
Abstract
The crucial problem of obstacle avoidance path planning is to realize both reducing the operational cost and improving its efficiency. A rapidly exploring random tree optimization algorithm for space robotic manipulators guided by obstacle avoidance independent potential field is proposed in this article. Firstly, some responding layer factors related to operational cost are used as optimization objective to improve the operational reliability. On this basis, a potential field whose gradient is calculated off-line is established to guide expansion of rapidly exploring random tree. The potential field mainly considers indexes about manipulator itself, such as the minimum singular value of Jacobian matrix, manipulability, condition number, and joint limits of manipulator. Thus, it can stay the same for different obstacle avoidance path planning tasks. In addition, a K-nearest neighbor–based collision detection strategy is integrated for accelerating the algorithm. The strategy use the distance between manipulator and obstacles instead of the collision state of manipulator to estimate the distance between new sample configuration and obstacle. Finally, the proposed algorithm is verified by an 8-degree of freedom manipulator. The comparison between the proposed algorithm and a heuristic exploring–based rapidly exploring random tree indicates that the algorithm can improve the efficiency of path planning and shows better kinematic performance in the task of obstacle avoidance.
Keywords
Introduction
Robotic system plays an irreplaceable role in building and operating space station among various aerospace mechanisms. Path planning research is a key technology for applying robot in space service, which is a significant branch of robotic research and is the most important task in robot navigation. 1 –4 The calculated amount of path planning algorithm depends on the complexity of tasks, the environment, and the quality requirement of target path. Thus, an expected path planning algorithm should realize both its efficiency and the quality requirement of path planning. Meanwhile, due to the specialty of space operational environment, the crucial problem of obstacle avoidance is to figure out the method of reducing the operational cost of manipulators and improving its operational reliability.
According to the mastery degree of the knowledge about space environment that robots have obtained, the path planning of obstacle avoidance can be divided into global path planning, based on the complete prior information, and local path planning, based on the information obtained by sensors. 5 Generally, the real-time information provided by sensors helps to know the location of the robot itself and the obstacles nearby, which are used for real-time path planning. 6 The gradient projection method is a hot topic discussed in recent years to solve obstacle avoidance path planning for redundant manipulators. Using Jacoby matrix null space of redundant manipulators, this method, through the self-motion of the manipulator joint, can complete subassignments of obstacle avoidance without interfering with main task. Xiang et al. prove that null space projection seriously restricts the performance of subtasks, and they propose a generalized weighted minimum norm method to solve the obstacle avoidance problem. 7 However, the gradient projection method needs to plan the end trajectory in advance, and the algorithm itself has no ability to plan the end trajectory. Due to the limited local information obtained, local path planning algorithms are easy to be trapped in local minima. 8 –10 Global path planning algorithms can be divided into two categories. The first category is based on the explicit map of environment, which is generally obtained by trapezoidal decomposition, visibility graph method, grid method, or Voronoi diagram method. Once the map has been created, the particle swarm optimization algorithm, genetic algorithm, and ant colony algorithm can be used to search for an obstacle-free path. For example, Wang et al. 11 use particle swarm optimization method to do path planning for mobile robots, which can achieve different optimization effect by different fitness function and it performs with high efficiency. Jabbarpour et al. 12 propose Green ant–based method for mobile robots to make obstacle avoidance path planning. Comparing with ant colony optimization method, genetic algorithm, and particle swarm optimization method, the simulation shows that the algorithm has better performance on travel time, travel length, and computational time. The above method needs to build the environment map in advance, which is often used to solve the path planning problem for the mobile robots. However, it is extremely time-consuming and difficult to build the environment map and the artificial potential field in high dimensional space. The second category of path planning is based on random sampling, which can take samples in configuration space of manipulators to avoid establishing explicit map. 13 This category mainly includes two kinds of algorithm, Probabilistic Road Maps (PRM) and rapidly exploring random trees (RRTs). PRM is suitable for multiple-query planning problem. Yet, the constant changing environment of path planning in space may result in difference between two queries. Thus, the algorithm in this article is based on RRT algorithm as it is suitable for single-query planning.
