
Abstract
Formation control is one of the essential problems in multi-unmanned underwater vehicle (UUV) coordination. In this article, a practically oriented UUV formation control structure and method are proposed for the problem of large communication in leader–follower approach. To solve the problem of large communication in multi-UUVs, local sensing means of acoustic positioning is used to provide the real relative distance and angle information for the follower UUV. So, only a small amount of state information of the leader UUV needs to be sent to the follower UUV by acoustic communication. Then, the formation control structure in absence of follower position information is proposed. In this control structure, only the relative distance and angle, as well as velocity and heading of the leader UUV, are used for the formation controller design of the follower UUV. Backstepping and Lyapunov methods are used to design the formation controller without position information of the follower UUV. Two formation configurations of rectangle and triangle with five UUVs are simulated to verify the effectiveness of the method proposed. The simulation results show that the follower UUV can successfully constitute and maintain the desired formation by controlling each real relative distance and angle.
Introduction
As an unmanned, mobile, and low-cost underwater implementation, unmanned underwater vehicles (UUVs) are rapidly developed and employed in a variety of applications in ocean scientific research, marine engineering, and military affairs. Compared with a single UUV, multi-UUV system can improve work efficiency and complete complex tasks by cooperation, which is becoming a hot research field. Usually, multi-UUVs need to maintain a certain formation in the process of moving and task executing, which is called formation control problem. It can be described as a configuration of multi-UUVs in which the vehicles maintain a desired formation structure while moving as a whole and fulfilling assigned tasks. 1 Formation control problem is so important for multi-UUVs because of potentially broad applications in ocean engineering and science. 2 More and more formation control research have been carried out and some formation control approaches have been proposed. In general, there are mainly four formation control approaches for multiple vehicles and robots: virtual structure approach, 3 –5 behavior-based approach, 6,7 leader–follower approach, 8 –10 and artificial potential field approach. 11 –13 Each of the above approaches has its own advantages and disadvantages.
The basic idea of virtual structure approach is to treat the UUV formation as a virtual rigid body structure. 14 Each UUV occupies a fixed and unique position point on the virtual rigid body structure. Each UUV only needs to track its own position point to maintain the desired formation. The virtual structure approach is easy to describe the formation behaviors, which is profitable for formation keeping. However, the rigid structure constraint and large communication requirements limit its wide applications. Meanwhile, the robustness is not well guaranteed when the formation motion is time varying. 15 For behavior-based approach, the formation control task is decomposed into several basic behaviors. These basic behaviors may include cohesion, collision avoidance, obstacle avoidance, moving to goal, and so on. 16 Then, each UUV moves as a total behavior weighted of each basic behavior according to the formation control goal. Behavior-based approach is easy to realize distributed control and has strong adaptability to the environment. The disadvantage is that the whole behavior of the formation is difficult to design and formalize mathematically. 