
Abstract
In this article, the trajectory tracking control is developed by implementing a non-singular terminal sliding mode control for the redundantly actuated parallel mechanism system. The proposed control scheme could guarantee that the tracking errors converge to zero asymptotically. The problem of singularity with regard to conventional terminal sliding mode control scheme can be eliminated with the presented novel non-singular terminal sliding mode surface as well. The corresponding stability of the proposed control scheme has also been proved theoretically in terms of Lyapunov method. In addition, simulations and experiments are conducted for trajectory tracking to validate the effectiveness of the proposed scheme. The illustrative results demonstrate that the proposed scheme is available to solve the uncertainties and external disturbances with self-tuning in real time. Furthermore, the prominent characteristics of the presented control scheme are quick convergence, high accuracy, and high robustness, which can achieve excellent tracking performance as compared with computed torque control scheme and conventional sliding mode control scheme.
Keywords
Introduction
Parallel mechanisms have some inherent advantages such as high stiffness, high precision, high load-carrying capacity, high force to weight ratio, and fast response speed over alternative serial robots. 1,2 However, the small workspace and abundant singular configurations within the workspace limit their wide applications. 3 Redundantly actuated parallel mechanisms not only inherit those aforementioned advantages but also can improve the kinematics and dynamics performance, especially eliminate the kinematic singularity. 4 –6 Since parallel mechanism is essentially a complex closed-loop structure and multi-body nonlinear system, it results in dynamics time-varying and coupling characteristics. Some motion trajectories have been addressed to achieve movement in many applications, for instance, Božek et al. 7 –9 studied the differentiable Jordan curve trajectories for the planar kinematic mechanisms. Lozhkin et al. 10 investigated the motion trajectory of the kinematic mechanisms via parametric equations of a circle and ellipse. Without a doubt that high-precision tracking control of parallel mechanism is extremely necessary and significant for parallel mechanism system control implementation. Ouyang et al. 11 proposed a new model-free proportion differentiation (PD) with sliding mode control (SMC) law for the planar translational robotic systems tracking control. Matveev et al. 12 also proposed a sliding mode navigation control law to deal with the practical border patrolling and obstacle avoidance problems for a unicycle-like robot. With consideration of unknown disturbances and uncertainties (for instance, friction, wear, clearance, noise, etc.) of parallel mechanism system, traditional controllers of parallel mechanisms such as proportion integration differentiation (PID) controller and computed torque controller cannot obtain good tracking accuracy, 13 –16 because the abovementioned controllers are very sensitive to the uncertainties and unknown disturbances.
To achieve high trajectory tracking precision, many literatures on advanced control strategies of parallel mechanisms have been successfully developed in recent years, for example, fuzzy controller, 17 neural network controller, 18 sliding mode controller, 19 adaptive controller, 20 robust controller, 21 as well as the combination of aforementioned controllers. 22 –25 Although great achievements have been obtained by some researchers, the practical applications of the controllers are still not very promising. Therefore, it is highly desirable to have dedicated tracking control scheme which has capability to deal with unknown disturbances. 26 At present, SMC method presents an alternative method for robust tracking control to make the system stabilization in the presence of some disturbances and uncertainties, and it is well-known for the powerful robustness to matched disturbances and uncertainties. 27 Shefaw 28 designed a third-order sliding mode controller for Delta parallel mechanism to achieve a circular trajectory tracking, and the illustrative simulation results indicated that the designed controller is insensitive to parameter variations, external or internal effects and can eliminate the chattering phenomenon. Liu et al. 29 proposed a fuzzy SMC of multi-degrees of freedom parallel mechanism in rehabilitation environment, and the performance enhancement and chattering elimination can be achieved by a fuzzy logic system utilized as the additional compensator. Piltan et al. 30 designed an acceptable estimate sliding mode fuzzy controller and applied it to a robot manipulator for reducing uncertainty and unknown nonlinearity. Ai et al. 31 proposed an adaptive backstepping SMC method for a two-degree-of-freedom parallel compliant rehabilitation mechanism, and the external disturbances can be estimated by an observer and accommodated online. SMC has revived much attention in the last few decades as a useful and powerful, robust control method in overcoming uncertainties, bounded external disturbances, and unpredictable parameter variations. Le et al. 32 proposed a chattering-free neuro-sliding mode controller for trajectory control of two-degree-of-freedom parallel manipulator which has a complicated dynamic model, including frictional uncertainties, modeling uncertainties, and external disturbances. In addition, the online weight tuning approaches of neural networks can compensate completely the large nonlinear uncertainties and external disturbances, which is different from the traditional switching function (i.e. sign function and saturation function) resulting in big chattering. 33 This phenomenon is extremely serious in mechanism applications, so Qi et al. 34 presented a hybrid SMC algorithm with combination adaptive and fuzzy supervisory controller to replace switching gain and change the width of the boundary layer to further reduce the chattering. Furthermore, the simulation results also demonstrated that the parallel mechanism can achieve trajectory tracking control with good robustness characteristic with consideration of the uncertainties and disturbances. To further ensure the finite time convergence, a nonlinear sliding mode termed terminal sliding mode control (TSMC) has been proposed in the literature. 35 –37 TSMC not only provides fast convergence within finite time but also acquires high control precision as compared with conventional SMC. However, the existing terminal sliding mode controller implementation methods still have a singularity problem. Numerous corresponding studies have been done to prevent the singularity problem by non-singular terminal sliding mode control (NTSMC). 38 –40
The main contribution of this article is to propose a novel NTSMC scheme for the redundantly actuated parallel mechanism system, with a view of achieving an excellent tracking performance in the presence of uncertainties and external disturbances. With consideration of nonlinear and complexity of the parallel mechanism system, NTSMC, by integrating the camera sensor technology, is implemented to improve the tracking performance of the parallel mechanism. The lumped uncertainty is compensated by self-tuning robust control term, the stability of the parallel mechanism system has been theoretically proved in terms of the Lyapunov theorem, and the results including simulation and experiment validate the effectiveness of the presented control scheme.
This article is organized as follows. The dynamic modeling of the redundantly actuated parallel mechanism is mainly formulated in the task space. The proposed NTSMC scheme is presented in the “Control design” section. The corresponding simulations and experiments are conducted in the “Simulations and experiments” section so as to evaluate the tracking performance. In the “Discussion” section, some test results are presented to illustrate the performance of the proposed control scheme. Finally, the concluding remarks are addressed in the “Conclusions” section.
Dynamic analysis of parallel mechanism
Architectural description
The architecture of the 2RPU-2SPR redundantly actuated parallel mechanism (R, P, U, and S indicate rotational, prismatic, universal, and spherical kinematic joints, respectively) is shown in Figure 1. 41 It mainly consists of a fixed platform, a moving platform, and four limbs with two of the same identical kinematic configuration. The prismatic joints described by the linear joint variables di connects the fixed platform to the moving platform via a rotational joint followed by a universal joint or a spherical joint followed by a rotational joint. The prismatic joint moves along a linear guide actuated by a servomotor (i.e. DYNAMIXEL MX-12W) via a ball screw mechanism.

