
Abstract
In this study, a new neural observer-based dynamic surface control scheme is proposed for the path following of underactuated unmanned surface vessels in the presence of input saturation and time-varying external disturbance. The dynamic surface control technique is augmented by a robust adaptive radial basis function neural network and a nonlinear neural disturbance observer. Radial basis function neural network is employed to deal with system uncertainties, and the nonlinear neural disturbance observer is developed to compensate for the unknown compound disturbance that contains the input saturation approximation error and the external disturbance. Moreover, the stringent known boundary requirement of the unknown disturbance constraint is eliminated with the proposed nonlinear neural disturbance observer. Meanwhile, to deal with the non-smooth saturation nonlinearity, a new parametric hyperbolic tangent function approximation model with arbitrary prescribed precision is constructed, which results in the transient performance improvement for the path following control system. Stability analysis shows that all the signals in the closed-loop system are guaranteed to be ultimately bounded. Comparative simulation results further demonstrate the effectiveness of the proposed control scheme.
Keywords
Introduction
Path following is one of the typical control scenarios for underactuated unmanned surface vessels (USVs) and other marine vehicles, which can be described as reaching and following a predefined path without temporal constraint. 1,2 However, most common surface vessels are underactuated in sway direction which is not transformable into driftless system. 3,4 Meanwhile, due to the physical outputs of the actuators cannot be unlimited, non-smooth nonlinear constraint of the control effort should be explicitly considered. On the other hand, external environmental disturbance can significantly affect the speed and maneuverability of the vessels, which brings another challenge to the controller design. 5 Nevertheless, several research results have been presented focus on path following control of USVs and other marine vehicles. 6 –10
In Do et al. 6 and Li et al., 7 the path following and point-to-point navigation problems for underactuated surface vessels were addressed, respectively, where the unknown hydrodynamic parameters were estimated by adaptive algorithms. Using backstepping technique and Serret–Frenet frame, the path following control of autonomous underwater vehicles (AUVs) was studied by Lapierre et al. 8 and Zeng et al. 9 In Hu et al., 10 the transient performance improvement for the path following of underactuated surface vessels was investigated based on a robust composite nonlinear feedback controller. Note that in these literature, the parameters of the vehicles were assumed to be known, 8 –10 or the parameters were unknown, while the nonlinearities were considered to be known. 6–7 However, it is difficult to obtain the mathematical model of the vessels accurately, and marine control applications are characterized by complex sea conditions. If the parameter uncertainties are considered, fuzzy logic system/neural network is an effective way to develop approximation-based controllers. 5,11 –15 In Zhang et al., 13 a robust radial basis function neural network (RBFNN) waypoint-based path following control strategy was proposed for marine ships in the presence of multi-obstacles. In Wang et al., 14 an adaptive RBFNN controller was designed for cooperative path following of multiple marine surface vehicles (MSVs) subject to dynamical uncertainties. In Park et al., 15 RBFNN-based output feedback control law was developed for trajectory tracking of underactuated surface vessels. However, with conventional RBFNNs, differentiation of those RBFs will cause the problem of computational complexity. To solve this problem, the dynamic surface control (DSC) technique with a first-order filtering of the synthetic input has been employed for tracking control of strict-feedback uncertain systems, 16 for formation control of autonomous surface vehicles, 17 and for path following control of underactuated ships. 18
Input saturation exists in almost every practical system since the magnitude of the control input cannot be unlimited due to the actuator physical constraint. The saturation nonlinearity can severely degrade the performance of the control system by causing undesirable inaccuracy, oscillations, and even instability, 19,20 thus must be taken into consideration in the controller design. In Chen et al., 21 an auxiliary design system was employed to mitigate the input saturation nonlinearity, and its states were used for adaptive tracking control of an uncertain multi-input and multi-output (MIMO) nonlinear system. Based on the auxiliary design system scheme, the input constraint problems have been addressed for the path following control of USVs, 22,23 and for position mooring control of marine vessels. 24 Different from the auxiliary system method, the input saturation problem for a single input uncertain system was studied by employing a hyperbolic tangent function to approximate the saturation nonlinearity. 