
Abstract
Closed-form mechanisms of relative manipulation robot is an effective structure which helps to improve the accuracy and flexibility in technological processes. Unfortunately, the requirement about knowledge of exact dynamics of closed-form mechanisms of relative manipulation robot is arduous since it consists of numerous joints and links, and the identification of the kinematic relationship of closed-form structure is also complicated. This causes several shortcomings for controlling closed-form mechanisms of relative manipulation robot by using vector control algorithms because these methods require exactly dynamical equations of control systems. In contrast, the fuzzy controllers do not require knowledge of detailed mathematical equations of the control system since the fuzzy sets aim to capture the semantics of natural linguistic terms present in the fuzzy controller knowledge. Moreover, they have capability of handling uncertain and noisy signals, this helps to deal with the external environmental forces. This article proposes a fuzzy-based controller for closed-form mechanisms of relative manipulation robot to overcome mentioned problems by eliminating the identification of exact dynamics and kinematic constraints of closed-form structure. To verify the performance of the proposed method, the fuzzy-based controller is applied to a welding task by using a model of two-component mechanism which includes one closed-form manipulator and one serial manipulator. The welding task is also conducted by using conventional controllers in which the detailed dynamical equation is applied for the proportional–derivative (PD)-type and proportional integral derivative (PID)-type computed torque controllers, whereas the fuzzy-based controller just uses several nominal parameters.
Keywords
Introduction
Recently, mechanisms of relative manipulation (MRM) robot has been researched and applied to technological processes in which the technological manipulations are conducted in moving coordination space, whose purpose is to enhance the flexibility and accuracy. The MRM robot consists of two or more manipulators of which constructive mechanisms cooperate with other ones to serve a desired task. The kinematic structure of component mechanisms of MRM robot may be open chain, closed-form, or parallel. Open chain mechanisms allow formulating the dynamical model by using independent generalized joint variables and Lagrange equations of the second kind; and as a result, it gives favorable conditions to analyze the forward-inverse kinematics and identify the dynamical elements to serve control issues. However, the vibration and deformation during the technological processing are still open problems for the accuracy since serial manipulators are used as components of MRM robot. 1 –3 To solve this problem, the closed-form manipulator includes actuated joints and passive joints (herein their links form a closed-form structure), which is proposed to improve the stiffness of MRM robot’s structure. As a result, the accuracy is increased since the vibration and deformation are decreased. Unfortunately, the use of closed-form manipulator makes kinematic relationship and dynamical equations of MRM robot more voluminous and complicated because not only does the dynamical model of closed-form MRM robot require Lagrangian multipliers, but it also has to guarantee the technical requirements and the kinematic connections of closed-form structure simultaneously. 4,5 Furthermore, the external environmental forces are difficult to determine analytically, which is also problem for dynamical equations. Today, vector control algorithms are dominantly applied in robotics, largely because of the inherent simple design and application. These methods require detailed dynamical model of control systems; thus it causes several drawbacks for controlling closed-form MRM robot.
Introduced by Zadeh, 6 the human-like inference mechanism of fuzzy logic is an effective tool to present expert knowledge in engineering issues. The fuzzy controllers do not require knowledge of detailed mathematical equations of the control system and allow a more intuitive approach, compared to vector control algorithms. Besides, they have capability of handling uncertain and noisy signals. All this is achieved at the expense of a substantial increase in the computational requirements compared to the vector control algorithms, whereas the design process itself usually relies on the expert knowledge of the control system. In which, fuzzy control has been successfully applied in many industrial problems. 7 –29
This article presents a model of fuzzy-based controller for a closed-form MRM robot, which aims to overcome the difficulty of closed-form MRM robot’s kinematic and dynamical identification in control. The proposed model of MRM robot is a two-component mechanism which includes a closed-form manipulator and a serial manipulator. Closed-form manipulator brings the tool (tool-robot) and serial manipulator brings a jig which is used to hold the workpiece (jig-robot).
The rest of this article is organized as follows. In the second section, a closed-form MRM robot model as long as its kinematics and dynamics are proposed. Then, the brief description of PD-type and PID-type computed torque controllers is proposed in the third section. A fuzzy-based controller is formed in the fourth section. In the next section, a welding task is conducted by using the proposed closed-form MRM robot in which the PD-type and PID-type computed torque controllers and the proposed fuzzy-based controller are applied to the welding task in simulation level to evaluate the performance of proposed method. The last section presents the conclusions of the research work.
The proposed closed-form MRM robot model
The proposed closed-form MRM robot is presented in Figure 1, which consists of a tool-robot, a jig-robot, and the technological object. This proposed closed-form MRM robot is used for welding task (or laser machining, or grinding, or milling, etc.). The tool-robot is closed-form, and the jig-robot is serial. The tool-robot includes unmovable base