RRT algorithm is proposed by Kuffner and LaValle, 14 which uses random sampling method and tree structure extending for iteration searching with specific step. According to the characteristics of RRT algorithm, the modeling of high dimensional space is avoided by collision detection on sampling configuration, which improves the efficiency of the planning process. What’s more, some path planning problem with complex constraints can also be solved by RRT. Weghe et al. use RRT in Cartesian space with a 7-degree of freedom (DOF) manipulator. 15 The transpose of Jacobian is used in this method to avoid calculating pseudo-inverse of the Jacobian matrix. Qureshi et al. establish a potential field about obstacles in Cartesian space. The descent direction of potential gradient is used as the direction of extension. 16 However, both these methods do not have the capacity to optimize the path. Another modified RRT is proposed by Bertram et al., 17 which uses a heuristic exploring strategy. The original RRT chooses the closest node to the new sample to explore. On this basis, the modified RRT also considers the total distance between manipulator and obstacles as another index, so that the path obtained by this method always has an adequate safety allowance. This algorithm has a fast convergent rate but narrow searching scope, which makes the path to have a lower optimization degree. The global path planning algorithm can hardly plan a new path at once toward changing conditions. Thus, global path planning methods are expected to combine with local methods to complete a task. How to modify global path planning methods to make them effectively combined with local methods has not been considered in most research. In addition, in order to improve the operational reliability, the global obstacle avoidance path planning algorithm should be modified. Jaillet et al. 18 provide a variation of RRT called transition-based RRT (T-RRT), which builds a cost map of manipulator by Monte–Carlo method off-line. RRT algorithm is used in this map to search feasible path. Yet, the establishment of its configuration space is time-consuming for a redundant manipulator. Moreover, the position of obstacles could be different between two planning processes, so that the cost map cannot be utilized repeatedly. Berenson et al. 19 use gradient descent method based on T-RRT, which has a better optimization effect. However, the shortcoming of T-RRT still exists where it calculates the gradient of every configuration nodes before exploring, which results in low efficiency.
Based on these considerations, an obstacle avoidance independent RRT optimization algorithm led by potential field considering operational reliability is proposed in this article. Firstly, based on the analysis of mapping relationship among the influence factors of operational reliability, some responding layer factors, such as energy consumption, velocity of end-effector, and frictional wear of manipulator are used as optimization objective to improve the operational reliability. On this basis, a potential field to optimize the operational cost is established. Furthermore, a potential field of gradient is calculated off-line, which transforms calculating gradient of potential field into querying. The potential field of gradient is used to guide the expansion of RRT. Comparing with other methods, our potential field mainly considers the minimum singular value of Jacobian matrix, manipulability, condition number, and joint limits of manipulator, which are only related to the information about manipulator itself. Thus, the potential field can remain constant for different obstacle avoidance path planning task. In addition, the K-nearest neighbors (KNN) algorithm based on collision detection strategy is integrated into our path planning method. This strategy uses the distance between manipulator and obstacles instead of the collision state of manipulator to estimate the distance between the new sample configuration and the obstacle. The structure of this article is shown as follows: In the second section, the optimization object of the obstacle avoidance path planning algorithm is determined. The potential field for optimizing operational reliability is established in the third section. In the fourth section, the RRT algorithm guided by potential field is introduced. And the modified KNN–based collision strategy is also introduced in this section. In the fifth section, an 8-DOF manipulator is used to verify the effectiveness of the proposed algorithm. The last section is the conclusion.
The optimization objective of obstacle avoidance path planning algorithm for improving operational reliability
The on-orbit service tasks for aerospace mechanisms are complex, and numerous factors may influence the completion of tasks and the cost of a single task; therefore, these factors play a crucial role in the achievability and the service life of aerospace mechanisms. The analysis of the mapping relationship in the study by Gao et al. 20 shows that the influence factors and the control variables have no direct mapping relation. However, the control variables are directly related to the responding layer factors, and the influence factors can also directly affect the responding layer factors. Thus, the mapping relationship of the influence factors of operational reliability and the control variables can be raveled out through building the mapping relationship between the influence factors of reliability and responding layer factors and building the mapping relationship between responding layer factors and the control variables.
Control variables mean the variables that can be controlled directly. Specifically, control variables include joint angle, angular velocity, and joint torque in the operational process. The influence factors of operational reliability mean factors that influence the operational reliability during producing, assembling, and operating. It includes reduction in tooth thickness, bearing clearance, error of gear position, error of bearing motion, and so on. Responding layer factors are the connection between influence factors and control variables, which mainly include the velocity of end-effector, the abrasion, and the energy consumption.
Based on the above analysis, the operational reliability can be improved indirectly by optimizing the responding layer factors by adjusting control variables. On the premise that the path planning of obstacle avoidance is perfectly achieved, the operational cost should be reduced. In this process, the influence factors of operational reliability can be represented by bearing clearance, error of gear position, error of bearing motion, and so on. Meanwhile, the degradation of those factors can be represented indirectly by the factors at responding layer. Therefore, energy consumption of the manipulator, the velocity of end-effector, and the abrasion are selected as optimization objects.
The relationship between energy consumption and angular velocity is represented by the following equation

