
Abstract
In a given manufacturing setting where workers or robots are coexisting in a confined area and their movements are not coordinated due to loss in communication or because they are freely ranging relative to each other, the development of an onboard safeguard system for a robot becomes a necessity to reduce accidents while the production efficiency is uncompromised. This article develops a two-dimensional dynamics model that predicts the relative position between a robot’s end-of-arm tooling and an approaching object or threat. The safety strategy applied to the robot is derived from the calculation of three parameters: the time of collision predicted from the linear motion between the approaching object and the robot’s end-of-arm tooling, the relative absolute distance, and the overlapping area ratio. These parameters combined are updated in a cost function that is sufficiently alarming the collision severity of an approaching object in real time. This model enables deployment a safe and a productive collaborative interaction in the manufacturing environment where workers and robots are seemingly moving in close proximity within an open workspace with less safeguard barriers.
Introduction
There is a need to develop predictive collision methods to improve worker–robot safety due to the increase installation of industrial and service robotics system in factories worldwide, where 1.4 million new industrial robots were expected by 2019 attributable to the use of autonomous guided systems. 1 Over the years, assessment methods have been deployed to improve the safety and reliability of robots serving several industry sectors including production, warehouses and logistics, autonomous transportation, and health-care assistive mobile robots. 2 Occupational accidents have been reporting worker injuries—those due to engineering and human errors 3 such as lack or absence of safeguard system to stop or slow down the operation of robot when a worker accidently enters robots work envelop, modifications to machinery program, or bypassing safeguards as well as inexperience of workers. The occupational machine-related accidents accounted for over 5000 fatalities in the United States during 2003–2010, of which 23% of fatalities were due to stationary machinery and 77% caused by mobile machinery. Manufacturing and construction were among top hazard industries accounting for 14% and 22% of the fatalities, respectively. 4 In the United States alone, the Bureau of Labor Statistics revealed 717 fatal work injuries occurred during the year 2013 as a result of direct contact with object. 5 Reports in Canada and in the Netherland revealed that most accidents are caused by operators entering hazardous zone of machinery during maintenance and the handling of production disturbances. 6,7 The worker safety is typically monitored by speed and separation from a robot which together used to detect collision in advance by particular reaction strategies and safeguards tools. 8 The tools include not-contact ultrasonic position sensors, contact capacitive or piezoelectric force and pressure sensors, door interlock switch, virtual barriers enabled by laser curtain, restricted work envelop that allows program robot movement within the desired workspace, pressure mat to detect the presence of operator, optical cameras, motion capture systems, and many others. Moreover, one common fenceless technology is laser scanners which have been traditionally used to safeguard a predefined number of zones around dangerous machinery. 9 Position-based collision mitigation are applied today in cyber-physical system where robot workspace is typically predefined into three safety zones to detect the human presence or moving machinery like AGV’s. These technologies focus on safety first regardless of the efficiency of the manufacturing process. For example, wearable surface pressure sensor array on collaborative robot, such as MRK-Systeme KR SI, Fanuc CR-35iA, ABB YuMi, UR5, and KUKA LBR iiwa may lead to a reduced robot speed or entire motion stop at object detection. 10 The common practice is to enable all safety tools regardless of its effect on the production rate. Of course, while priority number one is to protect people in workplace, it is not yet clearly understood the trade-offs between safety and efficiency of robot.
Related work
The production efficiency in advanced manufacturing environment might be improved through the increase of the number of collaborative robot installation, however, that comes at the cost of risking the safety of coexistence with the workers. Particularly, “just-in-time sensing” based safety methods might not be adequate to address the issue of downtime in production when accidents or interference have already occurred. On the other hand, predictive collision-free algorithms—such as dynamic programming, genetic algorithm, and distance transform methods 11 are commonly used to optimize the path and the speed of mobile robots in the presence of obstacles. Similarly, to improve the efficiency of the manufacturing and the safety between human and industrial robot arm in a shared workplace, the path of a worker roaming around end-of-arm tooling (EOAT) of robot can be predicted at an instance and kept updated in real time with goal to estimate the future level of collision before accidents happen.