25 Later, the function approximation-based model proposed by Wen et al. 25 has been extended to numerous control systems with input saturation. 26,27 By using neural network (NN), DSC, and Gaussian error function approximation methods, the tracking control for a class of nonlinear strict-feedback systems in the presence of unknown direction control gains and input saturation was investigated by Ma et al. 26 In Zhou et al., 27 an approximation-based adaptive controller was presented for MIMO nonlinear systems exposed to saturation nonlinearity. In Huang et al., 28 the authors addressed global stabilization control of an underactuated ship subject to input saturation, and the mean-square errors are guaranteed to be arbitrarily small. It is worth noticing that, although numerous research results have been presented for surface vessels control with input saturation, 22 –24,28 little attention has been paid to the saturation approximation accuracy improvement in the vessels exposed to saturation nonlinearity.
The control approach based on disturbance observer can enhance the robustness of the system subject to external disturbance. In recent years, various disturbance observers have been developed to construct robust controllers in different fields, see for instance. 29 –33 By using disturbance observer-based control (DOBC) method, disturbance attenuation and rejection problem for a class of MIMO nonlinear systems was studied by Guo and Chen. 29 In Wei et al., 30 a composite control scheme combing DOBC and terminal sliding mode control (SMC) was proposed for uncertain structural systems. Based on DOBC method, the SMC problem of system with mismatched uncertainties was investigated by Yang et al. 31 In Cui et al., 32 adaptive SMC and DOBC techniques were employed to solve the attitude control problem for AUVs with unknown disturbance and input nonlinearities. In Liu et al., 33 model predictive control (MPC) with DOBC was presented for the path following of USVs with environmental disturbance. However, in most of these references, the disturbances were assumed to change slowly which means that the derivatives of the disturbances were considered to be zero. As for USVs, marine environmental disturbance is quite complex in which wind, waves and ocean currents are coexisting. 34 Therefore, considering that the disturbance is slowly time-varying seems restrictive in practical. Meanwhile, when the input saturation problem is also considered, it will result in a time-varying compounded disturbance which comprises the saturation approximation error and the external disturbance. Therefore, DOBC should be further investigated for the USVs in the presence of both input saturation and unknown time-varying disturbance.
Motivated by the abovementioned discussion, this article further investigates the particular control problem of path following for underactuated USVs in the presence of model uncertainties, input saturation, and unknown time-varying disturbance. To simultaneously tackle these problems, a nonlinear neural disturbance observer (NNDO)-based DSC scheme is developed. The DSC technique is employed to overcome the differential explosion inherent in the conventional backstepping design. Considering that the hydrodynamic parameters of the USV are completely unknown, RBFNN is introduced for model approximation and designing the NNDO. The developed NNDO can precisely estimate the unknown time-varying compounded disturbance containing the saturation approximation error and the external disturbance, and its output is utilized to construct the robust control system. Especially, slow change and known upper boundary restrictions are relaxed for the designed NNDO. Meanwhile, instead of using the commonly used hyperbolic tangent function, 25 the non-smooth saturation nonlinearity is approximated by a new parametric hyperbolic tangent (PHT) function model, which can approximate the saturation nonlinearity with arbitrary accuracy. Closed-loop system stability is analyzed via Lyapunov method, which shows that all the signals in the path following control system are guaranteed to be ultimately bounded. In the end, comparative simulation results are presented to demonstrate the effectiveness of the proposed control approach.
The organization of this article is as follows: the “Problem formulation and preliminaries” section presents the model of the underactuated USV, briefly introduces the RBFNN and describes the control objective. In the “The control system design” section, the NNDO-based DSC path following control scheme is proposed, and the stability analysis of the closed-loop system is given. The “Simulations and discussion” section provides the comparative simulation results to illustrate the effectiveness of the proposed control method. The “Conclusions” section concludes this article.
Problem formulation and preliminaries
The underactuated USV modeling
To address the horizontal motions of an underactuated USV, the states of the vessel can be described by

