
Abstract
The formation control problem for multi-agent systems has been explored in recent years. However, controlling a formation of multiple aerial vehicles in the presence of disturbances has been a challenge for control researchers. To deal with this issue, a robust adaptive formation control algorithm for a group of multiple quadcopters is proposed. A nonlinear model of the dynamics of the formation error is obtained based on a leader–follower scheme. This model considers both the relative position in the x–y plane and the relative heading angle between vehicles in the presence of uncertainties. In addition, by means of a model reference control approach, a robust adaptive formation controller is used to steer the vehicles into a formation pattern and have them maintain the formation shape. Numerical simulations demonstrate the effectiveness of the algorithm.
Introduction
In recent years, the problem of formation control of quadcopters has attracted a great deal of attention in the aerial vehicle control field. 1 –6 Quadcopters have many advantages such as high manoeuvrability and reliability, economic cost, and small size. The copters can be used for several complex tasks that include search and rescue operations, risk and/or hidden zone inspection, 2 –4 aerial mapping, and military applications. 5 –7 Compared with a single quadcopter, a formation of quadcopters increases space for equipping sensors, provides higher payload capacity and larger surveillance coverage, and, as a result, can achieve more difficult tasks in a more efficient manner. 8 –11 However, controlling a formation of multiple quadcopters is posing several difficulties for researchers because of either lacking of explicit mathematic formation dynamics models or the influences of external perturbations. Overcoming these shortcomings is becoming an imperative topic as it promises a broad range of quadcopter application to be developed afterward.
Related works
Several papers relating to the quadcopter formation control problem have been published. Abbas and Wu 11 proposed a leader–follower formation control scheme using two controllers. One is a proportional derivative controller used to keep the formation shape, and the other, based on fuzzy logic, is used to achieve the formation pattern. Simulations demonstrated the effectiveness of this algorithm in an environment without uncertainty. In the work of Hua et al., 12 another leader–follower formation control scheme was proposed for a group of quadcopters. The authors of this approach used a prescribed performance control method to obtain both the formation pattern and formation trajectory. Another approach was proposed Wua et al., 13 employing a proportional-integral-derivative (PID) controller and a sliding mode controller (SMC). The authors solved the formation control problem of a team of quadcopters in a simulation environment without including disturbances or communication delays. In the studies by Khaled and Youmin, 14 Mu et al., 15 and Mercado et al., 16 the SMC method was also used to solve the leader–follower formation flight problem of multiple autonomous vehicles. This method can provide fast responses of the system. However, a main disadvantage of this method is the chattering phenomenon of control input which can cause the follower to twitch and decrease the lifetime of the entire system.
The leader–follower scheme was also applied in the approaches presented in the study by Abas et al. 17 for solving the circular motion problem of quadcopter formation. An approach presented in the study by Li and Liu 18 described a synchronized position tracking controller based on a proportional-integral (PI) control law for two unmanned aerial vehicles (UAVs). By synchronizing the agents’ positions, the controller preserves the formation shape. In the work of Abdessameud et al., 19 a distributed control algorithm was obtained to solve the problem of communication delays in a leader–follower formation. In the work of Turpin et al., 20 another nonlinear distributed controller for an aggressive formation of micro-quadcopters was presented. Bayezit and Fidan 21 proposed a distributed cohesive motion control algorithm for maintaining the three dimensional (3D) formation geometry of autonomous vehicles, whereas in the study by Lee 22 and Zhao and Go, 23 the authors utilized a back-stepping technique to obtain a distributed control scheme for the quadcopter formation control problem. In the work of Estevez and Grana, 24 a model reference adaptive control algorithm was proposed for a team of three quadcopters. By online tuning the controller gains, this algorithm allows the system to adapt to unexpected perturbations. However, this approach focuses on only wind disturbances while general disturbances were not addressed.
The references indicate several studies have discussed the flight formation of multiple UAVs in theory, simulation, and flight tests. In addition, the leader–follower approach appears in the literature as the most common method used for the formation of flight control of multicopters. Most of the previous studies are only capable of solving the formation control problem without considering the presence of uncertainties, with only very few being robust against perturbations.
Main contributions
In this article, we propose a robust adaptive formation control (RAFC) for quadcopters based on a leader–follower scheme. A nonlinear model of the formation error is obtained based on a leader–follower scheme. This model considers both the relative position in the x–y plane and the relative heading angle between the vehicles in the presence of uncertainties. In addition, using a model reference control approach, a RAFC is applied to drive the vehicles to achieve the formation pattern and maintain the formation shape. Unlike the quadcopter formation control algorithms in some previous studies,
23,25,26
which utilized model predictive control or
Organization
The remainder of this article is organized as follows. The second section describes some preliminaries and the problem statement. The third section presents the proposed RAFC algorithm. Numerical simulation results are given in the fourth section, which is followed by conclusions.
Preliminaries and problem statement
Assume that there are n quadcopters in the considered system. Compared with the attitude dynamics, the trajectory dynamics of each quadcopter have much larger time constants, which allows the overall controller can be decoupled into inner-loop and outer-loop corresponding to the quadcopter dynamics and the formation error dynamics, respectively.
23,27,28
In this section, we briefly present the quadcopter dynamics model, the formation error dynamics model, the control objective, and the multi-loop controller’s scheme.
Notation 1: Let
Quadcopter dynamics model
The quadcopter dynamics model was proposed and demonstrated in many previous studies. 29 –33 In this subsection, the dynamics model of the quadcopter is briefly described as follows

