
Abstract
A nonlinear robust control method for the trajectory tracking of the underwater vehicle and manipulator system that operates in the presence of external current disturbances is proposed using double closed-loop integral sliding mode control. The designed controller uses a double closed-loop control structure to track the desired trajectory in the joint space of the underwater vehicle and manipulator system, and its inner and outer loop systems use integral sliding surface to enhance the robustness of the whole system. Then, the continuous switching mode based on hyperbolic tangent function is used instead of the traditional discontinuous switching mode to reduce the chattering of the control input of the underwater vehicle and manipulator system. In addition, the control method proposed in this article does not need to estimate the uncertainties of the underwater vehicle and manipulator system control system through online identification, but also can ensure the robustness of the underwater vehicle and manipulator system motion control in underwater environment. Therefore, it is easier to be implemented on the embedded platform of the underwater vehicle and manipulator system and applied to the actual marine operation tasks. At last, the stability of the control system is proved by the Lyapunov theory, and its effectiveness and feasibility are verified by the simulation experiments in MATLAB software.
Keywords
Introduction
The underwater vehicle and manipulator system (UVMS) is a relatively efficient and advanced underwater working tool, which can be applied to underwater tasks such as offshore oil and gas exploration and deep-sea scientific investigation. 1,2 When the UVMS performs high-precision underwater operations, precise control of the position and orientation of the end-effector is important, and the position and orientation of the end-effector are in turn dependent on the orientation and position of the underwater robot and the joint position of the underwater manipulator. Therefore, the efficiency of the ocean operation of the UVMS is vastly contingent on the control effect of the trajectory tracking of its joint space. However, the complex marine environment and the physical structural characteristics of UVMS pose several difficulties for the robust control in its joint space.
The dynamic model of the UVMS has serious high-order nonlinearity and strong uncertainty. At the same time, when it is moving, it will also suffer from external current disturbances, which makes it difficult to meet the expected requirements of control accuracy. Therefore, an efficient and robust tracking control algorithm is required to resolve the problem of UVMS tracking control in complex underwater environments. Nonlinear robust control is to design a fixed controller which can make the nonlinear system with uncertainties achieve the expected performance. The classical robust controllers include
Some control schemes appear in the following literature. In Esfahani et al., 20 a proportional–integral–derivative control method combining time delay estimation (TDE) and terminal sliding mode (TSM) technology for the UVMS motion control scheme was developed, and simulation experiments proved that this method could not only obtain higher trajectory tracking accuracy but also had better robustness. Zhou et al. 21 proposed a robust Kalman filter (KF) algorithm with long short-term memory to estimate the filtering gain error, state estimation error, and the observation error of an image-based visual servo control system so that the whole system anti-interference capability can be enhanced. Yong and Shuanghe 22 proposed an adaptive control method, which was made up of an estimated compensation term based on extended Kalman, a calculated torque term based on the detailed model information, and a robust compensation tracking term. The control method can meet the task requirements of UVMS in convergency rate, tracking precision, and interference rejection. In the literature above and in the study by Londhe et al., 23 Patre et al., 24 and Yang and Jin-Kun, 25 KF and other observers are used to estimate the external disturbances and other uncertainties of the plant. However, due to the small communication bandwidth of UVMS and the limited computing capability of its embedded platform, these methods are not suitable for UVMS working in actual underwater environment.