17 Two roles of leader UUV and follower UUVs are assigned for the leader–follower approach. The leader UUV tracks a predefined path and the follower UUVs maintain a desired formation with the leader UUV. 18,19 The follower UUVs keep formation based on information received from the leader UUV. 20 The basic idea is to transform the formation control problem into the problem that follower UUVs track the position and direction with respect to the leader UUV. Leader–follower approach is easy to understand and implement. However, the failure of the leader UUV can lead to the failure of the whole formation team. Once the leader UUV is invalid, all the follower UUVs will lose their formation performance. 21,22 For the artificial potential field approach, an abstract artificial potential field is constructed in the working environment of UUVs. Then, the corresponding gravitational potential field and repulsive potential field are used to control each UUV to form a specific formation structure. This approach is suitable for formation control in collision avoidance problem. However, the main disadvantage is that it is difficult for potential field function design. 23
Considering the advantages of simplicity and extensibility, leader–follower approach will be adopted and researched in this article. However, there are two main limitations when the traditional leader–follower approach is applied to UUV formation control in practice. For traditional leader–follower approach, the follower UUVs need to obtain its own position information in real time and obtain the position information of the leader UUV at the same time. Then, the follower UUVs calculate the relative distance and angle with respect to the leader UUV for formation control. In addition, most of the leader–follower approach is based on the first-order model to design formation controller for the follower UUVs. That is, the follower UUVs adopt position control to maintain the formation. Based on the above analysis, it can be known that the follower UUVs must equip high precision but expensive navigation equipment when using the traditional leader–follower approach, which increases the cost of the multi-UUV system. So, developing a leader–follower formation control method without follower position information is very beneficial to reduce the cost of multi-UUV system because the follower UUVs do not need to equip expensive navigation equipment. For traditional leader–follower approach, the position of the leader UUV is needed for the follower UUVs to calculate the relative distance and angle. Therefore, the information sent by the leader UUV to the follower UUVs through acoustic communication includes not only its own heading, linear velocity in surge, and angular velocity in yaw but also position information. As we all know, compared with other information, the communication quantity of position information is relatively large. However, the large communication quantity may easily cause the problem of packet dropouts due to the low data rate, long propagation delay, and instability of the acoustic communication.
24
Therefore, developing a leader–follower formation control method with low communication quantity is very meaningful for the practical application of UUV formation control based on acoustic communication.
Motivated by the above discussion, this article aims to develop a leader–follower formation control method of multi-UUVs that can reduce acoustic communication quantity and do not need position information of the follower UUV. The main contributions of this article are given below: A leader–follower formation control method of multi-UUVs in absence of follower position information is proposed. First, the follower UUVs do not need the position information of self and the leader UUV to calculate the relative distance and angle. Instead, the follower UUVs can obtain the relative distance and angle directly through acoustic positioning means. Second, the formation controller is designed based on the second-order model to control the heading and speed of the follower UUVs. Based on these two aspects, the follower UUVs do not need to obtain its own position information during formation control process. That is to say, there is no