
Abstract
In this article, two new compliant control architectures are introduced that utilize null space solutions to decouple force and position control. They are capable to interact with uncertain surfaces and environments with varying materials and require fewer parameters to be tuned than the common architectures – hybrid or impedance control. The general concept behind these approaches allows to consider manipulators with six degrees of freedom as redundant by creating a virtual redundancy with a reduced work space. It will be demonstrated that the introduced approaches are superior regarding orthogonal separation of the Cartesian degrees of freedom and avoid inner singularities. To demonstrate their performance, the controllers are tested on a standard industrial robot (Stäubli, RX90B, six degrees of freedom) that actuates two different biomechanically inspired models of the human knee joint.
Keywords
Introduction
Due to the industrial need of robots performing tactile tasks, extensive research has been conducted on robot–object interaction in the past decades. 1 Although the key control strategies were established in the 1980s, the improvement of their accuracy, stability and robustness still challenges the robotic community today. In terms of haptic interactions, this is mainly caused by the task’s complexity itself: A non-linear robot is used to palpate surfaces or uncertain environments and is thereby non-linearly coupled to a partially unknown system.
Two broad categories of compliant or tactile control strategies deal with this task: hybrid position and force control methods. They divide the Cartesian task in force-regulated and position-controlled degrees of freedom (DOFs) 2 and impedance control methods. The latter relate loads and displacements by a diagonal mass matrix combined with a regular damping and a stiffness matrix. 3
The drawback of impedance control methods is that neither position accuracy nor force precision are deterministic and that its stability is limited by the achievable impedances (z-width).
4,5
Furthermore, they require parametrization of the unknown stiffness and damping matrix (
To address these shortcomings, Khatib 8 and Fisher and Mujtaba 9 presented a different approach to dissection: Instead of dividing in Cartesian space and applying the original hybrid method, their method splits position and force-controlled DOFs into task and null space. Several authors following this idea of null space dissection presented various methods for kinematic 10 –14 and dynamic 11,15 –20 control summarized by Dietrich et al. 21 However, while these approaches solve the coupling of the robot tasks, they still rely on the impedance approach with the discussed drawbacks. The framework of Schuetz et al. 22 offers a new perspective as it combines tactile motion control with the decoupling solution of Fisher and Mujtaba. 9 This allows to require few parameters only and to design the dynamics of the system. However, their method is only used to avoid obstacles and is insufficient for persistent contact. The specific usage of designing an explicit force controller based on this architecture has not been regarded yet offers a big potential for control approaches.
The two control methods presented in this article aim to address this gap by reformulating the framework of Schuetz et al. 22 for explicit force control. They consist of a controller for single force or contact control, and one for multiple force control of partially or fully coupled nonlinear systems. As the inherited architecture is based on a null space separation, 22 the control problem can be split according to the task priority. This prioritization increases the performance of the primary task as shown by Sandoval et al. 23 and therefore offers a greater flexibility.
The article is organized as follows. The fundamental framework is explained in the second section. The two new control methods are derived in the third section followed by a stability analysis and a proof, that the provided separation achieves complete decoupling in Cartesian and joint space. Further the prioritization technique is presented. A detailed presentation of our quantitative experiments is presented in the fourth section followed by the conclusion in the fifth section.
Related work
Within this section several related approaches to decoupled position and force control are presented and put in the context of our contribution.
Hybrid position/force control
One of the first compliant control architectures was the hybrid position/force control by Raibert and Craig.
2
The original idea behind this approach is to divide the Cartesian task into purely position- and force-regulated DOFs via the selector matrices

with the Jacobian

while the force error is mapped by the transposed force selected Jacobian 9

Although cross couplings are reduced by Fisher and Mujtaba’s approach, it can be shown that force differences still lead to Cartesian velocities interfering with the position controlled DOFs. To minimize these effects, the null space offers meaningful solutions.
Null space solutions
In parallel to the historic development of hybrid position/force control, kinematic solutions for redundant robots emerged, whose number of joints n is larger than the number of DOFs m needed for the task

