
Abstract
This article presents a robust composite neural-based dynamic surface control design for the path following of unmanned marine surface vessels in the presence of nonlinearly parameterized uncertainties and unknown time-varying disturbances. Compared with the existing neural network-based dynamic surface control methods where only the tracking errors are commonly used for the neural network weight updating, the proposed scheme employs both the tracking errors and the prediction errors to construct the adaption law. Therefore, faster identification of the system dynamics and improved tracking accuracy are achieved. In particular, an outstanding advantage of the proposed neural network structure is simplicity. No matter how many neural network nodes are utilized, only one adaptive parameter that needs to be tuned online, which effectively reduces the computational burden and facilitates to implement the proposed controller in practice. The uniformly ultimate boundedness stability of the closed-loop system is established via Lyapunov analysis. Comparison studies are presented to demonstrate the effectiveness of the proposed composite neural-based dynamic surface control architecture.
Introduction
In recent years, the development of unmanned marine surface vessels (MSVs) has received increased attention in many marine activities, including military reconnaissance, environmental monitoring, seabed mapping, and submarine pipelines inspection. 1 –3 To accomplish these tasks, path-following operation is usually needed for MSVs. However, the critical working environment where wind, waves, and ocean currents are existing can significantly affect the speed and maneuverability of the vessels. 4 This makes precise path following challenging for the control system design. On the other hand, as one type of marine robots, unmanned MSV is required to have automatic control ability in complex marine environment. Therefore, advanced control strategy should be further investigated for the path following of MSVs.
The main purpose of path following is to make the controlled plant reach and follow a predefined path without temporal constraint. 5 So far numerous research results have been presented focus on path following of wheeled mobile robots, 6 –9 aerial vehicles, 10,11 underwater snake robots, 12 autonomous underwater vehicles (AUVs), 13,14 and MSVs. 15 –20 The literature on path following control of land and aerial vehicles is much richer; however, the obtained results cannot directly work for the marine robots. The main difficulty is due to the fact that most marine vehicles are underactuated with nonintegrable dynamics which is not transformable into a driftless system. For the marine robots, the main disturbance for underwater vehicles is ocean current while MSVs can suffer from all the wind, waves, and ocean currents that are more fascinating for researchers. In the presented path-following control results for MSVs, 15 –20 backstepping technique has been widely addressed because it provides a systematic framework for the design of tracking and regulation strategies. It should be noted that these controllers were under the assumption that the hydrodynamic parameters were precisely known, 16 –20 or the parameters are unknown but linear with respect to some known nonlinear functions. 15,17 However, it is difficult to obtain the mathematical model of the vessel accurately. Meanwhile, marine control applications are characterized by time-varying external disturbances and complex sea conditions. Therefore, considering that the vessel model is precisely known or the system uncertainties are in linearly parameterized forms is restrictive in practice. For system with high uncertainties, fuzzy logic system (FLS) and neural network (NN) techniques with the universal approximation ability have been used for backstepping-based tracking control of mobile robots, 21,22 AUVs, 23,24 and MSVs. 25,26 By employing FLS, backstepping and sliding mode control techniques, an adaptive robust path-following control scheme was proposed for an underactuated AUVs with parameter uncertainties and current disturbances. 23 FLS control in combination with a nonlinear guidance law was proposed by Yu et al. 24 for three-dimensional (3-D) path following of AUVs subject to uncertainties. A robust adaptive radial basis function NN (RBF NN) control approach was presented by Zheng and Sun 25 for the path following of an unmanned MSV with system uncertainties and input saturation. In the work of Zhang et al., 26 the robust NN control method was extend to the waypoints-based path-following control of underactuated surface ships with obstacles avoidance.
With conventional backstepping design, there exists the problem of explosion of complexity. It is caused by the repeated differentiations of the virtual controls. Furthermore, when the RBF NN technique is introduced, one needs to take derivatives of these RBFs, which will further increase the computational burden of the control system. This drawback can be overcome using the dynamic surface control (DSC) method, in which the derivative of the virtual control is obtained through a first-order filter. 27 By employing the NN-based DSC (NDSC) method, a class of pure-feedback nonlinear system with unknown dead zone and perturbed uncertainties was studied. 28 A fuzzy DSC (FDSC) controller was proposed by Chen et al. 29 for nonlinearly parameterized systems using a Fourier series expansion to model unknown periodic disturbances. The control problem of maintaining prescribed performance for multiple input and multiple output systems was addressed by Sun et al. 30 using a modified NDSC approach. For surface vessels and other vehicles, DSC technique has been applied to several control scenarios. 31 –34 By introducing the DSC method in each of the kinematic and dynamic linearization law design, a global tracking control structure for underactuated ships with input and velocity constraints was presented by Chwa. 31 An adaptive leader–follower formation controller using NDSC technique was presented by Peng et al. 32 for autonomous surface vehicles with uncertain dynamics. Based on a robust adaptive NDSC, the path-following control problem of underactuated ships was addressed by Zhang and Zhang. 33 Later, the DSC technique was extend to the containment maneuvering of marine surface vehicles moving along multiple parameterized paths. 34
It is worth mentioning that, although significant development has been made in the FDSC/NDSC designs, 28 –34 the original intention using FLS/NN to approximate the system uncertainty is missing. In order to obtain a better control performance, the nonlinear functions should be approximated by the FLS/NN more precisely. However, the abovementioned literatures mainly focus on the asymptotic stability and tracking, and little attention has been paid to the precision improvement of identifying models. On the other hand, a common weakness of these approximation-based control approaches 23 –34 is that the scale of the adaptation laws depends on the number of the FLS rule bases or the NN nodes. To guarantee a better approximation result, the number of the parameters to be tuned online can be very large, which will make the learning time become unacceptably long for the implement in practice. Therefore, a more concise approximation-based control structure should be developed to effectively reduce the number of the learning parameters.
Motivated by the abovementioned observations, this article addresses both the performance improvement and the realizability for path-following control of unmanned MSVs in the presence of system uncertainties and unknown time-varying disturbances. To simultaneously solve the two problems, a new kind of composite NDSC (CNDSC) path-following control scheme is proposed. The main contributions of this article are summarized as follows: (1) By employing the DSC technique, the problem of explosion of complexity is eliminated effectively. (2) Different from the existing NDSC methods in which only the tracking errors defined between the system states and their desired values are commonly used for NN weight updating, the proposed CNDSC uses both the tracking errors and the prediction errors to update the NN parameters. The prediction errors are derived from the differences between the states and the state estimation models, which can provide extra information for NN parameter learning. Thus, better tracking performance is achieved. (3) Although the RBFs are introduced in the NN control structure, only one adaptive parameter is needed to be updated online. This makes the path-following controller easier to be implemented from the practical application viewpoint. (4) Closed-loop system stability is established using the Lyapunov method, which shows that all the signals are uniformly ultimate boundedness (UUB).
The rest of this article is organized as follows: “Problem formulation” section presents the model of the unmanned MSV, briefly introduces the RBF NNs, and states the control objective. In the “The CNDSC scheme” section, a robust CNDSC path-following scheme is proposed, and the stability analysis is given. “Simulation results and discussion” section provides the comparative simulations to verify the proposed control approach. “Conclusion” section concludes this article.
Problem formulation
The unmanned MSV model
To address the motions of the MSV on the horizontal plane, the states of the vessel are given by the vector


