
Abstract
The motion rehabilitation training robot is developed to help patients with motion dysfunction recover their motor function by providing a large amount of repetitive robot-aided exercise. To achieve stable and smooth robot-aided exercises for stroke patients, a motion control method with a novel dynamic motion planning strategy is proposed. The physical state of the training limb is assessed real time during the rehabilitation exercises. The dynamic motion planning strategy is developed by employing a suitable interpolation method dynamically corresponding to the physical state of the training limb to plan a trajectory tracking system that completely utilizes different interpolation characteristics to manage the movement in accordance with the time-varying physical state of the training limb. Concurrently, a position-based impedance control is adopted to achieve compliant movement. Functional (quantitative and qualitative) and clinical experiments are conducted on a four-degree-of-freedom whole-arm manipulator upper limb rehabilitation robot to verify the effectiveness of the control method designed with the dynamic motion planning strategy. The results indicate that the proposed control strategy can exhibit better performances in terms of the stability and smoothness.
Introduction
Stroke is a disease, the main clinical symptoms of which are either ischemic or hemorrhagic injuries to the brain, mainly divided into hemorrhagic stroke (cerebral hemorrhage or subarachnoid hemorrhage) and ischemic stroke (cerebral infarction, cerebral thrombosis), resulting in a very high disability and mortality. 1,2 According to the World Health Organization, more than 15 million people suffer a stroke annually, and over 69% of the stroke patients experience upper extremity motor dysfunction. 3 However, intensive rehabilitation motion training based on the restoration theories of muscles and neuroscience assists in improving the function recovery and self-care ability of a patient in his/her daily life after the stroke. 4,5
Rehabilitation training robots have been developed with novel technologies to assist patients in function recovery. Currently, there is an increasing interest to develop and apply robotic systems because robot-aided rehabilitation has demonstrated various advantages such as high precision, controllability, and high efficiency. 6,7 To enhance the effectiveness of a therapy, different types of control strategies have been developed for supplying visual feedback, enriching the sensorial motor experience, and stimulating the enthusiasm for the training. 8 –10 Investigation of neurological recovery strongly suggests that movement smoothness is a result of the learned coordination, and generally the smoothness increases during stroke recovery. 11 The smoothness is an important characteristic of a coordinated motion function that is primarily related to the central nervous system (CNS), and so, numerous stroke patients have a low movement smoothness. 12 In a clinic, robot-aided passive rehabilitation movement is usually adopted because the stroke patients are extremely impaired to actively control the robot against gravity in the early rehabilitation stage. 13 Various investigations have verified the efficacy of passive mobilization. 13 –16 In terms of robot-aided passive rehabilitation training, the existing control strategies rarely focus on the smoothness of the rehabilitation exercises. However, in view of the individuality of a subject, achieving a stable and smooth movement is not easy to activate the muscle reflexive mechanism. A study by Buma et al. 17 verified that the smoothness is related to brain activation, and therefore, robotic-assisted smooth movements could enhance neuroplasticity that is at the base of motor recovering.
Motion planning is usually employed to plan the trajectory tracking, and the stability and smoothness of the tracking movement is primarily determined by the interpolation method. 18 Many interpolation methods have been employed or developed for industry application. To improve the tracking performance, a parametric interpolation method in the spatial geometry was proposed by Adel et al. 19 The Lagrange interpolation method 20 and trigonometric splines interpolation scheme 21 were adopted to formulate the trajectory planning for the optimization of the energy consumption, for example. Varied interpolation strategies have been investigated and applied to the application robots for achieving better movement performances such as linear interpolation based on the methodology in the literature 22 and torque-efficient motions, 23 B-spline interpolation, 24 and Hermite cubic interpolation. 25 However, in general, only one interpolation method was employed to plan the trajectory tracking. Till date, only a few robot systems have adopted a motion planning strategy that dynamically uses the advantages of different interpolation methods to plan the trajectory tracking taking into account the external mutative conditions. Meanwhile, in terms of the robot-assisted rehabilitation training, few scholars have focused on the influence of interpolation method on the control performance.
The objective of all designed application robots is to operate while delivering good performances. A rehabilitation training robot that is employed for providing stable and smooth robot-aided passive exercises offers numerous advantages such as avoiding injuring the affected limb, reducing muscle tension, and motivating the psychological cooperation of the patient. Usually, to achieve an effective rehabilitation effect, different training types and control methods are employed according to the rehabilitation stage of the patient. In our previous research, a hierarchical safety supervisory control 26 and prescription-diagnosis function 27 were developed for safety and adaptivity issues. This investigation mainly focuses on achieving a smooth and stable training movement for robot-aided passive rehabilitation.
Thus, in this study, a motion control method for robot-aided passive exercises is designed using a novel dynamic motion planning strategy. The proposed strategy effectively uses different interpolation methods based on the physical state of the training limb (PSTL) and then improves the movement performances (stability and smoothness). Because each interpolation method has its own characteristics, during the robot-aided rehabilitation movement, the interpolation method is dynamically employed according to the external situation, which can make full use of the advantages of each interpolation method and be helpful to improve the motion performances. To provide a stable and smooth robot-aided training, the designed control system first assesses the PSTL online, then employs a suitable interpolation method to plan the trajectory tracking by a dynamic motion planning strategy, and finally, a position-based impedance control (PBIC) is adopted to perform the compliant rehabilitation exercises.
WAM upper limb rehabilitation system setup
The upper limb rehabilitation system is constructed with the whole-arm manipulator (WAM). In general, a rehabilitation system mainly includes three parts, namely designed software, hardware driver, and actuating mechanism. As shown in Figure 1, in this research, a high-level personal computer (PC) communicates with a low-level hardware section, and all the control commands that are well managed by the developed control strategy are sent to the “puck servo-controller.” Finally, the actuating mechanisms are driven to offer the designed training exercises to the patient. The system architecture and schematic of actuating mechanisms are expressed in Figure 1(a) and (b), respectively.

