
Abstract
Obstacle avoidance methods require knowledge of the distance between a mobile robot and obstacles in the environment. However, in stochastic environments, distance determination is difficult because objects have position uncertainty. The purpose of this paper is to determine the distance between a robot and obstacles represented by probability distributions. Distance determination for obstacle avoidance should consider position uncertainty, computational cost and collision probability. The proposed method considers all of these conditions, unlike conventional methods. It determines the obstacle region using the collision probability density threshold. Furthermore, it defines a minimum distance function to the boundary of the obstacle region with a Lagrange multiplier method. Finally, it computes the distance numerically. Simulations were executed in order to compare the performance of the distance determination methods. Our method demonstrated a faster and more accurate performance than conventional methods. It may help overcome position uncertainty issues pertaining to obstacle avoidance, such as low accuracy sensors, environments with poor visibility or unpredictable obstacle motion.
1. Introduction
A mobile robot must be able to get to its goal location without collision. Many approaches have been proposed to achieve this. Robots are capable of moving as intended with the positions of the robot and when the obstacles are known. However, a robot navigating an environment is subject to the measurement noise of the environment. Thus, the robot has to estimate the relative position of obstacles using the probabilistic sensor model.
The collision probability distribution is related to the position covariance [1]. However, the collision probability distribution has no boundary, meaning that the robot cannot maintain an intended distance from obstacles. Therefore, the robot should possess the ability to determine the boundary of the collision probability distribution, as well as calculate its distance from this boundary. The conventional approaches are discussed here.
The simplest approach is to calculate the distance without the position covariance. If a highly accurate measurement is available, this will facilitate a quick and easy solution. However, the position covariance depends on the environment. In addition, obstacle motion prediction increases the covariance [2]. Therefore, an alternative approach is needed in order to consider position uncertainty.
The second approach is to consider the collision probability distribution using the occupancy grid [3–4]. The obstacles are represented in an occupancy grid, while the distance to an obstacle is the distance to the nearest occupied grid unit. The occupancy grid approach takes position uncertainty into consideration, unlike the first approach. However, the occupancy grid approach requires a long computation time. The computation time is increased alongside increasing resolution of the grid.
The third technique is the error ellipsoid approach [5]. The error ellipsoid is the confidence region of a normal distribution. A mobile robot can determine the distance to an obstacle by considering the error ellipsoid. However, the error ellipsoid approach has only statistical significance [6–7]. There is no physical meaning, such as distance or collision probability. Even the conventional method of calculating the distance to the ellipsoid only considers the Lagrange multiplier error [8].
These approaches are not suitable for determining the distance of the mobile robot from a given obstacle. The position uncertainty, computation time and collision probability must be considered in order to determine the distance that ensures a negligible collision probability. The mobile robot can avoid collision in a stochastic environment using the suitable distance determination method.
In this paper, we propose a method to determine the distance that satisfies the above conditions. The proposed method consists of two steps. First, the obstacle region is determined by a collision probability density threshold. The distance function to the obstacle region is defined using the Lagrange multiplier method. Second, the solution is computed by a root-finding algorithm. The proposed algorithm can be easily applied to conventional collision-free path planning methods.
This paper is organized as follows: section 2 defines an obstacle region, a distance function with the Lagrange multiplier and a root-finding algorithm; section 3 compares the performance of the proposed method and conventional methods using three simulations; and section 4 concludes this paper and discusses potential applications.
2. Distance Determination Algorithm for Obstacle Avoidance
Let
Obstacle region (a) Let
First, a new coordinate system is implemented. The eigenvector of its covariance is represented by eigendecomposition:
The probability density of
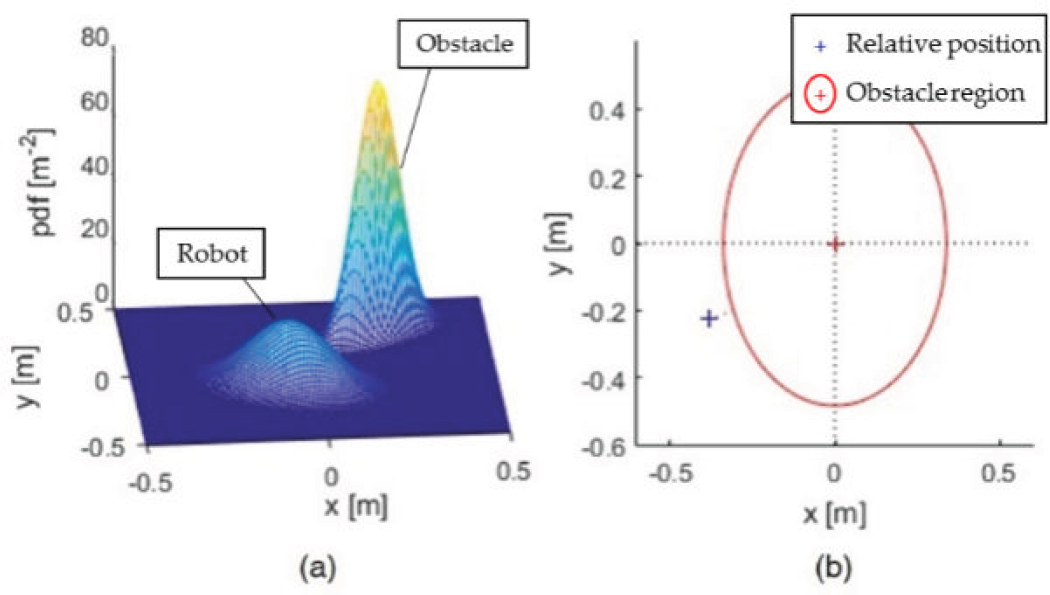
The obstacle region E is a set of relative positions, which have a greater than negligible collision probability density (see Figure 1(b)).

