
Abstract
On the basis of the classical computed torque control method, a new composite nonlinear feedback design method for robot manipulators with uncertainty is presented. The resulting controller consists of the composite nonlinear feedback control and robust control. The core is to use the robust control for online approximation of the system’s uncertainty as a compensation term for the composite nonlinear feedback controller. The design method of the new controller is given, and the convergence of the closed-loop system is proved. The simulation results show that the proposed scheme can make the uncertain robot system have strong robustness and anti-interference ability.
Introduction
Robots have various control methods in the literature. 1 –6 There are two main control purposes. One is how to realize the stability of the closed-loop system, so that the trajectory tracking error tends to zero as fast as possible. The other is how to suppress the interference of the uncertainty factor to the system and minimize the influence of the interference signal on the tracking accuracy.
Composite nonlinear feedback (CNF) theory 7 is an effective method for solving fixed-point tracking tasks in saturated systems. Eren et al. 8 verify that the CNF control has better control performance than the time optimal control in fixed-point tracking tasks. However, when there is disturbance in the system or the system model is not accurate (hereinafter referred to as “uncertainty”), the system under the control of CNF would no longer be able to match the reference input accurately. Recently, some progresses are reported on the application of CNF theory. Saleh and Fairouz 9 proposed a CNF technique for robust tracking control of switched systems with unmatched uncertainties and input saturation. This scheme guarantees robustness against uncertainties, removes reaching phase, and avoids chattering problem. Saleh and Ma 10 proposed a combination of finite-time robust-tracking theory and CNF approach for the finite-time and high-performance synchronization of the chaotic systems in the presence of the external disturbances, parametric uncertainties, Lipschitz nonlinearities, and time delays. In this work, a new finite time robust tracking model following control approach is developed based on the CNF scheme. Saleh 11 proposed a combination of CNF and integral sliding mode techniques for fast and accurate chaos synchronization of uncertain chaotic systems with Lipschitz nonlinear functions, time-varying delays, and disturbances. Jafari and Binazadeh 12 proposed an observer-based improved CNF controller for output tracking of general time-varying reference signals in descriptor systems subject to actuator saturation. Jafari and Binazadeh 13 studied the robust output regulation in discrete-time singular systems with actuator saturation and matched uncertainties. The main contribution of this communication lies in designing the CNF control law for uncertain discrete-time singular systems with actuator saturation which guarantees the output regulation against system uncertainties and/or external disturbances.
There are two basic control strategies for uncertain robots: adaptive control 14 and robust control. 15 Although Erhart and Hirche 16 use the adaptive control to obtain better suppression of the uncertainty factor, it only targets the external disturbance factor. If other uncertain factors are considered, the structure of the controller will inevitably change. Wang 17 proposes that when the control system parameters change, adaptive control can achieve certain performance indicators through timely identification, learning, and adjustment control law, but, when there is non-parametric uncertainty, adaptive control is difficult to guarantee the stability of the system. Although the method by Shaker 18 has improved the method of Wang, 17 the real-time requirements are more stringent and the implementation process is more complicated. The robust control can ensure the stability of the system and maintain certain performance indicators within a certain range of uncertainty factors; it is a kind of fixed control and easy to implement. A robust control method can be employed when the adaptive controller does not have the ability to identify changes in the system uncertainty to correct the control law.