(a) System architecture and (b) schematic of actuating mechanisms.
As shown in Figure 2, the constructed WAM upper limb rehabilitation system mainly includes four parts, namely the Barrett WAM, an external PC, a self-developed three-dimensional (3-D) force sensor, and an arm support device. 26 The WAM was developed with cable-and-cylinder transmissions technology that has various advantages such as zero backlash, low inertia, low friction, and backdrivability. Concurrently, the WAM can be controlled by a joint torque control that conduces to decrease its kinematic redundancy. 28 In our constructed WAM rehabilitation system, the WAM has four revolute joints, working in a wide workspace. During the running, the system working states (such as the motion velocity, joint torque, and voltage condition) are presented on two control panels. In addition, the motor angle of each revolute joint is detected in real time, and each revolute joint can be driven by setting the control torque according to the developed control method. All the motion parameters and control commands are exchanged between the high-level PC and low-level motor puck 28 with a high-speed controller area network bus. In our previous work, to detect the interface force between the end-effector and impaired limb being trained during the rehabilitation training, a 3-D force sensor was developed 29 via a serial port to communicate with the external high-level PC. The developed force sensor was installed on the end of the manipulator (Figure 2). In this constructed rehabilitation system, an arm support device is designed to support the impaired limb for the passive rehabilitation training that can serve the left or right forearm by modifying the installment position.

WAM rehabilitation system setup. WAM: whole-arm manipulator.
In this study, the complete rehabilitation system software is developed with Ubuntu Linux 10.04 system on an external high-level PC. To improve the real-time ability, the real-time Xenomai is adopted, and all the system tasks are managed using a multi-thread method. Moreover, all the threads are categorized into real-time and non-real-time threads according to their functions.
Assessment of the dynamic PSTL
In the clinical rehabilitation exercises, the PSTL is dynamic, and there are various internal or external factors affecting it such as coughing, sneezing, pose-position change, abrupt twitching, or uncertain external disturbances. 30,31 In terms of the security and control effectiveness, it is extremely necessary to monitor and evaluate the PSTL online when providing the robot-aided rehabilitation exercises.
Features
As described above, numerous existing factors cause a PSTL to vary dynamically during the robot-aided rehabilitation program, such that their impact on the PSTL reflects in the working performances of the robot. 30 This implies that the tracking performances (in terms of the position and velocity) are affected by the physical condition of the impaired limb being training. Therefore, tracking features are selected to assess the PSTL.
In this research, the mean square error (MSE) in comparison with other feature extraction methods is adopted to represent the tracking features. Thus, the MSE value is a measure of the signal power. The MSE indicates a good practicability and effectiveness performance in a real-time control; therefore, it is extensively used in most applications. 32 In this study, subsection sliding MSE (SMSE) is adopted to obtain the features for an effective and instantaneous practical application that is expressed as

where
For the first l sample data, the corresponding feature in real time is acquired using the equation given below

