
Abstract
In the presence of unknown dynamics and input saturation, a finite-time predictor line-of-sight–based adaptive neural network scheme is presented for the path following of unmanned surface vessels. The proposed scheme merges with the guidance and the control subsystem of unmanned surface vessels together. A finite-time predictor–based line-of-sight guidance law is developed to ensure unmanned surface vessels effectively converging to and following the referenced path. Then, the path-following control laws are designed by combining neural network-based minimal learning parameter technique with backstepping method, where minimal learning parameter is applied to account for system nonparametric uncertainties. The key features of this scheme, first, the finite-time predictor errors are guaranteed; second, designed controllers are independent of the system model; and third, only required two parameters update online for each control law. The rigorous theory analysis verifies that all signals in the path-following guidance-control system are semi-globally uniformly ultimately bounded via Lyapunov stability theory. Simulation results illustrate the effectiveness and performance of the presented scheme.
Keywords
Introduction
In the past decades, unmanned surface vessels (USVs) attract ubiquitous attention in rescue, exploration, military, and commerce fields, and its path following problem has been widely investigated. 1 –5 High-accuracy path following control acts a pivotal role for an USV to successfully complete its task that reaches and stays a predefined parametric path automatically without time information. 6,7 Actually, path following means the output maneuvering problem that involves geometric and dynamic tasks of an USV’s closed-loop system, where the former task can be solved by a guidance law for steering and the latter task needs a kinetics controller such that it satisfies desired dynamic behaviors. 8,9
It is interesting that line-of-sight (LOS) guidance law is an effective algorithm that has been extensively studied from a couple of different perspectives, and various strategies have been developed to obtain higher tracking performance. 2,3,5 –7,9 –13 On the one hand, the traditional LOS guidance law has been modified by proposing a time-varying look-ahead distance combining with a so-called integral LOS (ILOS) to compensate for the drift force by adding the integral action. 10 From this point of view, Fossen et al. further extended the ILOS and proposed adaptive LOS (ALOS) that provided integral action by adding adaptive law for sideslip angle. 9 On the other hand, considering the disturbances induced by ocean currents that were expressed by virtue of relative velocities, the direct and indirect adaptive methods were used to deal with this condition. 11 In previous studies, 2,13 two guidance laws, extended state observer (ESO)-based LOS (ELOS) and predictor-based LOS (PLOS), were presented. They are different from the directly estimated sideslip angle, which are based on ESO and predictor-based position errors to estimate it indirectly. However, it should be noticed that all these achievements, by adding integral action to compensate for the sideslip angle, merely focus on the topic of kinematic level (geometric task), whereas the kinetic level (dynamic task or velocity requirement) have not been mentioned and assumed that along-tracking error is always zero. 8,9,11 And then these controllers simply chose the proportion–integral–derivative (PID) or the common sliding-mode based on Nomoto’s model.
Therefore, a solution to these aforementioned problems was proposed by Zheng and Sun, 12 which can be used in various parametric paths and still works when disturbed by the time-varying ocean currents. In fact, sideslip angle may be large in practical appliances, whereas the aforementioned references only satisfy the state of steady navigation of the USV with small sideslip angle. 2,9,10,13 Hence, it will lose stability in the presence of significant external disturbances. 14 In this context, Ning Wang et al. developed a finite-time sideslip observer to exactly estimate time-varying large sideslip angle in a short time. 7 Along this line of consideration, an extended result was presented by Miao et al. 5 and wherein a compound line-of-sight (CLOS) method was developed to handle the situation that sideslip angles are produced by relative sway velocity and ocean currents separately and can still work when the former relative sideslip angle is approximately more than 20°. All these aforementioned guidance laws cannot ensure the stability of the guidance signals in a finite time except the one proposed by Wang et al. 7 In the study by Jin, 15 a finite-time convergence of LOS was solved by time-varying tan-type barrier Lyapunov functions. In addition, from the prospective of designing a finite-time controller, a global finite-time stable controller was illustrated by PID sliding mode control (PID-SMC) algorithm presented by Yan et al. 16 Furthermore, finite-time observer-based tracking control was presented by Wang et al. 17 Unfortunately, this controller was for unmanned underwater vehicles. To achieve higher path-following performance, sliding mode, reinforcement learning, and object recognition approaches have been extensively studied. 3,18 –21