where ρ is the collision probability density threshold and
Let

Volume of the obstacle region (a) Assuming an obstacle is moving from left to right, its position is

The boundary of E is a n -dimensional hyperellipsoid. Therefore, the following equations are established:


where
There are only two points satisfying

From Eqs. (2–3),
Property 1.1 means that E disappears if the position uncertainty is too high. This property is apposite when obstacles are far enough away from the robot. However, it makes it difficult for the robot to avoid obstacles when obstacles lie near the robot. Therefore, the robot should set an alert area for which E has necessary volume. The following property pertains to the range of ρ when considering this alert area.
E should have volume in the alert area. If

The
Assume that

where SA is the possible standard deviation matrix. The above equation is arranged as:

If ρ satisfies Property 1.2, then the robot can recognize the collision probability resulting from relative position uncertainty. Collision-free path planning is achieved by maintaining
The distance calculation between ℛ and

where ρ satisfies Property 1.2 (see the first paragraph of this section for notation).
If the relative position is inside of E, which is a condition that is easy to check, then the distance is zero.
The boundary of E is a set point equal to the Mahalanobis distance of

From Definition 1, points included in E have a constraint as follows:

If

Therefore, the minimum distance between
Property 2.1 describes the case for which the relative position is within E. However, in general, the relative position is outside of E. Therefore, the Lagrange multiplier method [10] is used to calculate dU.
If the relative position is outside of E, the Lagrange multiplier method is used to find the minimum distance subject to an equality constraint. Then, dU can be redefined using the Lagrange multiplier λ.
where I is an identity matrix.
The Lagrange function corresponding to Definition 2 can be defined as:

where



The variable


Similarly,

Property 2.2 is supported by Eqs. (4–6).
Finding the closed form expression of dU is difficult when the relative position is outside of E. Property 2.2 cannot calculate dU directly; however, it can distinguish whether or not λ is close to the solution. Therefore, a root-finding algorithm is used in order to solve Eq. (4). The following algorithm is a process to determine the distance by implementing Properties 2.1 and 2.2.
In lines 1-2, the relative position and covariance are calculated. If both the robot and the obstacle are point masses, then this algorithm returns a Euclidean distance (line 3). In line 4, it checks
Thus, an interval
where
In order to satisfy conditions i-iii, the interval is inferred by