Dynamic physical state evaluation
Fuzzy theory is a tool and method of reasoning and computing. It has been widely adopted in various applications for its human-like reasoning and decision-making.
33
Thus, based on the practical application, a fuzzy logic reasoning method is adopted to assess the dynamic PSTL. The position and velocity tracking characteristics are considered as the inputs, and each input includes the extracted features with the SMSE method and the entire tracking variation. Double inputs

where
In this investigation, the inputs and output are categorized into five fuzzy subsets. The middle three subsets are mapped with a triangle-shaped membership function, whereas the first and last subsets are mapped with trapezoidal membership functions. The corresponding output, denoted as ρ, reflects the dynamic PSTL. The overall surface map of the assessment of the PSTL according to the designed inference rules is shown in Figure 3.

Input–output relationship surface map.
Control strategy based on dynamic motion planning
Interpolation
For a joint coordinate system, a certain interpolation method is usually applied to obtain the processing position for the starting and target positions for the trajectory tracking, this is called trajectory interpolation. Researchers have developed and introduced varied interpolation methods to achieve a smooth and stable tracking movement depending on the operative speed and precision of the kinematic or dynamic model. 22 Usually, each interpolation method has a different effect on the tracking motion according to its own characteristics.
The linear segments with parabolic blends (LSPB) method, owing to its good performance and easy implementation, has become one of the widely adopted interpolation methods for tracking motion. The LSPB method is illustrated in Figure 4, where the defined trajectory is divided into specific segments based on the waypoints. Linear segments and parabolic blending are adopted to generate the defined trajectory. 34 The LSPB trajectory possesses the characteristic of a constant motion velocity at the line segment that is “ramped up” or “ramped down” to its desired value at the parabolic blending waypoint. More detailed information about the specific application of the LSPB method can be found in the literature. 34

Trajectory, velocity, and acceleration with the LSPB method: (a) interpolation trajectory planning and (b) joint velocity and acceleration. LSPB: linear segments with parabolic blends.
Line interpolation (LI) is the basis of various numerical methods.
22
Between the start and end points, a simple linear function is used to calculate the interval points. In interval

Being a line approximation, this method is based upon easily understandable concepts, and complex calculations are not required to obtain the interval points. Thus, it quickly moves with the desired velocity. However, it does not work perfectly in the adjacent part of the predefined waypoints.
To follow the desired trajectory more quickly, a pulse linear interpolation (PLI) is developed in this research. Here, we provide a brief necessary introduction about the PLI. It is a method that combines a “pulse variance” with LI. Thus, the PLI is expressed as follows

where
In this study, the passive motion training trajectory is predefined with 20 points per second (50 ms each point), and between the predefined adjacent points, 24 points will be interpolated during the tracking control. A dynamic motion planning strategy is proposed to improve the movement performances of the robot-aided passive rehabilitation exercises. This strategy dynamically employs different interpolation methods to guide the motion tracking to match the mutative PSTL by effectively combining the individual characteristics of each interpolation method. The LSPB, LI, and PLI methods are adopted in this research. LSPB is employed as the fundamental method to follow the desired trajectory. When a PSTL is ideal (without disturbance), the robot end-effector smoothly stretches the impaired limb with the LSPB interpolation. However, owing to a slight forearm quiver, pose-position change, and sudden external disturbance, the ideal balance is usually disturbed. Under these conditions, still-do-as-before is difficult to achieve a smooth movement, and the interpolation should be swift rather than mild. To improve the movement performance, LI is employed under a weak disturbance, whereas PLI is employed under a strong disturbance. Thus, the suggested dynamic motion planning strategy based on the PSTL is promising to well manage the training movement by taking advantage of each method.
Control method
For one degree-of-freedom case of the rehabilitation robot, the dynamics model of the rehabilitation robot can be expressed as follows 35