The proposed closed-form MRM robot model. MRM: mechanisms of relative manipulation.
Kinematic analysis
The kinematic parameters of the proposed closed-form MRM robot model are presented in Figure 1 and Table 1 where d 11, a 11, a 12, a 14, and a 15 are tool-robot’s kinematic dimensions; θ 20, d 20, a 20, and α 20 are position and orientation of the jig-robot’s base frame with respect to base frame x 10 y 10 z 10 (Denavit–Hartenberg parameters), d 22 is jig-robot’s kinematic dimension.
Robot’s kinematic parameters.

The vector of joint coordinates of closed-form MRM robot is performed by

where n is the number of actuated joints and s is the number of passive joints.
The tool is attached on

where the bottom right indices of elements are represented by the index of the link
By dint of coordinate transformation method, the relationship between

In practice, the explicit performance of equation (3) just can be conducted for three first lines of translational components. It is difficult to perform explicitly for orientation components. In general, the relationship of

here

According to technological requirements and the number of degree of freedom (DOF) of MRM, relative motions of tool with respect to workpiece can be presented

where

The equation (6) guarantees the relative motions between tool and workpiece which is formed based on technological requirements and the number of DOF of MRM robot. This equation is called program constraint or program motion of robot. 1 –5
In addition, the closed-form structure includes constraints of joint coordinates, presented

herein

These kinematic constraints depend on mechanical structure of robot; and hence, they are called mechanical constraints. 1 –5
Based on technological requirements and matrix transformation method, equations (4), (6), and (8) are established, including (6 + n + s) equations. Using these equations, the set of (6 + n + s) parameters in (1) and (2) can be specified, and so that the trajectory of robot’s motion are determined (6 + n + s).
The jig-robot is 2-DOF manipulator which consists of two actuated joints. The tool-robot is a closed-form structure which consists of three actuated joints and two passive joints. The kinematic closed-form chain of tool-robot is described by
Actuated joints of tool-robot are

Dynamical model
Table 2 presents dynamical parameters of the proposed MRM robot model, where the center of mass, the inertia tensor, and the mass are received from Solidworks. A dynamical model of MRM robot is represented 1 –5

here







here J
Ti, mi
, and J
Ri are the translational Jacobian, the mass, and the rotational Jacobian of the ith link, respectively.

Closed-form MRM robot’s dynamical parameters.
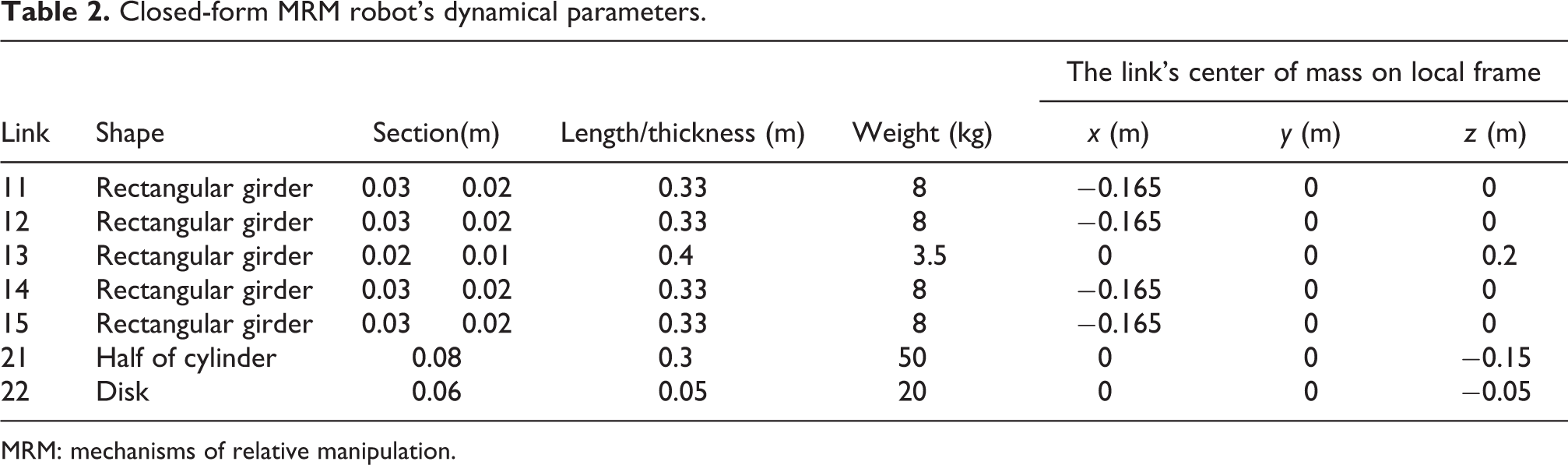
MRM: mechanisms of relative manipulation.
Elements of

