
Abstract
It is difficult to obtain a precise mathematical model of free-floating space robot for the uncertain factors, such as current measurement technology and external disturbance. Hence, a suitable solution would be an adaptive robust control method based on neural network is proposed for free-floating space robot. The dynamic model of free-floating space robot is established; a computed torque controller based on exact model is designed, and the controller can guarantee the stability of the system. However, in practice, the mathematical model of the system cannot be accurately obtained. Therefore, a neural network controller is proposed to approximate the unknown model in the system, so that the controller avoids dependence on mathematical models. The adaptive learning laws of weights are designed to realize online real-time adjustment. The adaptive robust controller is designed to suppress the external disturbance and compensate the approximation error and improve the robustness and control precision of the system. The stability of closed-loop system is proved based on Lyapunov theory. Simulations tests verify the effectiveness of the proposed control method and are of great significance to free-floating space robot.
Introduction
With the development of space technology, space robots are playing an increasingly important role. Unlike the robot with fixed base on the ground, the space robot base is floating freely and belongs to a rootless multi-body system. It has dynamic coupling between the floating base and each member of the manipulator, and its space liquid fuel consumption also causes some disturbance to the system, therefore, it has stronger coupling and nonlinearity than ground robot. Many control methods applied to ground robot are difficult to achieve satisfactory control results in space robot.
Space fuel directly determines the operating life of space robots, so it is very precious. If the position and attitude of the base are not controlled, it can save fuel and prolong the service life of the spacecraft. Therefore, it is of great significance to study free-floating space robot (FFSR). 1 –3
The FFSR arm movement must cause the coupling motion of the base, and the system is more nonlinear. 4 –6 In particular, if the influences of uncertainty factors are considered, such as measurement errors, machining accuracy, external interferences, and gear clearances, the precise mathematical model is difficult to get. These problems increase the difficulty of high precision control. 7,8
Pan and Yu 9 provided the first result of parameter convergence without the PE condition for adaptive control of a general class of robotic systems. Yu and Chen 10 proposed a terminal sliding mode control scheme for FFSR system, which is not controlled by the position and attitude of the base. According to the problem of stability control of space robot in task space, Sun et al. 11 proposed an adaptive tracking controller using neuro-fuzzy dynamic inversion for a robotic manipulator, with its dynamics approximated by a dynamic Takagi–Sugeno fuzzy model. Chen 12 proposes a novel dynamic structure neural-fuzzy network (DSNFN) via a robust adaptive sliding-mode approach to address trajectory tracking control of an n-link robot manipulator. Wai 13 proposed a neural network control method based on inversion. Wu and Wang 14 propose an adaptive neural network stability control method for robot system in task space. For the nonlinear space robot with friction dead zone, a compensation control strategy based on neural network is proposed by He et al., 15 and neural network controller is used to identify nonlinear models.
For the unknown uncertainty of the space manipulator model, Xie et al. 16 proposed an adaptive control method based on neural network, the method used the neural network to approach the uncertain part, and the approximation error is eliminated by variable structure controller. To solve the trajectory tracking control problem of the robot in joint space, Yang 17 proposed the model control strategy based on the determination of learning theory. Zhang et al. 18 studied the redundant control method of neural variable structure under the condition of terminal mass mutation. In Cheng and Chen’s study, 19 the system stability problem of the space dual-arm robot after capturing the spacecraft is presented, and they propose an adaptive neural network control strategy.
In the above literature, the neural network adaptive controller is used for the overall approximation of the unknown nonlinear model, the approximation errors or disturbances are usually eliminated by robust controller or variable structure controller, and the lack of adaptive characteristics will lead to chattering. In this article, a neural network control method for different nonlinear parts is proposed. At the same time, the approximation error and disturbance are suppressed by the adaptive robust control method, which avoids the chattering.
For these reasons, an adaptive robust control method based on neural networks is proposed. The dynamics model of floating base space robot is established, a computed-torque controller based on precise model is designed. For the unknown nonlinear part in the model, neural network controller is designed to approximate the unknown models, adaptive learning laws of network weights are designed to realize online real-time adjustment. An adaptive robust controller is designed to suppress external disturbance and compensate approximation errors and improve the robustness and control precision of the system. Then, the stability of the closed-loop system can be proven by Lyapunov’s method for stability. The simulation test verifies the effectiveness of the proposed control method.
Dynamics equation of FFSR
The dynamic parameters of space robot are defined as shown in figure 1. 16 –18