where
The minimum singular value of Jacobian can be used as an index to measure the upper bound of angular velocity

where σr
is the minimum singular value of the Jacobian.
The manipulability of manipulator is defined as the equation below.

where
In addition, the abrasion of joints will become severe, when the joint operates around the joint limit for long periods of time. Therefore, the joint angle should be kept far away from their limits during operations.
In conclusion, the minimum singular value of Jacobian, manipulability, and the distance to joint limits are used as the optimization objectives. The optimization is achieved by selecting specific configurations as the nodes of random tree in the planning process, which cannot only improve the operational reliability but also enhance combination with local obstacle avoidance algorithm.
The establishment of potential field for improving operational reliability
The establishment of potential field with the minimum singular value of Jacobian matrix
Decomposing the Jacobian matrix

where

Then, the

In the equation above, the term
To ensure manipulators have enough capacity to complete missions, the end-effector is expected to have adequate velocity in every direction during execution. However, it cannot satisfy the condition only restraining the minimum singular value σr
. The angular velocity limit in

The angular velocity limits of a 2-DOF manipulator. DOF: degree of freedom.
A 2-DOF manipulator is used to simplify the process of explanation. In Figure 1,
For a general manipulator, its angular velocity limits are almost the same, which means

where σr
is the minimum singular value of Jacobian;
In the case that the angular velocity limit of each joint is approximately equal and some singular values are much less than others,
Then, the expression of the potential field built with the minimum singular value is obtained.

where α
1 and β
1 are arbitrary positive numbers and E
1 is always greater than 0, which means the potential field only provides repulsive force. When
The establishment of potential field with considering manipulability
The concept of Directional Manipulability Constrained by the Condition Number (DMCCN) was proposed by Xie and Zhao, which used an optimization object on a path planning problem with a 3-DOF planar manipulator. 21 The directional manipulability have main influence in this index, if the condition number is relatively small. Meanwhile, the influence of directional manipulability decreased gradually with the increasing of condition number, and then the condition number will become dominant. The definition of DMCCN is shown as follows

where
There are two cases that make

where ω is the manipulability of manipulator,
The establishment of potential field with considering the joint limits
The end-effector can reach any target position in its workspace as long as its joints work in limits. The joints’ limits can be represented as follows

where

where
From the above expression,
The resultant potential field and its potential field of gradient
Those three potential fields are merged for the exploration of random tree in order to optimize the objective and the proportion of three potential fields can be achieved by adjusting

Then, the potential field of gradient is computed to transform the gradient calculation into query.

The discrete form of this expression is shown as

Obstacle avoidance path planning algorithm based on operational reliability
Symbols and functions used in this algorithm
Symbols
T represent the random tree, which is a collection of nodes. T contains several properties, which are shown as follows.
where d
1 is the distance between the end-effector of manipulator and the goal position at the current configuration; d
2 is the distance between the manipulator and obstacles; and

Methods
The algorithm procedure
The original RRT algorithm makes the manipulator sampled randomly in configuration space, which means reaching complete probability to find a path. RRT algorithm and its modified version can be divided into deterministic part and stochastic part.
On the one hand, the random tree is gradually approaching to the target position with deterministic exploration. On the other hand, the manipulator can bypass the obstacles to achieve the complete probability with stochastic exploration. The RRT algorithm is improved from two aspects in Berenson et al. 19 Firstly, the target position in Cartesian space, rather than goal configuration, is chosen as the target for exploration. For a redundant manipulator, there are several target configurations that the manipulator can reach, which makes solutions more diversified, so that the time consumption of path planning is shortened. Secondly, this algorithm is based on a heuristic exploration strategy. Not only the distance to the target position, but the distance between manipulator and obstacles is considered when picking out a node to explore, which provide the algorithm capacity to plan a more clearance path. The result of the experiment also demonstrates that this algorithm can provide a relatively high quality path with high efficiency.
Based on the above analysis, the frame used in the study by Bertram et al. 17 is improved by our algorithm. A potential field for optimizing operational reliability and kinematic performance built in “The establishment of potential field for improving operational reliability” section is introduced in this frame. Meanwhile, a collision detection strategy based on KNN algorithm is the reference for accelerating the algorithm further. Similarly, the improvement of the frame can also be analyzed from deterministic part and stochastic part. The flowchart of the algorithm is shown in Figure 2.

The flowchart of our modified algorithm.
The deterministic exploration is marked as case 1 in our algorithm. Its purpose is to ensure the manipulator explore toward target position. Firstly, a node is randomly picked out from random tree T according to their rank. A higher rank implies that the manipulator has a closer distance to target position and has a relatively long distance to obstacles; secondly, the selected node is explored in a random direction or in the direction of potential field gradient. The sampling interval of the potential field cannot be too small, in order to ensure efficiency of our algorithm. If the gradient descent is used when the manipulator is close to target position, the manipulator may oscillate repeatedly around the target position. Therefore, only when the manipulator is relatively far from goal position, the direction of gradient is explored. Finally, the Cartesian distance between manipulator and goal position is used as a rejection rule to ensure that the manipulator approaches the target position after every expansion process. The d 3 in the algorithm is the minimum step of exploration. The pseudo-code of case 1 is shown as follows:

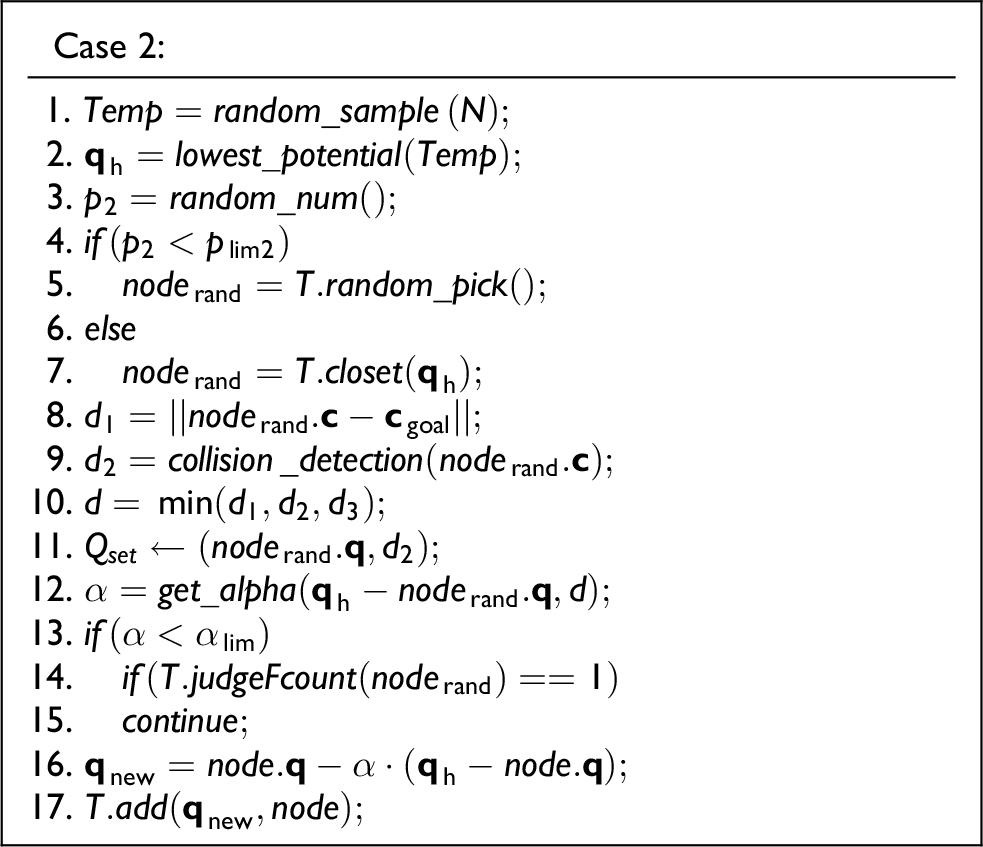
With stochastic exploration, the manipulator can achieve the complete probability to bypass the obstacles. The stochastic exploration is marked as case 2. Firstly, random sample is taken n times in configuration space to select the configuration
In addition, a collision detection strategy based on KNN is integrated with our algorithm. In the strategy proposed by Pan and Manocha, 22 the hash value and the collision state of every configuration node is recorded. After enough samples are collected, the KNN is used to estimate the collision state of new samples.
As for the characteristic of our path planning algorithm, the collision detection strategy is modified to adapt our method. The minimum distance between manipulator and obstacles is recorded instead of collision state, so that the strategy has the capacity to estimate the distance. The concrete modification is introduced at “The KNN-based collision detection strategy” section.
Then, the whole process of our obstacle avoidance path planning algorithm can be shown as follows:

Some key methods:
The
This method is used to judge whether the



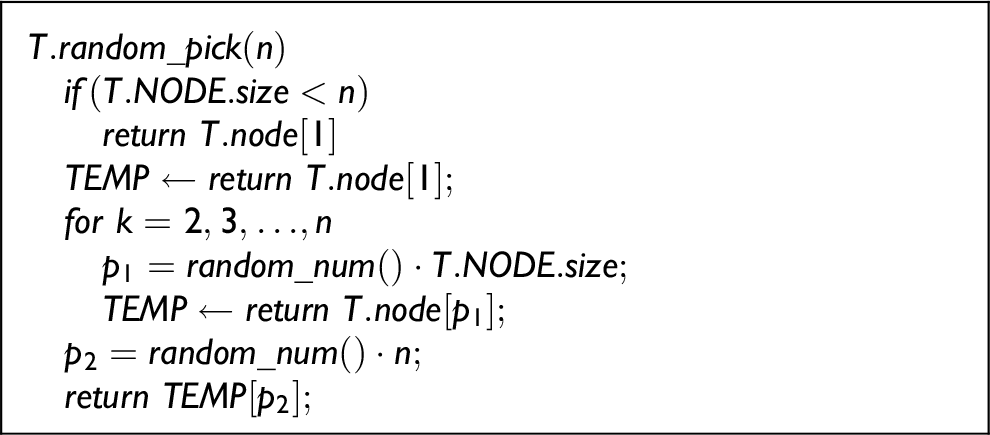
This method is used to randomly select a node to explore. Firstly,
The KNN-based collision detection strategy
Traditional strategy of collision detection indicates it will be executed after every exploration in RRT and PRM algorithm to ensure the new configuration is not collided. A KNN-based collision detection strategy is proposed in 2016 by Pan et al., which is used to estimate the collision state of new samples according to the result of previous query. The number of exact detection executed is decreased through this strategy, which makes the algorithm more efficient. The flowchart of this strategy is shown in Figure 3.