need to equip high precision but expensive navigation equipment for the follower UUVs, which can greatly reduce the cost of multi-UUV system. An efficient and practical acoustic local sensing information interaction means is designed for multi-UUV system. In the local sensing information interaction means, the method of combining acoustic communication with acoustic positioning is adopted. The leader UUV sends a small amount of information of its heading, linear velocity in surge, and angular velocity in yaw to follower UUVs by acoustic communication. Meanwhile, the follower UUVs obtain the relative distance and angle by acoustic positioning. By this, the position information with large communication quantity does not need to be sent by the leader UUV through acoustic communication. The reduced communication quantity is very suitable for low data rate, long propagation delay, and instability acoustic communication for formation control of multi-UUV system. Considering the practical feasibility and the current development of underwater acoustic engineering technology, the integrated communication and positioning equipment is proposed to be used for formation control of multi-UUV system to realize the above two objectives. Because the integrated communication and positioning equipment has the characteristics of dual function, high integration and low cost, it is very suitable for UUVs.
The remainder of the article is organized as follows: Problem statement for leader–follower formation control of multi-UUV system is presented in the second section. In the third section, models of single UUV and leader–follower relative motion are established. Next, the formation control structure and controller design are introduced in the fourth section. Simulation results are illustrated in the fifth section. Then, the rationality and limitation of simulation are analyzed. Conclusion is given in the last section.
Problem statement
The scenario considered in this article is shown in Figure 1. There is only a leader and some followers for a group of UUVs. The whole leader–follower UUVs need to maintain a fixed geometrical formation while navigating to mission waypoints. 25 The leader UUV has high precision underwater navigation ability to obtain complete position information. However, the follower UUVs do not equip navigation instrument in absence of position information. In the leader–follower formation, the leader UUV guides and navigates the whole formation to all mission waypoints. Each follower UUV is responsible for generating a suitable actuation signal to track the leader UUV with a desired relative distance and relative angle for the formation maintenance. The introduction of the relative distance and relative angle between the follower UUV and leader UUV will be introduced in the third section.
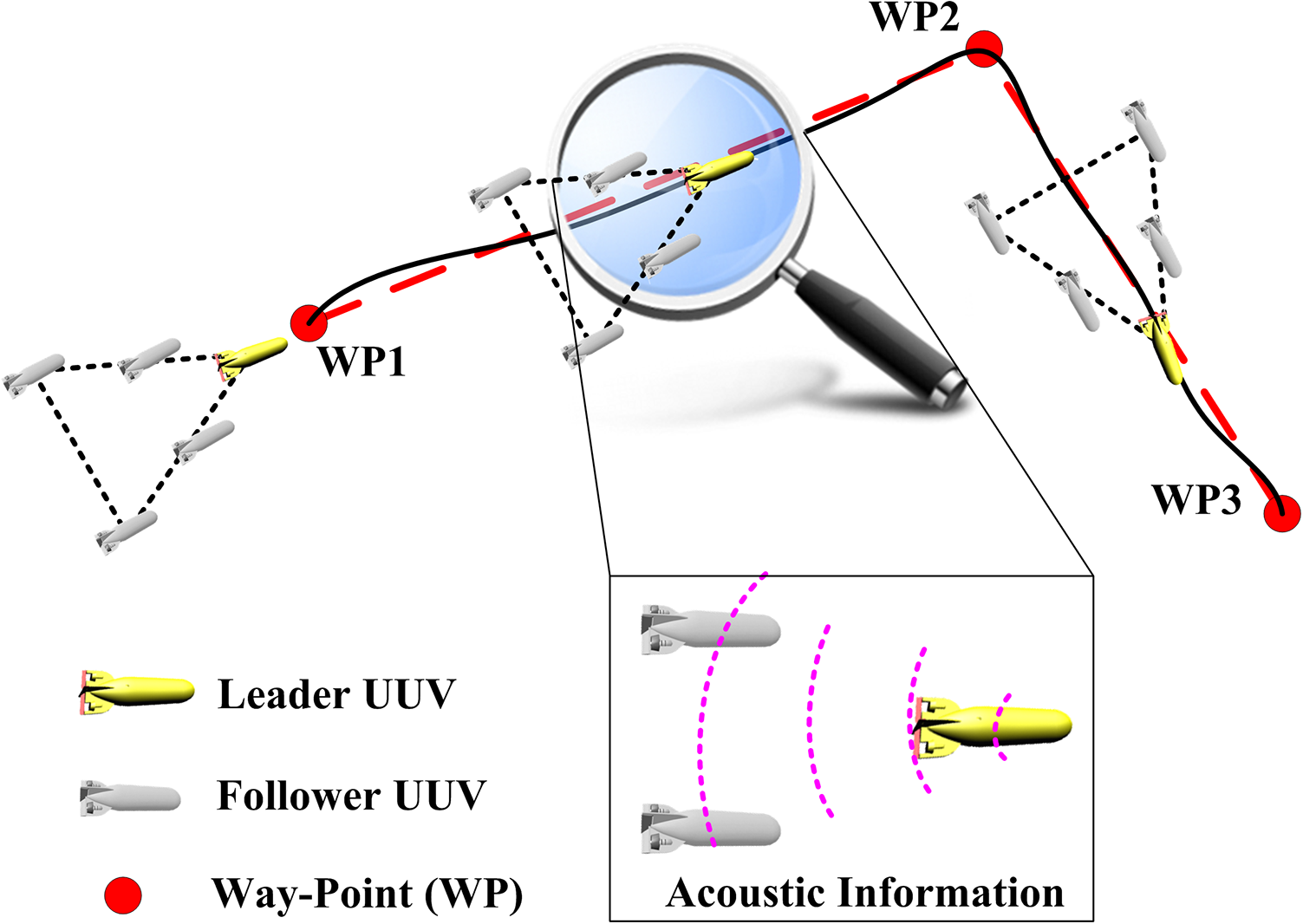
Problem statement of leader–follower formation of UUVs. UUV: unmanned underwater vehicle.
To keep formation, information interaction using acoustic means is necessary in the multi-UUV system, such as acoustic communication and acoustic positioning. For the purpose of reducing communication quantity, a local sensing means combined with acoustic communication and acoustic positioning is adopted in this article. All the follower UUVs can obtain the real relative distance and relative angle with respect to the leader UUV by local acoustic positioning. In addition, all the follower UUVs can also obtain a small amount of state information of the leader UUV by acoustic communication. In this way, the information needed for formation control of the follower UUVs is shared by acoustic positioning and acoustic communication means, respectively. So, the communication quantity in the multi-UUV system is reduced, which can reduce packet dropouts.