Regarding the problem of system nonparametric uncertainties, it is a common phenomenon in an industrial control environment. 22 Fortunately, universal function approximator was developed to estimate the unknown system dynamics caused by nonparametric uncertainties via nueral networks (NNs) or fuzzy systems, owing to their learning and adaptation abilities. 23 In this case, there are many research achievements, 12,22,24 –28 which show NNs sufficient performance on approximating nonlinear dynamics. In aforementioned statements, a common weakness of these NN-based control approaches is that the approximator depends on the number of the NN nodes. The online update parameters will grow significantly with increasing NN nodes. As for the question just mentioned, an alternative method is estimating the norm of the ideal weighting vector replacing the elements of the weighting vector. 29 –33 This idea also has been applied to fuzzy system in previous studies. 34,35 In this context, a deep-rooted information adaptive approach was presented by Song et al. 36 Moreover, an alternatively effective approach for uncertain system and unknown dynamics is an adaptive approximation-based regulation control combining with a single-hidden-layer feed-forward network proposed by Wang et al. 37 Due to the physical characters of actuator, however, these methods satisfied necessarily the input saturation constraint, which is the another limitation discussed in the following.
The input saturation constraint is induced by physical limitations, generally, almost every actuator is suffered from saturation and subjected to magnitude and rate constraints. 12,23 Moreover, saturation can influence the system performance severely, such as lag, overshoot, and instability. 12 The approaches to handle this problem were proposed in previous studies. 38 –43 An auxiliary design system was introduced to compensate for the input saturation of underactuated or full-actuated ships in previous studies 38 –40,42 and in Harmouche et al.’s study 43 for global tracking control was investigated. In addition, in the presence of input saturation, autonomous underwater vehicles and aircrafts also have been studied. 41,44
Motivated by the above observations and with an effort to address previous questions, the finite-time predictor line-of-sight–based adaptive neural network (FPANN) scheme is presented for path following of USVs in the presence of unknown dynamics and input saturation. The main contributions of this article are summarized as follows:
A novel finite-time predictor–based line-of-sight (FPLOS) guidance law is presented for the path following problem of USVs. Comparing with the PLOS guidance law proposed by Liu et al., 13 the finite-time convergence of the predictor errors are guaranteed by the proposed FPLOS with faster transient and stable performance.
In this article, all the parameters of the system are unknown. The effective controllers are developed by only approximate partly unknown dynamics including virtual control by minimal learning parameter, in the absence of coefficient for the unknown dynamics. These unknown coefficients are avoided by designing suitable Lyapunov function.
An auxiliary design system is introduced to compensate for the input saturation constraint. Moreover, the kinematic and kinetic levels are considered together with FPANN scheme using FPLOS guidance laws, MLP, and backstepping techniques.
The rest of this article is organized as follows. The second section states the problem formulation. Guidance-control system design is presented in the third section, devoting to design guidance-control algorithms of USVs. The stability analysis of the entire closed-loop system presented in the fourth section. The fifth section provides simulation results. The sixth section concludes this article.
Problem formulation
This section states USV’s model, assumptions, lemmas, radial basis function neural network (RBFNN), and control objective, which will be used in the controllers design and stability analysis later.
USVs’ model
The mathematical model of an USV on a horizontal plane, including its kinematics and dynamics, is described as follows 1,39