where

with

where

with

In this article, the hydrodynamic parameters of the vessel are considered to be fully unknown, therefore
Assumption 1
The USV dynamic system is input-to-state stable (ISS). 25
Remark 1
For a practical USV plant, assumption 1 is certain. Since there does not exist any saturation control input that can globally stabilize an unstable system.
Assumption 2
There exist unknown positive constants
Assumption 3
The sway velocity v is passive-bounded.
Remark 2
In practice, the external disturbances
Neural network approximation
In this article, to deal with the system uncertainties, RBFNN will be employed to approximate the unknown nonlinear dynamics in equations (4) and (5). RBFNN has a good capability in function approximation and can be described as follows 36

where

where

where

The path following control objective
In this research, the reference path is assumed to be generated by a virtual vessel and is formulated as

where all the variables have the same meanings as system (4) and (5), and the states xd
,
Considering that an underactuated USV in the presence of actuator saturation and unknown external disturbance is given by equations (4) and (5), and the reference path is generated by equation (10), the path following control objective is to develop an NNDO-based DSC scheme for surge force τu and yaw torque τr , such that the USV can follow closely the virtual vessel that moves along the desired path.
The control system design
In this section, the NN-based DSC scheme using NNDO is proposed for the path following control of an underactuated USV to eliminate the effects of the input saturation and unknown external disturbance. By employing a PHT function model with arbitrary approximation error to approximate the input saturation nonlinearity, the dynamics equation of the USV is transformed into a regular form. Then, the robust controllers for position and heading track are developed, respectively, which ensure the closed-loop signals ultimately bounded convergence. The detailed design process is described as follows.
The saturation approximation law
One can see from equation (3) that there is a sharp corner when

where

Remark 3
Notice that the saturation approximation model in this article is more flexible than the commonly used hyperbolic tangent function
To better show the proposed saturation approximation law, the comparison between the common hyperbolic tangent (CHT) function 25 and the PHT function with different φ is illustrated in Figure 1.

The comparison between the CHT function and the PHT function. CHT: common hyperbolic tangent; PHT: parametric hyperbolic tangent.
Considering the saturation approximation model (11), the surge and yaw dynamics of the USV can be augmented as follows

Notice that system (13) still makes it difficult to implement the backstepping approach, because

where

Then, the uncertain nonlinear system (13) can be rewritten in the following regular form

where gi
is the unknown control gain function and
Remark 4
Considering assumption 1 that the vessel dynamics is ISS, therefore the surge velocity u and the yaw rate r in equation (16) are bounded, and the control signal
Remark 5
Recalling assumption 2, the external disturbances and their time derivations are bounded. Meanwhile, the time derivations of
The path following controller
Design of the position track control
Since the path following control objective is forcing the real USV approach a virtual vessel, the position and heading track error variables are introduced and are defined as

where

The graphical description for the path following of the USV is depicted in Figure 2.

Principle of the path following for the USV. USV: unmanned surface vessel.
In this article, the position track error ze
is designed to be stabilized by the surge force

Choose the surge speed u as a virtual control and design it as

where k1 and δe are positive design parameters.
It is noted that the virtual control αu
is not defined at
To avoid repeatedly differentiating αu in the following design procedure, which leads to the so-called explosion of complexity, the DSC technique 37 is employed here. Let the virtual control αu pass through a first-order filter βu with time constant Tu , it follows that

Define

where Bu is a continuous function and has a maximum value Mu . 16 Then, considering equations (20) and (21), one can obtain that

Define the Lyapunov function candidate as

invoking equations (23) and (24), the time derivative of V 1 is given by

where
Considering the surge speed dynamics in the transformed system (16), the time derivation of

Defining a function

where

where

where

with
As mentioned in the above subsection,

where
Define the auxiliary variable χu as

where

where

Based on the auxiliary variable χu
, the NNDO for

with ϖu
being the intermediate variable. Define the NNDO estimation error as
Design of the heading track control
Differentiating ψe with respect to time, it follows that

Let

where

where Tr
is a time constant, and βr
is the filter signal. Define

with Br being a continuous function and bounded by Mr . Then the yaw error dynamics becomes

Define the Lyapunov function candidate as

we have
where br is a small positive constant.
Considering the yaw dynamics in the transformed system (16), the time derivation of