The acoustic information interaction between multi-UUVs proposed in this article has two features: The acoustic communication is unidirectional, only from the leader UUV to the follower UUVs as a timing broadcast form. In normal formation control process, each follower UUV does not need active communication to leader UUV or other follower UUVs. By this, the timing-unidirectional-broadcast communication of leader UUV greatly reduces the amount and frequency of information interaction between multi-UUVs and is very suitable for UUV formation control based on underwater acoustic communication. In practical applications, each follower UUV will communicate actively only in case of emergency to inform the leader UUV. However, the emergency active communication of follower UUVs is not the focus of this article. So, active communication of follower UUVs will not be mentioned here. The function of underwater acoustic positioning is realized synchronously at the same time of underwater acoustic communication. In practical underwater acoustic engineering, the integrated communication and positioning equipment can realize this function.
The integrated communication and positioning equipment is a kind of underwater acoustic equipment with communication and positioning functions. Usually, it adds the acoustic communication function to the acoustic positioning system, which can realize the acoustic positioning and acoustic communication at the same time. The integrated communication and positioning equipment is not only a simple superposition of positioning and communication functions but also an organic combination and complement of acoustic positioning technology and acoustic communication technology. Using the integrated communication and positioning equipment, the leader UUV can periodically send positioning signal with a small amount of communication information to all the follower UUVs as a broadcast form. Then, each follower UUV can receive the communication information and calculate the relative distance and relative angle with respect to the leader UUV through the positioning signal. However, this article does not describe how it is actually realized in detail here. Only the flow of the information interaction from leader UUV to follower UUVs is presented.
Some assumptions are made for the development of a control scheme suitable for achieving the above requirements.
Assumption 1. There is no obstacle in the working space, and the information of the mission waypoints and desired path is known only to the leader UUV.
Assumption 2. There is a delay of the information between the leader UUV and the follower UUVs. Because the processing delay and propagating delay are necessary for underwater acoustic communication and positioning. The delay time of the underwater acoustic information is usually 3–8 s.
Assumption 3. The position information for the follower UUVs is unknown.
Remark 1. Assumption 3 means that the proposed approach does not require the position information to design the formation controller of follower UUVs. In this article, the relative distance and angle information by local acoustic positioning means will be used.
Remark 2. A classic waypoints following control method is adopted for the leader UUV to guide and navigate the whole formation to all mission waypoints. So, waypoints following control method will not be introduced in this article.
Modeling of leader–follower unmanned underwater vehicles
In this section, the simplified kinematics of UUV is introduced, and the leader–follower relative motion model of multi-UUVs is formulated.
Simplified kinematics of unmanned underwater vehicles
To describe the kinematics of UUV, two reference frames are defined first. They are the Earth reference frame
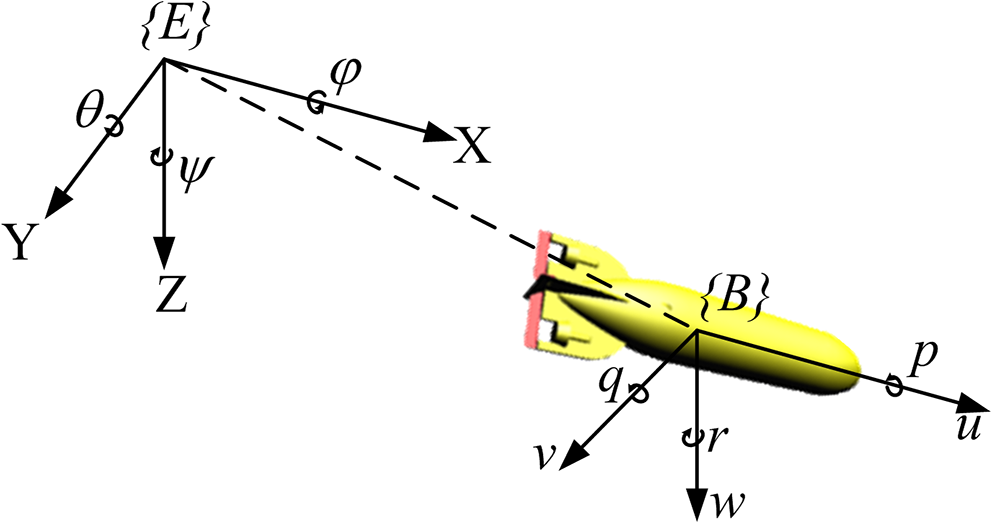
The Earth reference frame and body-fixed frame.
In this article, the UUV formation is only considered in horizon plane with constant depth. Without loss of generality, the motions in heave, roll, and pitch are neglected. Meanwhile, it is assumed that the leader UUV and the follower UUVs have same kinematics. Then, the simplified kinematics of the UUV is described as follows 26,27