where
RBFNN
The RBFNN can approximate any continuous function

where the input vector

where

where aj is the gain coefficient,
Assumptions
Assumption 1
The vector
Assumption 2
The unknown sideslip angle β is bounded and slowly time-varying, satisfying
Assumption 3
The desired heading angle
Assumption 4
The optimal weight value is bounded, satisfying
Assumption 5
The control inputs

where
Remark 1
In Assumption 1, the measurable states are reasonable assumption.
22
Otherwise, observers are needed to estimate the unknown dynamics.
47
Assumption 2 is a reasonable assumption,
1,9
and the sideslip angle β is quite small,
10
satisfying
Lemmas
Lemma 1 49
For

where ε is a positive constant, and the constants
Lemma 2 50
Suppose


Lemma 3 12
The following switching function

Lemma 4 51,52
Consider system


where
Lemma 5 13,53
Let

where K is a continuous function. Then, all solutions of
Control objective
Design control laws τ and the update law
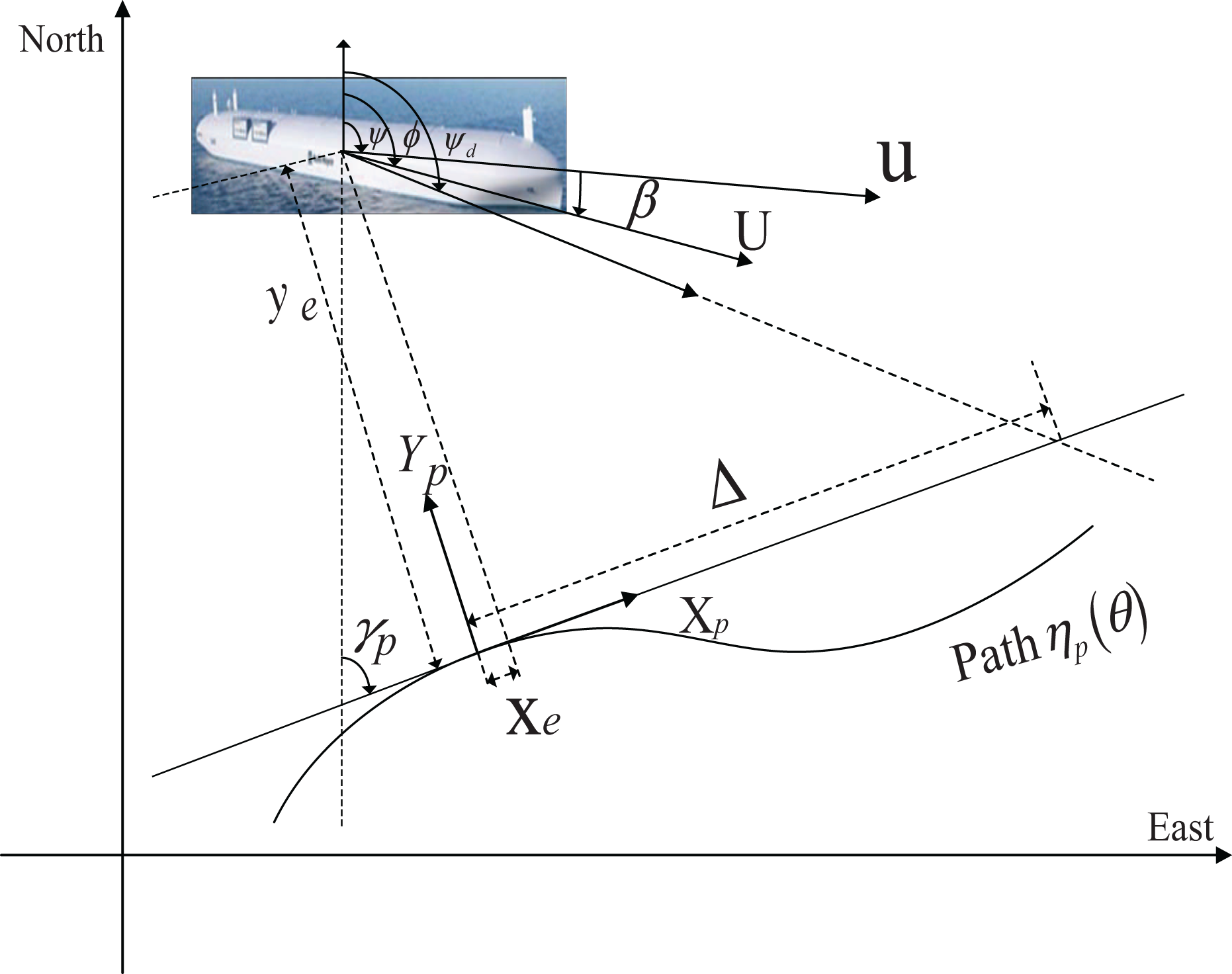
Geometrical illustration of path-following control.
Guidance-control system design
In this section, as shown in Figure 2, one develops FPLOS guidance law and control algorithms, where latter is designed by combining with MLP and backstepping techniques.

Control schematic of USVs. USV: unmanned surface vessel.
FPLOS guidance
In this subsection, the FPLOS guidance scheme is designed to compensate for sideslip angle. Since drift force significantly affects USVs tracking performance and even deteriorates it, if the sideslip angle produced by drift force is not properly compensated. 1–3,5,7,9,10,12,13
Path following error dynamics
The path-normal line from the point

where

where
Estimation sideslip angle
To estimate the unknown sideslip angle β, according to equation (15), one proposes two predictors as follows

where

where
Consequently, by combining with equations (15) to (17) and Assumption 3, results can be obtained as follows

Remark 2
The error system in equation (18) is significantly different from the error system provided by Liu Lu et al.
13
First of all, one introduces the fractional power terms
Theorem 1
Considering that the presented update law
Proof
Choosing the following Lyapunov function candidate (LFC)
where
Using Lemma 1, we have