where uz
is the total lift applied to the quadcopter in the z direction in the body-fixed frame.
The thrust Fi
generated by each motor always points upward, parallel to the motor’s rotation axis. When operating, each motor produces a torque


Quadcopter configuration.
Formation error dynamics model
As mentioned above, since the trajectory dynamics of each agent is slower than the attitude dynamics, the formation error dynamics model, which is directly obtained from the trajectory information, can be examined separately from the quadcopter dynamics model. 23,27,28 Before moving forward, the following notations are introduced.
Notation 2: Let

Leader–follower configuration.
The actual distance along the leader’s body-fixed x and y axes is calculated as follows 16

Here, it is worth noting that the values of
A conventional dynamics model of the formation error was obtained and verified by Wua et al. 13 and Mercado et al. 16 based on geometric analysis. In this subsection, we briefly present the nonlinear formation error dynamics model in the presence of uncertainties

where
The above formation error dynamics model can be rewritten in matrix form as

where



Control objective
This article focuses on designing a RAFC law for a group of quadcopters against uncertainties to achieve: The desired formation pattern which is defined through the relative distances between the agents and their orientation, that is, The desired formation trajectory.
In other words, the control law should cause the formation error to asymptotically converge to zero

Control scheme
The overall control scheme implemented for each quadcopter consists of an outer-loop in which the RAFC operates and an inner-loop where the velocity and attitude controllers run (Figure 3). Outputs of the outer-loop, including desired horizontal velocity and heading angular rate, thus become inputs of the inner-loop. By employing two PID controllers, the inner-loop controls the velocity and attitude of the vehicle and generates control signals

Block diagram of the proposed algorithm.
Before moving on, the following lemma is introduced, which can be found in many text books (see [34]).
Lemma 1: For any vectors
Robust adaptive formation controller
The dynamics model in expression (5) can be rewritten as follows

where
The formation error ei should track the state of the following reference model 1,34

where
It is easy to prove that

where
In the presence of uncertainties, the control objective in expression (7) can be achieved by applying the following formation control law

where K 1, K 2, and L are the estimates of the unknown controller gains to be generated by the following adaptive laws

where

Theorem 1: If the control law is designed as expression (11) with the adaptive gains as expression (12), then the system (8) is stable and the formation errors are forced to zero.
Proof:
According to the definition of
Substituting for

with the consideration of

Let

Substituting for

Expression (17) implies that the error

Considering the candidate Lyapunov function
where P is positive definite and

Using the property of trace in Lemma 1 to manipulate expression (20) yields
Choosing the law to generate the controller gains as in expression (12), we have

which means that the controller gains are bounded and that
Remark 1: The control law in expression (11) is robust adaptive as the controller gains are estimated directly from the error with respect to time in the presence of uncertainties.
Remark 2: The proposed formation control algorithm is distributed as the controller is implemented separately on each vehicle and only receives information from its direct neighbours and itself.
Numerical simulation results and discussion
In this section, we demonstrate the effectiveness of the proposed RAFC algorithm. The quadcopter dynamics (expression (1)) and the formation error dynamics (expression (5)) are used to verify the stability and robustness of the proposed controller. The advantages of our algorithm are discussed and highlighted by comparing with some previous studies, such as non-adaptive model reference formation control (normal MRFC) and sliding mode formation control (SMFC).
Simulation assumptions
Consider the RAFC of a group of three agents. The communication topology among the agents (Figure 4) is as follows: the first follower has direct access to the information of the virtual leader whereas the second follower only has access to the information of the first follower.