The flowchart of the KNN-based collision detection strategy. KNN: K-nearest neighbor.
Firstly, the nodes in
In our algorithm, the step of exploration is calculated through the distance between manipulator and obstacles, which is obtained by the collision detection. Thus, following changes are made: Firstly, the minimum distance between manipulator and obstacles instead of the collision state is recorded. It is used to estimate the distance at new sampled configurations. Secondly, in the recording process, the distance is recorded in Thirdly, the ambiguity rejection rule in original algorithm is to ensure the security of manipulator when it is in a critical collision state, which decreases the efficiency of the method. In our algorithm, the estimation process is executed only when the distance between manipulator and obstacles is above its threshold. In this way, the security of manipulator can also be preserved.
Experiments
Kinematic model of the research object
An 8-DOF manipulator is used to verify the effect of our algorithm. The manipulator and its Denavit-Hartenberg (DH) coordinate system are shown in Figure 4.
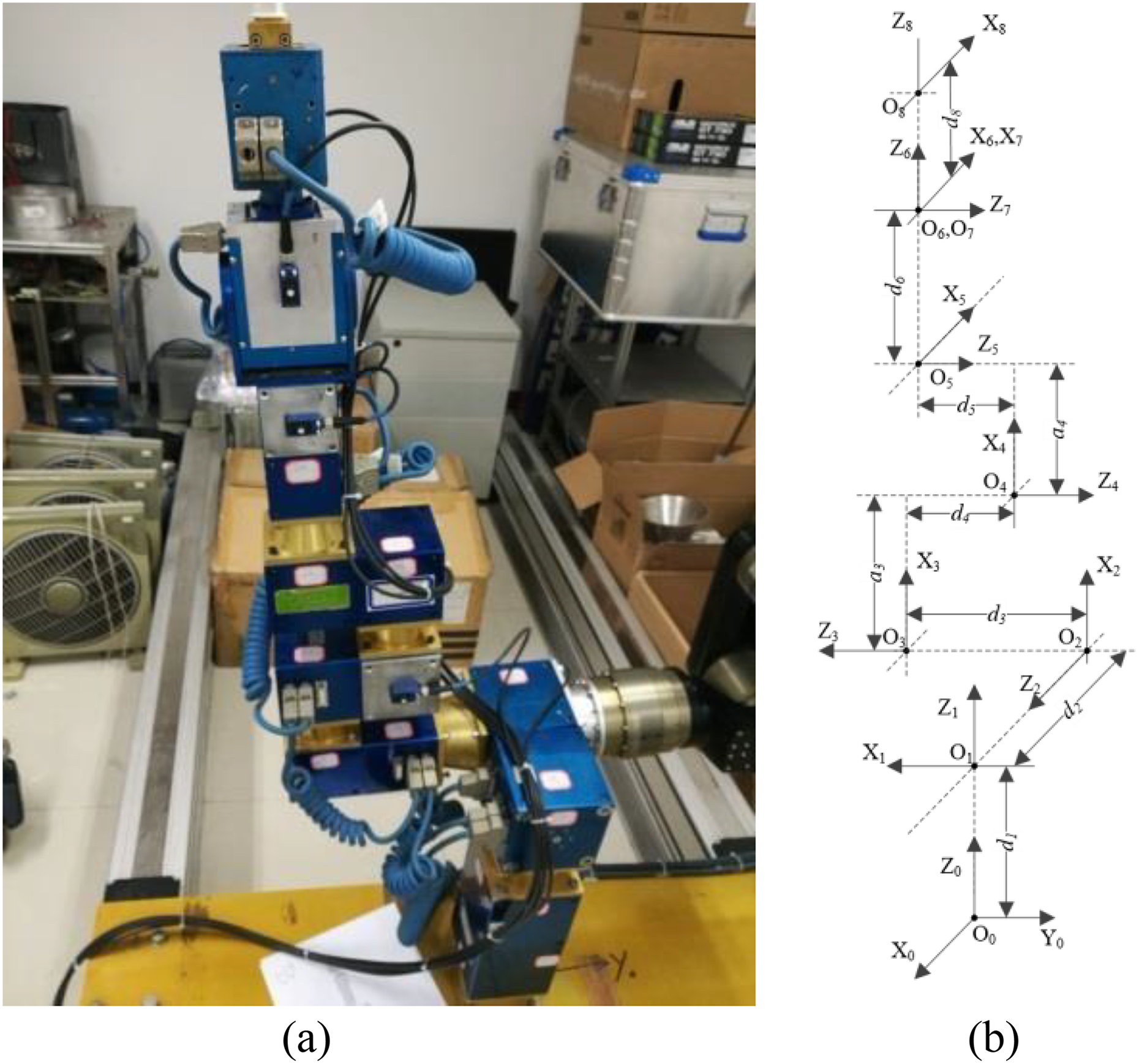
(a) The research object. (b) The DH coordinate system of the manipulator.
The DH parameter of the manipulator is shown in Table 1.
DH parameters of the 8-DOF robotic manipulator.
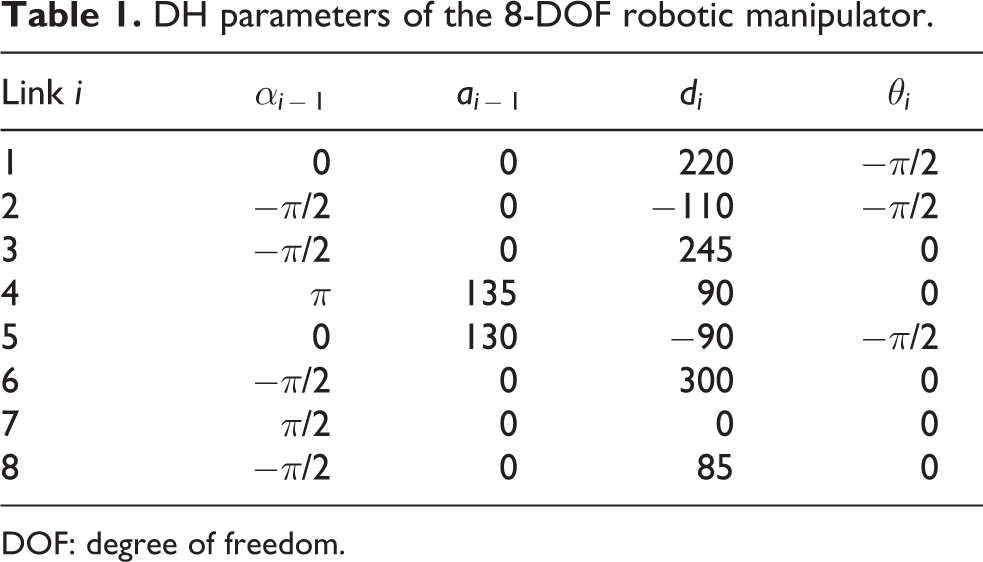
DOF: degree of freedom.
The physical meaning of the four parameters in the table is as follows:
The transformation
The lower limits and upper limits are shown as follows