As an essential subject of robots, the trajectory tracking control has attracted considerable attention over the last few years. In the study of Elmali and Olgac, 19 a new methodology of sliding mode control with perturbation estimation offers a robust feedback control with much lower gains than its conventional counterparts against slowly varying perturbations. Zeinali and Notash 20 presented a new approach for tracking control of robot manipulators. Yin and Pan 21 proposed a robust adaptive control method to significantly reduce the relatively tracking errors of six-degree-of-freedom (DOF) industrial robots under both external disturbances and parametric uncertainties. Chen et al. 22 proposed a new scheme that combines a computed torque control and a novel model-assisted extended state observer. In the simulation, a two-DOF manipulator is performed to verify the effectiveness and superiority of the proposed controller. Xia et al. 23 proposed a control strategy that combines the double power reaching law with the modified terminal sliding mode for tracking the tasks of rigid robotic manipulators quickly and accurately. Chen et al. 24 consider finite-time trajectory tracking control problem for robotic manipulators with parameter uncertainties and external disturbances. A finite-time controller that achieves high precision and strong robustness is proposed without the requirement of the exact dynamic model. The validity of the control scheme is demonstrated by experiments. In the study of Bezak et al., 25 an intelligent hand–object contact model is developed for a coupled system assuming that the object properties are known. The control is simulated in the MATLAB Simulink, Neural Network Toolbox, and Computer Vision System Toolbox. Based on the intrinsic properties of the plane, Bozek et al. 26 proposed a new method of calculation of Jordan curves trajectory of the robot movement.
In this short communication, the robust CNF is proposed to the design of a controller for robot manipulators. It is combined with the traditional computed torque design method to improve tracking performance and to enable systematic stability analysis in the presence of the uncertainties. To effectively suppress the adverse effects of uncertain factors on the robot system, realize the stability of the uncertain robot system, and accurately track the reference input, a combined control strategy of CNF control and robust control is proposed. The core is to use the robust control for online approximation of the system’s uncertainty as a compensation term for the CNF controller. Then the design method of the new controller is given, and the convergence of the closed-loop system is proved. The simulation results show that the proposed scheme can make the uncertain robot system have strong robustness and anti-interference ability.
The main contribution of this article lies in robustifying the CNF control law for the uncertain robot manipulators which improves the tracking performance and guarantees the systematic stability against system uncertainties and/or external disturbances. In this regard, the robust CNF is designed by adding the robust control for online approximation of the system’s uncertainty as a compensation term to the nominal CNF control law. For this purpose, a theorem is given to prove that the proposed control law can drive the output of the uncertain robot manipulators to track a reference input with an ultimately bounded tracking error. Compared with the original CNF controller and robust controller, the new controller has better control performance, which not only fully retains the fast response and overshoot of the CNF control method but also retains the advantage of robust control for effective suppression of uncertainties. Furthermore, computer simulations are done for a practical example to verify the theoretical results.
The article is organized as follows. The second section formulates the problems and includes some preliminaries. The third and fourth sections present combined robust control and CNF control design method and carry out the stability analysis of the closed-loop system, in the presence of uncertainties, respectively. Simulation results, in comparison with the original CNF control and the robust control method, are given in the fifth section. The last section concludes the article.
Problem formulation
The equations of motion of an n-link rigid robot can be expressed in the form of