Building on this projection any cost function

with the control joint velocity
Tactile motion control
Influenced mainly by the works of Walker, Gertz et al. and Chung et al., Schuetz et al. extended (5) by three additional velocity inputs. These result from control in task, joint and null space (

Since the goal of this article is the separation of the task via the null space, it will recap the null space velocity extension

Like Walker, Schuetz et al. reduced the translatory three-dimensional contact phenomena to a one-dimensional equation.
7,22
Consequently, the Jacobian

Schuetz et al. used the transposed Jacobian at the impact point

Combining (8) and (9), the one-dimensional contact relation in Cartesian space at the contact point is obtained.
22
To simplify this equation, the scalar velocity

By applying a linear elastic material law

Solving (11) for the force-driven velocity at the impact point and combining it with the projection from (9), the null space controller is received

Schuetz et al. suggest a linear second order dynamic with the dimensionless damping d and the time constant T to compute the force rate 22

Applying the dynamics of (13) to (12) gives the final control law for the null space force controller

In practice, a 9-DOF manipulator is enabled to reduce forces caused by the collision with its tactile hull. 22,34 However, while this approach is sufficient for handling collision avoidance, it is not designed for persistent contact control or applying forces along multiple directions independently.
Null space divided compliant control
The contribution of this article is to combine the ideas of hybrid motion and tactile motion control. Firstly, the control law of Schuetz et al. is extended to palpate an undefined surface, while modulating forces normal to the plane. The control architecture is then extended to handle force control along multiple directions independently. We propose an additional null space exploitation by switching between position and force prioritization.
Contact control on an undefined surface
To achieve a sustained contact control with the desired dynamics,

Applying the second order dynamics to this force difference and solving for the actual force rate, equation (13) is extended for persisting contact

The scalar force rate at the contact point
The motion around the surface is realized by the position loop in the main task. Therefore, the position-selected Jacobian

Recalculating the null space matrix of this reduced Jacobian

The main difference in the control setup occurs to the null space velocity input

The result can be used as input for any joint control, which shows stable behaviour under the expected loading and velocities. It is only depending on three scalar parameters – time constant T, dimensionless damping d and stiffness c. The algorithm is suitable to palpate and load unknown surfaces or perform processing tasks, which need a modulated contact normal force to the surface. One possible application is painting a planarly defined logo on a curved surface.
Controlling multiple force directions
So far, the introduced framework concentrates on translatory motions on unknown surfaces. Consequently, the force is modulated in the direction of the reference force only. The framework is extended into Cartesian space to regulate forces in all directions. The idea behind this extension is to build a separated set of orthogonal contact control loops by projecting them along their corresponding axis. Therefore, we divide the normal force into a linear combination of its elements

Null space velocity (9) changes to the following formulation and is now related to three direction-dependent and force-driven velocity inputs in Cartesian space

Each of this velocities has its own kinematic variable that analogously calculates equation (10), exemplary shown for

Applying the projection (10) equivalently and inserting the force component in normal direction, the scalar velocities at the tool centre point are resolved with the dynamics from (16)

To analyse the kinematic relation between the joint velocities and the force component, the attained information from (23) and (22) is inserted into (21) exemplary for the y-related values

Hence, it generates higher Cartesian velocities along the axes where the external force component is lower. This is especially useful if contact or resistance forces in the investigated direction exist. Otherwise, it leads to infinite velocities and thus has to be deactivated below a certain threshold

The force-driven joint velocity in null space
Stability
Based on the proof of stability by Sygulla et al. for tactile motion control, the two presented controllers are analysed. 34 Therefore, the dynamics from (16) are modified for contact (19) and multi-force (21) control, differentiated and solved for the corresponding control variable


with the boolean expressions


Both controllers meet the requirements of their designed target dynamics and are stable outside the Jacobian singularities.
Investigation of the decoupling
The proposed framework enables hybrid control on any joint-controlled robot which possesses a sufficient number of joints. This means that the number of joints does at least have to be as large as the dimension of the task space to be able to perform the task. With increasing number of joints, the null space is extended and the performance increases for the task applied to null space. The aim is to achieve a complete decoupling between position and force control in Cartesian space. Hybrid control as introduced by Raibert and Craig appears to offer a decoupled solution at first sight.
2
Yet, by applying the selector matrices