Communication topology and desired formation pattern.
The desired formation trajectory is generated by the virtual leader as the following two-dimensional curve:
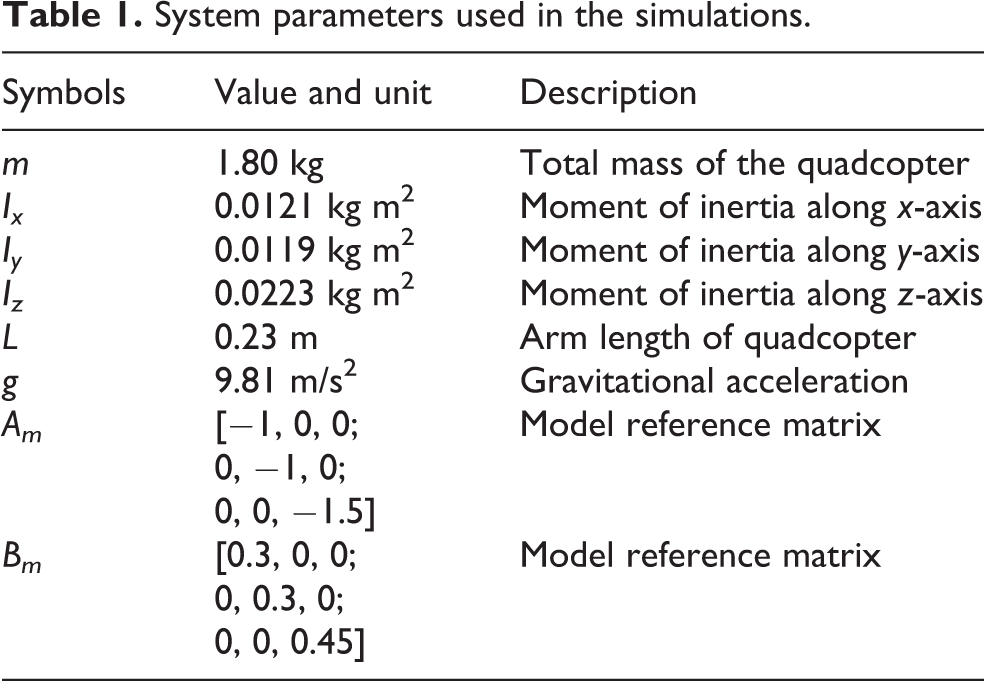
The simulation was conducted based on several assumptions: (1) the attitude of each quadcopter is measured by an inertial navigation system (INS), and the position of the vehicle is determined by the fusion of a global positioning system receiver module and the INS and (2) the uncertainties simultaneously affect all terms of the formation error dynamics of the first quadcopter. Candidate functions of the uncertainties are introduced into the simulations as following expression (24). In practise, these uncertainties may stem from the failure of communication between agents, wind, and/or surrounding magnetic sources that typically act at low frequencies. The remaining system’s parameters used for the numerical simulations are listed in Table 1