where

The matrix




Notice that the unmanned MSV studied in this article is equipped with one thruster and one rudder; therefore, the vessel is underactuated because it lacks a direct lateral control input. Furthermore, for all port-starboard symmetric vessels, the location of the body-fixed frame {b} can be chosen such that

with




where m11, m22, m23, m32, m33, d11, d22, d23, d32, and d33 are the vessel inertia and hydrodynamic damping parameters, respectively, which are all assumed to be completely unknown;
It is worth noting that the expression of the vessel model (8)–(12) is different from that in the study by Zeng et al. 13 and Moe et al. 35 In the previous works, 35,13 only the ocean current disturbance is considered and assumed to be constant and irrotational, thus the kinematic and dynamic equations can be represented by the relative velocities. However, this assumption is too idealized for the real marine environment to satisfy because the sea condition is complex and changeable. In this article, we consider a more strict and practical environmental condition that containing wind, waves, and ocean currents; therefore, absolute velocities are used for vessel modeling.
To facilitate the control system design, the following assumptions are introduced and will be used in the subsequent developments.
Assumption 1
The external disturbances are bounded by unknown positive constants
Remark 1
This article mainly considers the natural environment disturbances induced by wind, waves, and ocean currents, while the disturbance caused by other objects such as a sudden passing by unknown objects ahead of the vessel is not considered. In practical marine environment, the external disturbances
Assumption 2
The function Y(u) is negative definite, thus there exists positive constant Ymin such that
Remark 2
Assumption 2 is certain for commercial vessels by design, since Y(u) ≥ 0 would imply that the sway direction of the vessel is undamped or nominally unstable.
Assumption 3
The sway velocity
Remark 3
This assumption is always satisfied for common surface vessels, and the passive-boundedness of the sway motion has been proofed and discussed systematically according to different types of vessels’ sway dynamics in previous literature. 17
The NNs
In this research, since the nonlinear functions in equation (8) are considered to be completely unknown and cannot be linearly parameterized, RBF NNs will be employed to deal with the system uncertainties.
As a powerful tool for function approximation, RBF NN can approximate any unknown and continuous function f(