where




From Eqs. (7–8), the interval containing a root can almost be initialized. The value of g at the end points of the interval


where
The above algorithm applies Eqs. (7–8) in lines 1-2 and sets the initial searching point in consideration of condition iii in lines 3-4; the initial searching point is derived from the derivative of
The sign of
The iteration process of algorithm 2 is simple; at each iteration, the interval is divided in two at the midpoint
This interval initialization is in preparation for an efficient root-finding. If the interval contains both bounds, the root-finding method can use an interpolation technique, which is fast. Also, the distance function at this interval is a monotone function; therefore, the distance error bound calculation is possible with a simple computation. Algorithm 3 is the root-finding algorithm in consideration of distance error.
This algorithm is based on the Van Wijngaarden-Dekker-Brent method [11], a popular root-finding method that superlinearly converges to the root. It modifies the loop repetition condition and error criteria for considering distance error, unlike the original method [8], which considers the Lagrange multiplier error. The calculated distance error bound determines whether to repeat the loop or not. In other words, it establishes the distance error margin.
Line 3 is the loop repetition condition. If the searching point satisfies Property 2.2 or the interval has a distance error smaller than the distance error margin ε, the loop terminates. It then tries to use the fast-converging method in lines 4-6: namely, an inverse quadratic interpolation and secant method. If it fails or the result is not good, it implements a robust bisection method in lines 7-13. Lastly, it updates the interval using the search result in lines 14-17.
The determined distance computed by the proposed algorithm has two criteria: ρ and ε.
These criteria, pertaining to position uncertainty, help with improved distance determination over methods using other criteria, such as confidence [5], or the Lagrange multiplier [8]. Using the proposed algorithm, the mobile robot can compute the distance in the high collision probability region. Figure 3 shows an example of the overall process of the proposed algorithm, while a performance comparison with the conventional method is described in the next section.

Process of calculating the distance between ℛ and
3. Simulations
In this section, the proposed method is compared with conventional methods. These methods include the uncertainty determination method and the distance computation method, which use parameters listed in Table 1. The proposed method is
Distance determination methods