With the rapid development of artificial intelligence, several scholars have tried to apply more intelligent methods to the motion control of robots. 26 –30 Xu et al. 31 proposed a new type of robust control method, constructing sliding mode surface function to control the tracking error of UVMS and adjusting the gain of the nonlinear control based on the fuzzy control method. In addition, the fuzzy logic is employed to regulate the controller’s gain in real time, so that the controller does not need an accurate UVMS dynamic model, and ensures excellent tracking quality and stability with external current disturbances. Xu et al. 32 designed a fuzzy proportional–derivative (PD) controller based on neural network compensation for UVMS motion control. The controller consists of a fuzzy PD control term and a neural network estimation term: the gain of the PD control term is adjusted online by fuzzy logic, and the neural network compensation term estimates the dynamics of UVMS in a decentralized manner. Because the controller adopts a decentralized design method, the controller has considerable accuracy and is robust to changes in payload and hydrodynamic disturbance. In Zhou et al., 33 the scheme of sliding mode control (SMC) based on extreme learning machine was proposed to improve the control accuracy of a manipulator and addressed the external interference and uncertainties. Sami et al. used adaptive control method and artificial potential field method to design a complete UVMS formation navigation, guidance and control. At the same time, distributed and concatenate computation structure for the UVMS navigation as well as guidance controllers and path following controllers was adopted. The results of simulation experiments show that the designed controller can still achieve great performance in the presence of current disturbances. 34 These methods mentioned above can achieve satisfactory results on other types of robot platforms or theoretically resolve the motion control problem of UVMS under current disturbances. However, due to various uncertainties including unknown dynamics and external disturbances in UVMS, online learning and training to estimate these uncertainties will not only bring a heavy burden to the whole control system and affect the real-time performance of UVMS control, but it will be also difficult to realize on embedded platform with weak computing capability of UVMS.
The methods proposed in the above literature are mainly to realize the UVMS motion control by a combination of online identification of the unknown dynamics of UVMS and external current disturbances and nonlinear control. However, due to the weaker underwater communication capability of UVMS and the limited computing power of its embedded platform, these algorithms that need to occupy a large amount of computing resources are quite difficult to run on the embedded system of UVMS, which is also difficult to be used in tracking the expected trajectory of the UVMS in the practical ocean environment. The SMC method is able to suppress the dynamic uncertainty of the controlled object through the high-gain switching without the additional online parameter identification for the controlled object. For example, Kim et al. developed a tracking control method-based sliding mode for a UVMS whose inertial information was unknown. 35 But the severe switching, especially in the underwater environment with strong uncertainties, brings the problem of the violent chattering of the control input of the UVMS in simulation results. To solve the above problems and ensure that the UVMS control system acquires the superior tracking performance, compared with traditional SMC, this article employs a double-loop control structure to achieve the simultaneous tracking of the desired trajectory and its derivative of the UVMS as well as improve its dynamic property. Additionally, the integral sliding is adopted in inner loop and outer loop system for enhancing the robustness of the whole control system. The continuous switching mode based on the hyperbolic tangent function, meanwhile, is adopted to take place of the ordinary discrete switching mode for the sake of reducing the chattering within the control input. Eventually, the stability of the whole control system is verified using Lyapunov direct method. The robust control method proposed in this article does not need to identify the unknown dynamics of UVMS online. At the same time, the controller can be designed based on an inaccurate mathematical model and rely on the robustness of the controller itself to resist ocean current disturbances. Therefore, compared with those methods that need online estimation of unknown uncertainties of the UVMS, the computational complexity has been greatly reduced, and it is more convenient to run on the UVMS embedded platform. The results of simulation experiments have verified the effectiveness and feasibility of the proposed method under external current disturbances.
The article is organized as follows: the problem statement and several useful assumptions and lemmas are presented in the second section. The main results of the article are presented in the third section. In the fourth section, simulation results are given and analyzed. At last, the conclusions are acquired in the fifth section.
Problem statement
The conceptual diagram of the UVMS studied in this article is shown in Figure 1. The UVMS is a composite system consisting of a 6-degree of freedom (DOF) autonomous underwater vehicle (AUV) and a 4-DOF underwater manipulator, the dynamic equation and kinematic equation of the UVMS can be described by