The goal of robot path planning in dynamic environment is to create a collision-free route more accurately and timely. Masehian et Al. survived over 1381 articles covering classic and heuristic approaches in robot motion planning within time span 1973 to 2007. 12 Classic methods were popular prior to 1982 and it uses general approaches such as roadmap, cell decomposition, potential fields, and mathematical programming. Classical methods such as PF, DWA, A*, and PRM path planning are easy to implement, perform better when blended with other methods, fast with respect to response time. 13,14 However, such conventional methods are computationally expensive and typically rely on accuracy of cameras and sensors to collect data from the environment; making measurement uncertain when noise are inherent. 15 For example, a heuristic A-Star and dynamic steering algorithms use predefined grid-based environment map to find the shortest path based on information received from sonar sensor. 16 Distance remote control algorithm was developed to predict and avoid collisions between vehicles by maintaining a given safe distance between the robot and the obstacle. 17 Potential fields were first introduced by Oussama Khatib in 1986, where an attractive potential pulls the robot toward the goal configuration, and a repulsive potential would push the robot away from the obstacles. 18 The mathematical programming approach formulates an optimization from a set of inequalities on the configuration parameters that minimize collision. The dimension of the configuration space implemented in cell-decomposition is large and time-consuming. 19
Nikolakis et al. developed system that used depth data and tool center point coordinate system of a robot to calculate the distance between the robot’s end-effectors and worker in the workspace to control the speed of the robot and send notifications or alerts. 20 Long et al. developed a three-dimensional (3D) dynamic security zone for a collaborative robot UR10 to increases its performance in terms of average velocity by using three post-collision safety laser system. 21 Object detection around this robot was divided into three security modes: nominal mode, reduced mode, and passive mode, which change automatically according to the distance. Chen et al. studied the interaction efficiency of mobile robot in human traffic area to guide future design of robot-assisted pedestrian evacuation algorithms. 22 In their research, a laser range finder was integrated in Adept Pioneer P3-DX mobile robot, and a social force model experiment was also applied. The results showed that robot can detect pedestrian and avoiding the collision while maintaining desired average speed. Other obstacle avoidance methods used in path planning of mobile robotics include obstacle-dependent Gaussian potential field. 23 This method is applicable in static and dynamic environment without consideration of acceleration or speed of mobile robot. Distance histogram Bug algorithm is based on average path length and mainly implemented for static environment. 24 Other emerging techniques such as neural network, Fuzzy logic, and genetic algorithms are used for complex situations such as uncertain workspace and multiple inputs/outputs. 25,26
Safety methods for human–robot interaction in a fenceless robotic cell have been investigated with effort to maximize admissible velocity of a robot and to reduce injury. The projection of human arm motion into robot path was investigated to estimate the collision of robot. 27 This method is based on the optimal path related to the shortest duration of movement using segmentation of path and nonlinear programming; however, it does not consider size of objects and how speed control can be implemented to improve safety. Moreover, it uses noncost effective motion-tracking system that might be impractical for industrial application. Polverini et al. introduced assessment method using Kinetostatic safety field index only to study real-time collision avoidance in unstructured and dynamic environments. 28 The method uses mesh technique to calculate the index based on relative position and velocity vectors in real time between a moving rigid body “source of danger” and a point in space. Ragaflia et al. introduced trajectory generation algorithm acquired from different depth sensors for estimation of the kinematic configuration of human worker moving inside the robotic cell to maximize productivity function subjected to safety constraint. 29 The proposed algorithm takes into account volumes as obstacles modify the path of preprogrammed task of robotic arm. Sharkawy et al. utilized torque sensors data in multilayer feedforward neural network to train the dynamic model of joint manipulator with and without external contacts. 30 Mainprice and Berenson presented a framework that allows the human and the robot to perform simultaneous manipulation safely based on early prediction of the human motion to enable collaborative tasks in close proximity. 31 Wang et al. introduced a safety index with a distance factor is defined to describe the level of safety during physical human–robot interaction. The optimization problem was solved within the sampling time of the system allowing algorithm be applied in real-time trajectory generation. 32,33 Kanazawa et al. obtained robot’s trajectory based on a probabilistic prediction of the worker’s motion and the reduction of waste time simultaneously. 34 Notable summary of advantage and disadvantage of popular obstacle avoidance method are presented in Table 1. More recent in-depth reviews of techniques related to the navigation of unmanned mobile vehicles through various environments with obstacles can be found in the following literatures. 35,36,37,38,39,40,41
Summary of few path planning and obstacle avoidance methods.