Mechanical structure of parallel mechanism.
Dynamic model of parallel mechanism
For modeling purposes, as depicted in Figure 2, we assign a fixed coordinate system B-xyz on the lower platform and a moving coordinate system A-uvw on the upper platform. The variable parameters can be expressed as
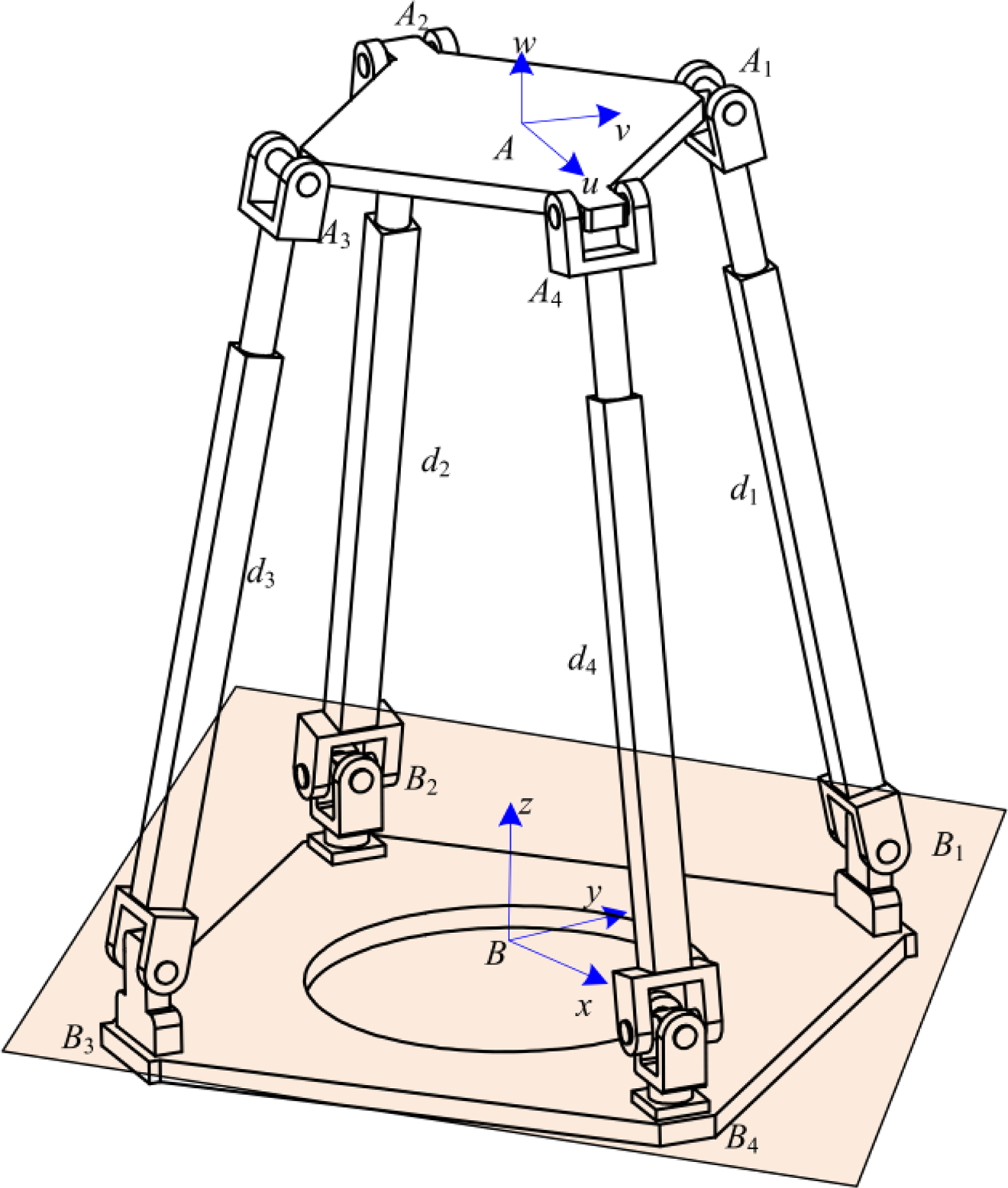
Schematic diagram of parallel mechanism.
The mapping relation between the actuated joint and the task workspace is expressed by the Jacobian matrix