3.1. Distance to a single obstacle
The purpose of the first simulation is to ascertain whether these methods can determine distance considering position uncertainty. The constraints of this simulation are the distance error margin
Let us consider a single static obstacle in a two-dimensional workspace (see Figure 4(a)). The mobile robot moves around the obstacle while maintaining a distance of 1
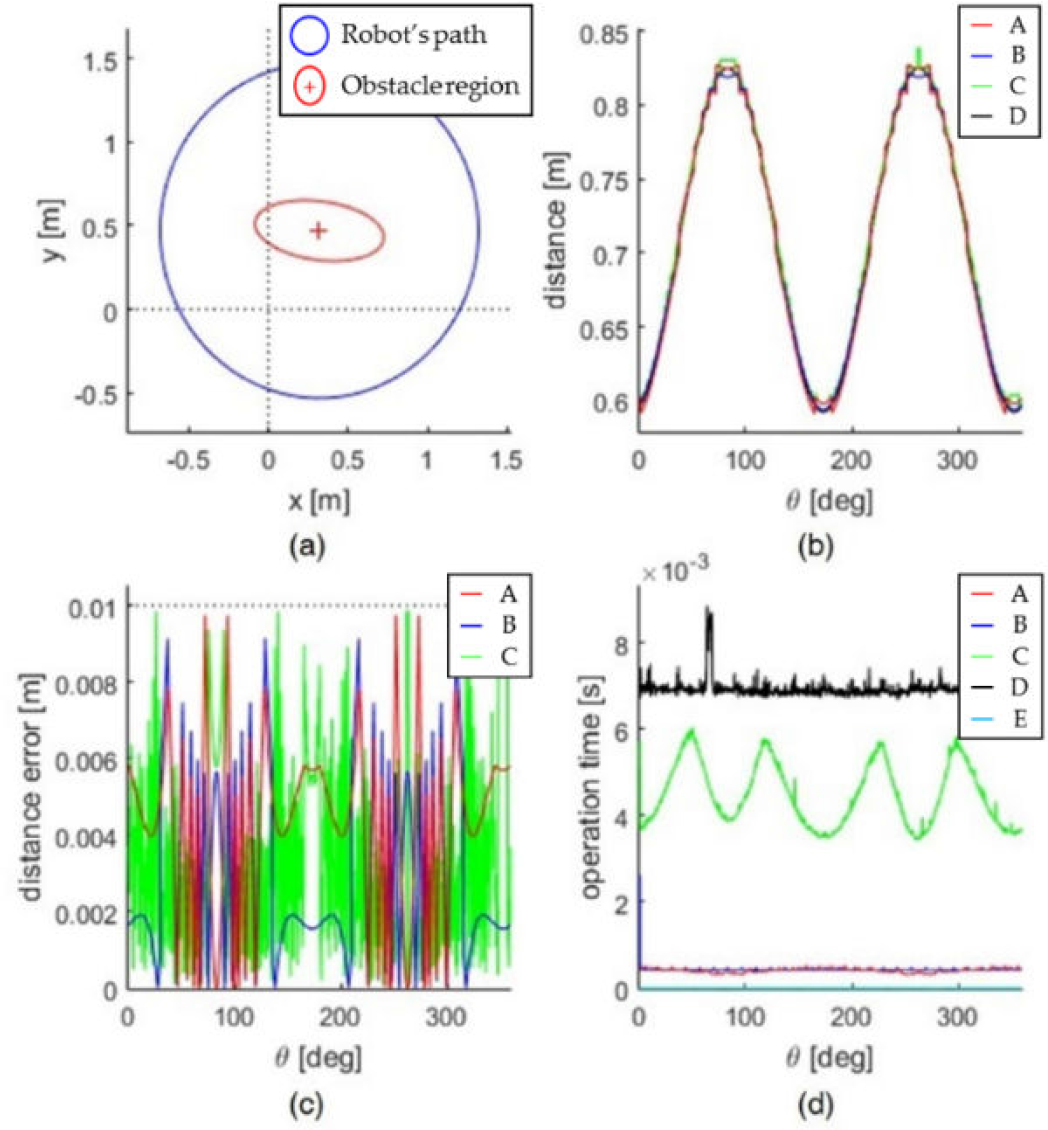
First simulation: a single static obstacles in a two-dimensional workspace. Each colour in (b), (c) and (d) represent each method.
Figure 4(b) shows the distance computed by
The distance error of
The maximum distance error of
First simulation: a single static obstacle in a 2-dimensional workspace. The number of samples used in each method is 103.

The simulation results show proposed method
3.2. Distance to multiple obstacles
The second simulation is an extension of the first simulation: the workspace is extended to a three-dimensional space, in which multiple obstacles exist (see Figure 5(a)). Unlike the first simulation, the operation time constraint is applied. The parameters are adjusted in order for

Second simulation: multiple static obstacles in a three-dimensional workspace. Each colour represents a different method in (b), (c) and (d).
Figure 5(b) shows the minimum distance between the robot and the obstacles. The maximum distance error of
Second simulation: multiple static obstacles in a 3-dimensional workspace. The number of samples is 103 for each method.