Defining a function

where

where

where

with
To avoid repetition of the NNDO design description, this step directly gives the results of

where

Therefore, the time differentiation of χr
and

Stability analysis of the closed-loop system
With the above controller design, we now give the following main result of this article.
Theorem 1
Consider an underactuated USV represented by equations (4) and (5) in the presence of system uncertainties, input saturation, and unknown external disturbances satisfying assumptions 1 to 3, the predefined path is generated by equation (10), the virtual controllers are designed as equations (21) and (39), the dynamic controllers are proposed as equations (29) and (47), the RBFNN weight update laws are chosen as equations (30), (34), (48), and (51), and the NNDOs are developed as equations (33), (36), and (50). Then, given any positive constant p, for all initial conditions that satisfying

the control parameters
Proof
Consider the convergence of the error states in the closed-loop system, the Lyapunov function candidate of the whole control system is chosen as

Differentiating

Recalling equations (28), (35), (37), (46), and (52), we have



where

Substituting equations (26), (44), and (56) to (59) into equation (55), and using the facts that

the time derivative of V becomes

where σ and η are positive constants that satisfy


It can be seen from equations (62) and (63) that if the corresponding design parameters are tuned such that

Then, the following inequality holds

Therefore V is convergent, and we have
Remark 6
Notice that the USV dynamics in equations (4) and (5) is coupled by surge, sway, and yaw motions. However, in view of the fact of assumption 3, the vessel’s surge and yaw motions can be treated independently. Therefore, the USV’s dynamic equation can be transformed into system (16) which contains two well-known strict-feedback subsystems, thus the feedback control law is convenient to be derived and the NNDO can be employed to improve the disturbance rejection ability of the closed-loop system.
Remark 7
In this article, the external environmental disturbance is considered to be unknown and time-varying during the path following controller design, which is more practical and critical than assuming that the disturbance changes slowly. To compensate for the disturbance force, an NNDO is developed to construct the robust controller. Moreover, the requirement of known boundary of the external disturbance has been eliminated, and the estimation error is guaranteed to be uniformly bounded.
Simulations and discussion
In this section, numerical simulation results are presented to demonstrate the effectiveness of the proposed NNDO-based DSC path following control scheme. The model parameters of the USV are given by Do et al.
38
The reference path is selected as an S-curve path which has a changeable curvature. For the path generation, the initial states of the virtual vessel are
To better show the performance of the developed saturation approximation model, two controllers are implemented with the CHT function and the new PHT function, respectively. The maximum control inputs of the USV are considered as τuM
= 30 N and
To verify the performance of the designed NNDO, two scenarios of the time-varying external disturbances induced by wind, waves, and ocean currents are considered. It should be noticed that the practical environmental disturbances may be different, we choose the following types of disturbances mainly for simplicity of generating. Meanwhile, the known boundaries of the disturbances are not required for the proposed NNDO.