It is noted that above Jacobian matrix

So the relation can be derived as

The derivate of equation (3) versus time is expressed as

where
The dynamic formulation in task space of the 2RPU-2SPR redundantly actuated parallel mechanism has been derived based on our previous work addressed in the reference 42

where
Meanwhile, substituting equations (3) and (4) into equation (5), the dynamic formulation in the joint space can be written as

In which



In general, due to the bounded uncertainties and the external disturbances, such as mass, moment of inertia, and friction, it is very difficult to establish an accurate dynamic model, but if the modeling errors generated by the abovementioned uncertainties are bounded with known functions, then we can utilize modeling errors between the measured value and the real values. Therefore, the dynamic equation (5) can be derived by the estimated values with parameters errors.

where

In which,
Now, by collecting parameter uncertainties into a single term known as lumped uncertainty that caused by the parameters errors and external disturbance, then equation (8) can be written as

In which

Control design
The control purpose is to guarantee the actual trajectory to trace the desired trajectory in the presence of some uncertainties, and it maintains the parallel mechanism system stable. In this article, we proposed a novel NTSMC scheme to improve the tracking performance.
Conventional TSMC
Let us define the tracking error and its derivatives as
where
Based on the previous achievements, 43,44 the nonlinear terminal sliding surface is designed as follows

where

The conventional TSMC law is described by the following equation

where
Once the terminal sliding surface

It can be observed that the above control law (15) can guarantee the sliding mode surface to converge to zero within finite time, that is, to say,
Non-singular terminal sliding mode control
A non-singular terminal sliding surface with respect to the parallel mechanism can be expressed as 45,46

where ω, m, and n are the same with equation (13).
Now, when once parallel mechanism system gets to the terminal sliding surface, then
Meanwhile, the value