where
In a clinic, during the early rehabilitation phase, a stroke patient usually does not have any motor ability and sense of motion. Concurrently, the brain function of stroke survivors is partly impaired, and their CNS is not as stable as that of a healthy subject. Therefore, interactive compliance is one of the key issues in the system design of rehabilitation robots. Impedance control 36 is a model-based approach that establishes an effective framework to manage this task. Impedance control was first advanced and developed by Hogan in 1984, and then various forms of impedance control were developed to extend this method. Until now, numerous investigators have made significant contributions to this widely practical application and the stability analysis of PBIC. 37,38 In our previous research, the PBIC method is employed to achieve stretching movement for passive rehabilitation training, and the stability analysis of our constructed rehabilitation system was presented in the literature. 35 In this study, we examine the control performances of the robot-aided passive movement exercises. For this purpose, PBIC is employed to drive the WAM providing the passive rehabilitation exercises.
According to the impedance control theory, the relationship between the position and force can be established by the mass–damper–spring model. 39 –41 It can be described as follows

where
In this investigation, the PBIC is adopted to conduct passive tracking movement. The desired parameters (position, velocity, and acceleration) are adjusted by the disturbing force according to the impedance control model. The disturbing force is measured by 3-D force sensor which is installed on the end of the manipulator.
The designed PBIC includes two parts, namely a proportional–integral–derivation (PID) controller and an impedance controller. As mentioned above, the impedance controller works for implementing an interactive compliance. The PID position controller is adopted to achieve the trajectory tracking. Combining the gravity compensation, the control torque for a joint is expressed as the follows

where
A dynamic motion planning strategy is suggested to achieve a smoother and more stable training movement in this investigation. The designed control system that combines the dynamic motion planning strategy with PBIC is presented in Figure 5. It mainly consists of impaired limb state assessment, dynamic motion planning mechanism, impedance controller, PID controller, and gravity compensation sections. The impaired limb state assessment section observes online the PSTL with the extracted movement characteristics of the position and velocity. According to the assessed PSTL, a suitable interpolation method is selected to program the desired trajectory by the dynamic motion planning mechanism. Then, the impedance controller combined with the PID controller drives the manipulator to provide passive rehabilitation movement. Due to the designed control system considering the change of external situation and dynamically employing suitable interpolation method to manage the tracking movement, it can take advantage of each interpolation method and be helpful to improve the motion performance.

Block diagram of the control system based on the dynamic motion planning strategy.
Experiments and discussion
In this investigation, a novel dynamic motion planning strategy based on the PSTL is proposed to improve the robot-aided movement performances. To examine the effectiveness of this strategy, functional and clinical experiments are carried out to demonstrate and analyze the control performances, respectively. The functional experiments include quantitative and qualitative experiments, which are performed by healthy adult. As mentioned in the “Interpolation” section, the proposed dynamic motion planning strategy adopts the conventional LSPB as the primary interpolation method to follow the desired trajectory, and other appropriate methods (LI and PLI) are incorporated by the dynamic motion planning mechanism according to the PSTL. We mainly investigated whether the suggested dynamic strategy effectively improves the robot-aided exercise performances under disturbances compared with a single routine LSPB.
Quantitative experiments
Methods
In the quantitative experiments, a 10-N disturbance for 1 s was exerted on the robot end-effector in the opposite direction of the movement during the rehabilitation exercises.
Two types of training-movement trajectories were predefined according to the clinical application, namely, the shoulder extension/flexion exercise in the horizontal plane and the elbow extension/flexion exercise in the vertical plane. Each designed movement was single joint motion. The training movements in the horizontal and vertical planes were driven by J3 and J4, respectively (see Figure 6), and the predefined sinusoidal trajectories were same as in the literature.
26
The horizontal exercise trajectory was defined as 0.45 rad in flexion and −0.45 rad in extension (XOY plane), 362 points, with 18.1 s for each session, and the vertical exercise trajectory was expressed with −5.3 rad in flexion and −3.8 rad in extension (YOZ plane), 286 points, with 14.3 s for each session. The main parameters of the experimental system were set as follows: parameter

