the ELOS scheme, as shown in Figure 8, then obvious fluctuations exist in the velocity estimate errors. Attitude and surge velocity tracking errors are displayed in Figure 9, in which the SMC and backstepping methods can each cause

Path following performance.

(a) Cross- and (b) along-track errors.

The update law of path variable.

(a) The velocities and (b) their estimations.
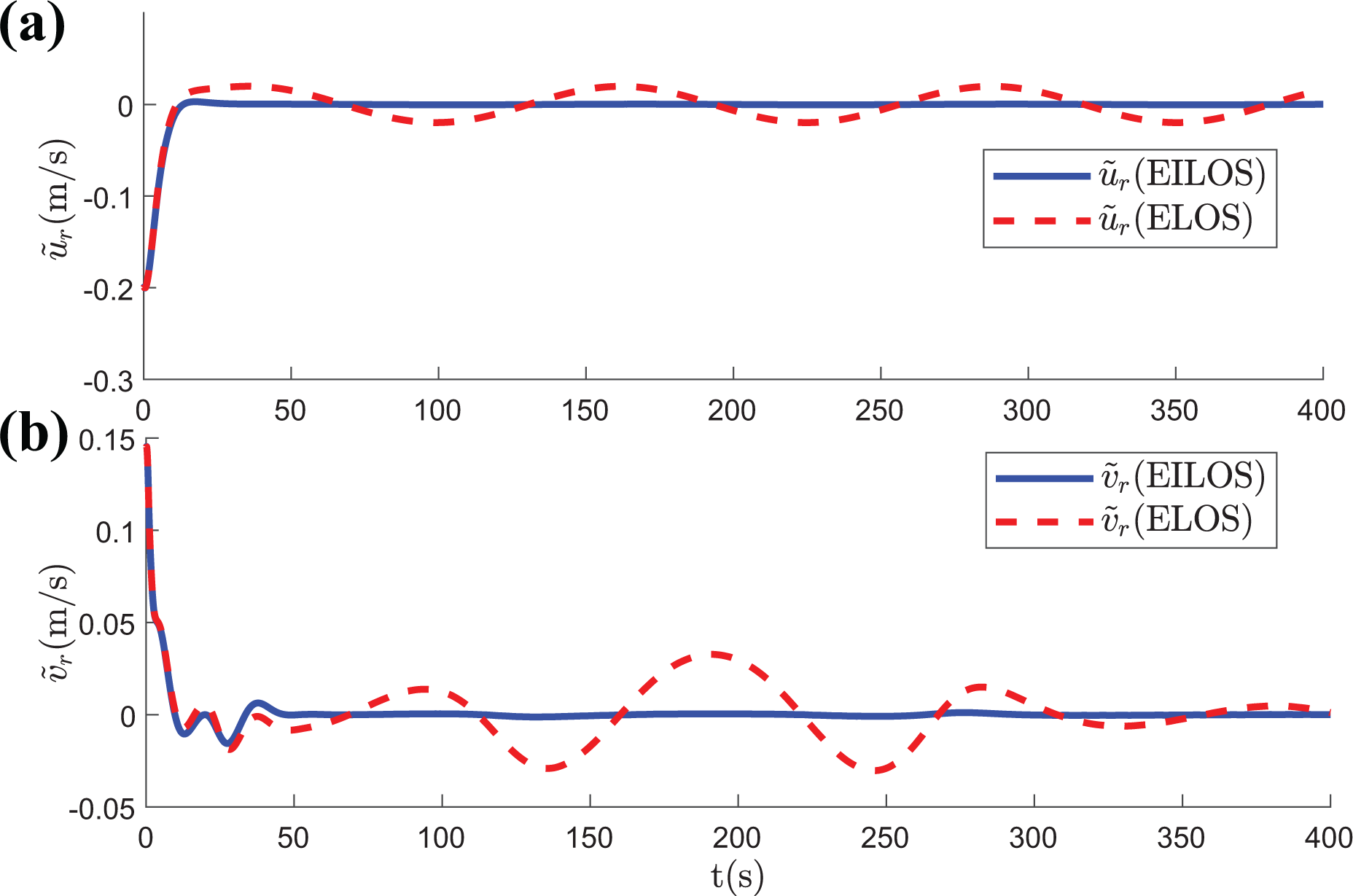
(a, b) The estimate errors of USV velocities. USV: unmanned surface vehicle.