System parameters used in the simulations.
Simulation results
To clearly present the improved performance of our proposed method, the simulations were carried out with two stages: (1) formation control in the absence of uncertainties and (2) formation control in the presence of uncertainties.
Stage 1: Formation control of the quadcopters in the absence of external uncertainties.
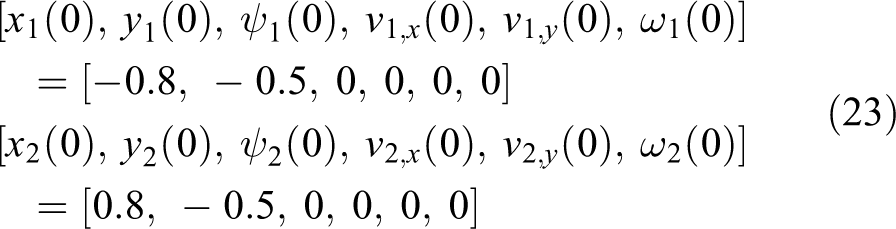
For the first 20 s of the experiment we assume that no uncertainty is impacting the formation dynamics and expect our algorithm to perform as well as previously published methods. The quadcopters start performing the formation flight from different initial states as in expression (23).
The results from stage 1 (Figures 5 to 13) illustrate that the proposed controller is capable of driving all following quadcopters to converge to the desired formation pattern after about 5 s and then move along the formation trajectory. Figures 5 and 6 show the position performance of the controllers. It can be seen that all of the controllers are able to control the quadcopters to generally achieve the formation pattern and then maintain the formation shape. To examine these performances, closer views are presented in Figures 7 to 13. Through looking at the position errors as shown in Figures 7 and 8, we know that the position performances are nearly equal among the three types of controller. It is seen that, however, there are some small steady state errors which can be reduced by fine-tuning the inner-loop controller’s PID gains. It is worth noting that this fine-tuning procedure will not be discussed here because it is beyond the scope of this study. The convergences of the velocity and attitude of each quadcopter (Figures 9 to 13) indicate the stability of both the controllers and the entire system.