Inertial coordinate and vehicle coordinate of the UVMS. UVMS: underwater vehicle and manipulator system.
The process of calculability of its kinematic equation and dynamic equation is able to be clearly known in Sarkar and Podder.
36
Where
An underactuated AUV is used in this article. The structural design and configuration of buoyant materials for the AUV can make its buoyant surmount its barycenter, which is capable of generating an equal amount of righting moment in its rolling direction. However, this moment is limited. When the first rotating joint of the underwater manipulator moves, it will generate an interference moment in the rolling direction of the AUV. Moreover, when this interference moment exceeds the recovery moment generated by the AUV, the AUV is likely to have a rollover accident, affecting the overall operation of the UVMS. Therefore, this article keeps the first rotating joint always at rest and the second joint and third joint of the underwater manipulator merely move on the vertical plane of the AUV. Now hence, merely two swing joints in the vertical plane are taken into account here and the overall simplified mathematical model of the UVMS is capable of being represented as

where
The UVMS dynamics model in an ideal underwater environment satisfies
1. The inertia matrix of the UVMS dynamic model satisfies

2. And it also satisfies

where
3.

Lemma I
For any function

Lemma II
For any given

Lemma III
For any

where
Assumption I
The desired trajectory of the UVMS and its derivative and second derivative (
Assumption II
The joint space variables signals of the UVMS and its derivative signals can be obtained in real time through the sensors equipped with the UVMS.
Assumption III
The external disturbances and other unknown dynamics of the simplified UVMS model are bounded, which satisfies

Control design
The SMC variable structure control in theory is a new type of nonlinear control strategy. After nearly 50 years of development, it has become an important branch of modern control. Additionally, it has the advantages of robustness to matching uncertainty and disturbance, fast response capability, simple structure, and easy implementation. Therefore, it has been paid attention to in the early stages of its theory and has been widely used in the robot control.
A robust method of the tracking control of the desired trajectory of the UVMS is studied in the section. When the UVMS works in a complex underwater context, if the ordinary sliding mode UVMS controller is adopted, the relatively large switching gain will be required to resist the external current disturbances and other unknown dynamics of the UVMS dynamic equation, which will cause the chattering problem in the control of the UVMS. Further, the severe chattering of the control input may damage the UVMS actuators, resulting in the UVMS being unable to complete underwater tasks. To ensure the robustness and accuracy of the UVMS control system and reduce sliding mode chattering, hence a controller based on double closed-loop integral sliding mode is designed. To heighten the robustness of the entire control system, an integral sliding mode surface is employed to replace the ordinary sliding mode surface, and the original state of the integrator is computationally set so that the system’s state lies on the designed sliding mode surface in the beginning. In addition, to mitigate the chattering during the UVMS control, a continuous switching mode based on the hyperbolic tangent function is adopted to take the place of the traditional discrete switching mode. In this article, the control system of the UVMS consists of two closed loops, and the virtual speed and the tracking errors of joint space variables of the UVMS are the import and export of the outer loop. The control input and the tracking errors of the virtual speed, meanwhile, are the import and export of the inner loop. This control strategy is able to realize the simultaneous tracking of the expected trajectory and its virtual speed of the UVMS.
Design of outer loop SMC law
The outer loop of the control system of the UVMS is used to track the desired trajectory of the UVMS, where
The integral sliding mode function of the outer loop of the UVMS controller is denoted by

where
The derivative of equation (11) can be written as

The outer loop control law is designed as

where
Considering the outer control law in equation (13), the derivative of the integral sliding mode function can be converted to

And consider the following Lyapunov control function

Taking the time derivative of equation (15) along with equation (14), one obtains

To stabilize equation (16) and ensure that it is negative semidefinite, it is vital to drive
Design of inner loop SMC law
The inner loop system is developed to track the virtual speed of the control system of the UVMS, where
Then, the vector of errors between the virtual speed and the actual speed variables of joint space of the UVMS is described by

Substituting equation (17) into equation (3), it is obtained as

Then, the inner loop integral sliding mode function is chosen as

where
Further, the time derivative of sn is expressed as

Substituting equation (3) into equation (20), it can be obtained as

Then, inner loop control law can be expressed as

where
Substituting the controller equation in (22) into the time derivative of the inner loop integral sliding mode function in (21), it can be obtained as

Further, Lyapunov function is selected to prove the inner loop system’s stability, which is expressed as

Differentiating Vn with respect to time yields

where
Then,
Within the double-loop control of trajectory tracking of the UVMS, the dynamic and steady-state quality of the inner loop can easily influence the tracking effect and the stability of the outer loop. To ensure that the inner loop system has a faster convergency speed than the outer loop system, thereby improving the stability of the system,
Optimization of integral sliding mode controller
The ordinary SMC usually ensures the robustness of the entire system through the high-gain switching. The UVMS usually operates in a complicated ocean context, and its dynamic model has great uncertainty. If the above-mentioned ordinary switching function is used to overcome its uncertainty, the change of the switching gain will cause severe chattering. In this article, the above-mentioned robust tracking control method is improved, and the continuous switching method based on the hyperbolic tangent function takes place of the ordinary discrete switching mode, which availably is capable of alleviating the sliding mode chattering during its control process and drive the control input smoother.
The new switching function is denoted by

where ε determines how fast the point of the inflection of the curve of the function above varies.
The improved sliding controller can be easily designed