where
Motion tracking of robot manipulators in joint space can be described as follows. For a given reference input

and in the presence of the uncertainty,
CNF7,8 has been developed for the tracking control of linear systems under actuator saturation. It consists of linear and nonlinear feedback controls and is a nonlinear design method. The linear feedback control has a small damping ratio, which ensures a fast response without saturation occurrence. While the nonlinear feedback control increases the damping ratio, the response approaches the reference input and thus helps to avoid overshoot.
In practical engineering, the precise model of the robot object is difficult to obtain, and the controller based on the calculated torque can only be designed according to the ideal nominal model, which can be expressed as
where

are the

We use

where
New controller design
The new control law can be designed as follows

Substituting equation (5) into equation (1), we can obtain

Because

Then, we have

Then after some algebraic manipulations, we have

So

where
The robot dynamics equation has the following properties 16 :
The inertia matrix

There is a known function

For any vector

that is, the matrix value function
When the above properties are satisfied, the following lemma can be proved.
Lemma 1
If the robot system satisfies equation (11), there exists an estimated value

If the robot system satisfies equation (12), there exists an estimated value

Proof
If the inertia matrix

We choose an estimate value

Through simple calculations, we can find such an α such that

So if the robot satisfies equation (11), there exists the estimated value
If the robot satisfies equation (12), under the condition of equation (15), then the following can be obtained

where
Because

Therefore, we can obtain