Hence, according to Lemma 3, the predictor errors
The FPLOS guidance law
The augmented FPLOS guidance heading is designed as follows

where

where

Theorem 2
Applying the FPLOS guidance laws (21) to (23) to the path-following kinematic subsystem (equation (15)), and one can obtain along- and cross-tracking errors system equation (16) which is UAS.
Proof
Substituting the FPLOS guidance laws (21) to (23) into the path-following errors system equation (16), we obtain

Employing LFC

where
Using the fact that it derived from Young’s inequality as follows

Substituting equation (26) into (25) yields
where
Control design
In this subsection, designing the control laws

where ud is the desired surge velocity and
The time-derivative of errors ue and re along equations (2) and (28) results can be obtained as follows

The above equations can be simplified as follows

By introducing the MLP to approximate the lumpily unknown dynamic in system equation (30), we have

where
Considering input saturation, the corresponding nominal control laws are designed as follows

where
For the facility of constraint effect analysis of the input saturation, the auxiliary system is given by

where
The update laws of MLP RBFNN are designed as follows

where
Remark 3
In fact, the USV in question is no actuation in the sway dynamic. The sway velocity, however, is bounded, and the conclusion will be proven later. Hence, the approximation of sway dynamic is omitted. The readers are interested in the approximation of sway dynamic; see Zheng et al. and Wang et al.’s studies. 6,7
Stability analysis
Theorem 3
Consider the USV is described by equation (2), satisfying Assumptions 1 to 5, the guidance laws (21) to (23), the control laws (32) with adaptive laws (34), and auxiliary system equation (33) are applied to it. Then initial conditions are bounded and satisfy
Proof
Consider the following complete LFC

According to Lemma 1, it is worth noticing that the following inequalities hold








Substituting equations (36) to (43) into equation (35) yields
For
where
Otherwise, for


we have

where
Combining with equations (45) and (48), the results can be obtained as follows

where
Thus,

According to a standard Lyapunov theory extension,
54
the bounded error signals were proved, the tracking errors
The sway dynamic
From the equation (2), the sway dynamic as
In this note, the external disturbances are out of the scope of this research, assuming USVs in the absence of disturbance, that is,

By employing Bellman–Gronwall comparison principle, 55 the results can be obtained as follows
It can be seen from the above inequality (equation (53)) that the sway dynamics v is being bounded by combining with the fact that r, u, and
Remark 4
In practices, the rudder speed is limited by the physical characters of actuator. Furthermore, the study by Van Amerongen
56
has pointed out that common values of rudder speed are
Remark 5
The closed-loop system only satisfies SGUUB since the RBFNN is introduced in equation (31) can not keep well approximated capability out of the suitable compact set
Remark 6
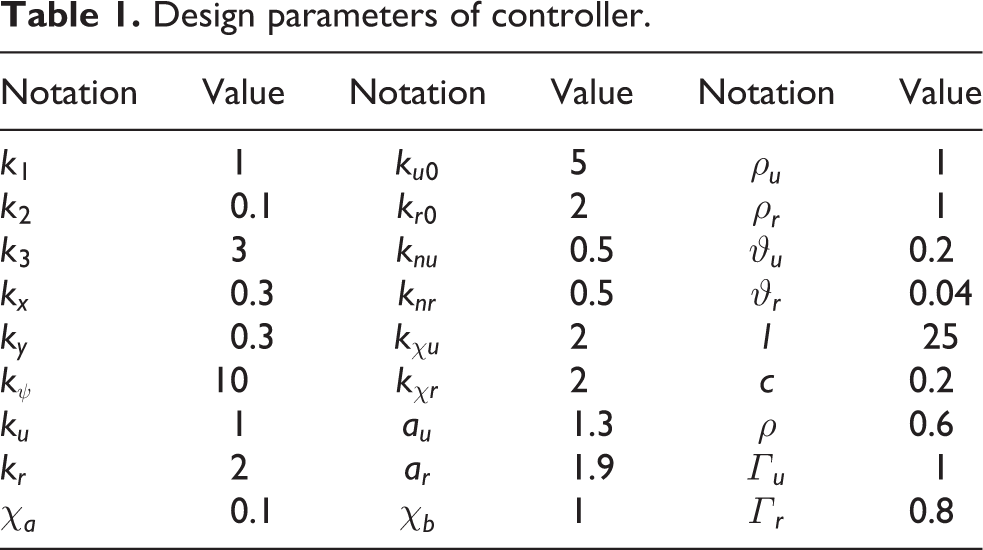
The optimal design parameters can be found by gradually decreasing or increasing and testing the simulation runs simultaneously. Furthermore, in this article, the closed-loop controller is divided into two parts between FPLOS-based backstepping controller with auxiliary system and FPLOS-based MLP controller. After adjusting design parameters until they can be taken effect, separately, these two controllers are consolidated together into the presented FPANN controller. And then the optimal parameters are found by changing design parameters slightly.
Numerical simulation
To illustrate the effectiveness and performance of the presented FPANN scheme, we conduct simulation studies with an USV whose dynamic is given by equations (1) and (2) and its parameters can be found in the work by Lefeber et al.
58
The maximum magnitude of surge force is approximately