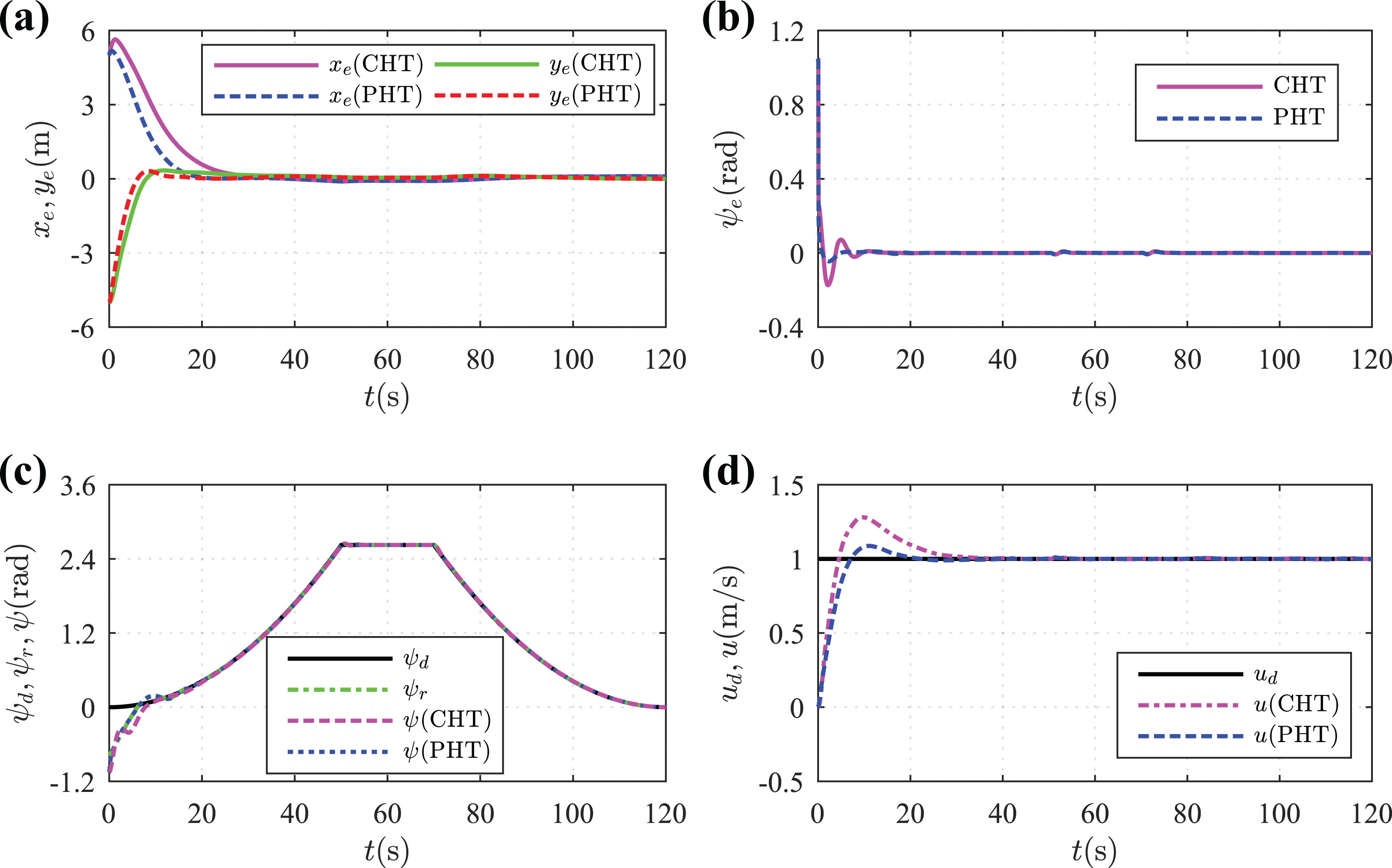
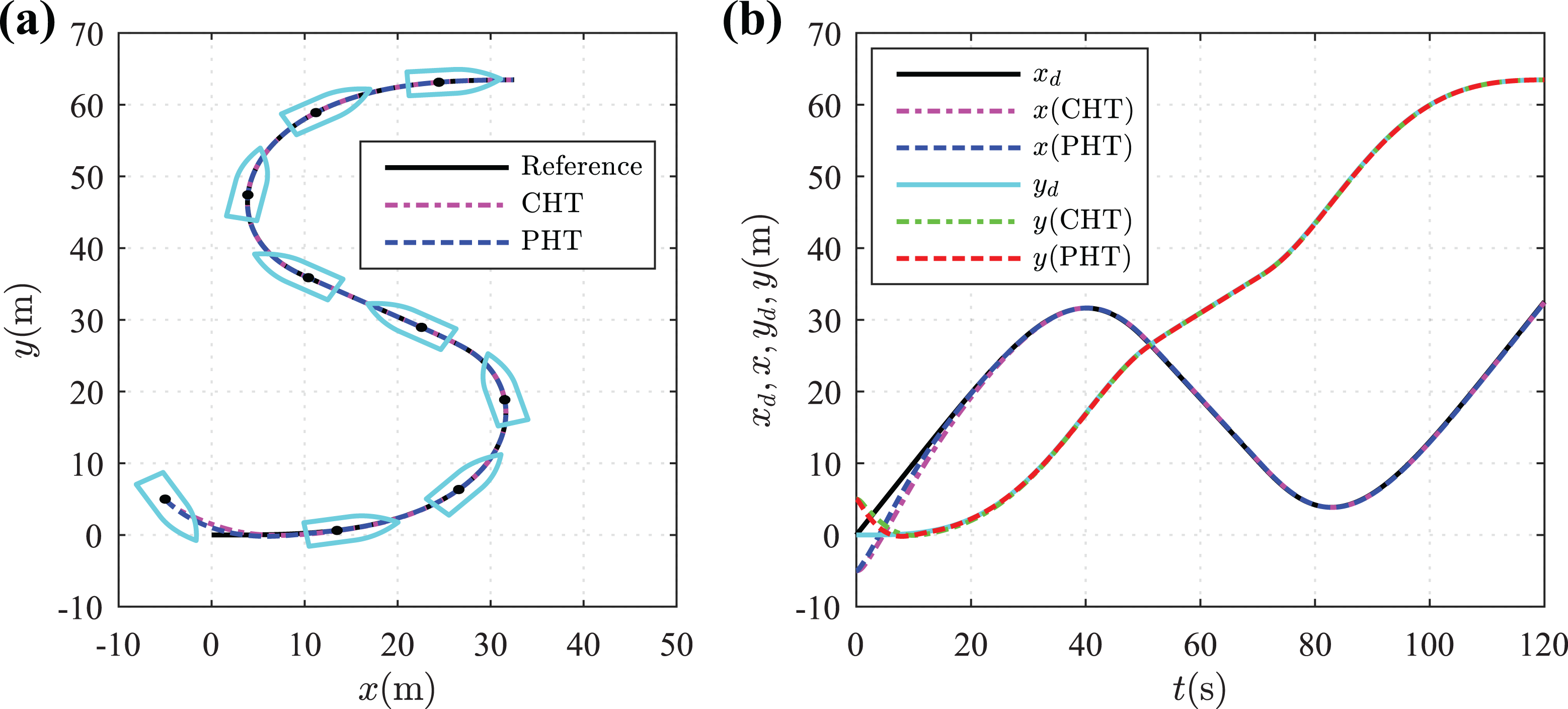
The comparative simulation results are shown in Figures 3 to 7. Figure 3(a) shows the USV trajectories of the two controllers, where the “Cyan vessel” describes the real-time position and pose of the USV using PHT function model. Figure 3(b) shows the details of the position variations during the path following. It reveals that the two controllers can successfully force the vessel to follow the predefined path, while the proposed PHT method achieves a better transient performance. This conclusion can be further confirmed from the path following tracking error convergences in Figure 4. Figure 4 shows the convergences of the position, heading angle, and surge speed tracking error. The maximum overshoots of x, y, ψ, and u with CHT method are 2.06%, 6.43%, 17.42%, and 26.18%, respectively. The corresponding maximum overshoots with PHT method are 1.97%, 6.27%, 4.51%, and 7.64%, respectively. The settling times of x, y, ψ, and u with CHT method are 38.4 s, 47.6 s, 13.2 s, and 33.5 s, respectively. The corresponding settling times with PHT method are 22.8 s, 24.7 s, 6.4 s, and 25.6 s, respectively. This confirmed that the system states with the proposed PHT method have less overshoots and faster convergences compared with that of CHT method. Figure 5 gives the control performance index of integral absolute error (IAE) of the heading track error ψe
and the resultant position track error ze
−δe
, where the IAE is defined as