where

with the weight vector

where
The control objective
In this article, the desired path is assumed to be generated by a virtual vessel without considering the obstacle avoidance problem, which can be formulated as

where all the states have the same meanings as system (8)–(12), and the variables
Considering that an underactuated MSV in the presence of system uncertainties and unknown external disturbances is represented by equations (8) –(12), and the reference path is generated by equation (16), the path-following control objective is to develop a robust CNDSC scheme for the surge force τu and yaw torque τr such that the MSV can follow closely a virtual vessel that moves on the predefined path, and all the signals of the closed-loop system are guaranteed to be UUB.
The CNDSC scheme
In this section, a robust CNDSC design for the path following of unmanned MSVs is proposed. For the control system, virtual controls for u and r are firstly designed on the kinematic level and are treated as the reference signals to the dynamic subsystem. Then, dynamic controllers for τu and τr are developed using DSC and CNN techniques. In the end, the stability of the closed-loop system is analyzed.
Control system design
Step 1. Define the position and heading track error variables between the virtual vessel and the real vessel as follows

where xe and ye represent the components of the position track error along On − xn and On − yn axes in the inertial frame {n}, ze denotes the resultant position track error, that is, the distance from the target point to the real vessel, and ψe is the heading track error with

and it follows that

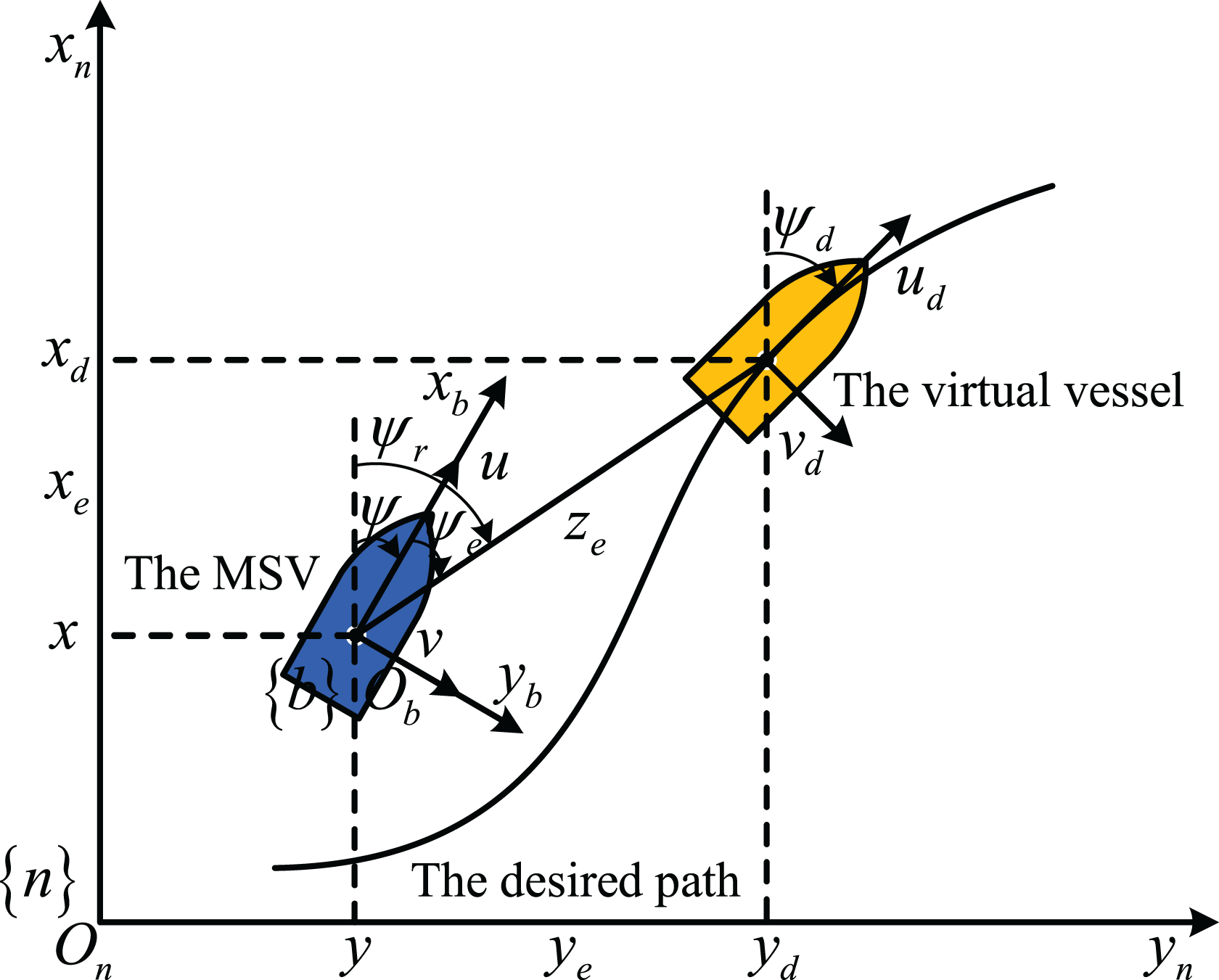
Principle of the path following for MSVs. MSV: marine surface vessel.
Considering equations (8), (17), and (19), and differentiating ze and ψe with respect to time, it gives