This equation consists of the position-driven and force joint velocity (

This can be proven by the dot product between the two addends which is in general not equal to zero. Therefore, the separation of Fisher and Mujtaba does not lead to orthogonal decoupled velocity components. Both control loops interact with each other within Cartesian space

In contrast to that, null space division implements an orthogonal split. Considering the syntax of the force- and position-driven Cartesian velocities, (18) is rewritten to a more general form

Repeating the projection of the position-selected Cartesian velocity and building the dot product, it can be seen that the velocities are split orthogonally. The dot product between the addends is equal to zero due to the definition of the null space matrix, which is the orthogonal projection of the position-selected Jacobian 26

The orthogonality is also achieved in joint space. 35 Therefore, the dot product of the joint velocities is also equal to zero

Force prioritization
The usage of the null space matrix clearly improves the decoupling between the force and the position loop, but it also filters the magnitude of the signal multiplied with it. Consequently, the control’s main task is prioritized higher than the secondary task. 21 To investigate this effect, a corresponding force-prioritized control architecture is designed. It uses the null space matrix Nf to filter out the position-controlled joint velocities not being orthogonal to the force-regulated ones

The null-space matrix changes according to the force selection of the Jacobian

Here, the force-controlled DOFs are operating in work space. While they have full access over the complete joint space, the position-controlled movements are filtered by Nf . Neither the joint nor the Cartesian velocities are coupled. Their dot product is equal to zero.

Experiments
Different experiments were conducted to gather information about the performance of the introduced control architectures. Their design concentrates on the two following aims: Determination of the contact and multi-force control’s performance handling nonlinear compliant control tasks, and Analysis of the prioritization effects.
The performance is investigated by two different experiments or tasks that both are inspired by the biomechanical behaviour of the human knee joint. While the first experiment is designed to investigate the position-prioritized contact control, the second one is concentrated on the evaluation of the multi-force control and its force/position prioritization.
Evaluation of the contact control
The contact control architecture is analysed during the palpation of an unknown surface. The tested unknown surface is an upscaled 3D-printed tibia (upper surface of the main lower leg bone) which can be assumed as a rigid body and is cornered by rising walls. Instead of a tool, the robot is attached to a femur model (upper leg bone). The setup is shown in Figure 1.

Experimental setup to evaluate the contact control. An additive manufactured femur replica is moved along a rigid oversized tibia plateau, which is cornered by rising edges.
The evaluation task is to move along the shape of a logo on the surface of the upscaled tibia plateau while the compression force normal to the plateau is modulated along the edges. Regarding Cartesian space, this motion is defined by two translatory position-controlled DOFs and by the corresponding null space regulation of the compression force (see Figure 2). The force magnitude is defined to apply continuously varying compression forces in the range from 10 to 50 N in order to maintain contact. The force signal is low pass (PT1) filtered before processing with a time constant of the Cartesian position is changed via pentic splines, pausing at the logo’s corners, with a referenced velocity maximum of 20 mm/s. The task’s execution is visualized in the supplementary video. Although the velocity of the referenced trajectory is relatively high for a contact scenario, the contact control shows accurate position tracking. The maximal Euclidean norm of the position deviation

The contact control’s evaluation task is to move along the surface of a logo, while modulating the perpendicular force along the edges.

Displacement along the z-axis during the task movement. Visualized is the task trajectory

Path-following of the contact control.
Control parameters and quality measures of the contact control task.

Multi-force control with position prioritization
The multi-force control is investigated on the basis of a more comprehensive task. The robot actuates a biomechanical additive manufactured model of the human knee joint. The femur component is rigidly connected to the robot’s tip. The tibia is fixed with the environment. In contrast to the model before, the tibia is original size and non-linearly coupled to the femur via ropes that mimic the collateral and cruciate ligaments (see Figure 5).