Parameters of space robot.
The base of the FFSR is not fixed, thus the system added six degrees of freedom, and then n joints of space manipulators have n + 6 degrees of freedom. Because of the space microgravity, the weak gravity gradient is ignored. Therefore, the Lagragian function can be reduced to sole a kinetic component. The dynamical equation of n joint space robot based on the second Lagrange equation can be deduced, the dynamic equation has been widely used in space robot research. 18 –21

where
When position and posture of the base are not controlled, that is

where
The dynamics equation (2) of FFSR has the following properties 19 –22 :
Design of computed-torque controller for precise model
From property (positive definite), the dynamics can be written as


where
Then, the kinetic equation can be transformed into

The desired trajectory is defined as

The trajectory tracking errors are defined as

The filter tracking error function is defined as

From equation (7), it can be seen that if
According to Newton binomial theorem:

where
From equation (8), it follows that equation (7) can be written as

Then
namely

where


Define

Then, equation (10) can be written as

For equation (2), if M, C, and d can be precisely obtained, namely, the nonlinear function
The computed torque control law is designed as follows

where,
Theorem 1
For the space robot system (5), the control law (14) is adopted. Then, the trajectory tracking error and its derivatives are bound to converge to zero.
Proof
Substituting equation (14) into equation (13)

where
To solve the differential equation

Obviously, when
However, in practice, due to the measurement level limitation and external interference factors, the nonlinear function
Design of adaptive robust controller based on neural network for unknown model
Because RBF neural network (RBFNN) is a local generalization network with fast-learning speed and can avoid local minimum problems.
19
–22
Therefore, this network is used to approach the unknown nonlinear
RBFNN belongs to the three-layer forward network, which is the input layer, the hidden layer and the output layer, as shown in figure 2. The input vector is mapped by the hidden layer basis function, if the base function center and width are determined, the mapping relationship is determined. There is a linear relationship between the hidden layer and the output layer. 23 –26

Radial basis neural network structure.
Define
Namely


Its respective radial basis neural network optimal output is


where x is input of the neural network,
According to the approximation ability of RBFNN, hypothesis 16 –22
In practice, it is difficult to obtain the optimal approximation for neural networks. Therefore,
Namely


For the actual weights
Meanwhile





Then

If

As

where ε0 is any small positive integer, IP is unit matrix.
To eliminate the approximation error of neural network and external interference, improve the control precision. Robust controller is designed as follows


where Ks is a positive, δ is a variable.
An adaptive neural network robust controller is designed as follows

Adaptive control law is designed



where
Theorem 2
If the hypothesis is satisfied, the adopt control law equations (25) to (28) and adaptive law equations (29) to (31), All signals of the system’s closed-loop system can be guaranteed to be bounded. Moreover, the trajectory tracking error and its derivatives converge uniformly to zero.
Proof
Substituting equation (28) into equation (14)

Because

In combination with equations (25) and (33), the following formula can be obtained

Substituting equation (34) into equation (32)

Equation (35), multiply both sides by

The Lyapunov function is defined as follows

Then

Substituting equation (36) into equation (38)

where


Substituting equations (29) and (30) into equation (40)


Then, equation (41) can be written as

Substituting equation (42) into equation (43)

Substituting equation (31) into the above equation:
Then

That is,
Integral the above formula (45)