Let

where
System stability analysis
Theorem 1
Given the robot system (1) and the new control law (5), if the robot closed-loop systems satisfy the following conditions
There exists

If the initial condition
Then the trajectories of the closed-loop system starting from
Proof
Combining equations (1), (5), and (10), after cancellation of nonlinear functions

Then, define position error e and speed error

Let

The time derivative of the Lyapunov function V along the trajectories of the closed-loop system shows that

where vi
is the ith element of
Considering the item
Therefore, we have

It makes vi
and

We always have

It means

According to equation (19), when

When

According to Huo, 27 we can prove

Substituting equation (23) into equation (21), we can obtain

where

From equations (22) and (24), we deduce that the condition for system convergence is
That is, for any reference input qd
and initial state,
From equation (20), using the method of Lagrange multiplier, the convergence radius c satisfying the stability requirement

This completes the proof.
In summary, the new control scheme can ensure that the solution of the closed-loop system is ultimately uniformly bounded, and when the control algorithm allows the selected
Simulation results and analysis
For the PUMA560 robot, the dynamic equation is in the form of equation (1), which is expressed as follows
The error disturbance is selected as

The desired trajectory is

Let

To design kp
and kv
, letting
To guarantee the output of the controller operating in the linear range of actuators at the start, we choose
In the simulation, we choose
Some simulation results of the closed-loop system under feedback laws are shown in Figures 1 to 8.

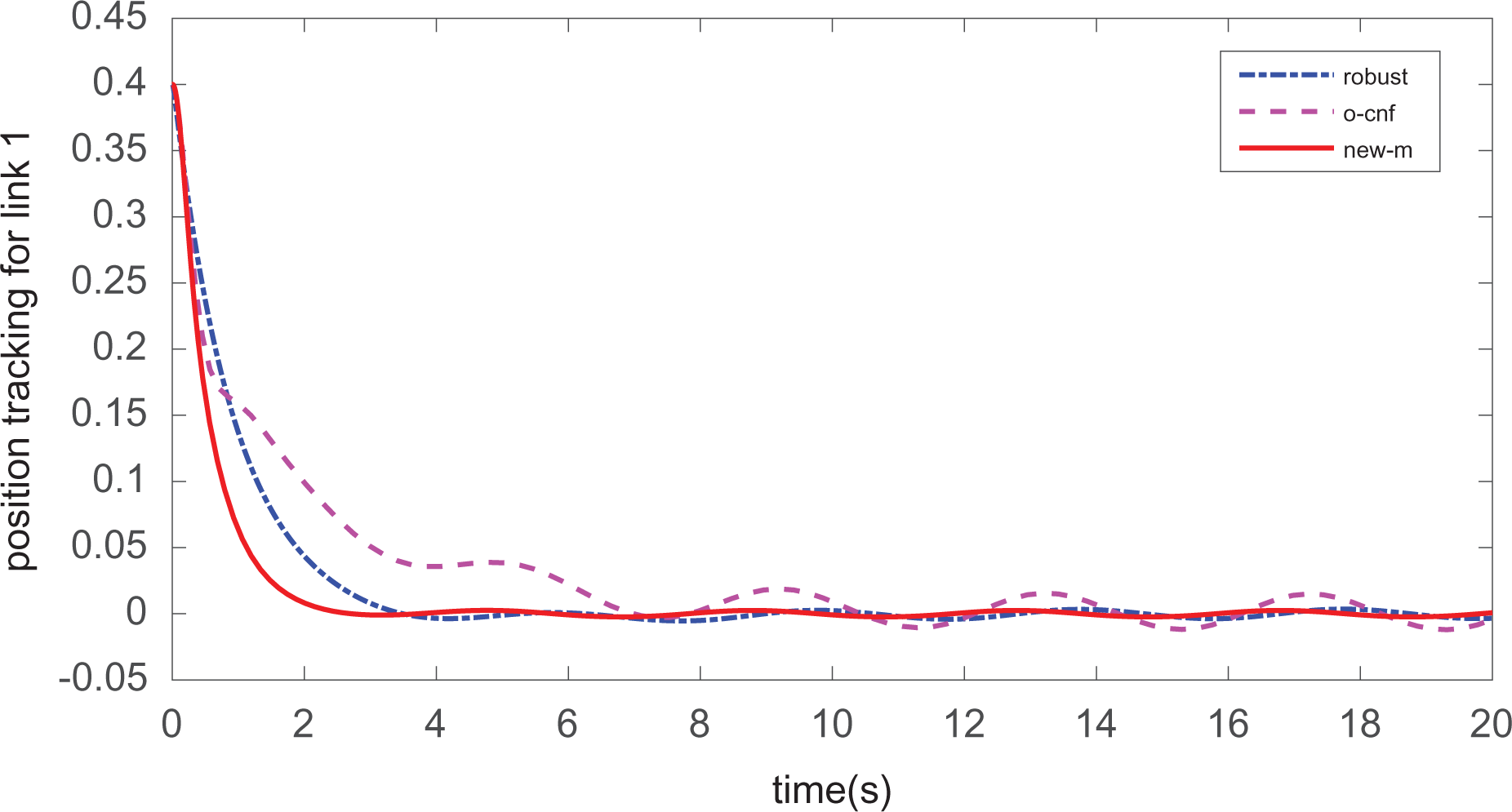
Position tracking for link 1 under different controllers.