In order to eliminate the position and heading track errors, u and r are considered as immediate control signals, and the corresponding virtual controls for u and r are designed as

where k1, k2, and δe are positive design parameters.
Remark 4
It can be seen that the virtual control αu in equation (21) is not defined at
To avoid repeatedly differentiating αu and αr, which leads to the so-called explosion of complexity in the following step, the DSC technique is employed here. Let αu and αr pass through two first-order filters βu and βr, respectively, it follows that

where Ti is the time constant. Define


with Bi being the continuous function and has a maximum value Mi. 37 Then, substituting equation (21) into equation (20), it gives

Considering the position track error, the heading track error, and the filtering errors, choose the Lyapunov function candidate as

Then, considering equations (23) to (25), the time derivative of V1 is obtained as

where
Step 2. Differentiating ue and re with respect to time, it follows that

Defining two functions

where

Since

where ki > 0 is a design parameter.

Define

where λi > 0 is a design parameter. The prediction error signal zinn employed here is aimed to construct the update law design of the CNN parameter, and the learning algorithm for

where
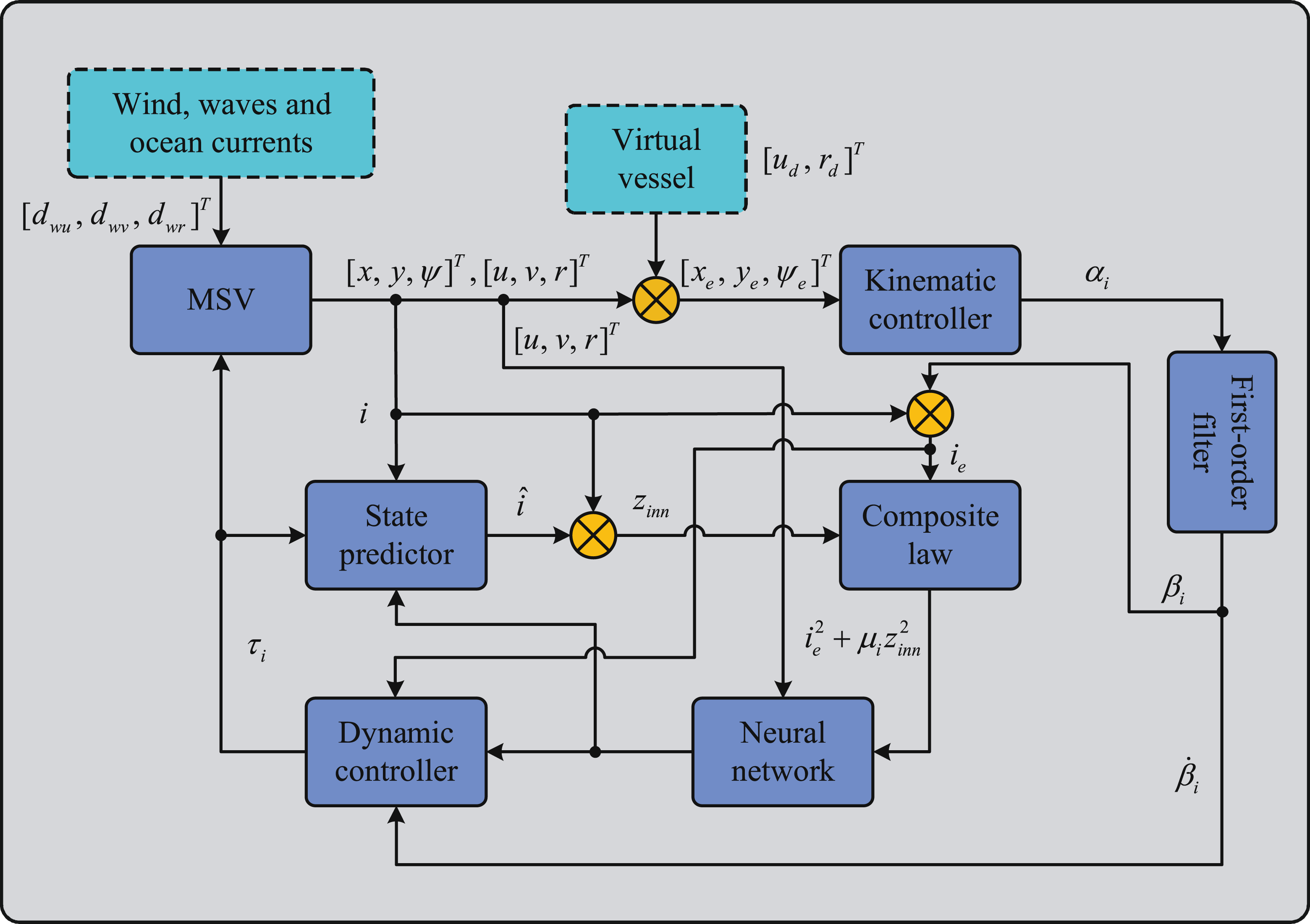
Visualization of the path-following control system.
Define the estimation error of the NN parameter to be