That is
Control system validation and analysis
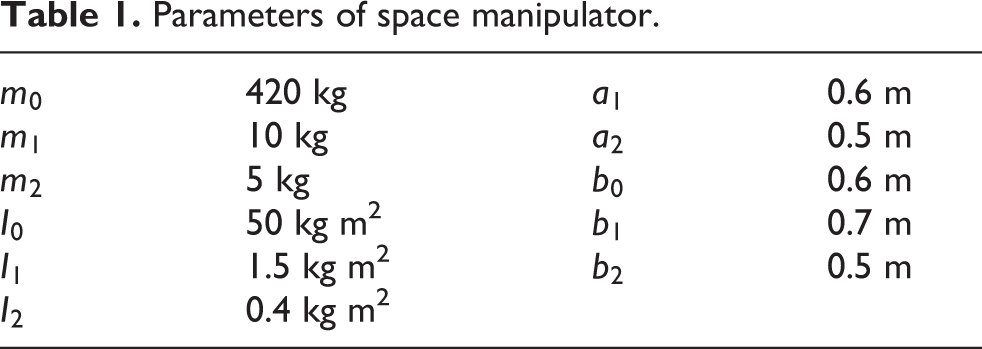
The validity of the control method is validated for double joints free-floating space manipulators, The simulation parameters of space manipulators are shown in Table 1. m0, m1, m2, and I0, I1, I2 are the mass and inertia of the base, rod 1, and rod 2 respectively. b0, b1, b2, respectively, represent the center of mass of the matrix, rod 1 and rod 2 to the distance of the joint, a1 and a2 are joints to each center of mass. The physical meaning of specific parameters is as shown in the Figure 3:
The increased disturbance is mainly used to verify the effectiveness of the controller, the disturbance is supposed:

Desired trajectories:


Controller gain and parameters:

Joint initial values:

Parameters of space manipulator.
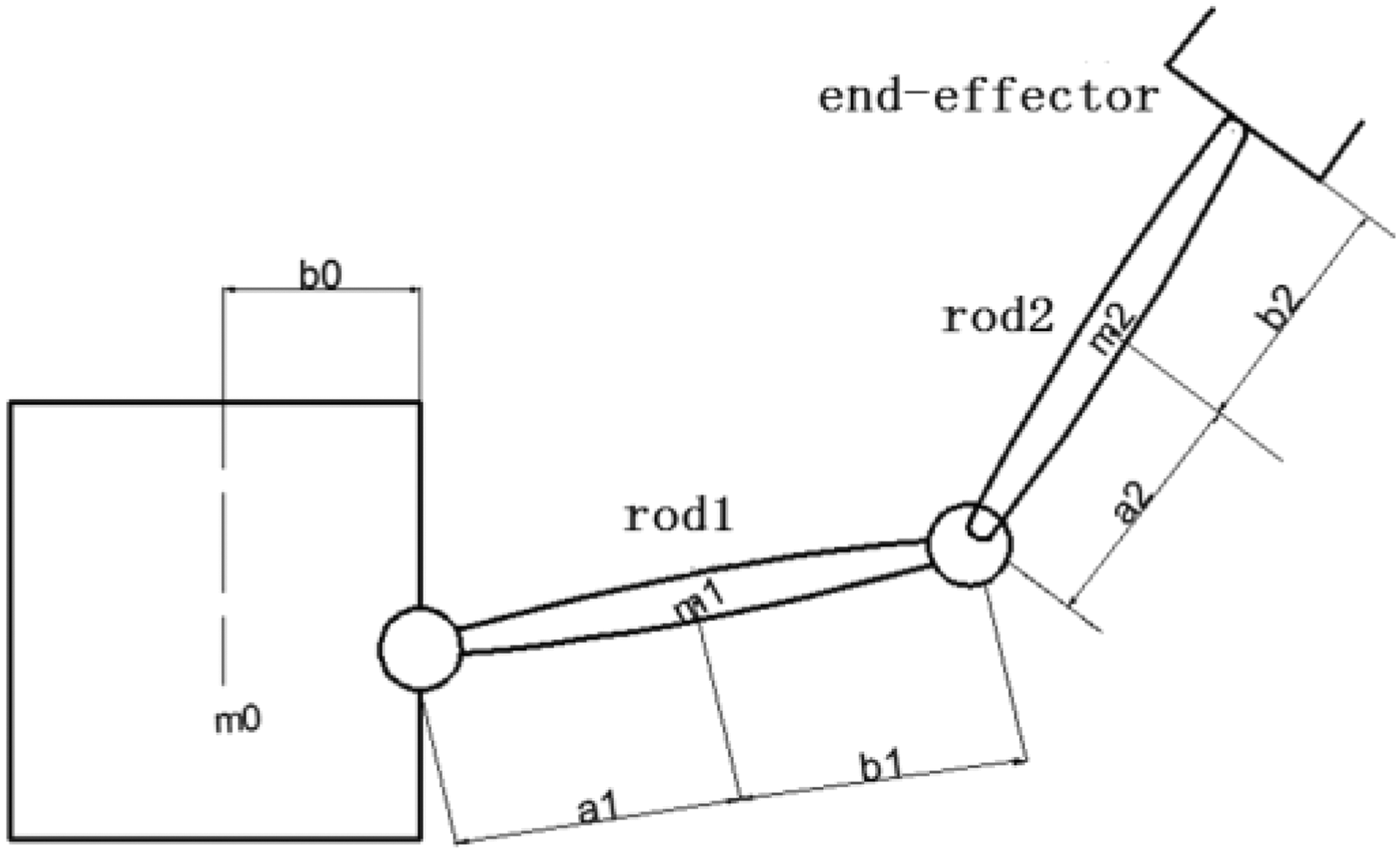
Schematic diagram of two-rod space manipulator parameters.
The initial weights of the neural network are all set to 0, and the width and center of each base function are randomly selected in the input and output domain, and the hidden layer node number is 40.
Three control methods are used to verify the advantages of the proposed control methods. Computed-torque control method is used by method 1; sliding mode variable structure control method is used by method 2; adaptive robust controller base on neural network is used by method 3.
Method 1: Computed-torque control
Method 1 is computed-torque controller (equation (14)). The simulation results are shown in Figures 4 and 5.