(a, b) The attitude and surge velocity tracking errors.
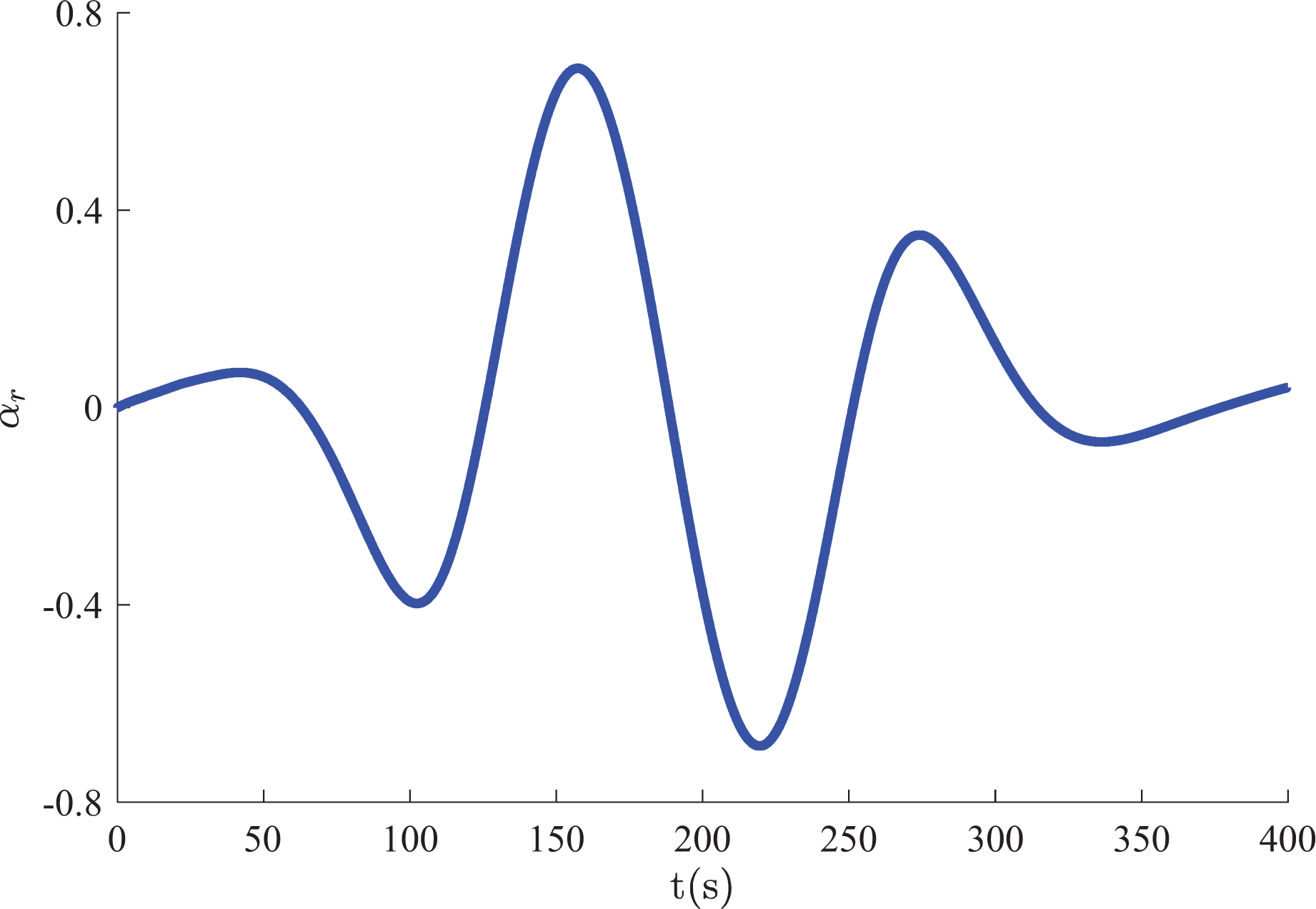
The performance of

Look-ahead distance.

(a, b) Ocean current parameters and their estimations.

(a, b) The approximation errors of unknown dynamics.

(a, b) The control inputs.
Conclusions
In this article, an ISMC is proposed based on a novel ESO, an ILOS guidance law, an auxiliary dynamic system, and the FLS. The salient features of the proposed algorithm are as follows. First, the unmeasured velocity can be precisely estimated by ESO. Second, the ILOS guidance law is able to provide the reference heading angle as well as estimating the ocean current velocities simultaneously. Third, the ISMC with FLS is able to force the state tracking errors converge to a neighborhood of zero. It is verified that the closed-loop system of the USV is UUB. The simulation results show the availability and superiority of the EIAFSM scheme.
Many problems warrant closer investigation, and some methods must be enhanced for USV path following (e.g. neglecting the hysteresis characteristic of the actuator and the lack of an accurate adaptive method for fast time-varying ocean currents). Therefore, disturbance observers are powerful tools that will be the focus of our subsequent work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by “the National Natural Science Foundation of China” [Grant numbers 51879027, 51579024, and 51809028] and “the Fundamental Research Funds for the Central Universities” [Grant numbers 3132019318 and 3132019109].