The second simulation shows that
3.3. Distance determination and collision avoidance
The third simulation is used to apply distance determination methods in the context of obstacle avoidance. Let us consider a local path planner using a potential field method [12]. This path planner controls the direction of the mobile robot based on attractive and repulsive forces; the destination creates an attractive force, whereas the closest obstacle creates a repulsive force. In order to simplify the situation, this path planner only uses distance information.
Given that the base path planner cannot consider position uncertainty, its obstacle avoidance capability is dependent on the applied distance determination method. Therefore, the utility of
The mobile robot should move to the goal area without collision. There exist static and dynamic obstacles, while the mean and covariance of the obstacle position are estimated (see Figure 6(a)). In order to simulate the worst case, it is assumed that the real obstacle position is a point cloud that is normally distributed. Each point in the point cloud is a position at which the obstacle may exist (see Figure 6(b)). The collision occurs when the closest point is within the radius of the mobile robot.
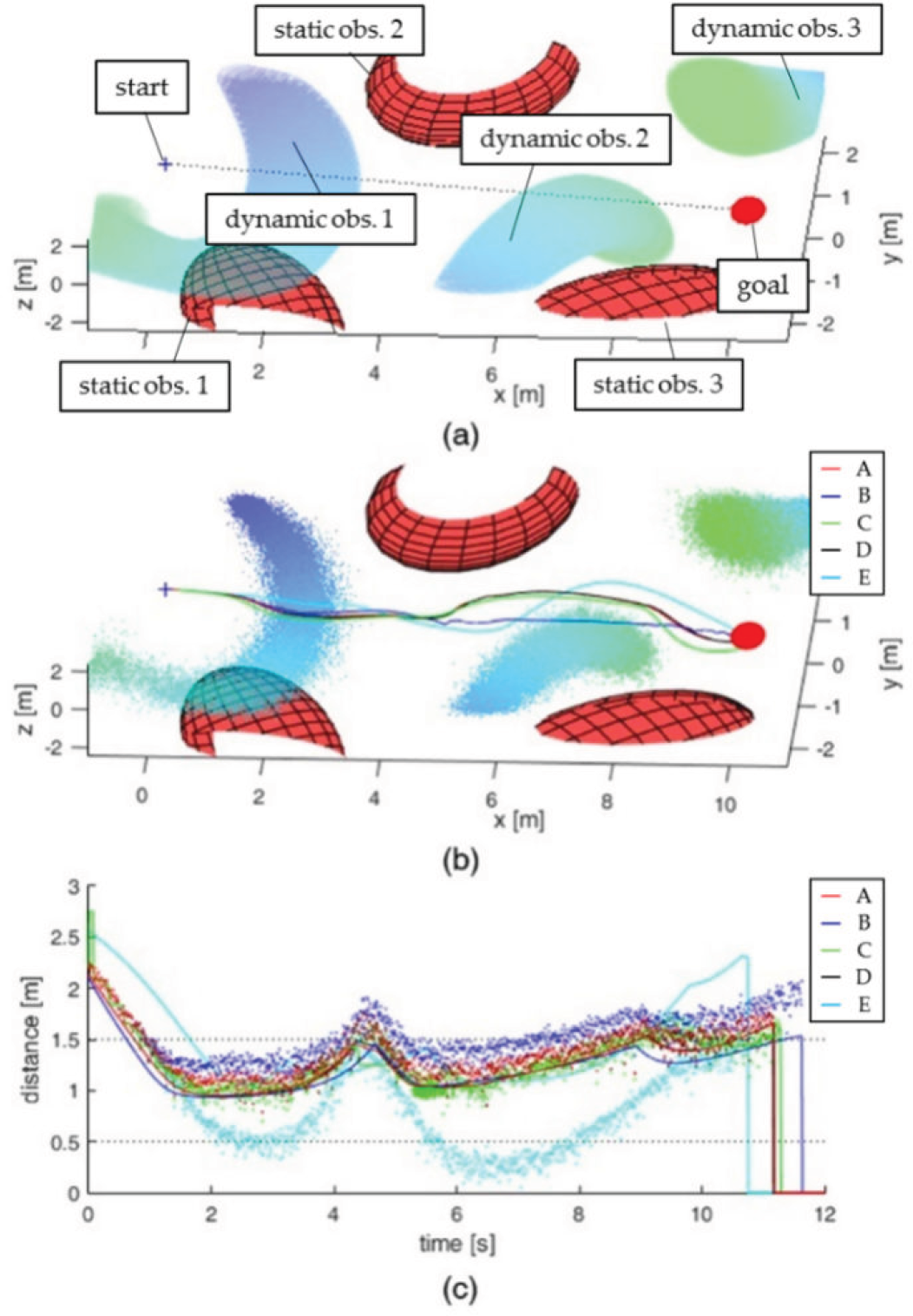
Third simulation: collision-free path planning using the potential field method in a three-dimensional workspace. Each colour represents each method in (b-d).
The five collision-free paths are generated by
Third simulation: collision-free path planning using the potential field method in a three-dimensional workspace