Considering the non-singular terminal sliding surface as designed in equation (17), the control law could be chosen as

where h(
To reduce the time when the state reaches the sliding surface and improve the tracking control performance, a self-tuning exponential approaching rate is selected as

where
The approaching rate designed in this article introduced the first-order norm of the errors which can be self-tuning the distance between the actual trajectory and the desired steady trajectory. The first term in equation (20) is the exponential approaching term, if
In addition, to avoid the undesirable oscillations or chattering phenomena, the discontinuous sign function need to be replaced via a continuous approximation saturation function that can be expressed as
where
To validate the stability of the designed control law, the following Lyapunov candidate can be selected as

If and only if
Differentiating

Combining equations (10) and (19) leads to

To further simplify, one can obtain

Substituting equation (25) into equation (23) gives
Case 1

Because k and c are both positive definite matrix, so

Hence

The parallel mechanism system is asymptotically steady, that is,
Case 2

Due to the lumped disturbances are bounded, if k and c values are selected to satisfy the abovementioned inequation, and condition that the absolute of the first term is greater than the second term is satisfied, then
Simulations and experiments
To clarify and confirm the effectiveness of the presented NTSMC for the trajectory tracking performance, the comparative analysis compared with the computed torque control (CTC), 47 and traditional SMC 48 have been implemented on the parallel mechanism system, respectively.
The CTC control algorithm is expressed as follows

The SMC control algorithm is defined as

where
The nominal values of the parallel mechanism system parameters for the simulation and experiment tests are listed in Table 1.
Architectural parameters of the parallel mechanism.
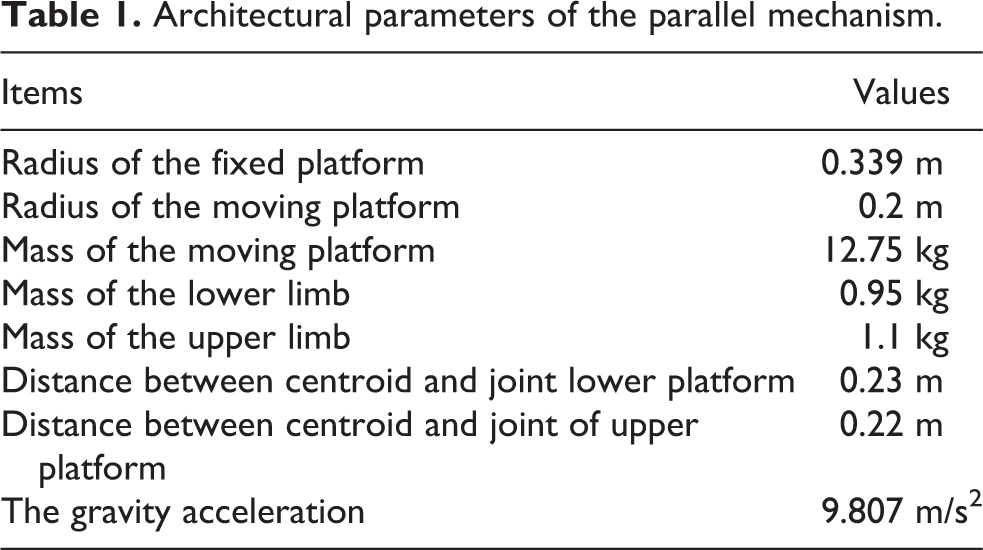
Moreover, the moment of inertia matrix of parallel mechanism including the moving platform, the ith lower limb, and the ith upper limb can be, respectively, measured by the SolidWorks software 2015 as listed follows (unit: kg × m2)

Without loss of generality, the desired trajectory including position and orientations of the moving platform in the task space can be defined as
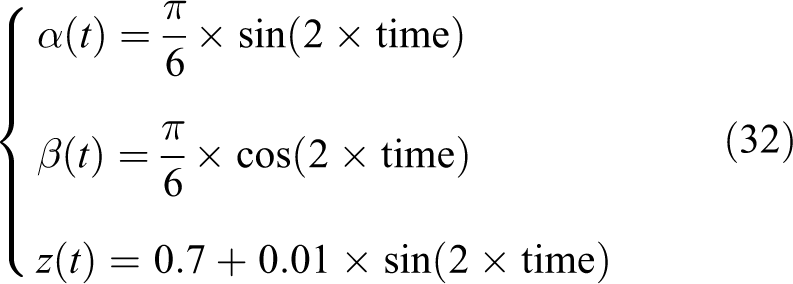
where
In practical implementation, there may be some uncertainties such as noise, clearance, and wear. Herein, we assume that lumped uncertainty obeys Gaussian distribution, that is,

where normrnd random arrays obey normal Gaussian distribution, mu denotes the mean value, sigma denotes the standard deviation value, and mm and nn are the size of return array. Herein, we define mu = 0, sigma = 2, mm = 4, nn = 1.
The controller parameters of the controllers are listed in Table 2.
Control parameter of the three controllers.