Training movements in the horizontal and vertical planes—functional experiment.
Results
The horizontal and vertical exercises are performed with respect to the third joint (J3) and fourth joint (J4) of the WAM, respectively. During the experiments, the corresponding joint control torque and position error were recorded to analyze the smoothness and tracking performances. The horizontal and vertical experimental results are shown in Figures 7 and 8, respectively. In this investigation, since the cubic spline interpolation (CSI) method is one of the common methods used in the industry, the results of CSI and the other two methods (LI and PLI) are also illustrated to better demonstrate the characteristics of each method. During the experiments, it was very difficult to ensure that the disturbances are exerted exactly at the same position; however, this did not affect the analysis of the performances at all. Comparing the performances in Figures 7 and 8, PLI achieves the best tracking (see Figure 7((a), graph b) and Figure 8((a), graph b), whereas with the easy-to-volatility control torque (see Figures 7((b), graph b) and 8((b), graph b), the stability of the exercise is not very satisfying. Comparing Figures 7 and 8, the CSI and LSPB present almost the same control performance in tracking and torque control. The proposed dynamic motion planning strategy shows better performances not only for position tracking (in Figure 7 ((a)) and Figure 8((a))) but also for stable movement (in Figure 7((b)) and Figure 8((b))) than the LSPB method.

Movement performances with the 10-N and 1-s disturbance in the horizontal exercise—(a) LI, (b) PLI, (c) LSPB, (d) dynamic motion planning, and (e) CSI: (a) tracking error and (b) control torque. LI: line interpolation; PLI: pulse linear interpolation; LSPB: linear segments with parabolic blends; CSI: cubic spline interpolation

Movement performances with the 10-N and 1-s disturbance in the vertical exercises—(a) LI, (b) PLI, (c) LSPB, (d) dynamic motion planning, and (e) CSI: (a) tracking error and (b) control torque. LI: line interpolation; PLI: pulse linear interpolation; LSPB: linear segments with parabolic blends; CSI: cubic spline interpolation.
The data segments including the 1-s and 10-N disturbance were selected to further analyze the control performances. Specifically, the 19–22 s segment was used for the horizontal experiment, and the 8–10 s segment for the vertical experiment. Four indices were selected to assess the control performances, namely the maximum absolute error (MAE), sum of the absolute error (SAE) for tracking, and maximum absolute torque (MAT), and maximum absolute rate of torque (MART) during 0.1 s for the smoothness and stability. The results of the horizontal and vertical quantitative experiments are presented in Tables 1 and 2. In the horizontal and vertical experiments, comparison of the four indices reveals that PLI works with the worst stability in the torque control (MAT = 13.094 N·m, 0.1-s MART = 89.476 N·m/s in the horizontal direction, and MAT = 32.81 N·m, 0.1-s MART = 209.17 N·m/s in vertical), and it implies that PLI is different to serve stable and smooth exercises. According to analysis results, the CSI and LSPB demonstrate little difference in control performance. LSPB presents slightly better movement performances than CSI in vertical experiments, while slightly inferior in horizontal experiments, which may be due to the influence of gravity field. The analyzed outcomes with the four indices demonstrate that the dynamic strategy operates, exhibiting better performances of tracking and smoothness than the LSPB under the quantitative disturbance, irrespective of the horizontal or vertical exercises.
Performance comparison with the 10-N and 1-s disturbance in the horizontal exercise.
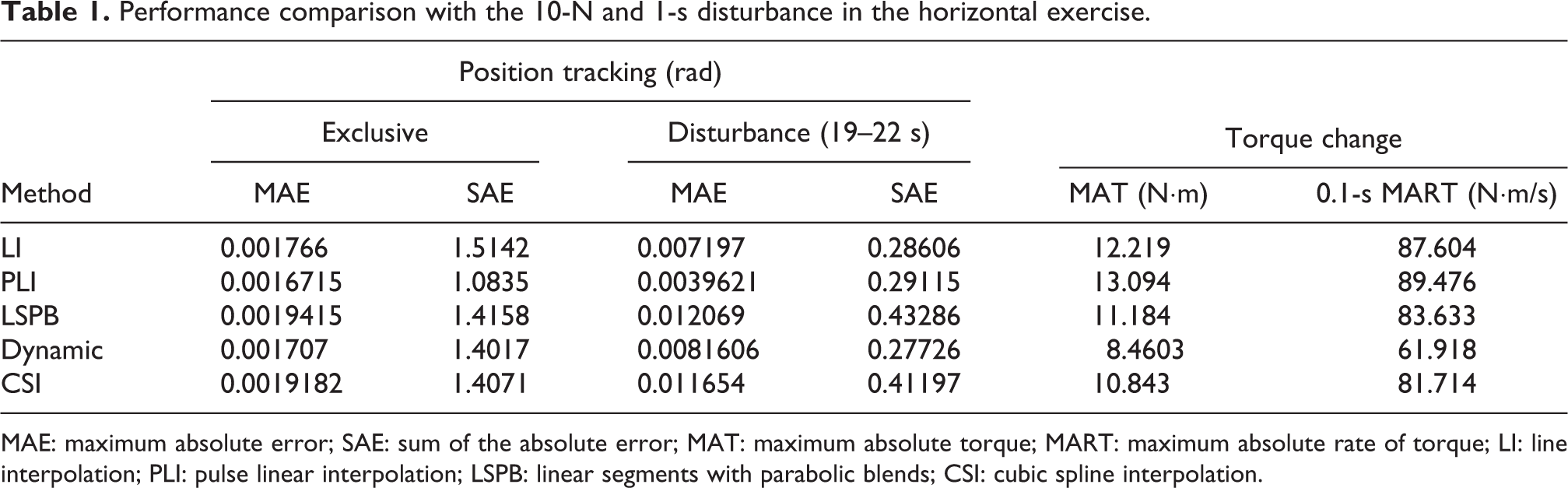
MAE: maximum absolute error; SAE: sum of the absolute error; MAT: maximum absolute torque; MART: maximum absolute rate of torque; LI: line interpolation; PLI: pulse linear interpolation; LSPB: linear segments with parabolic blends; CSI: cubic spline interpolation.
Performance comparison with the 10-N and 1-s disturbance in the vertical exercises.