This article presents the development of obstacle avoidance method for industrial robots in manufacturing workplace based on prediction of dynamic motion of an approaching worker or robot within a shared workplace. Furthermore, the article discusses a mechanism to maximize efficiency and safety of shared workspace. The article introduces real-time prediction model of collision between a stationary industrial robot and a moving target based on a cost function that accounts for estimated time of impact, distance to impact, and the affected area of collision. The article offers a novel continuous speed control of robot based on simple cost function. Unlike majority of traditional industry-based safety methods which relies on the events to take place or on enforcing robot to change its path, the goal is to warrant robot or worker enough time by slowing down robot’s speed; therefore, giving worker enough time to take corrective action and avoid collision that may result in production downtime and injuries. The article is organized as follows: a description of the robot–worker shared space is defined in the “Related work” section. The relative position derivation is obtained from distributed sensor measurement. Linear dynamic path prediction of worker is derived and used in collision and safety models. An illustrative simulation example is presented in detail in the “Method” section. Worker trajectory and robot path are used together to calculate collision parameters, which are then used in cost function. Finally, collision and safety model is suggested to calculate the probability of collision and its effect on robot efficiency.
Method
Problem definition
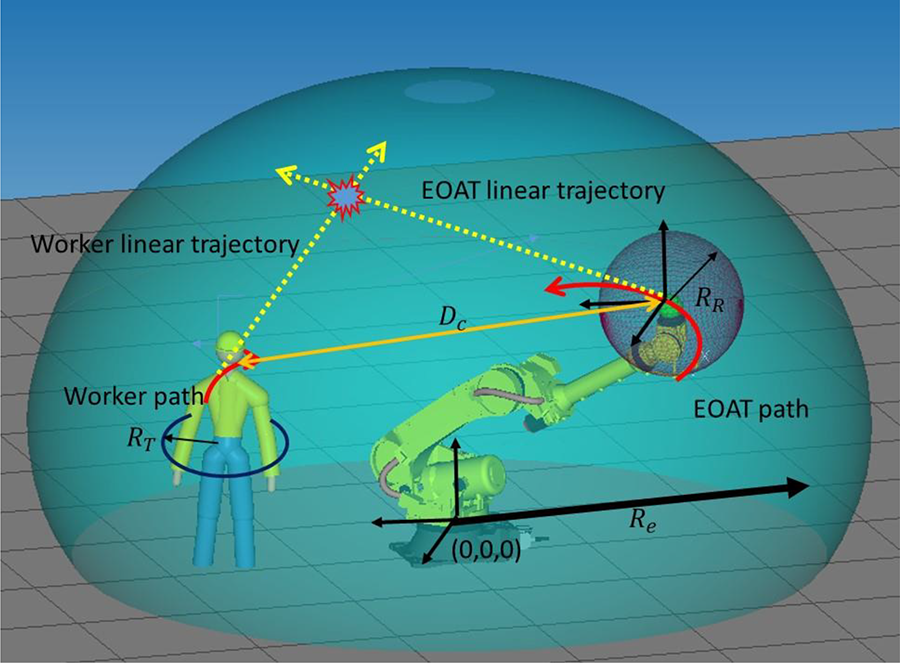
This project investigates a work environment comprised of an industrial robot arm and a fast-moving worker shown in Figure 1. The goal is to track the position vector of the worker relative to the robot’s EOAT and then predict whether the motion trajectories would lead to possible collision. A collision cost function that decides the threat level is defined here from three parameters, simultaneously: time-to-impact
A worker in work envelope of a robot.
Measurement of the relative position
A simplified two-dimensional (2D) kinematic model for the work environment in Figure 1 is obtained and shown in Figure 2. The dynamical model assumes two moving areas in planner workspace with the goal to better understand the trade-offs between safety and efficiency, while a 3D space model can be simply obtained by adding the third independent motion into the model in terms of depth coordinate. An arrangement of at least two position sensors S
1 and S
2 would provide 2D measurements within a confined area. The sensors are fixed relative to a world Cartesian coordinate at absolute position vectors
The angle formed by vectors