NTSMC: non-singular terminal sliding mode control; CTC: computed torque control; SMC: sliding mode control.
The trajectory tracking experimental tests were implemented to verify the effectiveness of the presented NTSMC scheme. The parallel mechanism experimental platform (as depicted in Figure 3) can be employed to validate the trajectory tracking accuracy performance. 49,50

The experimental platform of parallel mechanism.
The experimental platform mainly consists of the parallel mechanism and vision sensor system. The parallel mechanism as shown in Figure 1 can move according to the expected trajectory by changing the torque/force of the four actuated motors. And camera sensor can deal with the image so as to acquire the position and orientation online. The observed position and orientations will be transmitted to the computer for data monitoring and implementing control online. In practical applications, we take more attention to the trajectory accuracy in task space rather than in joint space. Therefore, we can also obtain the translational displace of the actuated joints by detecting the position of the servomotors, then one can obtain the position and orientations by adopting the forward kinematics which is rather complex and possess multi-solution characteristics. Therefore, the version sensor technology utilized in the proposed control scheme demonstrated the simplicity and significant advantages for trajectory tracking control in task space.
Discussion
To validate the effectiveness of the proposed NTSMC control scheme for the execution of prescribed trajectory tracking, the two other controllers, that is, the CTC controller and the SMC controller, have been implemented on the parallel mechanism system simultaneously. As can readily be appreciated in Figure 4, the dotted lines denote the desired trajectory, the solid lines in cyan-blue denote the performance with the CTC controller, the solid lines in pink denote the performance with the SMC control, and solid lines in red denote the performance with the proposed NTSMC control. From Figure 4, we can see that all of three controllers can track the desired trajectory well. When focusing on the initial position, it can be seen that the presented NTSMC control has the fastest convergence rate to the desired trajectory among the three controllers. The detailed position and orientation tracking of the parallel mechanism system are separately illustrated in Figure 5(a) to (c).

Motion trajectory of the parallel mechanism.

Trajectory tracking control performance: (a) z-position, (b) α-orientation, and (c) β-orientation.
Figure 5 illustrates the experimental trajectory tracking results in task space for all the three controllers. In Figure 5(a) and (b), the difference between both the desired trajectory and the actual trajectory is imperceptible for the three controllers. But in Figure 5(c), it is significantly obvious that the proposed NTSMC control demonstrates the superior performance to the CTC controller as well as SMC controller. Furthermore, Figure 5(c) shows that the sliding mode controller regardless of NTSMC or SMC has the inherent robustness nature with consideration of uncertainties and external disturbances.
Simultaneously, the corresponding trajectory tracking errors are depicted in Figure 6. When the control system reaches a steady state, the errors will decrease gradually to zero, although the errors oscillated at the beginning or within some certain time. But finally, the presented controller can maintain the system on the sliding surface all the time.

Trajectory tracking errors: (a) z-position error, (b) α-orientation error, and (c) β-orientation error.
Figure 6 illustrates the amplitude of tracking errors, that is, position errors and orientation errors. From Figure 6, the tracking errors of the three controllers can asymptotically approach to zero or approximately converge to zero at different times, which demonstrates the three controllers are all feasible and able to follow the desired motion trajectory. In a careful view, the difference among the three controllers were pretty obvious in the task space, where the proposed NTSMC controller obtains much smaller errors in comparison with CTC and SMC controllers in Figure 6(b) and (c). Figure 6(b) demonstrates the proposed controller has faster response speed and short response time without a large overshoot, and higher tracking accuracy can be also achieved in Figure 6(b). However, in Figure 6(a), it has a sharp point in z-position direction during the control implementation, and it reaches steady state within a very short time, which is not expected in practical application. Interestingly, in z-position, the proposed controller has the smallest error compared with CTC and SMC controllers when the parallel mechanism system reached the steady state. In a word, the comprehensive comparative results illustrated that the convergence time and the steady state of the tracking errors are superior to CTC and SMC controllers.
For the purpose of quantitative analysis of the trajectory tracking performance, the three error indices including the root mean square error (RMSE), the mean square error (MSE), and the mean absolute error (MAE) are utilized to evaluate the performances of the three controllers. The involved errors are defined as 51
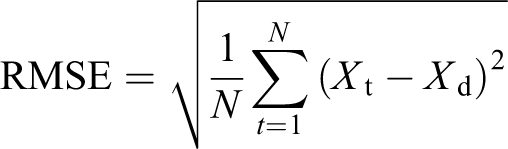