Invoking equations (32) to (34), it follows that



Then, considering equations (36) to (38), the derivative of V2 is obtained as

According to the following facts

one has

Remark 5
The adaptive law of the composite NN is constructed by the tracking error ie and the prediction error zinn. Since an extra information provided by the prediction error is used to identify the system uncertainties, the improved function approximation and fast adaption ability can be obtained.
Remark 6
In the proposed NN structure, the norm of the weight vector is chosen as the adaptive parameter instead of the elements of the weight vector, thus the number of the parameters need to learn online for each NN is reduced to one. Therefore, the calculation burden is lightened considerably.
Main result
So far, we have finished the CNDSC path-following controller design. The main result of the closed-loop system performance can be summarized in the following theorem.
Theorem 1
For an underactuated MSV given by equations (8) to (12) with system uncertainties and external disturbances satisfying Assumptions 1 to 3, the predefined path is generated by equation (16), the kinematic controller is developed as equation (21), the dynamic control law is proposed as equation (31), and the composite NN adaptive laws are designed as equations (33) and (34), then all the closed-loop system signals
Proof
Consider the Lyapunov function candidate of the whole control system as

Differentiating V with respect to time and considering equations (27) and (41), it follows that

It is true that

where the quantities ξi and ϖi are small positive constants. Then, we have

with

where the positive constants
Therefore, if the control parameters are appropriately chosen such that





Remark 7
In the developed CNDSC scheme, the design parameters k1, k2, ρi, ki, λi, κi, and ηi should be tuned to obtain good transient and closed-loop stable performances. By increasing k1, k2, ρi, ki, and λi, the tracking errors and prediction errors can be made arbitrarily small. As for the control gains of the NN adaptation law, decreases in κi or increases in ηi will achieve a better tracking performance.
Simulation results and discussion
In this section, comparison numerical simulation results are presented to illustrate the performance of the proposed path-following control strategy. The model of the vessel is given by Fredriksen and Pettersen, 38 and the control objective is to make the MSV follow closely a virtual vessel along the desired path. The virtual vessel is characterized by the predefined surge speed ud and yaw rate speed rd, where ud is the desired cruise speed of the vessel, and rd is mainly used for shaping the path. For the computer simulation purpose, the unknown time-varying disturbances induced by wind, waves, and ocean currents are produced by means of the following first-order Gauss–Markov processes 39

where wu, wv, and wr are zero-mean Gaussian white noise processes, cu, cv, and cr are positive constant parameters. For the generated disturbances dwu, dwv, and dwr, it can be validated that Assumption 1 is satisfied.
To better show the effectiveness of the controller proposed in this article, the comparison studies are performed with the basic DSC (BDSC) and the NDSC methods. The BDSC is a model-based approach, which depends on the accurate mathematical model of the vessel, and the control system are designed as

The NDSC method employs DSC and RBF NN techniques, where the NN adaption law is built based on the tracking error and using the weight vector. The controller using the NDSC scheme is formulated as follows