In the following experiments 1 and 2, both the proposed algorithm and the original algorithm are written by VS2013, and the visual simulation is exhibited by Matlab R2016b.
The experiment results and analysis
Experiment 1
The first experiment is to verify the obstacle avoidance capacity of the algorithm. The environment condition of experiment 1 is shown in Figure 5. Three initial configurations are tested and results are shown as follows:

Environment condition in experiment 1.
The initial configuration I of the manipulator is

The target position is
The trajectory planned by our algorithm is shown in Figure 6.

The trajectory planned by the modified algorithm in configuration I.
The initial configuration II of the manipulator is

The target position is
The trajectory planned by our algorithm is shown in Figure 7.

The trajectory planned by the modified algorithm in configuration II.
The initial configuration III of the manipulator is

The target position is
The trajectory planned by our algorithm is shown in Figure 8.
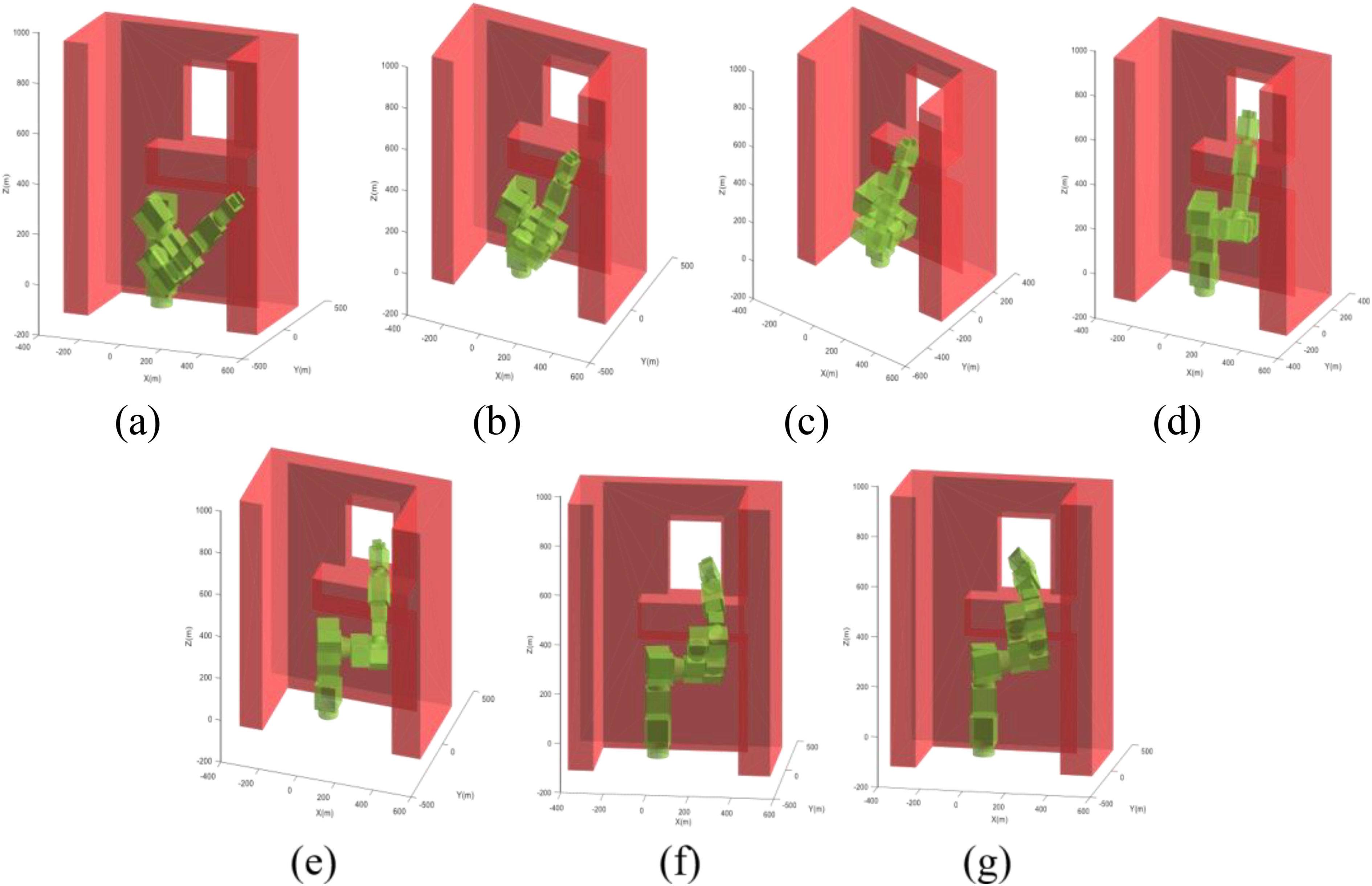
The trajectory planned by the modified algorithm in configuration III.
Figures 6 to 8 show that the modified algorithm has the capability to plan an obstacle-free path from initial configuration to the target position. Meanwhile, the distance between the manipulator and obstacles always maintain safety, which illustrates the efficiency of the proposed algorithm.
Experiment 2
In the first experiment, the obstacle has a strong constraint on the manipulator, so that the path is relatively simple and the optimization effect is not obvious under the circumstance while the second experiment is simplified on the basis of the former to prove its optimization ability. The condition of the second experiment is shown in Figure 9.