MAE: maximum absolute error; SAE: sum of the absolute error; MAT: maximum absolute torque; MART: maximum absolute rate of torque; LI: line interpolation; PLI: pulse linear interpolation; LSPB: linear segments with parabolic blends; CSI: cubic spline interpolation.
Qualitative experiments
Methods
In the qualitative experiments, a healthy volunteer was guided to deliberately present three different PSTLs during the training, that is, without any disturbance, a minor disturbance, or a major disturbance. Each type of PSTL was presented as far as possible at the same position and with the same simulating action. The minor and major disturbances imply that the impaired limb vibrates with ±3° and ±5° during the training movements, respectively. To exclude the impact of accidental factors, the volunteer was required to perform numerous simulation exercises before the experiments, and the experimental results were represented with the mean value of five results.
Results
During the qualitative experiments, the PSTL was categorized into major, minor, and no disturbance, respectively. In the vertical experiments, the movement performances of the different interpolation methods with the time-varying PSTL are studied. The tracking error and control torque are presented in Figure 9, and the minor and major disturbances were simulated during Part I and II according to the requirement mentioned in the “Methods” section, respectively. Similar to the quantitative experiments, the suggested dynamic strategy presents a smaller tracking error and lesser fluctuation of the control torque under the minor or major disturbances than the single LSPB method (see Figure 9).

Control performances with time-varying PSTL in the vertical exercise. PSTL: physical state of the training limb.
The suggested dynamic strategy dynamically employs different interpolation methods to plan the tracking movement, and the management under a minor and major disturbance is shown in Figure 10. It is evident from Figure 10 that the designed system works well with dynamic strategy. Comparing the forepart with the hind-part of each disturbance segment, the frequency of applying PLI is different: It is more frequent in the hind-part of the minor disturbance segment and forepart of the major disturbance segment. Furthermore, comparing Figure 10(a) and (b), PLI is employed more frequently in the large disturbance segment. It shows that the developed strategy can dynamically take advantages of PLI to plan the tracking movement and improve the entire performance according to the PSTL.

Management with dynamic motion planning strategy in vertical exercise. (“0”–“2”, namely LSPB, LI, and PLI, respectively): (a) minor disturbance segment and (b) major disturbance segment. LSPB: linear segments with parabolic blends; LI: line interpolation; PLI: pulse linear interpolation.
To quantify the compared control performances with the dynamic and LSPB interpolations, the tracking errors and driving torques recorded in the vertical exercise were also analyzed. Table 3 presents the comparison results. The tracking performance analysis was of three types according to the PSTL, namely, without disturbances, minor disturbances, and major disturbances. Comparison of the indices (MAE and SAE for the tracking performance, MAT and 0.1-s MART for the stability and smoothness) reveals that the dynamic motion planning strategy exhibits better movement performances under the disturbances than the LSPB method for the trajectory tracking, stability, and smoothness that are in agreement with the results of quantitative experiments.
Performance comparison of the position tracking and control torque in the vertical exercise.