here

where

In practice, only nominal parameters of the proposed MRM robot are available for controllers since the accurate parameters
One of well-known control methods is computed torque control which requires exactly dynamical equations of control systems. Besides, processing the mechanical constraints at each iteration causes the complexity and lingering for controller. It is more difficult to design real-time controller for closed-form MRM robot since closed-form structure is complex.
Above difficulties can be eliminated by using fuzzy-based controller.
17
In this article, to verify the performance of proposed controller, a comparison among fuzzy-based controller, PD-type and PID-type computed torque controllers is implemented in simulation level by using the proposed MRM robot model. It is assumed that the dynamical model (11) is determined exactly for the PD-type computed torque controller, whereas PID-type computed torque controller only uses exact values of
PD-type and PID-type computed torque controllers
To implement a desired task, the MRM robot is controlled in the joint space so that the tool conducts the relative motions on workpiece based on technological requirements. Throughout this article,

Although closed-form MRM robot contains seven movable links, we uniquely consider the five first elements of
Based on the second equation of equations (11), the acceleration of passive joints

herein


Matrix
PD-type computed torque controller
The control rule of PD-type computed torque controller is presented

PID-type computed torque controller
The control rule of PID-type computed torque controller is presented

In the same way to PD-type computed torque controller,
Control framework
The control framework of the PD-type and PID-type computed torque controllers are shown in Figures 2 and 3, respectively, in which inverse kinematics with Jacobian is used to pre-calculate the desired joint values, based on the requirements of desired task. The controller adjusts the driving torque on each actuated joints through the position error and the velocity error. In this scenario, the PD-type computed torque controllers uses the exact dynamic model of control systems since it is assumed that exact dynamic equations are identified, and PID-type computed torque controller uses exactly dynamical equations (11) except for

The scheme of PD-type computed torque controller.

The scheme of PID-type computed torque controller.
Fuzzy-based controller
The fuzzy inference mechanism is known to be computationally more efficient than the vector control algorithms, which is mostly due to the avoidance of the requirement of detailed mathematical model of the control system. This is a great tool which helps to come to real-time application, and it works well with optimization and adaptive techniques. 32 –36
The procedure of fuzzy control formulation
To construct fuzzy-based controllers for solving several engineering problems, the following scheme including five main tasks should be conducted: – Based on the requirements of engineering tasks, determining the inputs outputs of control systems and their physical domains. – Defining the membership function to fuzzificate inputs and outputs into the fuzzy sets. Herein, the number of linguistic values should chose so that the fuzzy set reflects adequately the features of control system and the fuzzy rule base is not too complicated. Then, the sub-physical domain for each linguistic value should be defined suitably for each linguistic value. – Identifying the fuzzy rule base based on the features of control systems where fuzzy rule base demonstrates the relationship among inputs and outputs through the linguistic values. – Choosing the composition of fuzzy relations to infer the outputs’ fuzziness through the fuzzy rule base. Since each input (or output) always belongs to two sub-physical domains describing two different linguistic values, the input (or output) at one moment can be described by two linguistic values. As a result, one input (or output) belongs to several fuzzy rules at the same time, so a composition of fuzzy relations should be used to infer the fuzziness of one fuzzy clause by using one operator and then infer the fuzziness of output from whole fuzzy rule base. – Finally, to obtain the actual control quantity, a de-fuzzification must be used to map the fuzziness values of outputs to their physical values.
Fuzzy controller for closed-form MRM robot
Based on above scheme of fuzzy approach, a fuzzy-based controller is formulated to solve mentioned problems for closed-form MRM.
In general, it is difficult to obtain a precisely dynamical equation of closed-form MRM robot. The use of the PD-type and PID-type computed torque controllers for controlling closed-form MRM robot meets several shortcomings, and we must assume that components of dynamical equations can be determined exactly; however, it is impossible in reality. This observation raises the need for using the human-like decision of fuzzy logic to build-up the controller for closed-form MRM robot. For fuzzy-based controller, the mechanical interactive force
In this article, the fuzzy controller has two linguistic input vectors and one linguistic output vector, which are denoted by



Based on Ali et al., 37 the fuzzification of the input and output variables into the fuzzy terms is conducted by using five-triangular-membership function which is illustrated in Figure 4. Herein, FLi is the fuzzy term of each linguistic value, determined by subdomain Xi in physical domain [Min, Max] of inputs/output. This membership function is used for all of the input and output.