Position along the x-axis of all quadcopters.

Position along the y-axis of all quadcopters.

Zoom of position errors along the x-axis in stage 1.

Zoom of position errors along the y-axis in stage 1.

Velocities along the x-axis in stage 1.

Velocities along the y-axis in stage 1.

The roll angles in stage 1.

The pitch angles in stage 1.
The yaw angles in stage 1.
The outer-loop controller’s parameters were tuned such that the position, velocity, and attitude performance of the three types of controller are nearly equal during this disturbance-free stage. As a consequence, once uncertainty starts to act, the value of our robust adaptive controller should emerge.
Stage 2: Formation control of the quadcopters in the presence of external uncertainties.
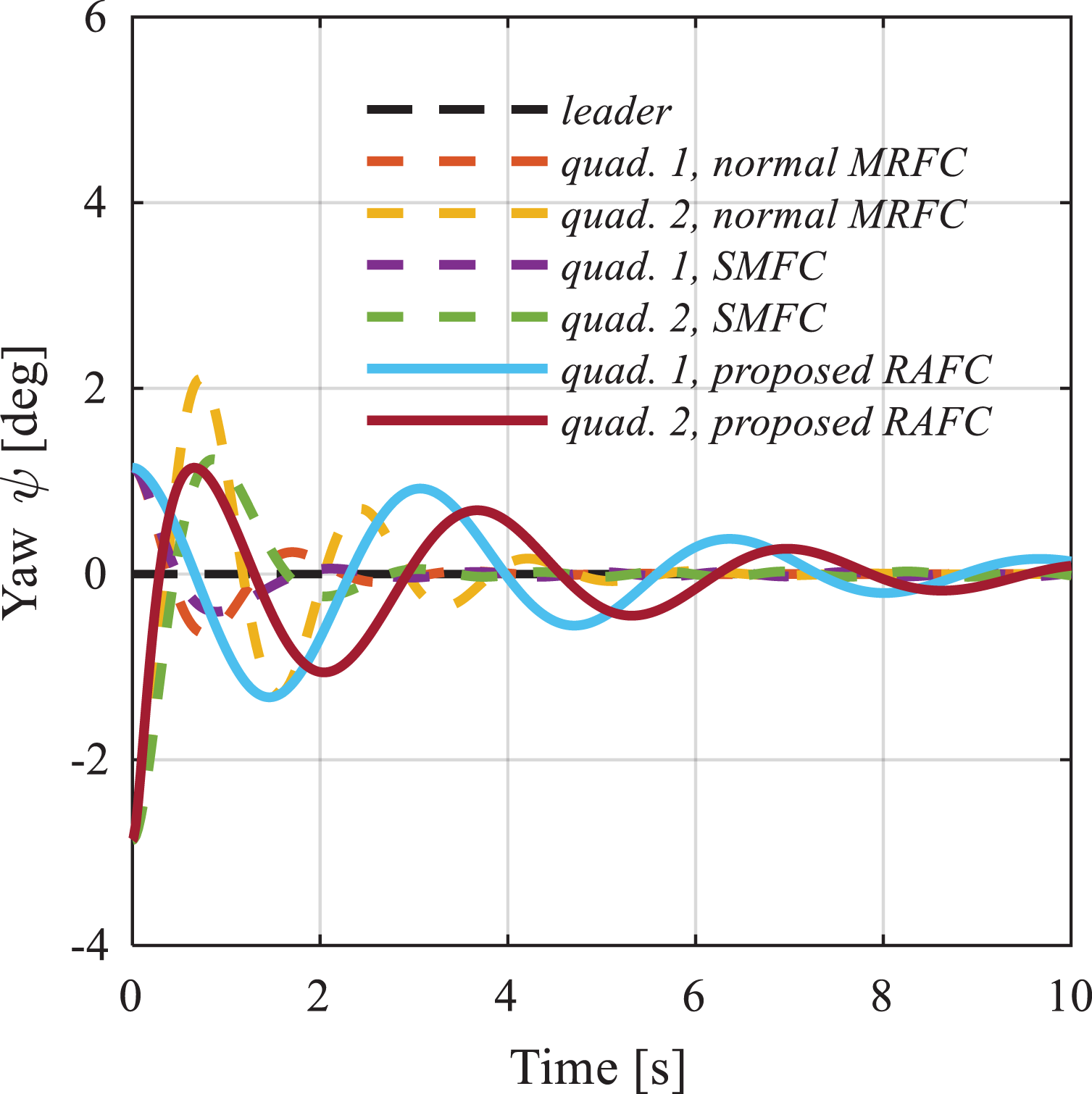
This stage covers the time period t ≥20 s, during which external uncertainties (expression (24)) are applied to the formation error dynamics of the quadcopter 1 (see Figure 4). Under the influence of perturbations, the vehicles’ yaw angles and positions are disrupted and deviations from the tracking formation trajectory or formation shape become apparent. Looking at the simulation results for stage 2 (Figures 14 to 20), it is clear that our algorithm exhibits a significantly superior performance compared to the other approaches. Also, our controller is not only capable of maintaining velocity tracking but also stabilizes the attitude of the vehicles (Figures 17 to 20).