Design parameters of controller.
The desired path is given by

Case 1
In this simulation, to prove the effectiveness of the proposed FPLOS guidance laws, a comparison analysis is conducted between the FPANN scheme and the PLOS-based adaptive neural network (PANN) scheme in the same design parameters. The comparative results are plotted in Figures 3
to 10 demonstrate that the FPANN provides improved and fast performance. It can be observed that the estimation errors

The path following performance.

The estimation errors of
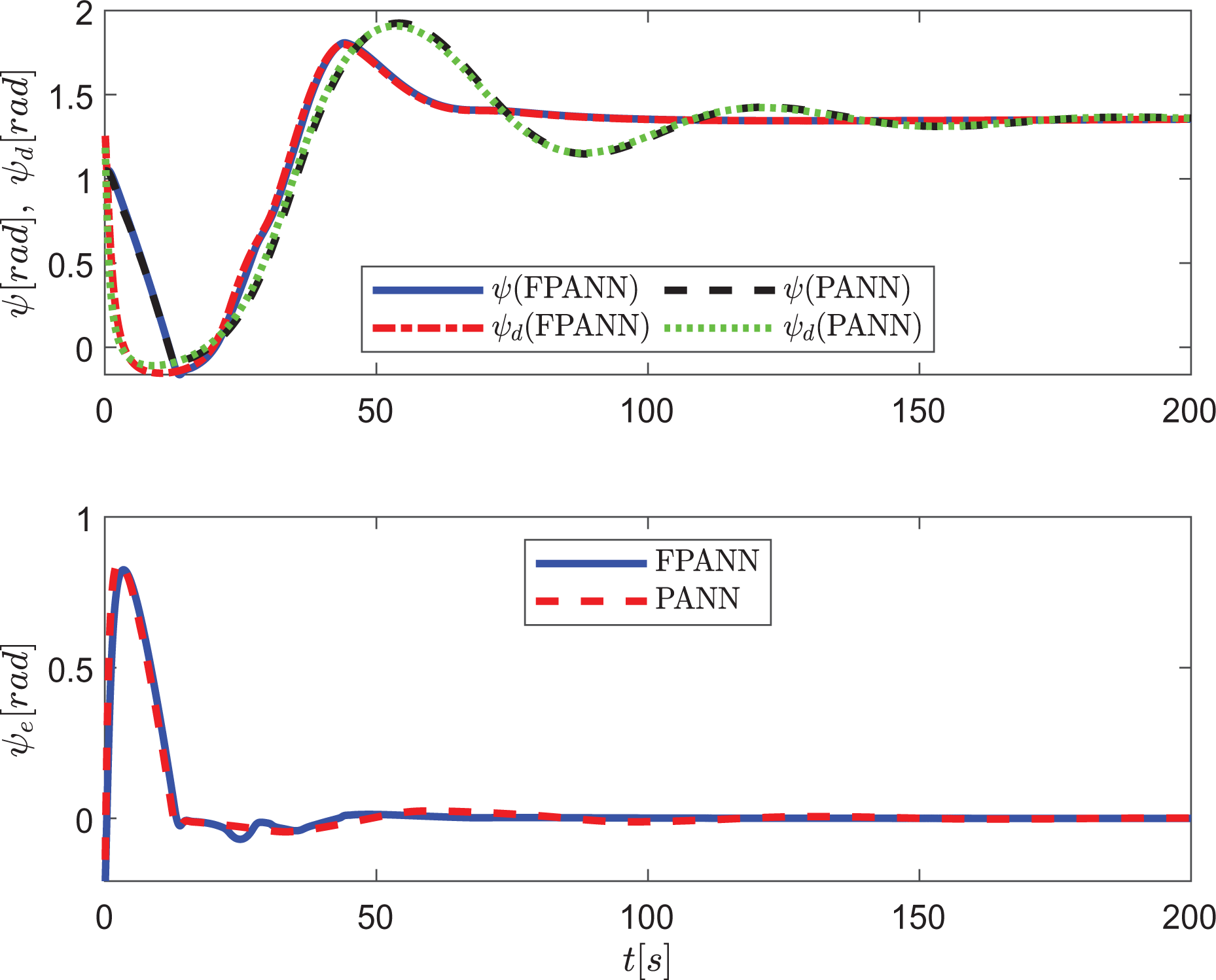
The heading angle ψ, guidance law