For the proposed CNDSC scheme, the kinematic controllers are designed as equation (21), the first-order filters are chosen as equation (22), the dynamic controllers are proposed as equation (31), the state predictors are developed as equation (33), and the NN updating laws are designed as equation (34).
Comparative analysis
In the following simulations, the initial states of the virtual vessel are set as
In order to sufficiently verify the performance of the proposed path-following control scheme, two types of paths are considered. The first one is the path with straight line and circle, which has been commonly used to test the path-following controllers. 17,25,26 The second one is an S-curve path proposed in this article, which has a time-varying curvature. This is a stricter condition than the straight line or circle path since both the magnitude and direction of the path curvature are changeable.
Case 1. In this case, the desired surge and yaw rate speeds of the virtual vessel that produce the reference path are chosen as follows
The path-following control results of the BDSC, NDSC, and CNDSC approaches are presented in Figures 3 and 4, showing the tracking performance. Among them, Figure 4 also shows the abilities of the three controllers to deal with the parameter uncertainties that is the MSV has 30% parameters perturbation after t = 100 s. From Figures 3 and 4 with local zooms, it is clearly demonstrated that the proposed CNDSC scheme achieves faster convergence and improved tracking accuracy. Especially in Figure 4, one can see that the NDSC and CNDSC methods are less sensitive to parameters than the BDSC method, where the CNDSC still obtains a better tracking accuracy. The “blue vessel” intuitively describes the real-time position and heading angle of the MSV with the CNDSC scheme. It can be seen that the MSV can produce an adaptive sideslip angle to compensate for the drift force induced by the time-varying environmental disturbance, and its position is always kept on the reference path. This validates that the proposed control scheme is capable of enhancing the robustness of the closed-loop system. The similar conclusions can be verified from the simulation results in case 2. Path-following control results comparison: path with straight line and circle. Path-following control results comparison: MSV with parameter perturbation. MSV: marine surface vessel.

Notice that the traditional NDSC method uses the weight vector
The computer burdens of the NDSC and CNDSC.
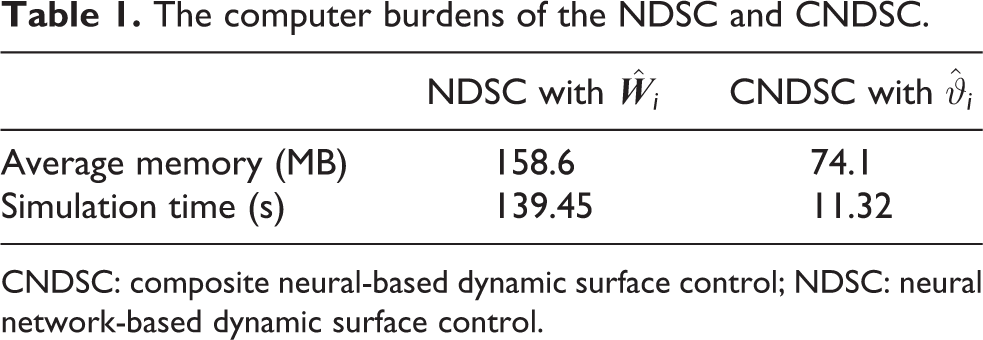
CNDSC: composite neural-based dynamic surface control; NDSC: neural network-based dynamic surface control.
Case 2. This case is to confirm the efficiency of the proposed control scheme for arbitrary curved path. To generate a reference path with a changeable curvature, the desired surge and yaw rate speeds are carefully selected as
The comparative simulation results and the closed-loop system signals are shown in Figures 5 to 10. Figure 5 shows the S-curve path path-following control results of the three controllers. It reveals that the proposed CNDSC scheme achieves the fastest response and least tracking errors. This conclusion is further confirmed from the position variations in Figure 6 and the position and heading track errors in Figure 7. Since the prediction errors in the CNDSC can provide an extra information for identifying the system uncertainties, the improved transient performance and better tracking accuracy are obtained in contrast to the NDSC method. It is noticed that the model-based BDSC approach also can follow the reference path. However, due to the fact that the unknown time-varying environmental disturbances cannot be efficiently compensated, it yields a larger position track error and a higher oscillation for the heading track error, as shown in Figure 7. In Figure 8, the state prediction values of the CNDSC approach are plotted, which can track the real states accurately. Figure 9 shows the CNDSC adaptation parameters which are convergent. In the end, Figure 10 gives the control inputs which are in reasonable ranges.