Apply the cosine law for each of the two triangles formed by the origin of the world Cartesian coordinate system, the worker and each sensor. This yields


The unknown distance
Then calculate the worker angle


Kinematic model for tracking worker. The position vector
Finally, the position components of the worker relative to the world Cartesian coordinate are obtained as follows

In summary, it is plausible to calculate the 2D position of the worker by using two noncollinear distance sensors. The accuracy of the worker’s position is sensitive to the quality of the data measured in real time. Therefore, high-end sensors (i.e. capable of extracting depth such as ultrasonic, laser, radar, optical camera, and motion capture system) are recommended together with classification and filtration techniques that help reduce undesired noises in the prediction model. For example, generalized hough transform technique could be used in vision systems to extract the key features of moving object including its dimension and distance. 57
Linear dynamic trajectory
Consider the worker position
In this article, it is assumed that the dynamic motion of the worker at

where the prediction time


Therefore, it is sufficient to store three position samples at
It should be noted that the trajectory in equation (6) provides a realistic assumption about the motion of the worker. This could be justified because the trajectory is periodically updated. Other models relevant to social behavior could be investigated such as random walk, Markov Chain, and swarm or Brownian motion. Moreover, the linear trajectory model should be sufficient to predict the motion of worker when sampling rate is increased; however, the risk of collision is expected to be higher.
Collision model
A collision occurs in an areas

where

where

where
Safety model
The goal of a safeguard system is to continuously control the velocity

Suggested safeguard control system of a worker within the vicinity of an industrial robot.
The constant values
Illustrative simulations
Real-time tracking and calculation of true impact
In a real-time prediction model, a discrete-step solver for simulation could be chosen for robot controller. Most modern robot controllers are running a cyclic control software, for example, 10 ms (or the better one 1 ms) for the position control loop. KUKA, for example, provides an RSI interface running at 1 ms and FANUC has a similar system called “dynamic path modification.” Furthermore, vision system suffers from delay time during tracking of an object. Vision systems typically do not operate at 1 kHz rather most vision system run at 10–50 frames/s. In this simulation, long-range laser triangulation distance sensor is assumed, which typically has measurement rate much better than 1 kHz.
In this example, a robot moves in circular coordinate with parametric functions described by

True paths of the worker and the robot simulated over time period
A true or “physical” impact between the worker and the robot is said to occur when the true moving areas physically overlap, that is, the impact time
True impact between worker and robot

a to is zero when the algorithm is used to check true collision.
b Calculated in MATLAB using “bboxoverlapratio” function.
Predictive impact model
Real-time tracking provides current and prior information for the position of the worker as function of time, but future positions are unknown due to the randomness of the human intention. Therefore, majority of safeguard technologies used in industrial robotics environment rely on the actual presence of the worker, where robot’s controller is alerted only when the worker resides within predefined zones that are fixed around the space of the robot. Such alerts might be too late to prevent accidents especially when the worker or the robot movement is too fast! Instead, a time-varying predictive model of the worker path was introduced in equation (6) to provide a set of future positions of the worker calculated at every instantaneous position of the robot. This simply appears as trajectories tangent to the path of worker.
In the following simulation example, the case study in the previous section is used to predict the trajectory profile of the worker by using equation (6
–9) starting at absolute time instant