Test setup for the multi-force control. The robot is attached to an additive manufactured replica of the human knee joint.
It is necessary to actuate the robot in different Cartesian degrees of freedom in order to identify the biomechanical characteristics of human joint specimens (e. g. range of motion). Loads orthogonal to the actively actuated DOFs have to be minimized. The task is to adjust the flexion angle actively while the force components’ magnitudes are modulated in a range from 10 to 30 N. The position task is a one-dimensional rotation along the knee’s flexion-axis from 0° to 11.5°. The remaining DOFs are used to modify the three-dimensional Cartesian forces in null space. The maximum angular velocity during the applied flexion is 2.75 deg s−1.
The multi-force control is able to handle the described tasks, showing precise tracking (see Figure 6). The maximum flexion error is 0.75°. Its mean is 0.15°. In general, the multi-force control behaves less stable than the contact control does in the other scenario. The force error increases during quicker actuation of the flexion angle compared to non- or low-actuated periods. During the low velocity periods, the force error is reduced to almost zero. All the important measures for this experiment and the concerning control parameters are summarized in Table 2.
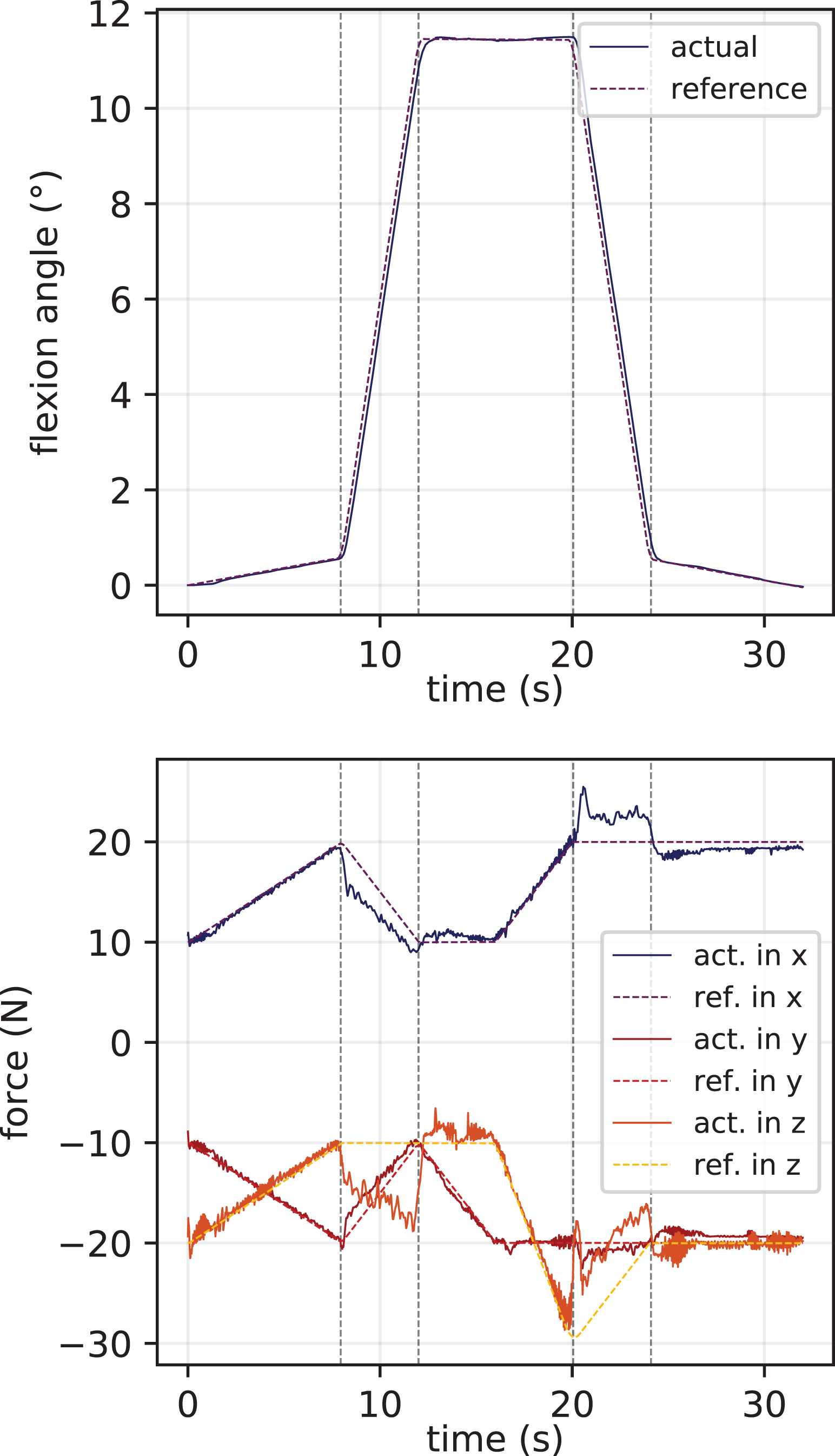
Flexion (above) and force tracking (below) of the multi-force control during the described task.
Parameter and quality measures of the multi-force control experiment.