Trajectory tracking of method 1 (computed torque controller): (a) trajectory tracking of joint 1 and (b) trajectory tracking of joint 2.
Control torque of method 1 (computed torque controller): (a) control torque diagram of joint 1 and (b) control torque of joint 2.
It can be seen from Figures 4 and 5, method 1 can guarantee the stability of the control system, and the control torque is small, but there is a large steady state error. It is shown that the simple computed-torque controller cannot achieve the control precise for the coupled nonlinear system.
Method 2: Sliding mode variable structure control
Method 2 is Sliding mode variable structure controller. The simulation results are shown in Figures 6 and 7.

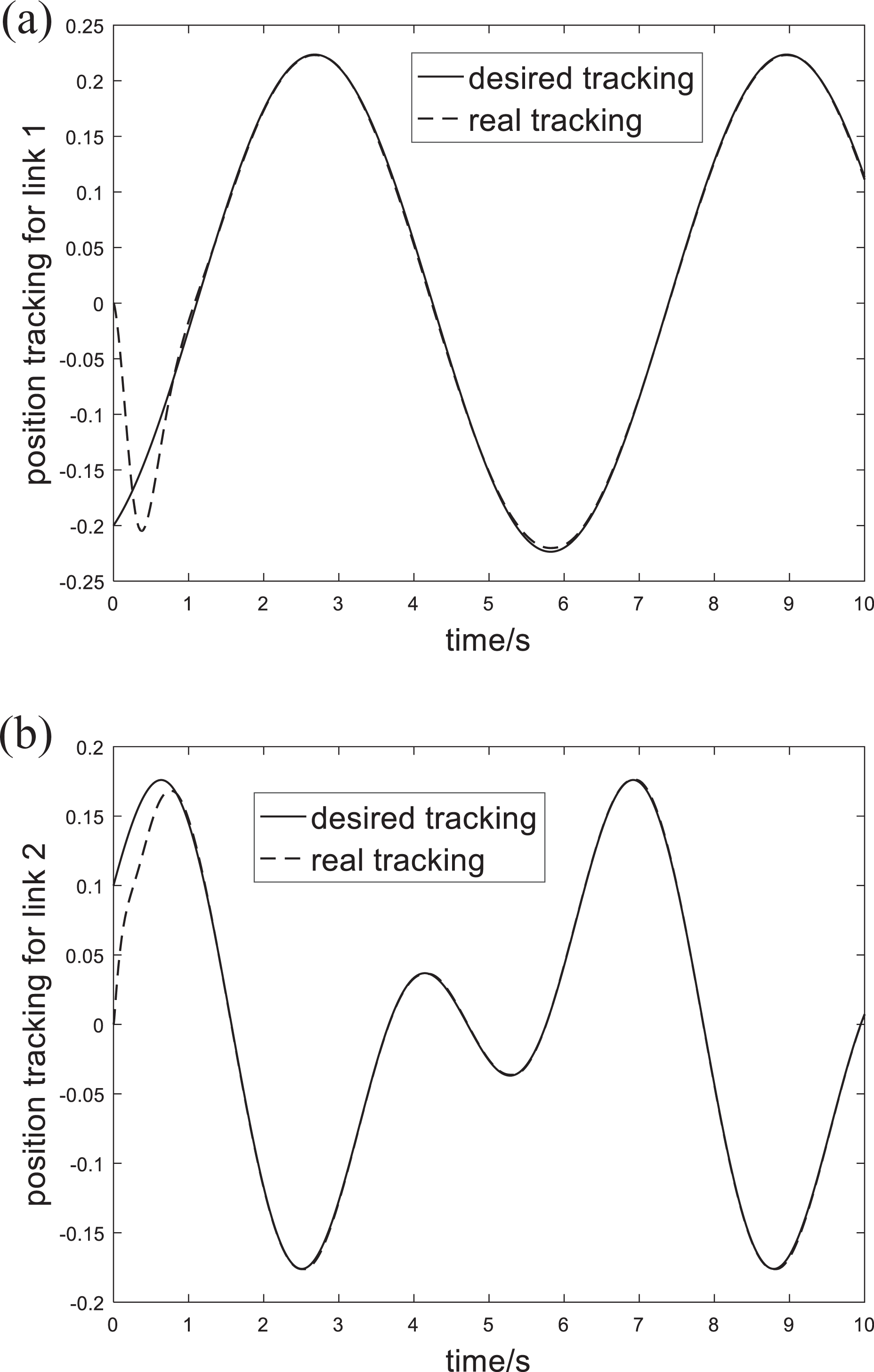
Trajectory tracking of method 2 (sliding mode variable structure controller): (a) trajectory tracking of joint 1 and (b) trajectory tracking of joint 2.
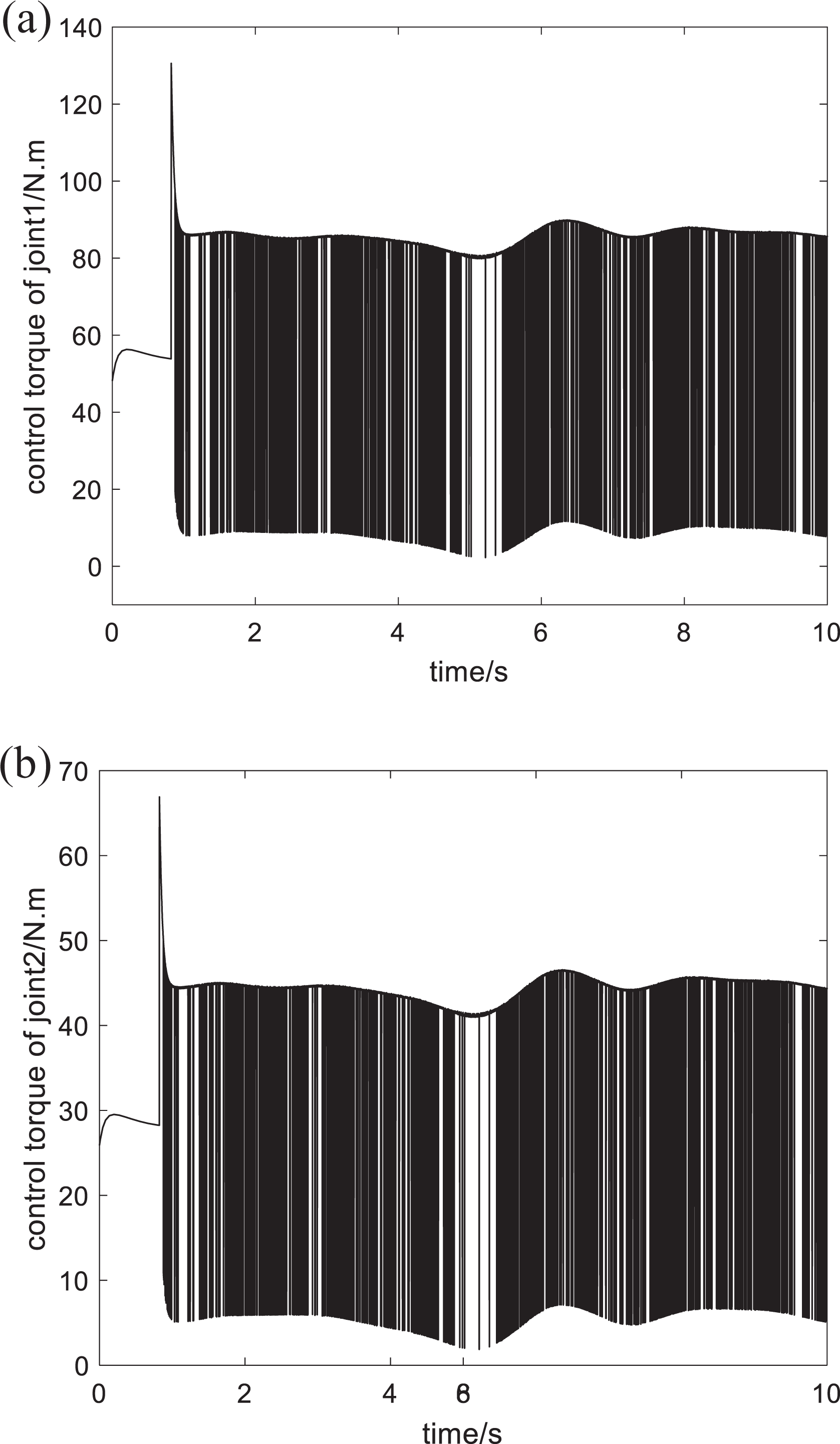
Control torque of method 2 (sliding mode variable structure controller): (a) control torque of joint 1 and (b) control torque of joint 2.
This article further compares with the sliding mode variable structure control to prove the advantages of the control method in this article.
Simulation shows that the sliding mode variable structure control can also achieve better control accuracy from Figures 6 and 7, but its control torque output is large, reaching 80 Nm, which is a waste of precious space energy for space robots. In addition, the torque output is seriously “shaken,” which may cause damage to the equipment in practical engineering, so it is not the best control method.
Method 3: Adaptive robust control base on neural network
Adaptive robust control base on neural network (equations (28) to (31)) is proposed by the article. The simulation results are shown in Figures 8
to 11. Trajectory tracking diagrams are shown in Figure 8;
Trajectory tracking of method 3 (neural network adaptive robust controller): (a) trajectory tracking of joint 1 and (b) trajectory tracking of joint 2.