The simulation of the predicted trajectory of the worker starts at
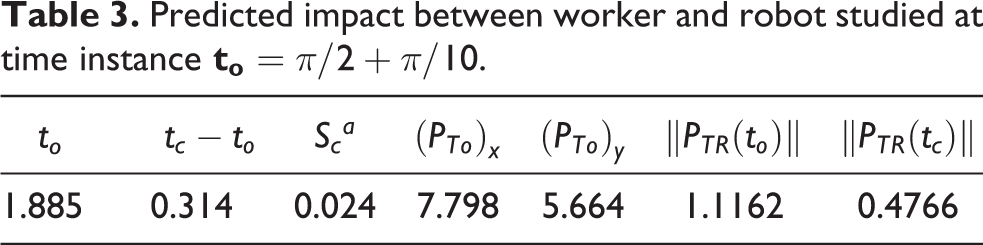
Predicted impact between worker and robot studied at time instance
The above procedures are repeated for every time step
Predicted impact between worker and robot studied for time period

Cost function and the probability of collision
Let the multi-input-single-output model

where

Simulation of the predicted trajectories of the worker and the true path of robot generated over
In this simulation example, we choose
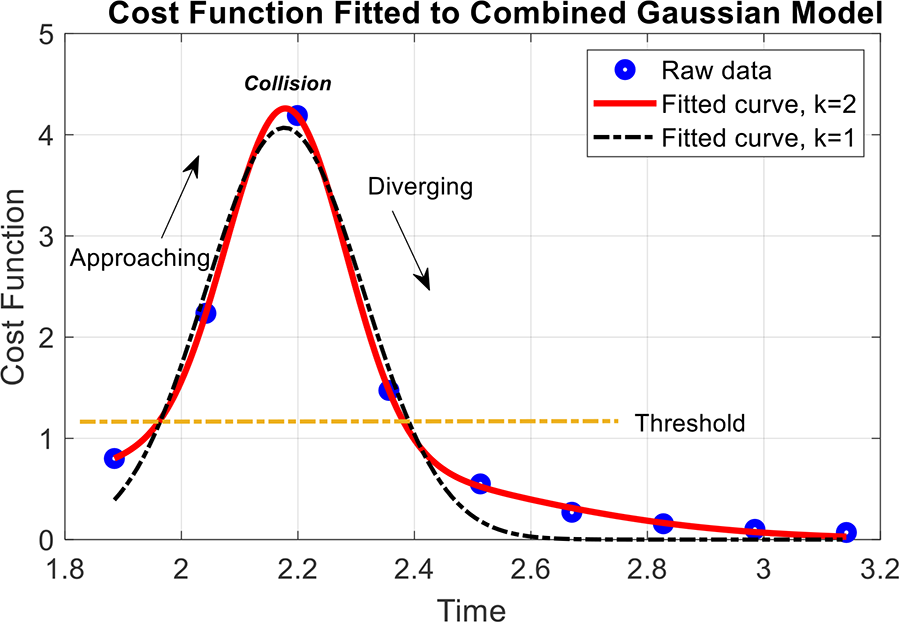
A fitted cost function curve simulated over
The cost function data in Figure 7 could be fitted into a combined Gaussian curve of form

where

The above model provides accurate fitting of cost function at any time. To better understand the meaning of the distribution function, a first-order Gaussian distribution is generated using “guess1” function in MATLAB and then plotted together with the second-order and the raw data in Figure 7. The fitted first-order Gaussian function with

This first-order Gaussian distribution reveals that the true impact happens at the mean value

Probability of collision curve simulated over
Higher-order Gaussian combinations are suggested for scenarios involving multiple true impacts which appear in the form of peaks in the cost function curve. For example,
Safety control system
The controller model selected in this example is a simple attenuator

Speed of robot after applying safety control system.
Robot productivity
Assume the robot productivity index is measured by the total energy cost function computed over a range of time