Comparison between position and force prioritization
In order to identify the influence of force and position prioritization, the previous experiment is repeated under force priority. The task trajectories for force and position control remain identical, yet the flexion is now pursued under null space. The forces are tracked as main task. As expected, this change leads to improved force tracking and less accurate rotation (see Figure 7). As before, the tracking deviations increase during quicker motions. The maximal and the mean force error is reduced significantly to 5.23 and 0.62 N. The position deviation increases moderately to a maximum of 1.45° and a mean of 0.38°. The following two points can be summarized regarding the prioritization: For force prioritization, the force errors remain very low and independent of the position related task. On the other hand, the position errors are especially high during active movement, as the actual control velocity is filtered by the null space matrix. Position prioritization on the opposite performs significantly better regarding the position related tasks. Still, the position error increases proportional to the velocity of the task. As expected, the force errors are significantly higher than with force prioritization.
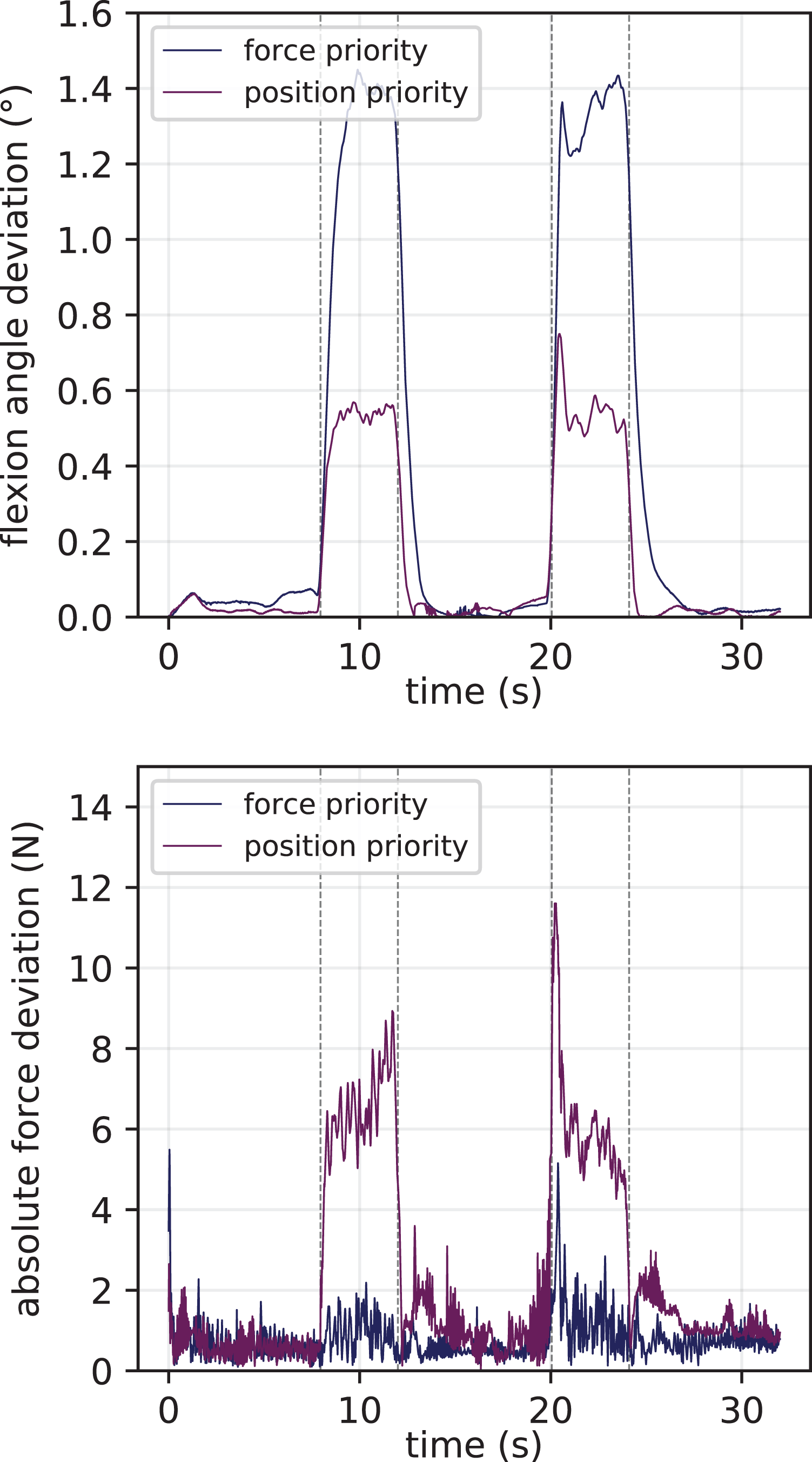
Comparison of the tracking capabilities between position- and force-prioritized multi-force control. The position-errors are shown above. The Euclidean norm of the force error is illustrated below.
The mentioned quality measures are summarized in Table 3.
Quality measures of multi-force control with position prioritization compared to force prioritization.