MAE: maximum absolute error; SAE: sum of the absolute error; MAT: maximum absolute torque; MART: maximum absolute rate of torque; LSPB: linear segments with parabolic blends.
In addition, the horizontal movement performances with a time-varying PSTL were also investigated using the dynamic and routine LSPB interpolations. The analyzed outcomes of the movement performances are presented in Table 4, and the management of the suggested dynamic strategy during the disturbances is shown in Figure 11. The results are in agreement with the inferences from the vertical experiments.
Performance comparison of the position tracking and control torque in the horizontal exercise.
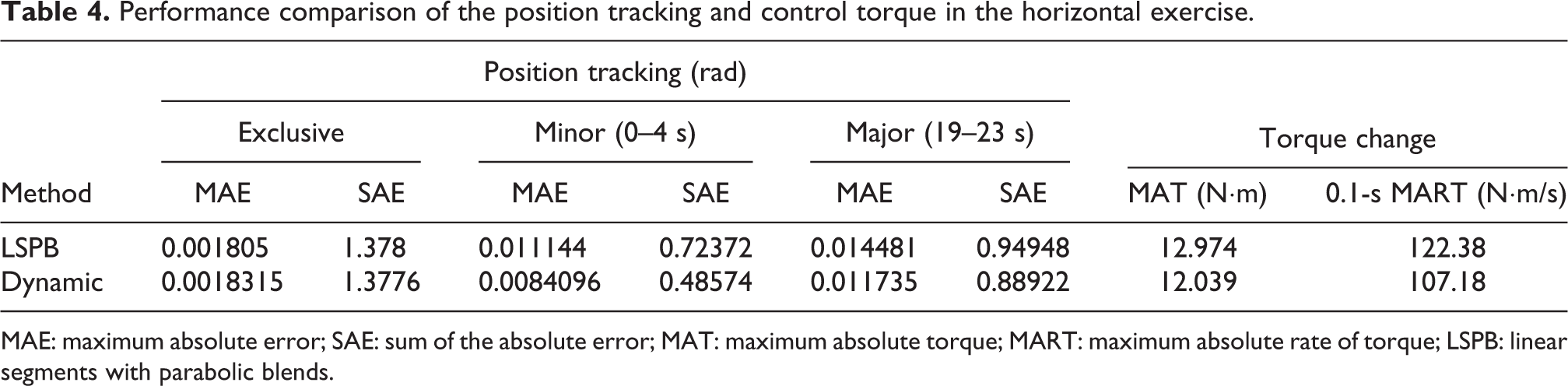
MAE: maximum absolute error; SAE: sum of the absolute error; MAT: maximum absolute torque; MART: maximum absolute rate of torque; LSPB: linear segments with parabolic blends.

Management with dynamic motion planning strategy in horizontal exercise. (“0”– “2”, namely LSPB, LI, and PLI, respectively): (a) minor disturbance segment and (b) major disturbance segment. LSPB: linear segments with parabolic blends; LI: line interpolation; PLI: pulse linear interpolation.
Clinical experiments
To further verify the effectiveness of the proposed dynamic motion planning method for clinical application, a stroke patient (see Figure 12) was conducted to carry out some passive training exercises. The patient did exercises with the WAM rehabilitation system twice a day (morning and afternoon, respectively), both horizontally and vertically, and each type of exercise was done for 10 min. The training movement done in morning was managed with LSPB method while was managed with proposed dynamic motion planning method in afternoon. The experiment was conducted for 5 days. The horizontal movement was done with 80 sessions, and the vertical movement was done with 100 sessions, managed with each interpolation method. All the motion data were analyzed and presented with average value in Table 5. Comparing the two methods with position tracking and torque change, the dynamic motion planning demonstrates better movement performances than the LSPB method whether with horizontal or vertical exercises, which served the patient with more stable and smooth rehabilitation movements. The result of clinical experiments is consistent with one of the functional experiments.

Training movements in the horizontal and vertical planes—clinical experiment.
Performance comparison of the position tracking and control torque with clinical experiments.