The yaw angles in stage 2.

Position error along the x-axis in stage 2.

Position error along the y-axis in stage 2.

The velocities along x-axis in stage 2.
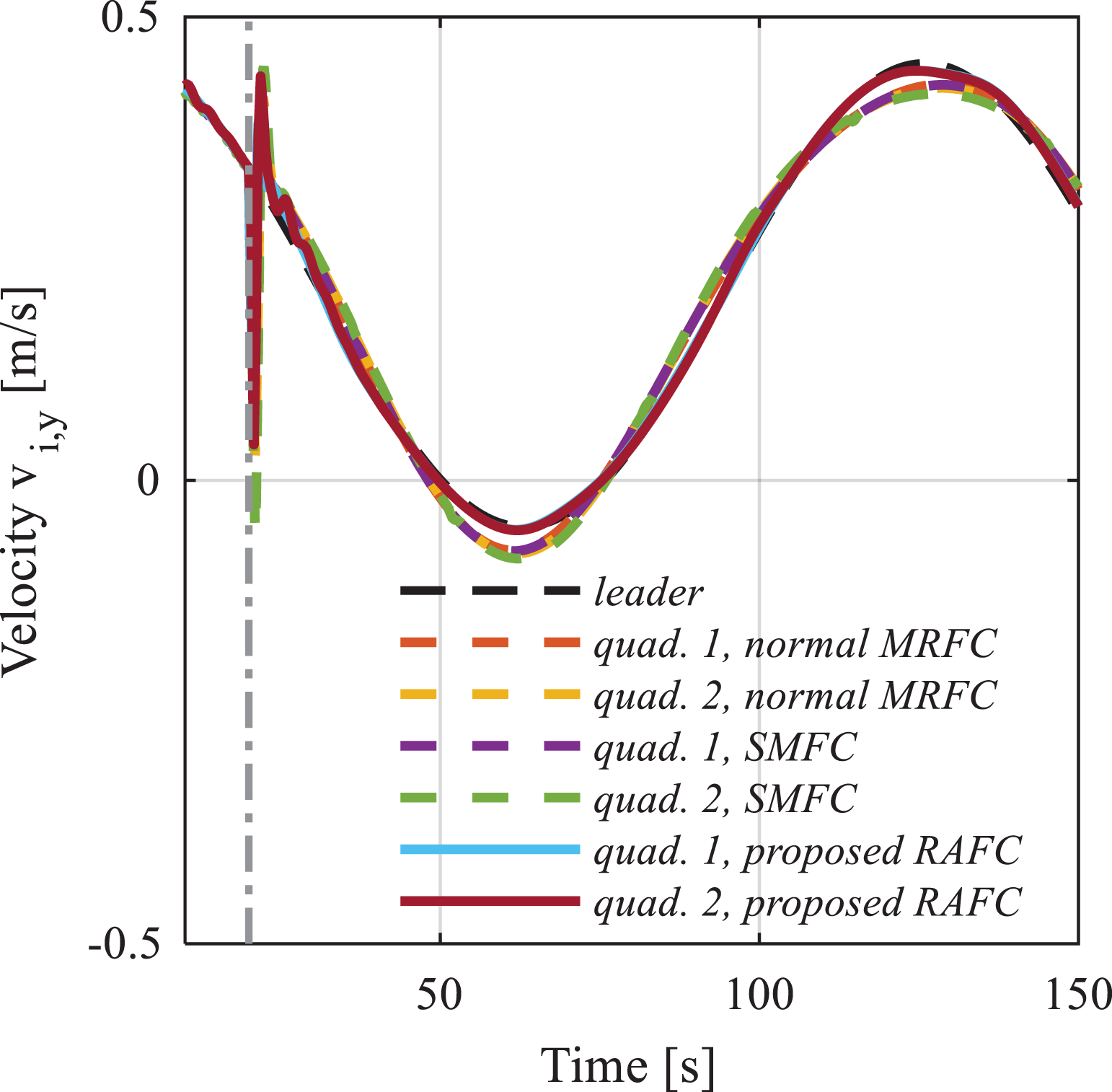
The velocities along x-axis in stage 2.