Therefore, the fastest collision-free path is that generated by method
4. Experiment
This section shows a preliminary experiment on a real robot. The purpose of the robot is to move to the destination while avoiding collision with randomly distributed obstacles. Distance determination methods provide distances for preventing collisions. If the determined distance is too short, the collision probability is increased. Conversely, the robot should go around the long way. Therefore, the determined distance can be evaluated by travel time and distance to the closest obstacle.
The experiment is run in a corridor with a width of

Environment of the experiment (a). The mobile robot at the starting point (b). The map given to the robot.
The robot used in the experiment is Pioneer3dx [13]. This is a differential type of mobile robot. This robot can be assumed to be a disc with a radius of
The localization is based on the discrete-time extended Kalman filter [14]. First, the robot pose

where
In turn, the following covariance is predicted:

where
Using the sonar ring and landmarks, the robot pose and covariance can be estimated as follows:
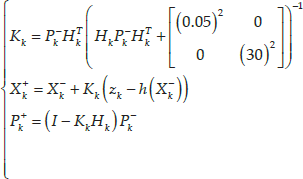
where Kk is Kalman gain,
Figure 8 shows the estimated position and real path of the mobile robot. The position uncertainty is represented by an ellipse, while the real path is in the expected range. However, E is the only method that does not consider the position uncertainty. Rather, it collides with an obstacle (see (5.3, 0.5) at Figure 8(d)). When colliding with an obstacle, the determined distance to the obstacle is

Experiment: obstacle avoidance in the corridor (a) Using
The path of
See Table 5.
Third simulation: collision-free path planning using the potential field method in a three-dimensional workspace

5. Discussion
The proper distance determination method for collision-free path planning should consider position uncertainty, operation time and collision probability. However, conventional methods do not satisfy all these conditions. Thus, we propose a method that addresses all of these conditions in order to help obstacle avoidance of mobile robots. Simulations and an experiment were executed in order to compare the performance of the proposed method
Method
Method
Therefore, we proposed a distance determination method. The obstacle region is defined, while the distance function is organized by a Lagrange multiplier method. In order to solve this problem effectively, the modified Van Wijngaarden-Dekker-Brent method is used. Unlike the conventional method, it is capable of determining the distance effectively.
The proposed method can prevent collisions caused by position uncertainty. The three simulations show that the proposed method is fast and robust: even if the operation time is higher than ideal, it ensures a collision-free distance by setting a distance error margin. Therefore, this method can be applied to a conventional path planner, without the burden of computation.
6. Conclusion
The purpose of this paper was to determine the distance to the normally distributed obstacle. Our method raises the obstacle avoidance performance of the robot, especially for highly uncertain environments. Simulations and an experiment showed that the proposed method achieves the purpose, regardless of environments.
This paper shows the potential field method application. However, other motion planners, such as the rapidly exploring random tree [15] and the fast marching square method [16] can use our method. In other words, it can facilitate consideration of the stochastic environment in relation to existing motion planners: the only constraint is that object position should be normally distributed. Future work shall aim to overcome this constraint.
Footnotes
7. Acknowledgements
This research was supported by Inha University.