According to the inequality in Lemma III, we have

Further,

Then, consider the Lyapunov function as follows

Differentiating Vn with respect to time yields

where
According to the inequality in equation (31), we can easily get
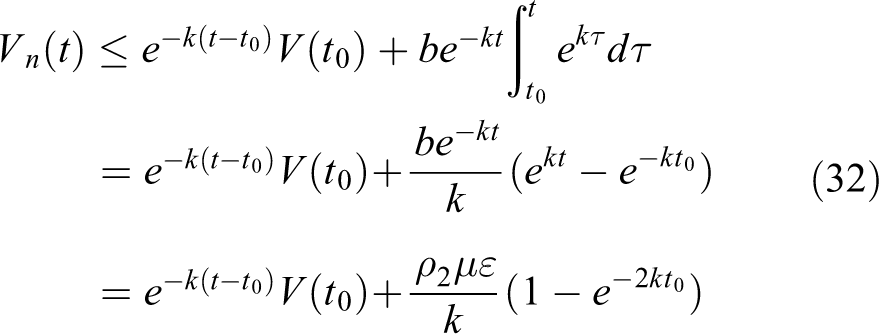
where
Simulation analyses
In this section, for the sake of verifying the validity and robustness of the developed UVMS controller, two groups of simulation tests are conducted, one adopting the ordinary sliding mode controller as well as the other adopting the control method proposed in the article. Afterward, the actual UVMS studied in this article is depicted in Figure 2. The AUV is torpedo-shaped, which is driven by the propellers and rudders together. The detailed model parameters of the AUV exist in Table 1. In the meantime, the link mass of the postbrachium link of the underwater manipulator is

A small UVMS composed of an AUV and an underwater manipulator. UVMS: underwater vehicle and manipulator system; AUV: autonomous underwater vehicle.
The detailed model parameters of the AUV.

AUV: autonomous underwater vehicle.
The AUV moves on the horizontal plane, and its expected trajectory on the horizontal plane can be expressed

The common sliding mode controller and its related parameters are arranged as follows
The sliding mode controller is represented as

The control parameters can be selected as

Original state of the control system is set as follows:
The relating parameters of the controller designed in this article are arranged as follows
Original state of the control system is set as follows:
The relative parameters controller designed in this article are selected as