Experiment condition of the path planning problem in experiment 2.
The second experiment is to compare the kinematic performance, the distance to angular limits, and the time consumption between the proposed algorithm and the original algorithm. Fifteen groups of experiments are carried out to analyze the result. The environment condition is shown in Figure 7, and the initial configuration of the manipulator is set as

The comparison for kinematic performance is spread from three aspects

where Obj1 represents the capacity to produce velocity of the end-effector in the direction that has the least capacity to generate velocity. The lower the value, the more capacity the manipulator has.

where Obj2 represents the mean value of manipulability on every node and

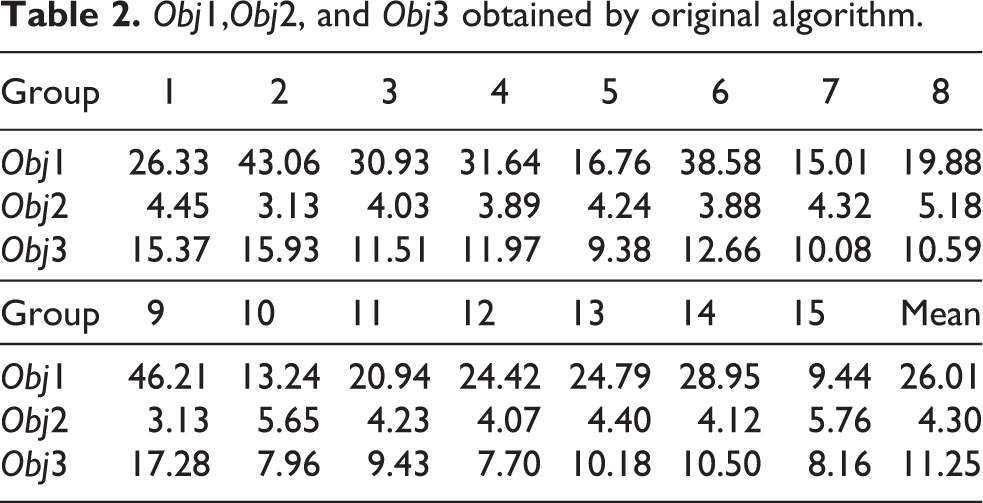
where Obj3 represents the mean value of condition number of manipulator on every node, which can seem as a supplement to Obj2.σm and σr represents maximum singular value and minimum singular value of the Jacobian matrix, respectively. The result obtained by original algorithm is shown in Table 2.
Obj1,Obj2, and Obj3 obtained by original algorithm.
The result obtained by the modified algorithm is shown in Table 3.
Obj1,Obj2, and Obj3 obtained by modified algorithm.
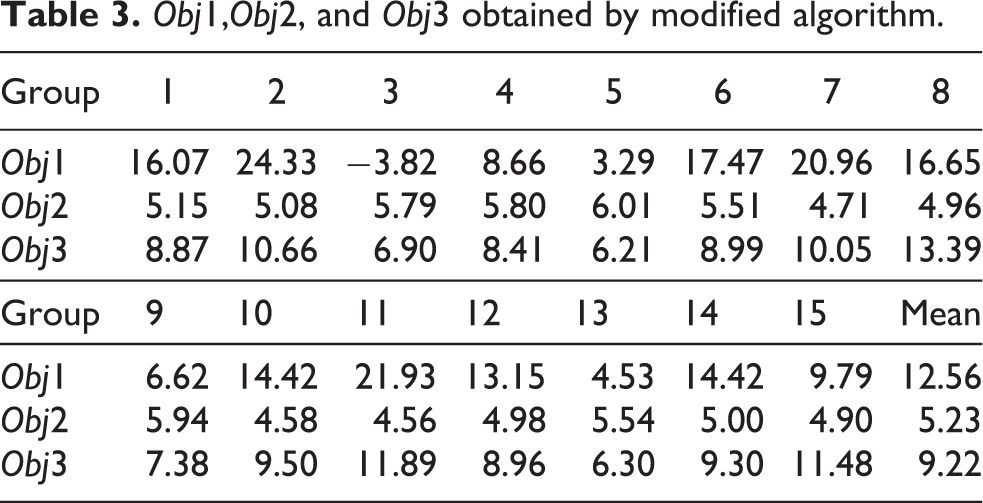
The result of experiment demonstrated that the algorithm proposed in this article has an obvious optimization effects compared with the algorithm by Bertram et al. 17
Figure 10 integrates the data in Tables 2 and 3, and a scatter plot is shown as follows:

Obj1,Obj2, and Obj3 obtained by original algorithm and modified algorithm.
As is shown in Figure 10, the data obtained by original algorithm gather in the upper right corner, that is, Obj2 is relatively small while Obj1 and Obj3 are relatively large. On the contrary, the data obtained by modified algorithm perform better.
According to the meaning of this value, it’s obvious to find out that those three indexes are optimized by our algorithm simultaneously.
The comparison between Tables 2 and 3 shows the mean values of Obj1, Obj2, and Obj3 obtained by original algorithm are 26.01, 4.30, and 11.27, respectively, while that obtained by our algorithm in the same experiment condition are 12.56, 5.23, and 9.22. Obj1 decreases by 13.45, which means that the manipulator has a preferable capacity to produce a higher velocity. Obj2 increases by 0.93, while Obj3 decreases by 2.05, which means the manipulator has a balanced motion capacity in every direction.
As for the joint limits, its indicator is shown as the following equation

where
The distance to angular limits by original algorithm.

The distance to angular limits by modified algorithm.

The above data can be arranged by the following scatter plot (Figure 11).

The distance to angular limits by original algorithm and modified algorithm.
It is obvious that the index M obtained by the original algorithm is relatively small, especially in group 3, 7, 11, 12, and 14 where its value is close to zero while the index M obtained by our algorithm is relatively small only in group 9, 11, 12, and 13. Meanwhile, it is still abundant for the distance to angular limit. Moreover, the mean value of M obtained by our algorithm is much higher than the former. From the analysis above, our algorithm has an obvious optimization effect compared with the original algorithm.
In addition, the results of time consumption obtained by original algorithm and our algorithm are shown in Tables 6 and 7, respectively. The scatter plot is shown as follows (Figure 12). The abscissa presents the number of exploration and the ordinate presents the number of exploration per second.
The time consumption by original algorithm.

The time consumption by modified algorithm.


The relationship between exploration efficiency and exploration number.
From the above chart and the comprehensive analysis before, compared to the original algorithm, this study optimizes, and meanwhile the exploration efficiency is even better. On the other hand, as the collision detection strategy based on KNN plays an important role in collision detection stage, the path planning efficiency increases with the increase of the number of expansion, which remains a better performance even in a relatively complicated condition.
Conclusion
In order to optimize kinematic performance of space manipulator, an RRT optimization algorithm for space robotic manipulators guided by obstacle avoidance independent potential field is proposed in this article. In the process of path planning, this algorithm aims to reduce the operational cost of the manipulator and improve the flexibility of the end-effector. The artificial potential field is established off-line by three indexes, that is, including the velocity limit of joint minimum singular value of the Jacoby matrix, the manipulability, and the distance to joint angular limits. The result shows that the algorithm can effectively plan an obstacle free path. Moreover, the manipulator can always maintain a safe distance from obstacles. Meanwhile, the path has a stronger ability to produce the end-velocity. The same end-velocity can be generated by smaller joint angle than former algorithm. On the one hand, it reduces the energy consumption and decreases the abrasion of the manipulator in a certain extent, which ensures long-term and normal operation for space agencies. On the other hand, the manipulator has a better motion performance and a higher flexibility of the end-effector, which ensures the ability of the manipulator to respond sudden situations during the movement process. In addition, the collision detection strategy based on KNN guarantee the efficiency of the algorithm.
Future work
There are different types of potential field that optimize the motion performance. This article only chooses the minimum singular value, the manipulability, and the distance to joint angular limits to build up the potential field. Whether there is a better potential function remains to be further researched. Meanwhile, on account of the complexity and diversity of the abrasion, how to consider its influence comprehensively is another direction to study in the future.
What’s more, it is possible for redundant manipulators to complete a given task while one or some joints fall into a complete joint failure. The development of the control strategies for under-actuated manipulators can improve the reliability of fully-actuated manipulators in the event of a drive failure. Therefore, the obstacle avoidance path planning method in under-actuated condition also requires further research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by Key Project of Chinese National Programs for Fundamental Research and Development (973 program) (no. 2013CB733000), National Natural Science Foundation of China (no. 61573066), and National Natural Science Foundation of China (no. 61403038).