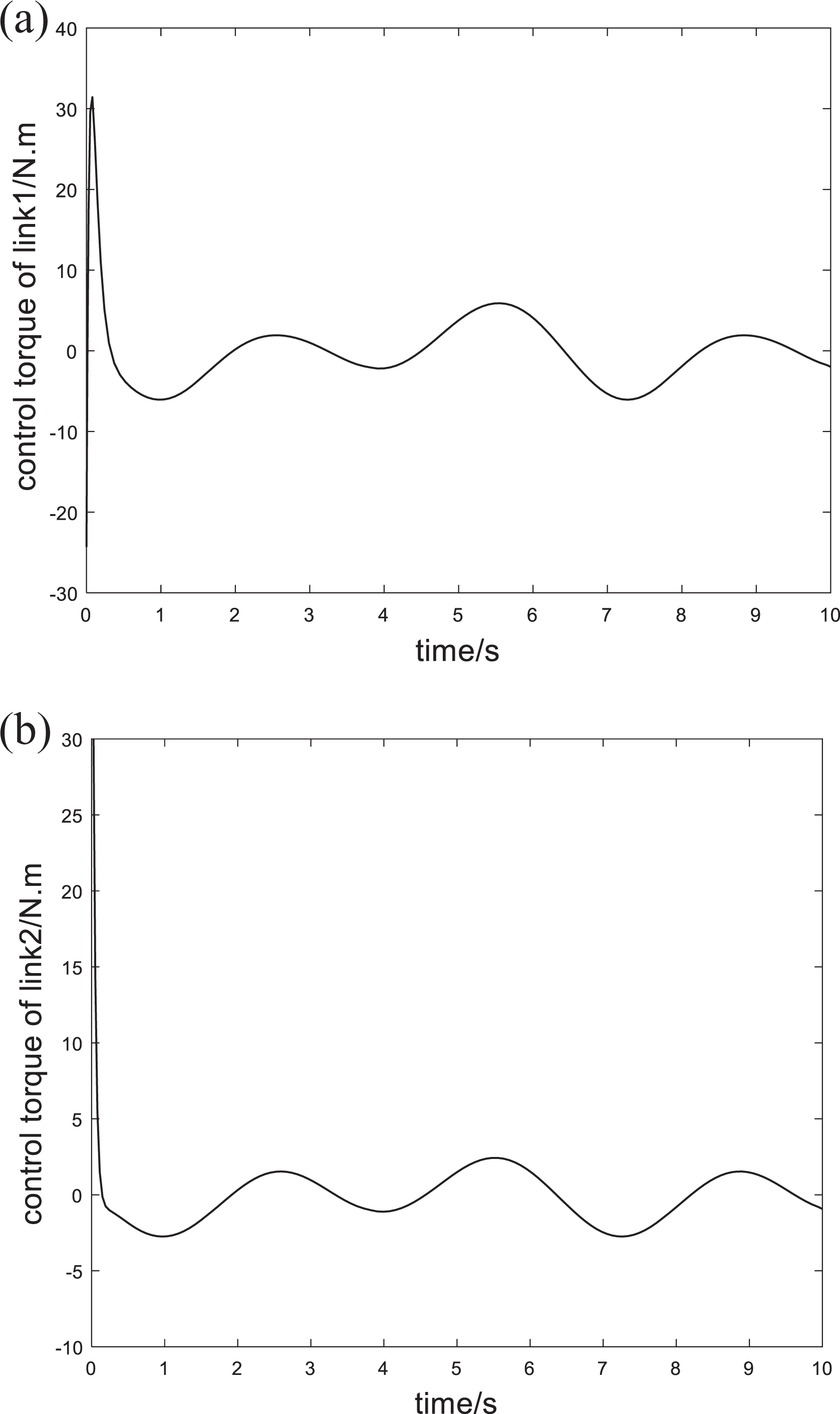
Control torque of method 3 (neural network adaptive robust controller): (a) control torque of joint 1 and (b) control torque of joint 2.