The simulation results are demonstrated in Figures 3 to 10. From current experimental results, the robust tracking scheme for the UVMS developed in this article is appropriate for the trajectory tracking in the complex underwater context, which manifests its excellent quality as well as viability.
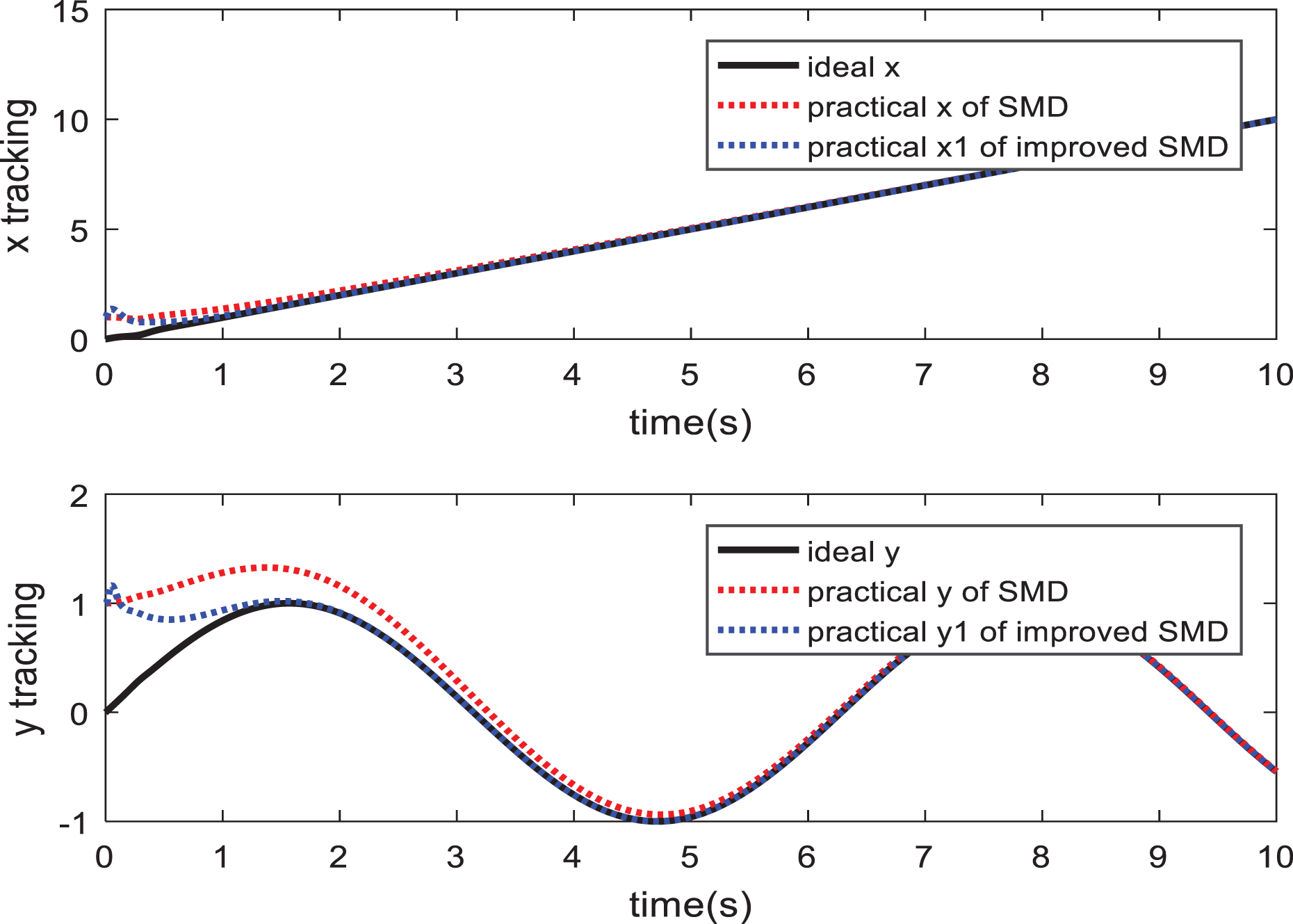
Position tracking of the AUV. AUV: autonomous underwater vehicle.

Position tracking errors of the AUV. AUV: autonomous underwater vehicle.

Orientation tracking of the AUV adopting SMD. AUV: autonomous underwater vehicle; SMD: sliding mode data.

Orientation tracking of the AUV adopting improved SMD. AUV: autonomous underwater vehicle.

Orientation tracking errors of the AUV. AUV: autonomous underwater vehicle.