where
Leader–follower relative motion model
For leader–follower formation control approach, there are different types of leader–follower relative motion systems. The method used in this article is an “

The leader–follower relative motion.
For the convenience of analysis and controller design, the linear velocity in sway is neglected here. So, based on equation (1), the simplified kinematics of the leader UUV can be defined as

The simplified kinematics of the follower UUV can be defined as

In equation (2) and equation (3),
Then, the leader–follower relative motion model expressed with

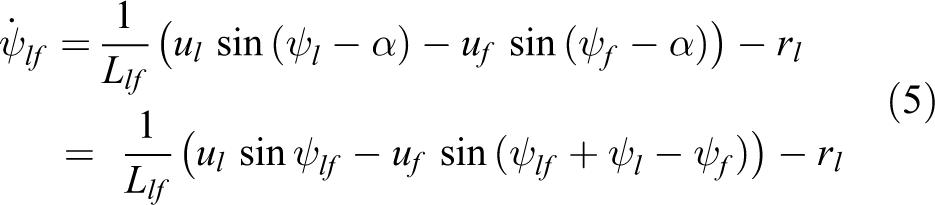
Remark 3. However, only a leader UUV and a follower UUV are shown in Figure 3. Extending to formation problem of a group of three UUVs or more, the model is also applied and studied.
Assumption 4. The system states ul
,
Assumption 5. The leader UUV and the follower UUV can move forward and stop, that is,
Formation controller design
In this section, a formation control structure in absence of position information of the follower UUVs is proposed based on local sensing means mentioned above. Then, the formation controller is designed using backstepping and Lyapunov methods for the follower UUVs.
Formation control structure
The formation control structure designed in this article is shown in Figure 4. Because the leader UUV is responsible for guiding and navigating to mission waypoints, the formation control design is mainly applied to the follower UUV. According to the principle of leader–follower formation control, as long as the desired relative distance and angle between the follower UUV and the leader UUV are set, the desired position and angle of follower UUV are also uniquely determined. So, for the follower UUV, the control reference inputs are the desired relative distance LD
and angle

The formation control structure of leader–follower UUVs. UUV: unmanned underwater vehicle.
In Figure 4, it can also be found that the formation controller does not require the position information of the follower UUV. Because the local sensing means is adopted in this article, the information of relative distance
Controller design
In this section, the formation controller of the follower UUV in absence of position information is designed. First, the leader–follower formation control error model is established based on the desired relative distance LD
and desired relative angle

According to geometric relationship shown in Figure 3 and let

Then, let

According to the leader–follower relative motion model described in the third section, equation (9) is further obtained

So, the final error model is

To obtain stable formation control to keep the desired relative distance and angle, backstepping and Lyapunov methods are used to design the formation controller. From equation (10), it can be found that the error model is not only dependent on the real relative distance
Consider the Lyapunov function candidate as follows

where k
1 is the control parameter and
It can be clearly seen from the above Lyapunov function that
The derivative of V can be described as

Substituting equation (8) into equation (12), we obtain

Substituting

The designed control law of uf is

where k
2 is control parameter and
Substituting equation (15) into equation (14), we obtain

The designed control law of rf is

where k
3 is control parameter,
Substituting equation (17) into equation (16), we obtain

Simplify and obtain

It can be found that

where

In equation (21),
Finally, the control law is

It should be noted that equation (22) gives the
Simulation results
In this section, the simulation results of formation control are presented to demonstrate the performance of the proposed control structure and method. There are five UUVs for simulation: one leader and four followers. Meanwhile, two configurations of rectangle and triangle are designed for the leader–follower formation. In addition, different communication delays are set in the two formation configurations to verify the effect when suffering information delays from the leader UUV to the follower UUVs.
For rectangle formation simulation, the initial information of positions
Initial information, desired relative distance and angle for rectangle formation.

UUV: unmanned underwater vehicle.