Bold values represent the primary regulation targets.
Conclusion
In this publication, two new compliant control architectures were introduced based on null space exploitation: contact and multi-force control. They are capable of handling interaction tasks with partially or fully coupled unknown nonlinear systems.
In contrast to some established methods, Jacobian inversion is avoided and no affection by inner singularities occurs. By separating either force or position tasks from the original task space to null space, a redundancy is created that is exploited to increase the robustness and stability of the kinematic velocity projections.
Only few parameters had to be adjusted due to the one-dimensional contact space projections. In consequence, less system parameters are required as for impedance or hybrid control. In addition, Sygulla et al. showed that with the design of appropriate observers parameter tuning can be reduced even further. 34
The introduced control schemes avoid cross couplings when compared to the classical hybrid approaches. 2 The usage of the null space matrix ensures a clear orthogonal split between position and force control. Therefore, the force- and position-driven joint velocities do not interact with each other. The described multi-force solutions offer the opportunity to emphasize either the position or the force task. Depending on the choice of the primary control portion, the secondary goal is pursued in null space. Consequently, the primary goals always prevail. The use of force prioritization offers an interesting approach to control the robot in any direction while remaining stable.
Footnotes
Acknowledgements
The authors would like to thank Fritz Seidl, MA, for interpreting and translating, and proofreading and language editing this manuscript. Furthermore, the authors would like to thank M.Sc. Felix Sygulla and Dr-Ing. Christoph Schütz, who introduced us to null space solutions. Finally, the authors would like to thank Prof. Dr Daniel Rixen for the supervision of Nikolas Wilhelm’s semester thesis, which lead to this control idea and Univ.-Prof. Dr med. Rüdiger von Eisenhart-Rothe for giving us the opportunity to work in orthopaedic research.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the German Research Foundation (DFG) and the Technical University of Munich (TUM) in the framework of the Open Access Publishing Program.
Supplemental material
Supplemental material is available online with this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.