The vertical rubber angle output of the AUV. AUV: autonomous underwater vehicle.
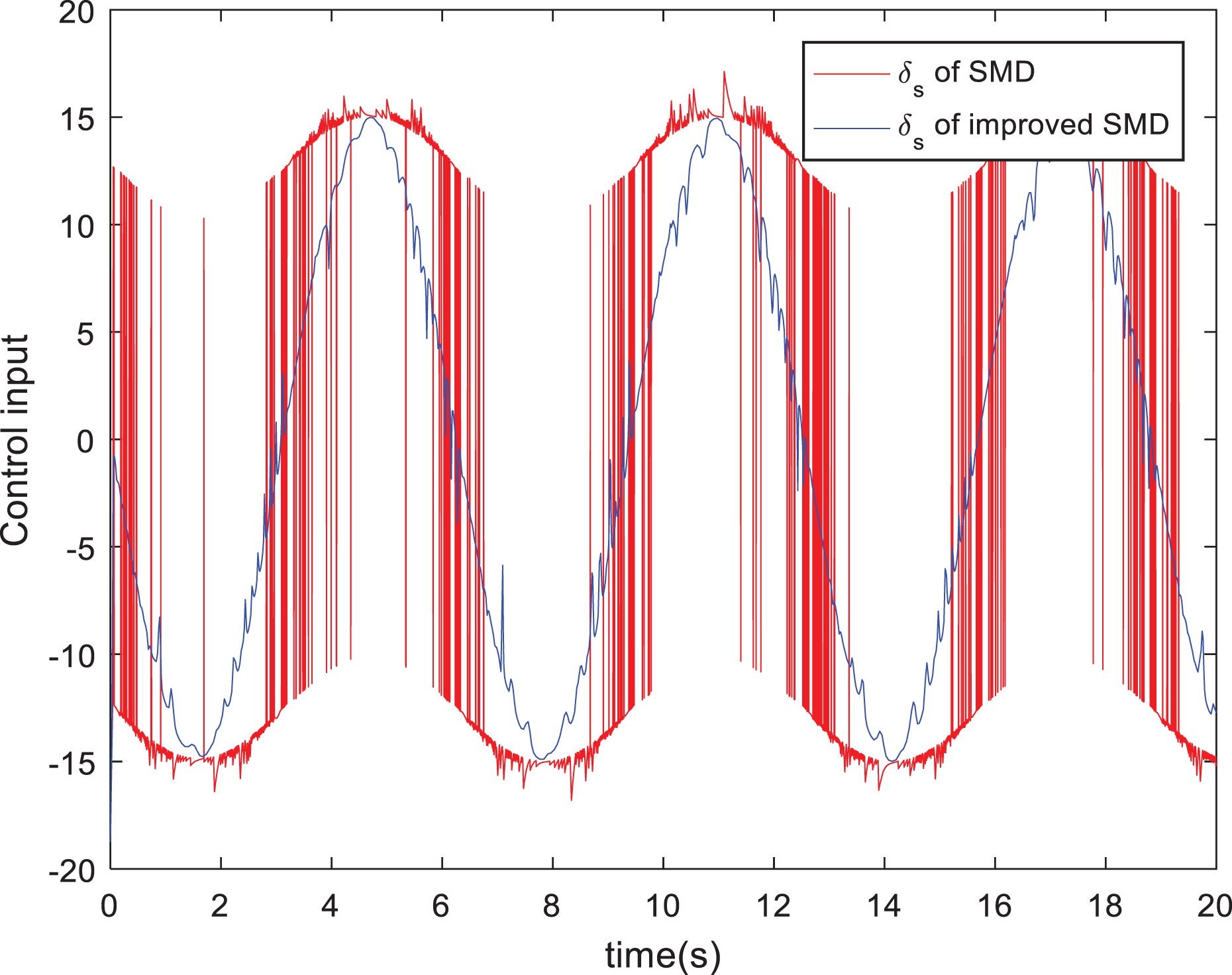
The horizontal rubber angle output of the AUV. AUV: autonomous underwater vehicle.
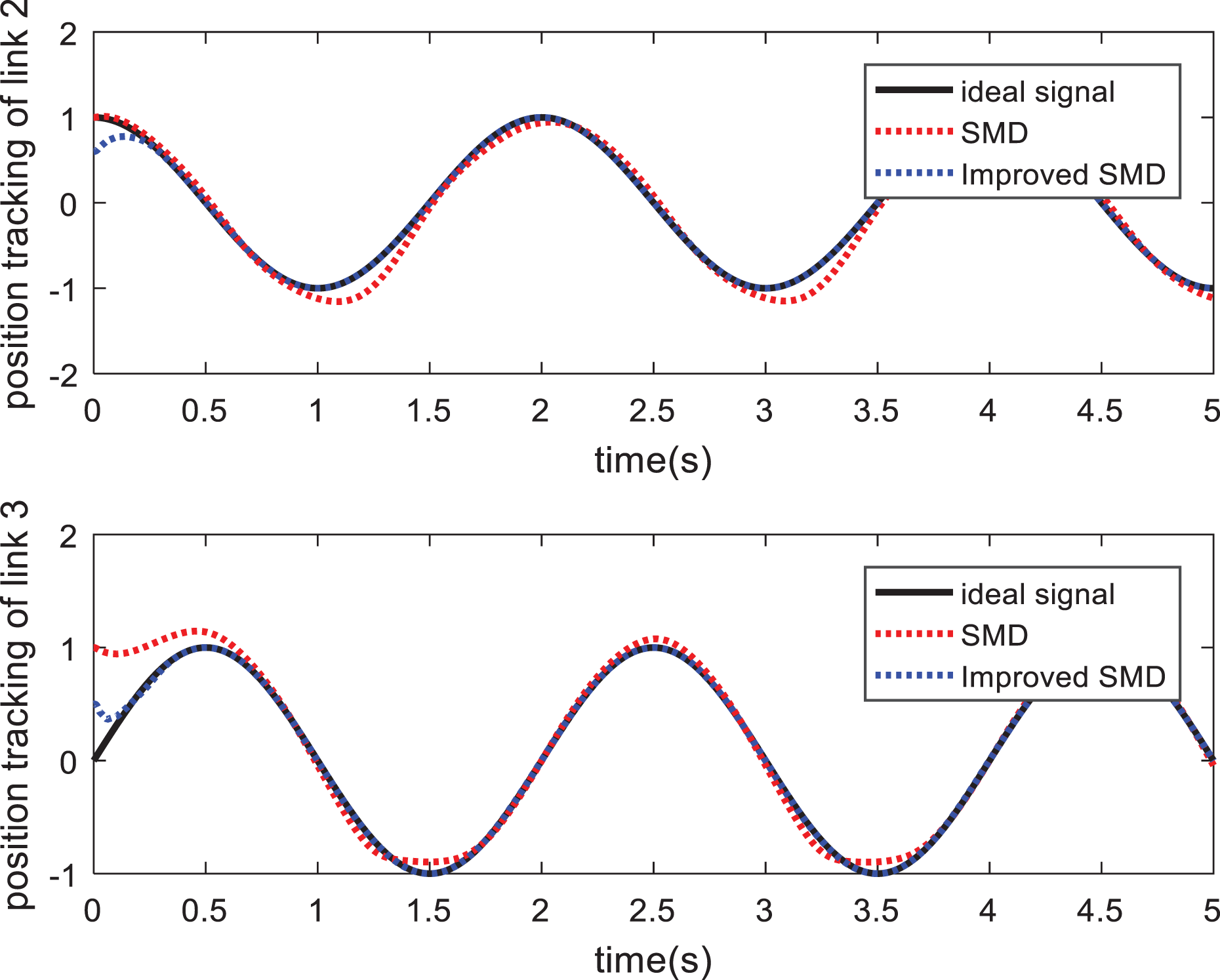
Joint angle tracking of the underwater manipulator.
The results of the simulation experiments in MATLAB for tracking expected trajectory of the AUV are plotted in Figures 3 to 9. In Figures 2 and 3, along with current disturbances, the AUV using a common sliding mode controller is able to track the expected trajectories in the x- and y-directions at approximately 7.5 and 7 s. Accordingly, with the robust controller developed in the article, the AUV is capable of tracking the expected trajectory in the x- and y-directions at about 1.5 and 2 s. Moreover, the AUV’s heading angle tracking effect of the robust controller designed in this article is smoother than that of a common sliding mode controller when turning. Hence, the proposed controller has better dynamic quality than ordinary sliding mode controller. Importantly, the chattering of the improved sliding mode controller developed in the article is indeed reduced.
The results of the simulation experiments in MATLAB for tracking expected trajectory of the underwater manipulator are shown in Figures 10 to 13. In Figures 10 and 11, the expected trajectory and actual trajectory of the underwater manipulator are displayed. In presence of current disturbances and unknown dynamics, the common sliding mode controller owns substantial tracking errors within the course of controlling the joint angles of the underwater manipulator. At the same time, the tracking errors vary in the interval [−0.3, 0.1]. But the robust controller makes the second and third joint of the underwater manipulator owns preferable dynamic quality, together with smaller tracking errors, and its control input gets indeed smoother.