The trajectories of the leader UUV and follower UUVs for rectangle formation. UUV: unmanned underwater vehicle.
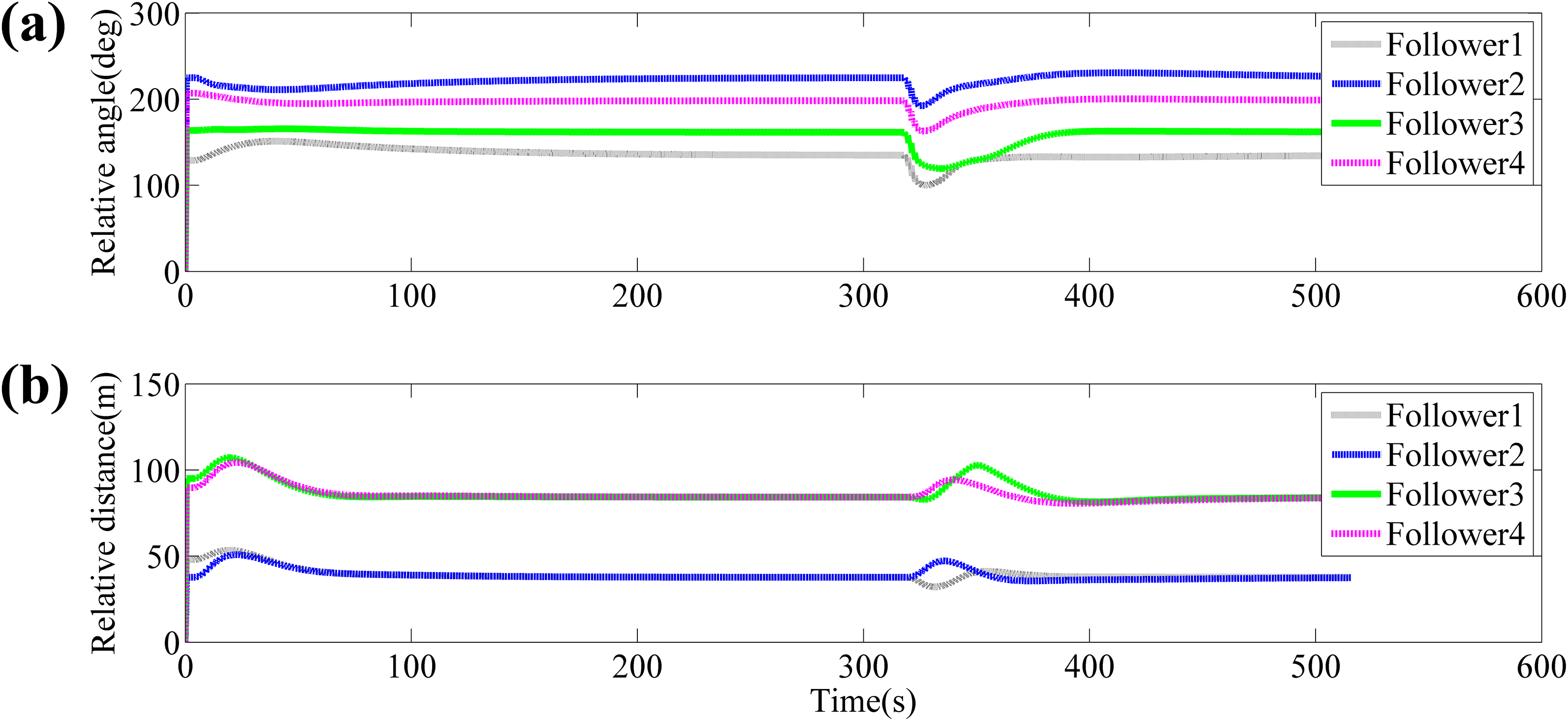
(a) The relative angles and (b) relative distances of the follower UUVs for rectangle formation. UUV: unmanned underwater vehicle.

(a) The heading angles and (b) velocities of the leader UUV and follower UUVs for rectangle formation. UUV: unmanned underwater vehicle.
From Figure 5, it can be found that the leader UUV is responsible for navigating to waypoints and all follower UUVs maintain desired relative distances LD
and desired relative angles
From Figure 6, it can be found that the follower UUVs well maintain the desired relative distance and angle and track the velocity and heading of the leader UUV. However, when the leader UUV makes a turn, the real relative distance and angle of the follower UUVs are deflected with the desired value, which made the maintenance effect of the formation a little poor. This is because when the leader UUV turns, its heading angle and angular velocity in yaw change greatly, which increase the control difficulty of the follower UUVs. It also can be analyzed by the final control law of equation (22). The control commands of linear velocity in surge and angular velocity in yaw of the follower UUVs are affected by the rl
of the leader UUV. When the leader UUV turns, the large change of rl
results in the fluctuation of the
For triangle formation simulation, the initial information of positions
Initial information, desired relative distance and angle for triangle formation.