The update law of the path variable θ.
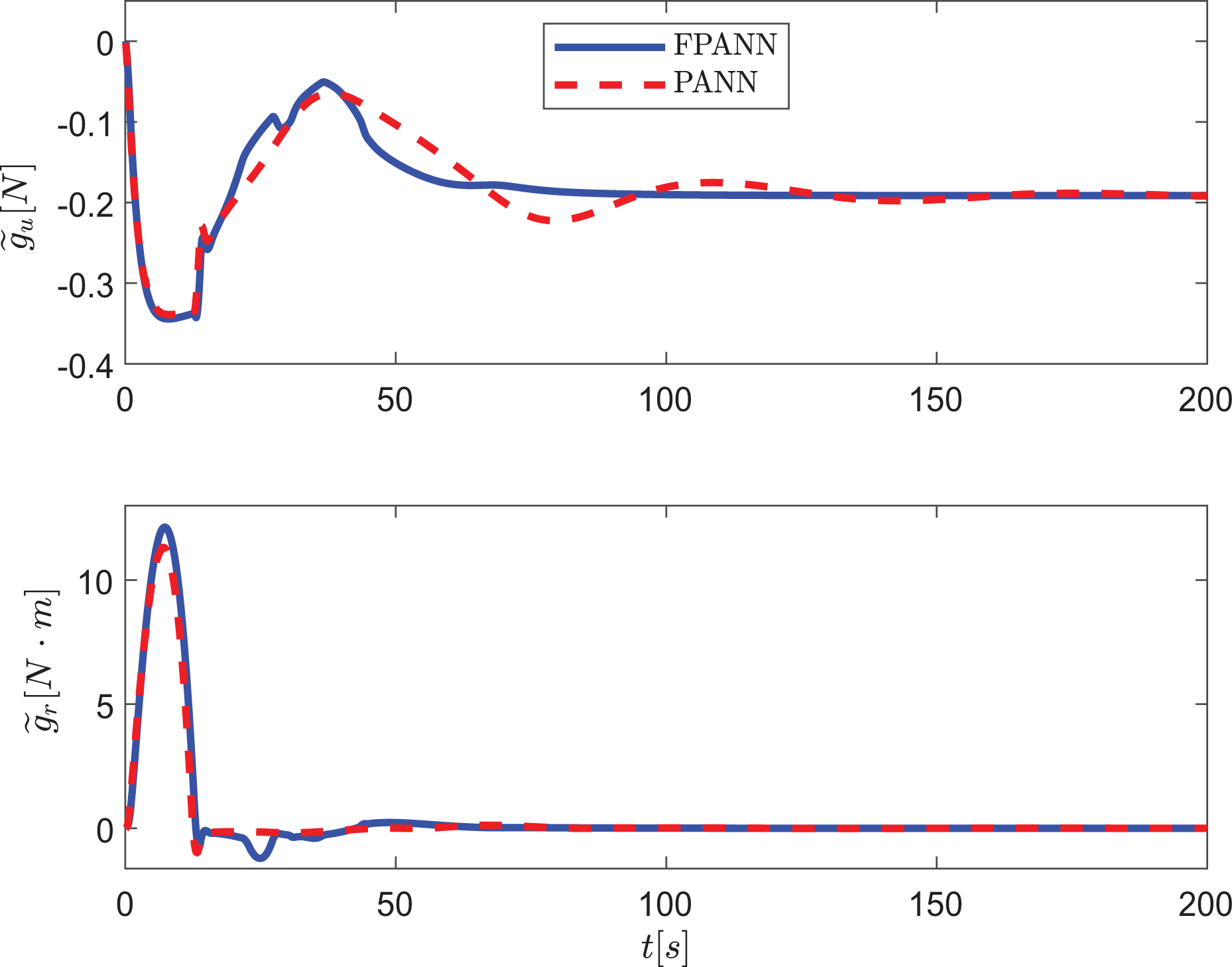
The approximation