Neural weights evolution curves.
As can be seen from Figure 8 in method 3, the expected trajectory is well tracked in 1.5 s, and the control accuracy is high (Figure 8). As can be seen from Figure 9, the neural network controller is used to approximate
It can be seen that although there is a certain approximation error in Figure 9, the trajectory tracking can still obtain higher control accuracy. It is found that, since the total control law is composed of two parts, namely the neural network controller and the robust controller ur, although the neural network controller has the approximation error, the robust controller can play the role of compensating control, thus eliminating the approximation error and achieving higher control accuracy. This also indicates that the designed robust controller is effective.
It can be seen from Figure 11 that the weight of the neural network starts to evolve from the initial value of 0. Under the action of adaptive regulation, the weight parameters quickly evolved to a more stable range. At the moment, the control precision is satisfied, which indicates that the weight adaptive control law is effective.
The control method proposed in this article has only 5 N·m output torque (Figure 10), which is not only small but also relatively smooth. At the same time, better control accuracy is obtained, so it is a better control method.
Further study, it is also found that the approximation property of neural network is not only related to weight but also related to network parameters. This article adopts the radial basis neural network, and center and width of Gaussian function have great influence on the approximation property. Because this article adopts the form of fixed parameters for both center parameters and width parameters, only weight parameters can be adjusted adaptively, so the approximation accuracy is affected. In the future, to further improve the approximation accuracy, how to design the adaptive regulation law of the center parameter and the width parameter is a subject that needs further research.
Conclusions
An adaptive robust control method base on neural network adaptive robust control is proposed for the unknown FFSR with interferences. Firstly, the dynamic model of FFSR is established. A computed-torque controller based on accurate model is designed and the stability of the system is proved. A neural network controller is designed to approximate the unknown model, the adaptive learning laws are designed to realize the online real-time adjustment of network weights. The designed controller avoids the dependence on the precise mathematical model of the space robot. Adaptive robust controller is designed to eliminate external disturbance and approximation error and improve the robustness of the system.
The stability of closed-loop system is proved based on Lyapunov theory. The simulation test verified the effectiveness of the proposed control method. The proposed control method is of great value for the study of similar nonlinear systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61772247), Lishui Science and Technology Plan Project (2015KCPT03) and (2015RC04).