Description of five-triangular-membership function.
The relationship among inputs and outputs is summarized in Tables 3 and 4 of which N, P, and Z stand for negative, positive, and zero, whereas S and B stand for small and big, respectively. The physical domains of Fei, Fdei and Fui are different although their linguistic sets are similar. Their fuzzy values may be similar; however, their real physical domains are different for different inputs/output after the normalization of their membership values to physical values since the membership values just describe the fuzziness in individual input/output’s physical domains. In other words, the rule sets for each active joint are different although they use the same linguistic values to describe inputs and output because the range of physical domains of inputs and output are different. The linguistic rule base has 25 fuzzy rules:
Fuzzy terms.

Fuzzy rule base.
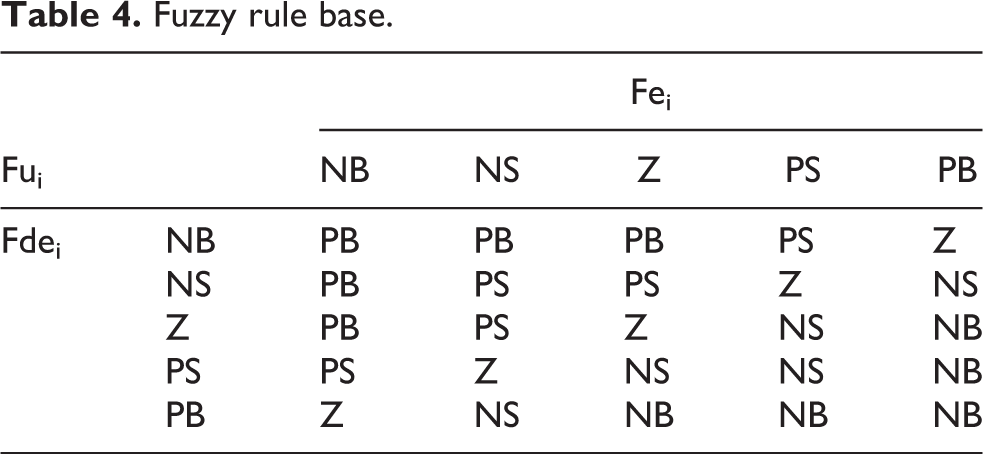
R1: If Fei is NB and Fdei is NB then Fui is PB or
…
R25: If Fei is PB and Fdei is PB then Fui is NB.
The rule base of proposed fuzzy-based controller can be presented by (32) and (33)


The max–min composition is used for the inference mechanism of this rule base, which is defined by the membership function-theoretic and set-theoretic expressions, described by equations (34) and (35), 32 whose purpose is to determine the fuzzy quantity of the outputs after the fuzzy rule set.


The range of inputs are determined based on the desired errors; and the range of outputs are determined through the range of inputs and the nominal values of
Estimated physical domains of inputs and output.