errors of unknown dynamics gu and gr.
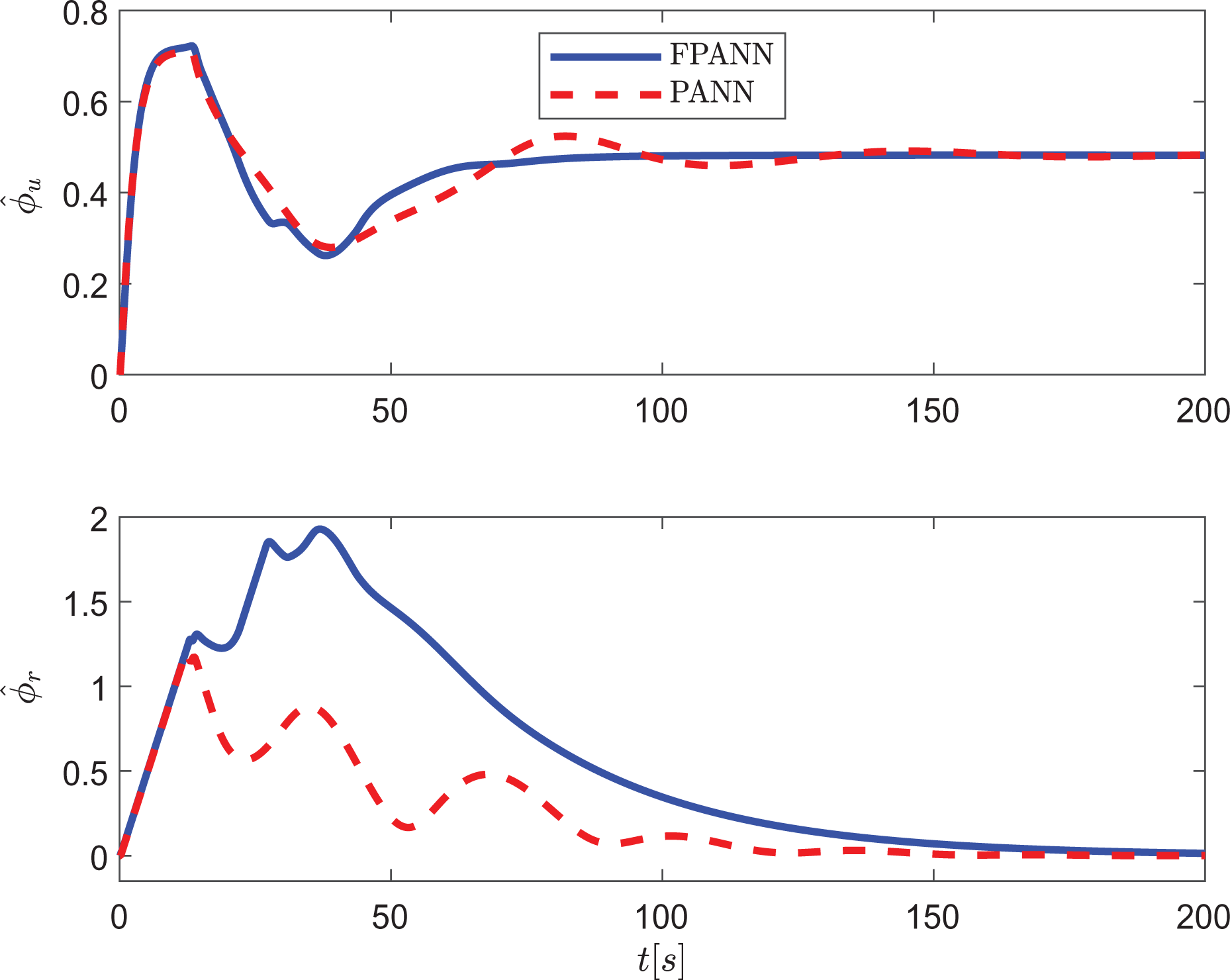
The norms of