Joint angle tracking errors of the underwater manipulator.

The control input of the underwater manipulator adopting SMD.
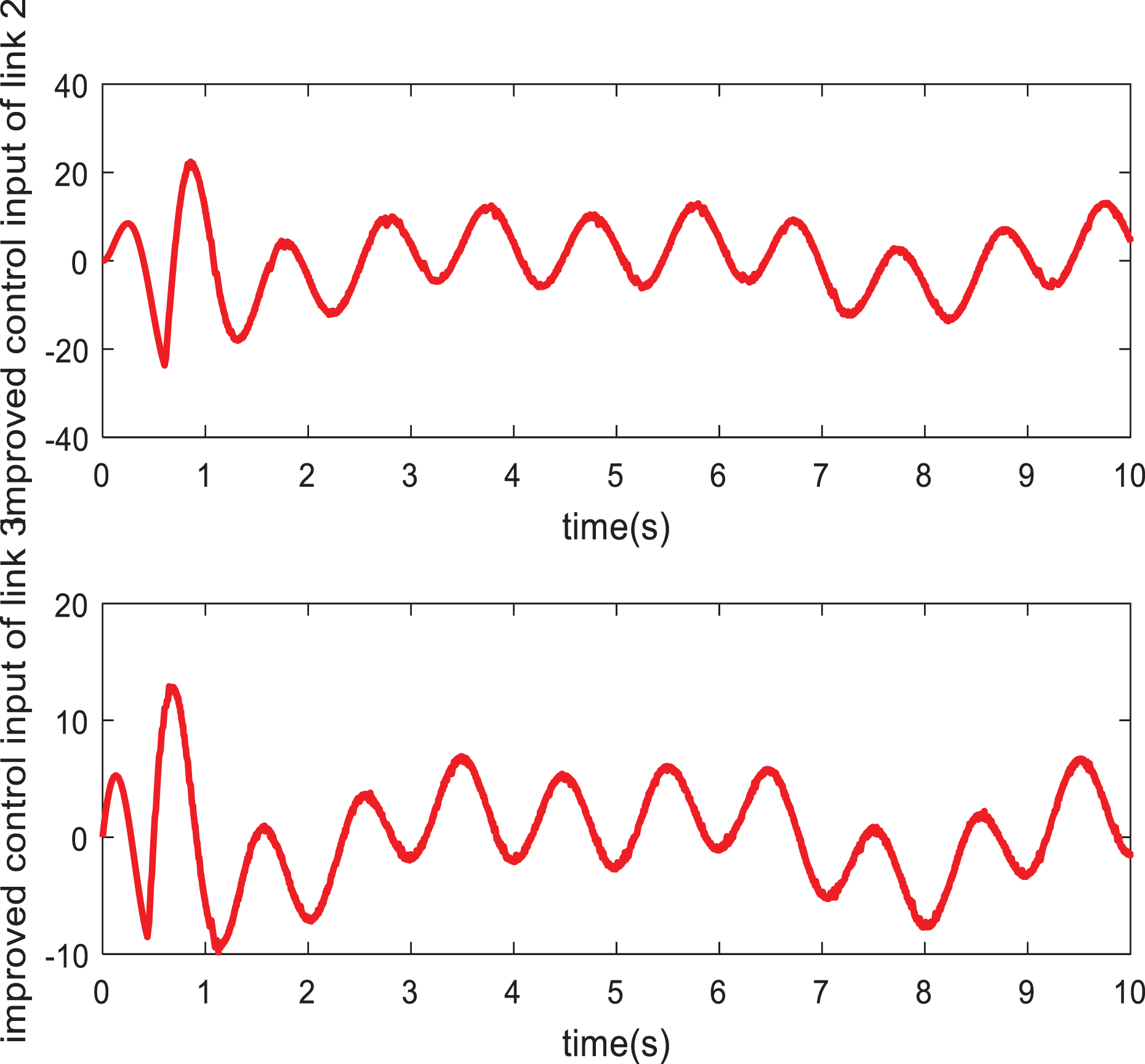
The control input of the underwater manipulator adopting improved SMD.
Generally, the robust tracking control method of the UVMS that proposed in the article is able to attain the anticipant tracking performance and efficaciously restrain external disturbances. Additionally, the chattering of the controller is evidently reduced as well.
Conclusion
A robust tracking controller based on double closed-loop sliding mode is designed for the sake of addressing the trajectory tracking issue of the UVMS with ocean current disturbances in its joint space. Compared with traditional sliding mode controllers, the integral sliding mode surface enhances the control system’s robustness, and the double-loop controller structure is able to markedly advance its dynamic quality. Significantly, the new switching method also effectively reduces the sliding mode chattering of the UVMS. The asymptotic convergency of its tracking error in joint space proves to be true by Lyapunov direct method. In addition, the proposed method does not require online identification of uncertainties of UVMS, reduces the complexity of the algorithm, and is easier to implement on the UVMS embedded platform. The results of simulation experiments manifest that the tracking controller of the UVMS works well with stability and robustness.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was financially supported by the National Natural Science Foundation of Heilongjiang Province of China (grant no. E2017024).