Position tracking for link 2 under different controllers.
Trajectory tracking error of joint 1 under different controllers.

Trajectory tracking error of joint 2 under different controllers.

Estimation and compensation of uncertainties under the robust controller.

Estimation and compensation of uncertainties under the new controller.

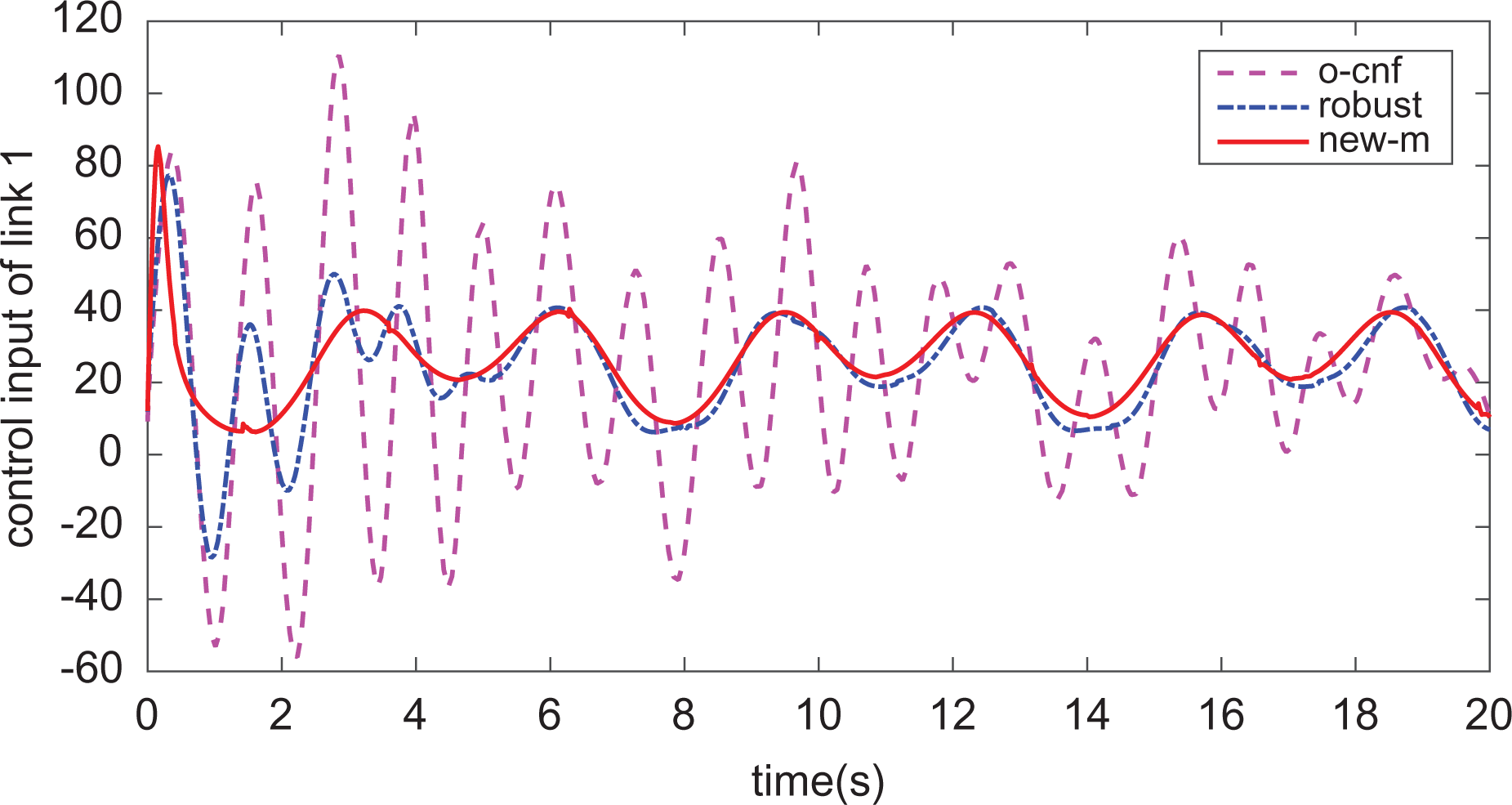
Total control input for joint 1 by different controllers.
Total control input for joint 2 by different controllers.
Figures 1 to 4 are the simulation results of the closed-loop system under the original CNF controller, the robust controller, and the new controller. From Figures 1 to 4, it can be seen that the proposed controller has the fast response, almost no overshoot and the fastest settling time. From the three indices, the proposed new CNF controller has the best transient performance.
Figures 5 and 6 show the estimation and compensation results of the torque generated by the uncertainties of the system under the robust controller and the proposed new controller. Taking joint one as an example, it can be seen from the compensation curve that the proposed new controller is more accurate in estimating and compensating for uncertainty when
Figures 7 and 8 show the control inputs for the system under different controllers.
Conclusion
The new controller proposed in this communication not only enables the robot system to obtain good trajectory tracking ability but also makes the system have good stability and robustness. Compared with the original CNF controller and robust controller, the new controller has better control performance, which not only fully retains the fast response and overshoot of the CNF control method but also the advantage of robust control for effective suppression of uncertainties. Therefore, the scheme can be extended to the space trajectory tracking task of the robot manipulators. The controller proposed in this communication has a good control effect through computer simulation. But for the specific robot, the control effect of the proposed algorithm needs to be further verified by specific experiments. In the next step, we will verify whether the algorithm in this communication is effective for the actual robot.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China [nos 61663030 and 61663032], the Natural Science Foundation of Jiangxi Province [no. 20142BAB207021], the Foundation of Jiangxi Educational Committee [no. GJJ150753], the Open Fund of Key Laboratory of Image Processing and Pattern Recognition of Jiangxi Province (Nanchang Hangkong University; no. TX201404003), the Key Laboratory of Nondestructive Testing (Nanchang Hangkong University), the Ministry of Education [no. ZD29529005], and the reform project of degree and postgraduate education in Jiangxi [no. JXYJG-2017-131).