Path-following control results comparison: S-curve path.
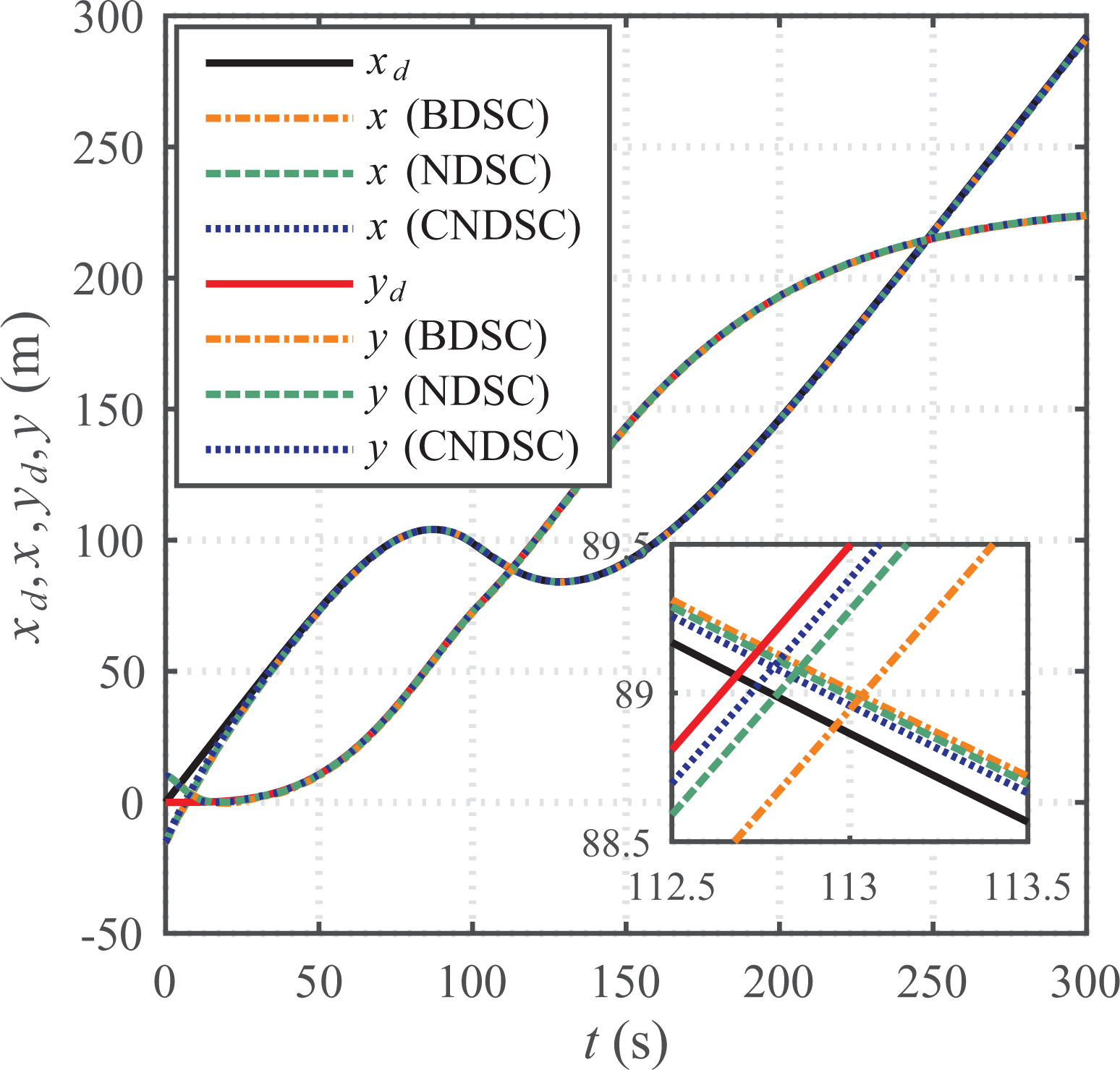
Positions comparison of the S-curve path path following.

Position and heading track errors comparison of the S-curve path path following.