The path following control results with composite wave disturbances.
The comparison of the tracking errors with composite wave disturbances.

The comparison of the IAEs of heading track error and position track error with composite wave disturbances. IAE: integral absolute error.
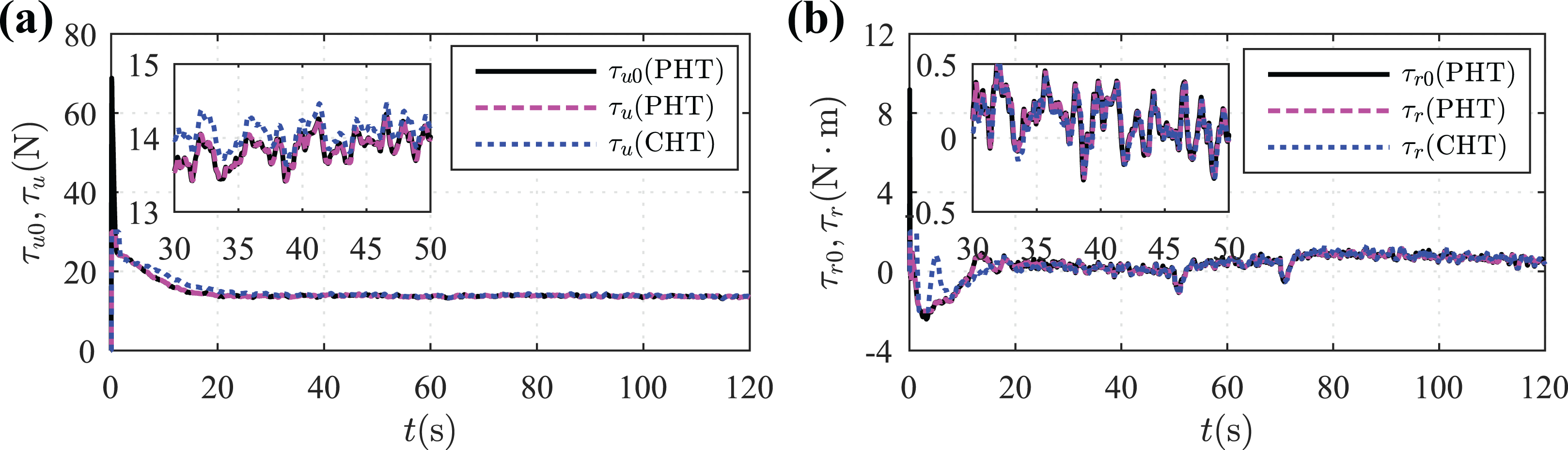
The PHT method achieves a better transient performance than the CHT method, mainly because the PHT approach can approximate the saturation function with an arbitrary approximation error by adjusting the parameter ϕ, which will indirectly optimize the transient performance. In Figure 6, the control input signals of the two methods are provided and are bounded in specified regions, where the PHT method obtains more smooth constrained control efforts τu and τr . Figure 7 shows the estimations of the compound disturbances and the convergence of the auxiliary variables. One can see that the NNDO outputs can efficiently update varying with the compound disturbance. Therefore, the validity of the designed NNDO is confirmed.

The comparison of the control inputs with composite wave disturbances.

The estimations of the compounded disturbances and the convergence of the auxiliary variables with composite wave disturbances.

where wu , wv , and wr are zero-mean Gaussian white noise processes, lu , lv , and lr are positive constant parameters. In this scenario, stochastic disturbances will be generated to verify the performance of the proposed control scheme.
The comparative simulation results with stochastic disturbances are shown in Figures 8 to 12. From Figures 8 to 11, one can see that the proposed PHT method still achieves better tracking performances and more smooth control input signals in the presence of stochastic external disturbances. In Figure 12, the estimations of the NNDO well follow the mean values of the true compounded disturbances, and the auxiliary variables still have a good convergence. This means that the stochastic disturbances do not deteriorate the overall performance of the proposed control system, and the robustness is further confirmed.
The path following control results with stochastic disturbances.

The comparison of the tracking errors with stochastic disturbances.

The comparison of the IAEs of heading track error and position track error with stochastic disturbances. IAE: integral absolute error.
The comparison of the control inputs with stochastic disturbances.

The estimations of the compounded disturbances and the convergence of the auxiliary variables with stochastic disturbances.
Conclusions
In this article, an NNDO-based DSC path following control scheme for underactuated USVs has been developed. The proposed new control method has the ability to overcome the differential explosion problem and deal with the system uncertainties, input saturation, and unknown external disturbances. Moreover, by employing a PHT function model to approximate the saturation nonlinearity with arbitrary precision, the transient performance of the path following controller has been improved. Meanwhile, considering the input saturation approximation error and the unknown external disturbance, an NNDO with the accurate estimation of unknown time-varying compounded disturbance is developed to enhance the robust performance of the control system. It has been proved that all the tracking errors of the closed-loop system are ultimately bounded. Comparative simulation results of curved-path path following with different types of external disturbances have been presented to confirm the effectiveness of the proposed control approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science and Technology Major Project of China [no. 2015ZX01041101], the National Natural Science Foundation of China [nos 51509057, 51509054, and 51709214], and the Fundamental Research Funds for the Central Universities [HEUCF180102].