The roll angles in stage 2.
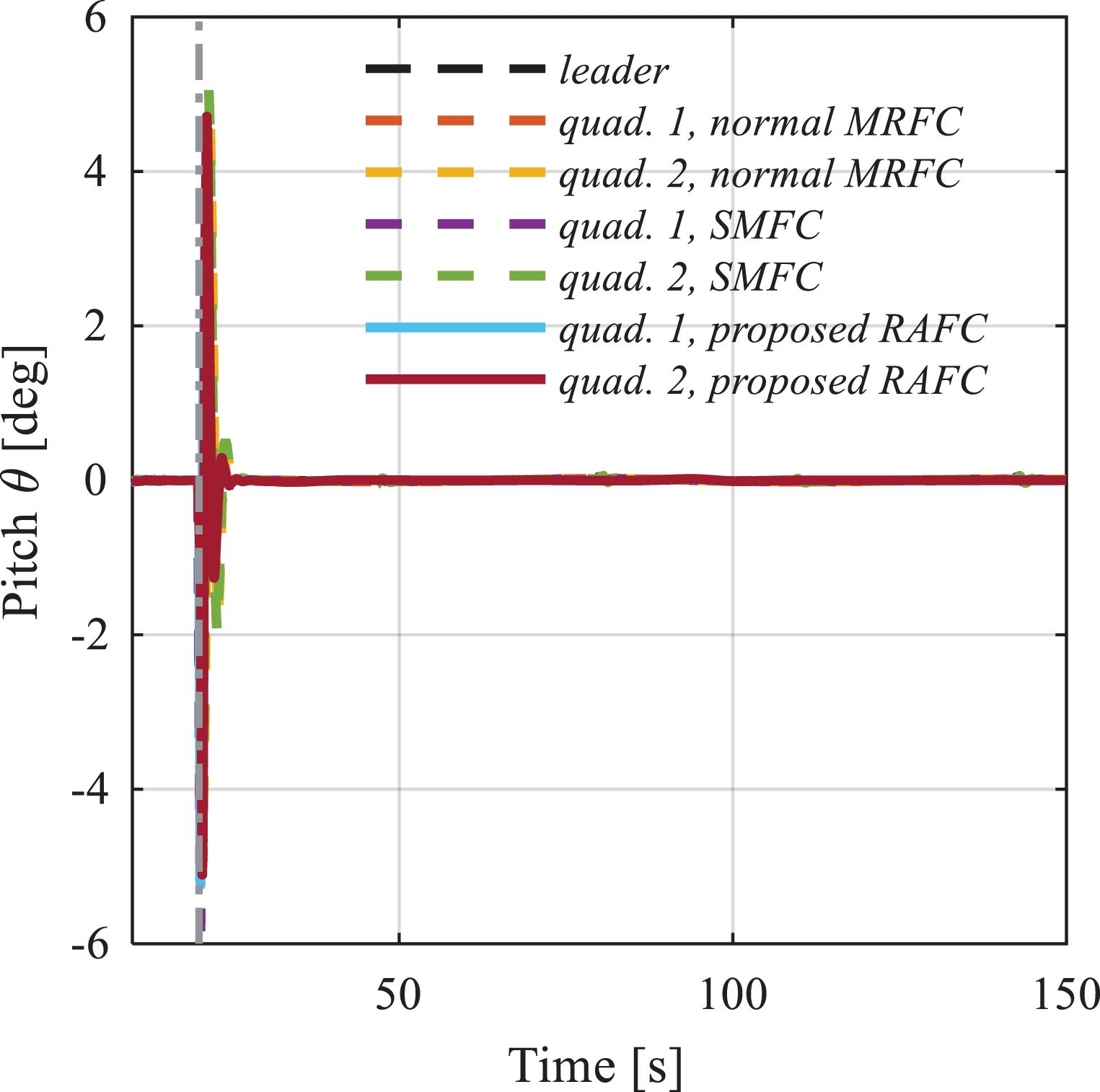
The pitch angles in stage 2.
As per Table 2, the position and heading performance of the MRFC and SMFC exhibit large peak-to-peak amplitudes of oscillation. For the MRFC, it reaches about 0.6 m for x-position, 0.7 m for y-position, and 4° for heading angle. For the SMFC, it reaches about 0.65 m for x-position, 0.8 m for y-position, and 8° for heading angle. In addition, if we look at Figures 17 and 18, it is seen that the velocity performances of these two controllers also oscillate at significantly larger amplitude and higher frequencies than that of the proposed controller.
Comparison of peak-to-peak oscillation amplitude of control performance results in the presence of external uncertainties.

MRFC: non-adaptive model reference formation control; SMFC: sliding mode formation control.
The velocity performances (Figures 17 and 18) show us that the MRFC and SMFC exhibit velocity oscillations which remain at considerable frequencies and amplitudes, and never converge to zero under the impaction of uncertainties. Meanwhile, our proposed controller performs a much improved results in which the velocity converge to a bounded range closed to the leader’s velocity. The attitude performances as shown in Figures 14, 19, and 20 also support the demonstration of the effectiveness of the proposed algorithm.
In summary, the simulation results showed that while all three tested approaches perform equally well in the absence of external uncertainties, that is, they provided both a fast response and good performance for maintaining formation shape, clear performance differences appeared once external disturbances were applied. In this study, the best performer was the proposed RAFC that is relatively simple to design and promises to maintain good control of the vehicles even in the presence of external perturbations, yielding the smallest tracking error, fastest response, and adaptation from among all three tested approaches.
Conclusions
This article presented a RAFC algorithm for a group of quadcopters. The simulation results have shown that all quadcopters are capable of converging to the desired formation pattern and track the desired formation trajectory both with and without the presence of uncertainties. We were able to demonstrate the effectiveness and robustness of the proposed method which presents a significant advancement compared to previous studies. However, we fixed the formation topology and the vehicles were only expected to perform a formation flight in the x–y plane. Our future work will focus on solving the RAFC problem in full 3D space and allow for a switching formation topology.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by The Competency Development Program for Industry Specialists of the Korean Ministry of Trade, Industry and Energy (MOTIE), operated by Korea Institute for Advancement of Technology (KIAT) (Grant No. N0002431), and The Ministry of Science and ICT (MSIT), Korea, under the Information Technology Research Center (ITRC) support program (Grant No. IITP-2018-2019-0-01423) supervised by the Institute for Information & Communications Technology Promotion (IITP).