MAE: maximum absolute error; SAE: sum of the absolute error; MAT: maximum absolute torque; MART: maximum absolute rate of torque; LSPB: linear segments with parabolic blends.
Discussion
This study proposed a novel dynamic motion planning strategy to define and follow the tracking movement according to a dynamic PSTL for improving the motion smoothness of robot-aided passive rehabilitation training. The tracking performances were demonstrated and analyzed through quantitative and qualitative and clinical experiments with horizontal and vertical exercises. The tracking error and torque change were adopted to assess the movement stability and smoothness, and four indices were employed to present the movement performances from different aspects. The results of the position tracking and control torque variation show that the motion control using the proposed dynamic motion planning strategy can exhibit with better performances for tracking and smoothness.
One of the main aims of this study is to investigate the effectiveness of the dynamic motion planning method for improving the movement performances. Adopting different interpolation methods to plan a trajectory tracking according to the time-varying PSTL is the core idea of the dynamic motion planning strategy. In this study, the LSPB method is employed as the fundamental method to follow the desired trajectory, and the LI is employed under a minor disturbance, whereas PLI is employed for a major disturbance. The proposed dynamic strategy based on the PSTL flexibly adjusts different methods to define and follow the tracking movement according to the PSTL and effectively utilizes the characteristics of each method completely. Thus, it is a promising strategy to manage the training movement and improve the movement performances under disturbances.
In a clinic, different treatments are adopted to match the different states of an illness. The impaired limb of a patient is usually connected to the robot end-effector for passive neurorehabilitation training during the early rehabilitation stage, where the assist-as-need theory is not applicable. 13 Owing to the clinical particularity of stroke patients who suffer from neurological damages and are easy to be subjected to secondary damage of the muscle tissue during the rehabilitation training, the robot-aided exercises must be stable and smooth, particularly, under certain disturbance conditions. Concurrently, a stable and smooth movement without a sudden change in the speed does not activate the muscle reflexive mechanism 42 and is helpful to arouse the active cooperation and participation of the subject from a psychological perspective. In some cases, such as passive training combined with an EEG and designed rehabilitation games, the end-effector is usually required with a high-performance movement. The designed control system with the novel dynamic motion planning strategy can satisfy this rehabilitation requirement by providing better performance movements. In addition, the suggested strategy is promising to be developed and applied in other areas to improve the robotic motion performance that is desirable for all application robots.
As discussed above, the dynamic motion planning strategy is developed to improve the performances of robot-aided passive rehabilitation training. As far as trajectory tracking is concerned, the higher the tracking precision is, the better is the performance and stability, which is the main purpose of this investigation. In clinic, there are some safety-related cases during the rehabilitation training, for example, stretch reflexes. Considering the particularity of the subject, safety is strongly addressed in developing robot-based rehabilitation systems. How to deal with these safety-related cases in which the precise trajectory tracking in passive mobilization mode might not be appropriate? In our previous research, 26 a hierarchical control strategy is developed for these safety-related cases. Safety is another very important issue.
This investigation has some limitations: In the current stage, we demonstrated plane training exercises with the proposed strategy. In the next investigation, we shall plan some spatial trajectories for compound motion training and investigate the corresponding dynamic motion planning strategy to achieve stable and smooth spatial exercises. We employed LSPB as the fundamental method to investigate the effectiveness and practicability of the proposed dynamic strategy for improving the motion performances. Each interpolation method possesses its own characteristics, and the future work will focus on investigating the principles for effectively integrating different interpolation methods under different conditions based on different methods. The functional (quantitative and qualitative) experiments with a healthy volunteer and clinical experiment with a stroke patient just verified the practicability and effectiveness of the dynamic motion planning method for improving the movement performances. As a future work, we shall conduct some pilot investigations to further test the efficacy of the proposed method in clinical trials.
Conclusion
To improve the motion performances for robot-aided passive rehabilitation movements, a novel dynamic motion planning strategy was proposed in this article. During the movement training, an appropriate interpolation method corresponding to the mutative PSTL is dynamically selected to predefine a motion trajectory to effectively exert the particularities of each method. The results of the quantitative and qualitative and clinical experiments verified the effectiveness and practicability of the designed control system with the proposed dynamic motion planning strategy for improving the motion performances in terms of tracking and smoothness.
Footnotes
Acknowledgments
The authors thank Dr Simei Wang of Changzhou Dean Hospital for her professional suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China [61773078], Industrial Technology Project Foundation of ChangZhou Government [CE20175040], Jiangsu Ordinary University Science Research Project [14KJB510002], and Open Foundation of Remote Measurement and Control Key Lab of Jiangsu Province [YCCK201303].