The auxiliary system states
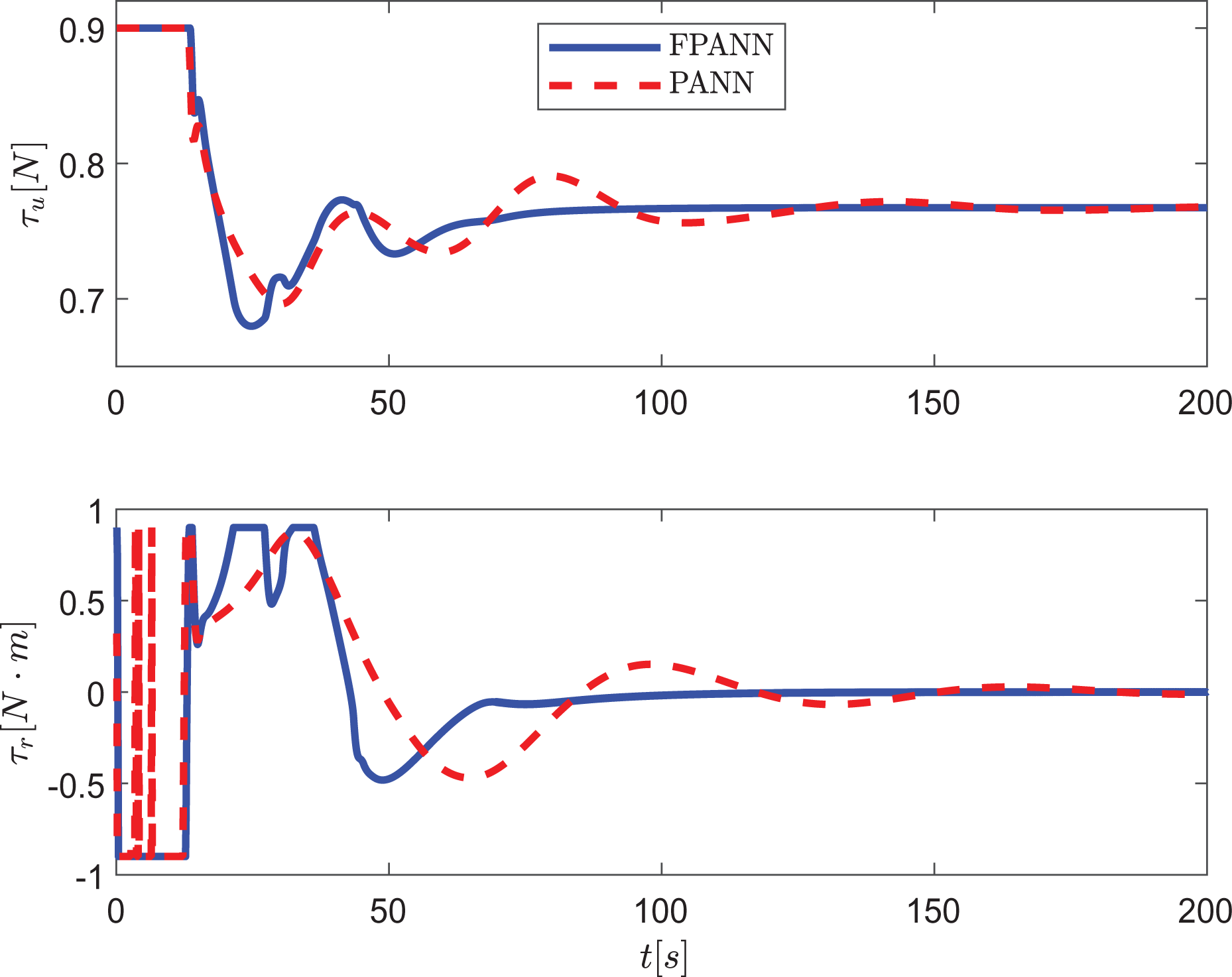
The control laws
Case 2
Similar to the comparison of case 1, another comparison analysis is executed to verify the effective anti-windup performance of the presented FPANN scheme. The controller considering input saturation constraint is marked as With Sat, and the controller without considering input saturation constraint is marked as Without Sat. The results are shown in Figures 11 to 18 that illustrate the presented scheme works effectively and satisfy required conditions of input saturation while the real control inputs beyond the constraint conditions without anti-windup strategies. Figure 11 describes almost the same precise path-following performance even in the presence of input saturation. The error sideslip angle has a small range oscillatory behavior which is shown in Figure 12 with both conditions. The heading angle error converges to an arbitrarily small neighborhood of zero within a short time can be seen from Figure 13. And then, Figure 14 shows the velocity trending

The path following performance.

The estimation errors of

The heading angle ψ, guidance law

The update law of the path variable θ.

The approximation errors of unknown dynamics gu and gr.

The norms of

The system states

The control laws
Conclusion
This article develops a novel FPANN scheme for path following of USVs with unknown dynamics and input saturation. The presented FPLOS guidance laws, control laws, and auxiliary system in this scheme ensure USVs effective converging to and following the predefined path. It is shown via Lyapunov stability theory that the closed-loop system is SGUUB. Simulation results demonstrate the effectiveness and performance of the presented FPANN scheme. In addition, there are many open problems for future investigation, such as external disturbances, dead-zone input nonlinearity, state constraint (e.g. yaw rate), and fault tolerant, which will be the focus of our further study.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant 51879027, 51579024, 6137114, and 51809028 and in partly by the Fundamental Research Funds for the Central Universities under grant 3132016311 and 3132018154.