UUV: unmanned underwater vehicle.

The trajectories of the leader UUV and follower UUVs for triangle formation. UUV: unmanned underwater vehicle.

(a) The relative angles and (b) relative distances of the follower UUVs for triangle formation. UUV: unmanned underwater vehicle.

(a) The heading angles and (b) velocities of the leader UUV and follower UUVs for triangle formation. UUV: unmanned underwater vehicle.
Analysis on rationality and limitation of simulation
First, through the analysis of four aspects, the rationality of the simulation in the article is explained. The formation control structure shown in Figure 4 is designed according to the method proposed in this article, considering the feasibility of engineering implementation. The simulation system is strictly constructed based on the control structure, including the leader and follower UUV model, actuator model, controller, underwater acoustic communication model, underwater acoustic positioning model, and so on. Therefore, it is reasonable to use the simulation system to verify the designed formation control structure and control method. To conform to the actual situation, not only the kinematics model of UUV but also the dynamics model of UUV are established in simulation. In addition, the settings of sampling time and control period are consistent with the actual UUV system. In simulation, the stated information obtained by the leader UUV and the follower UUVs and the acoustic interaction information sent by the leader UUV to follower UUVs is designed according to the actual situation. The specific design is as follows: the leader UUV can obtain its own position, heading angle, and linear and angular velocities. For follower UUVs, only their own heading angles, and linear and angular velocities can be obtained. For follower UUVs, the relative distance and angle with respect to the leader UUV, as well as the heading angle, and the linear and angular velocities of the leader UUV can be obtained through acoustic communication and acoustic positioning. In simulation, the delay of underwater acoustic information interaction is set and simulated according to the actual characteristics of information processing and propagation in underwater acoustic communication and positioning.
However, the simulation has the following two limitations: In simulation, the kinematics and dynamics model of UUV are appropriately simplified. The simplification is beneficial to the analysis of the problem and the design of formation controller but will cause the motion response of single UUV to be inconsistent with the actual situation. However, because all UUV models are simplified in the same way, it will not affect the effect of the whole formation, nor affect the verification for the formation control method proposed. In simulation, there is no ocean environment model, mainly the ocean current model. Therefore, there is no ocean current interference in the simulation results of formation control. In fact, formation control under ocean current interference is an important and special research problem of UUV formation control. And, some solutions have been proposed in related research. However, the focus of this article is not on the ocean current interference.
Conclusion
This article researches the problems of reducing the communication quantity and not using position information of the follower UUVs in the leader–follower UUV formation control approach. So, local sensing means is proposed for the multi-UUVs to solve the above problems. Then, the information needed for the follower UUVs to track the leader UUV can be obtained both by acoustic positioning and acoustic communication. The acoustic positioning provides the relative distance and relative angle to the follower UUVs. The acoustic communication only provides a small amount of information, including linear velocity in surge, heading angle, and angular velocity in yaw of the leader UUV to the follower UUVs. Then, the formation control structure in absence of follower position information is proposed and the formation controller is designed. The effectiveness of the method is simulated by two formation configurations of rectangle and triangle with five UUVs. The simulation results show that the proposed control structure and controller are effective for the leader–follower UUV formation control. Under the condition of random position place, the follower UUVs can successfully constitute and maintain the desired formation by controlling the real relative distance and angle. Also, there are two information delays set in the simulations. The simulation results show that the method can be well applied to relatively large information delays for UUV formation control using acoustic communication. However, the formation control structure and method proposed in this article have specific application area which is that the multi-UUVs need to adopt integrated acoustic communication and positioning means for information interaction.
Footnotes
Acknowledgments
The authors would like to thank all the editors and anonymous reviewers for improving this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Nature Science Foundation of China under grant no. 51809060, 51679057, and 51609048 and by the Natural Science Foundation of Heilongjiang Province of China under grant no. E2017014.