State predictions of the proposed controller for the S-curve path path following.
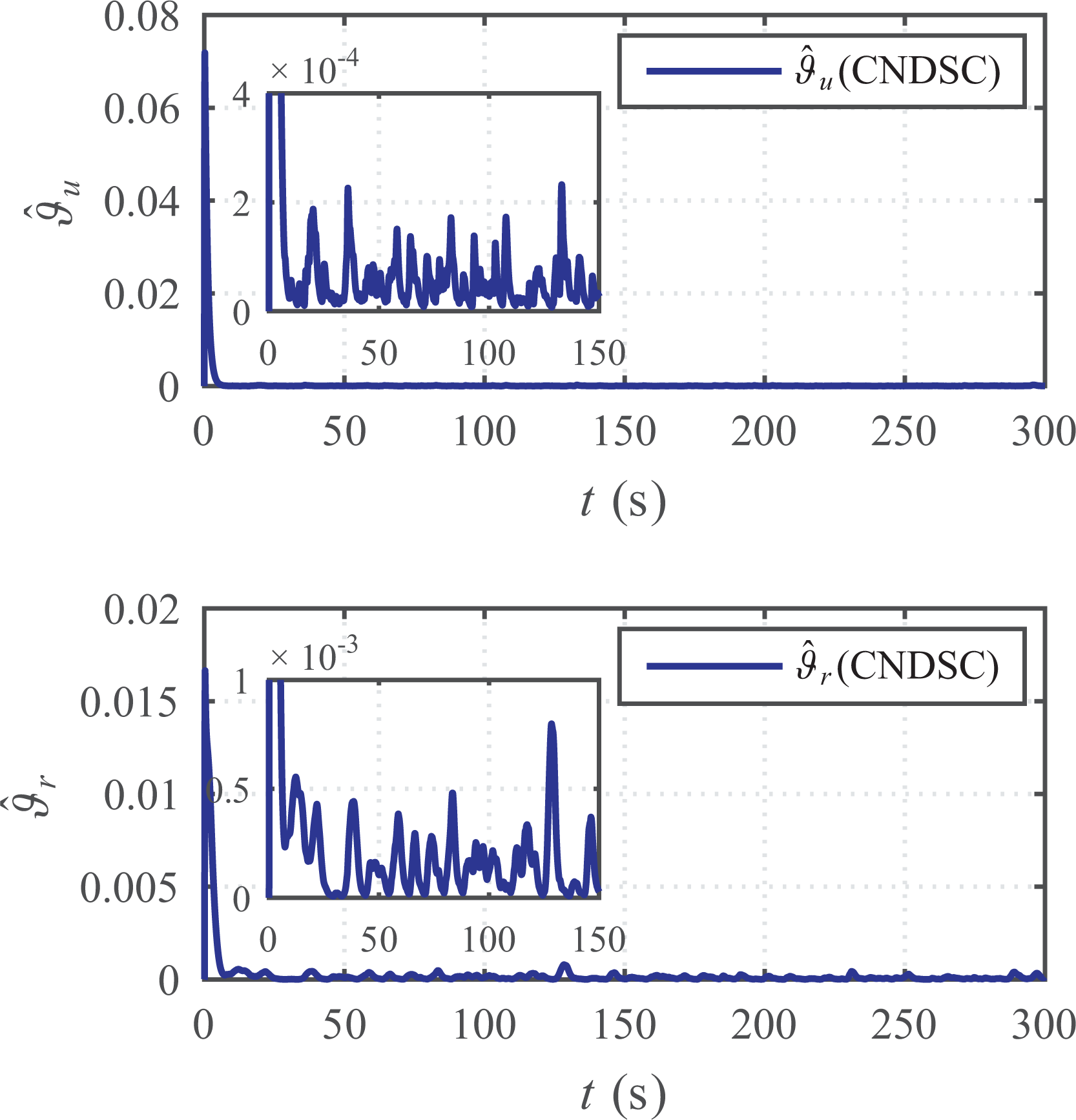
NN adaptive parameters of the proposed controller for the S-curve path path following. NN: neural network.

Control inputs of the proposed controller for the S-curve path path following.
Conclusions
In this article, the robust CNDSC scheme has been developed for the path following of MSVs with model uncertainties and time-varying external disturbances. The proposed new control method has the ability to eliminate the problem of explosion of complexity in the backstepping design and deal with the system uncertainties and unknown environmental disturbances. Moreover, by employing a predictor for each dynamical subsystem and incorporating the prediction error into the NN adaption law, better tracking accuracy and improved control performance for the path following have been achieved. In particular, the number of the NN adaptive adjusting parameter has been reduced to one, which makes the NN controller concise and easier to apply in practice. Stability analysis shows that all the closed-loop signals are guaranteed to be UUB. Finally, comparative simulation results have been given to illustrate the effectiveness of the proposed control approach. Future works include extending the capability of the CNDSC to handle the problems of input time delays and input saturations, and further performing verifications in practical applications.
Footnotes
Acknowledgements
The authors would thank the editors and reviewers for their significant comments and suggestions, which are extremely helpful for revising and improving the quality of our paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science and Technology Major Project of China (No. 2015ZX01041101), the National Natural Science Foundation of China (No. 51509057, 51509054, 51709214) and the Fundamental Research Funds for the Central Universities (HEUCF180102).