Finally, to obtain the actual control quantity of

The framework of fuzzy-based controller is shown in Figure 5, in which inverse kinematics with Jacobian is used to calculate the desired joint values, based on the requirements of desired task. The controller adjusts the driving torque on each actuated joints through the position error and the velocity error. In this scenario, the fuzzy-based controller just uses several nominal dynamical parameters. The kinematic bindings of closed-form mechanism, dynamic deviations, and noises are considered as unknown components. By doing this, not only is the computational cost of fuzzy-based controller lower than PD-type and PID-type computed torque controllers, but the controller building-process based on fuzzy logic is also more easily.
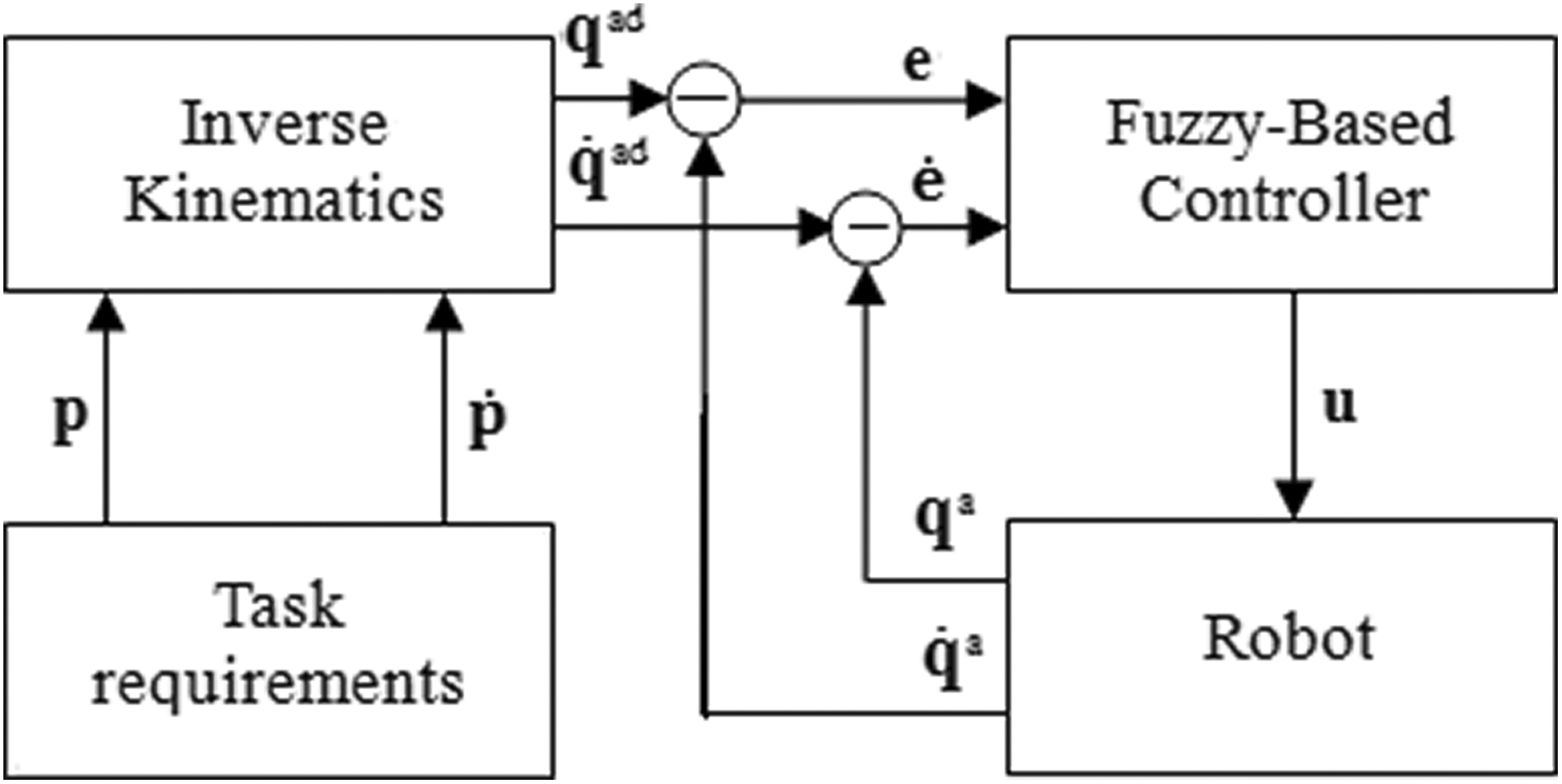
The scheme of the fuzzy-based controller.
Evaluation
To verify the proposed controller, a welding task is conducted by using the proposed MRM robot as shown in Figure 6. Other scenarios using the PD-type and PID-type computed torque controllers are also implemented, whose purpose is to compare with the proposed method.

Definition of welding path.
Description of welding task
Welding technical parameters are shown in Table 6. The tube 3 is welded with machine part 2 following butt-weld 4. During the work, part 2 is fixed on jig-robot’s table: – The intersection of tube surface and machine part’s surface makes up the butt-weld 4, which is tilted an angle γ to x
22, and parallel with y
22. – Welding path is a circle, with the radius is r. The coordinates (x
d, y
d, z
d) is located at the center of the circle. – The axis of welding tool is coplanar and tilted an angle β to the axis of tube. – The allowed technological velocity of tool’s head along welding path is v
h. – Welding tool’s head move along welding path, calculating kinematics by Newton-Raphson algorithm with desired error ε = 10−6, time step Δt = 0.001, obtaining trajectory and velocity of MRM robot’s links.
Welding technical parameters.