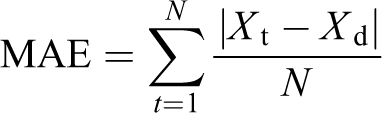
where
Tracking errors comparison of three different controllers.a

NTSMC: non-singular terminal sliding mode control; CTC: computed torque control; SMC: sliding mode control; RMSE: root mean square error; MSE: mean square error; MAE: mean absolute error.
a Sign “E” stands for scientific notation 10.
Simultaneously, the trajectory tracking errors are not only of importance in task space but also important in joint space. Figure 7 shows the experimental tracking results in each prismatic joint for all the three controllers. It is more obvious in Figure 7(b) and (d), the SMC and NTSMC controllers have strong robustness with consideration of uncertainties and disturbances, the two sliding mode controllers show faster convergence rate for tracking the desired values. Note that the presented NTSMC controller obtains much faster transient and higher control accuracy as compared to conventional SMC controller.

The position tracking error of the four prismatic joints: (a) the first limb, (b) the second limb, (c) the third limb, and (d) the fourth limb.
The inputs of NTSMC controller are individually depicted in Figure 8. The chattering phenomenon exists in control inputs, we can see in Figure 8(b) and (d), this is because the proposed controller contains the discontinuous function to decrease or eliminate the influence resulting from uncertainties and disturbances. Because of external random disturbances, the control inputs fluctuate frequently within a small range in Figure 8(a) and (c), which is a natural phenomenon in SMC. However, for the desired trajectory and disturbances, the presented NTSMC controller can still obtain a favorable result even if there are some uncertainties.
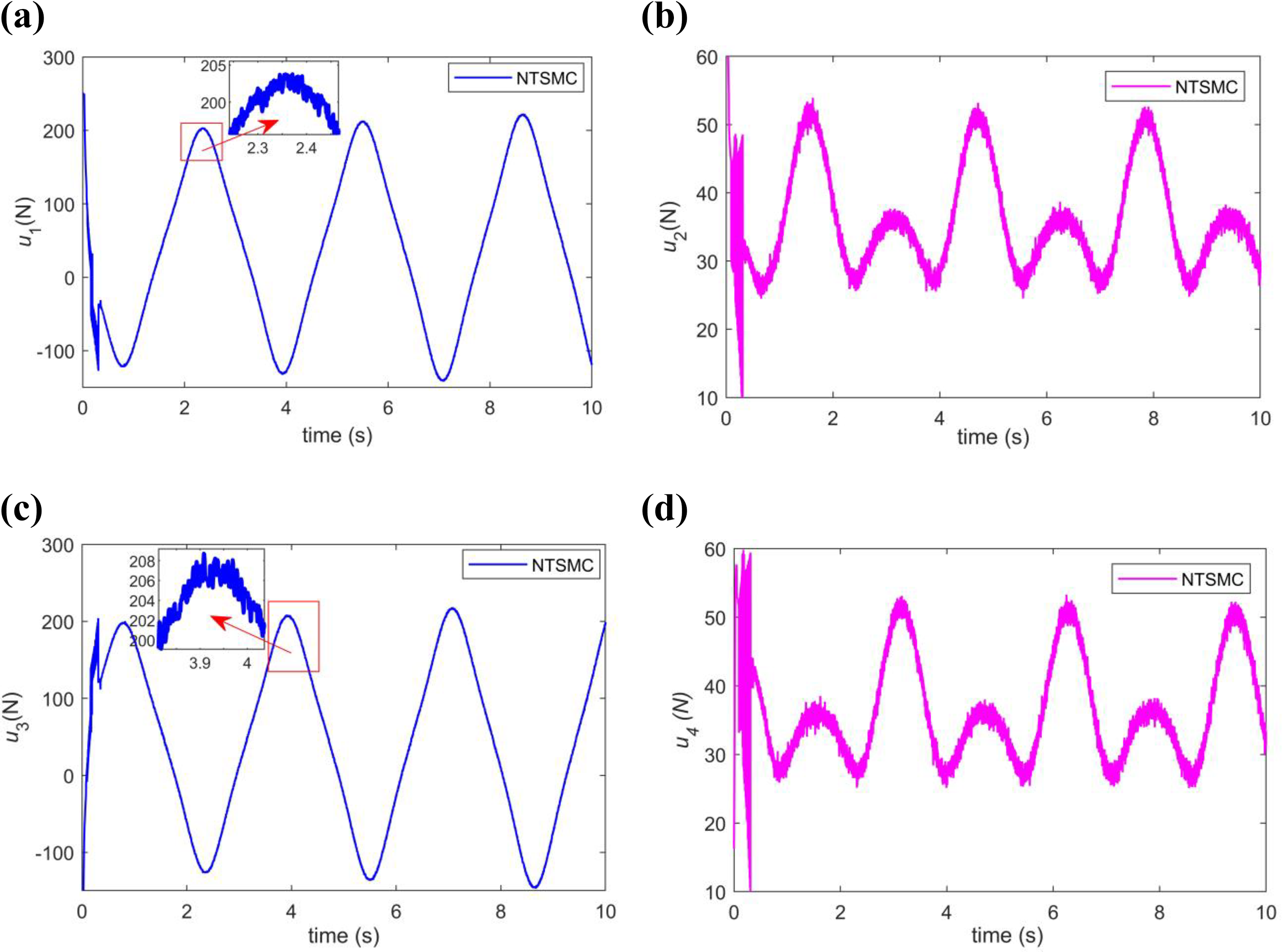
The control inputs of the four actuated joints: (a) the first limb, (b) the second limb, (c) the third limb, and (d) the fourth limb.
Similarly, one can compare the errors with bar chart which can represent the average error amplitude. Figure 9 illustrates the distribution of error amplitude, three vital trajectory parameters are shown in Figure 9(a), and it is obvious that the proposed NTSMC has minimum tracking error compared with CTC controller as well as SMC controller. Since the units of the abovementioned are different, to put the three parameters into one picture, we expanded the z value by 10 times. In addition, the error amplitude of α implemented by SMC is a little larger than CTC scheme due to some uncertainties, which is consistent with the comparative result presented in Table 3. Figure 9(b) and (c) shows the