When there is no worker around the robot, the robot speed remains unchanged. In the example discussed earlier, an uncontrolled robot operates at normal speed of
Discussion
The collaborative human–robot interaction introduced in this research acquires information from the pair of sensors to update the robot Euclidean position in real time. In an unknown manufacturing environment, where worker’s motion trajectory is uncertain, an auxiliary microprocessor predicts future positions of the worker by assuming a worker moving in a constant acceleration. Because the proposed method uses minimum number of sensors, high sensitive and accurate distance sensors should be installed to improve the reliability of the calculated safety level.
The trajectory generated by the microprocessor is kept updated in real time. On the other hand, because the robot path is typically preprogrammed and deterministic, it is compared with the generated trajectories in real time with goal to search for possible future intersection(s). The simplicity of the mathematical model made it easy to impose multiobjective functions and control scheme. This prediction model was then combined with manufacturing efficiency through a contentiously updated cost function which is directed to control the speed of the robot. The key approach for predicting a collision is pertained by applying four factors that encapsulate the predicted time to collision, distance to collision, overlapping area at collision, and a manual remote control parameter determined by the user.
The simulated case study produced a cost function with multimodal Gaussian distribution. The mean values of the distribution are located at the peaks and correspond to high probability of collision. At such instants, the robot smoothly decelerates to a quasi-static stop and then accelerates to continue its normal operation specially when the threat is sufficiently far-off. The smaller the variance of the distribution is, the less time is given to the robot to react to the threat. However and in accordance to the proposed productivity index—which was defined by area under speed and time curve—the robot efficiency increases when the gradient of the cost function is steep.
The physical realization of the proposed prediction method becomes feasible to implement mainly because it requires few measurements as compared to classical and modern obstacle avoidance methods. These data are collected from a pair of sensors configured to scan a sectional area whose size depends on the range of sensing technology used. The method can be extended to cover larger area by summing data from other pairs of distributed sensors.
Future work
The preliminary setup in Figure 10 is being constructed to deploy the developed safety algorithm in an open workspace environment where a threat—like a worker—is prominent. The system is comprised of Mitsubishi RH-6FHD robot with CR-750 controller, and two low-cost long-range ultrasonic sensors connected to an external Arduino controller. The worker position and the cost function are being calculated in real time using the Arduino microprocessor, which then sends signal to the robot I/O. Currently, the Arduino controller is programmed to produce three digital outputs, and a robot program—written in MELFA RT-toolbox software—operates at three distinct speeds depending on the value received from I/O. However, this setup requires preprogramming and synchronizing with the motion of the EOAT, which is impractical for real-time experiment and verification. Therefore, we plan to continue with development by enabling Arduino and robot controllers to talk back to each other using analog signal instead of digital. More particularly communicate the position of the EOAT to PC and have it scanned by Arduino via USB port.

Experimental apparatus.
Conclusion
We developed a continuous speed control system to improve human–robot safety while robot productivity is not compromised. The predictive dynamic motion model for a human moving relative to a robot provided an accurate mean to estimate the future impact conditions which are used to construct a Gaussian cost function. This is used to calculate the probability of collision within a range of time and design a safety model to control speed of the robot in real time and based on the overall threat level. The case study showed that for an EOAT of a robot moving in deterministic motion under no safety control, an arbitrarily approaching worker poses a threat that would lead to a physical impact. However, when the safety control was deployed, the robot’s speed responded proportional to the cost function and led to only 24% reduction in productivity during entire operation. This is very promising result specially because it does not lead to complete downtime in robot operation. The proposed algorithms can be used in application involving object locomotion such as mobile robots, driverless cars, and unmanned aerial vehicles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is conducted under support from Ohio Department of Higher Education (ODHE) and Regionally Aligned Priorities in Delivering Skills Program (RAPIDS 4.0) grant “Automated Guided Vehicles for Smart-logistics and Safe Material Handling in Advanced Manufacturing and Warehouse Industries.