positions and driving forces results of the prismatic joints, respectively. In Figure 9(b), the horizontal axis denotes the positions description of four actuated joints and the vertical axis represents the value of position errors. And in Figure 9(c), the horizontal axis denotes the driving forces description of four actuated joints and the vertical axis represents the value of driving force errors. The positive or negative denotes the direction of driving forces, and one pay attention to the magnitude of absolute values in general. From these comparisons, we can see that the tracking performance of the presented NTSMC scheme is much better than CTC scheme and SMC scheme. The proposed control scheme is implemented without any prior knowledge of the parallel mechanism system but the conventional SMC is model based. The design method is basically consistent, so the proposed NTSMC scheme is more applicable than the involved CTC scheme as well as SMC scheme.

Error comparisons of critical parameters with bar chart: (a)
Conclusions
In this article, an NTSMC scheme is implemented on the redundantly actuated parallel mechanism system for trajectory tracking control with due consideration of the model uncertainties and disturbances. The presented controller can guarantee the tracking errors converge to zero asymptotically within finite time in accordance with Lyapunov method. The obvious advantages of the presented controller are that it is comparatively simple to achieve and can make certain high tracking performance with much more faster convergence, much more higher accuracy, and much more stronger robustness. The simulations and experiments are conducted by incorporating camera sensor technology, and the obtained test results illustrated the proposed control possess superior performance to CTC scheme and conventional SMC scheme, which demonstrated the effectiveness of the proposed control scheme. The control scheme offers an alternative method for the transient performance improvement, which can guarantee the performance of the control scheme for practical applications in position and orientation trajectory tracking problem. In the future work, a real-time unknown parameters calibration implementation will be developed in the experiments.
Footnotes
Acknowledgements
The author HZ is grateful to advanced robotics and mechatronics laboratory in York University.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Fundamental Research Funds for the Central Universities under grant nos. 2018JBZ007, 2018YJS136, and 2017YJS158, and China Scholarship Council (CSC) under grant no. 201807090079.