Implementation and results
To verify the proposed fuzzy-based controller, the welding task is conducted in three scenarios using fuzzy-based controller, PD-type and PID-type computed torque controllers, respectively. The control framework for these scenarios is shown in Figures 2 and 3 for the PD-type and PID-type computed torque controllers and Figure 5 for the fuzzy-based controller. Herein, task requirements are the technological requirements of welding tasks.
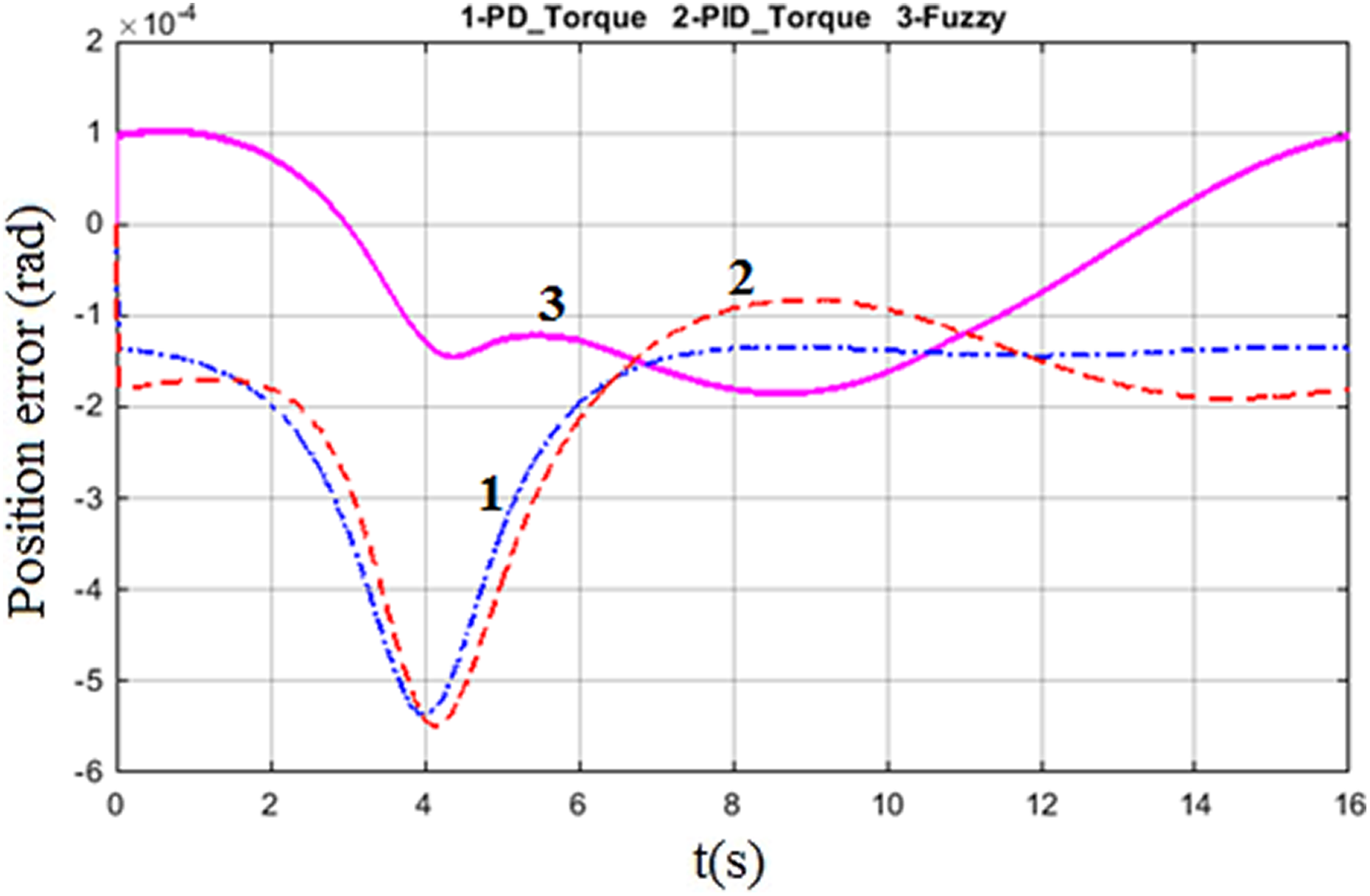
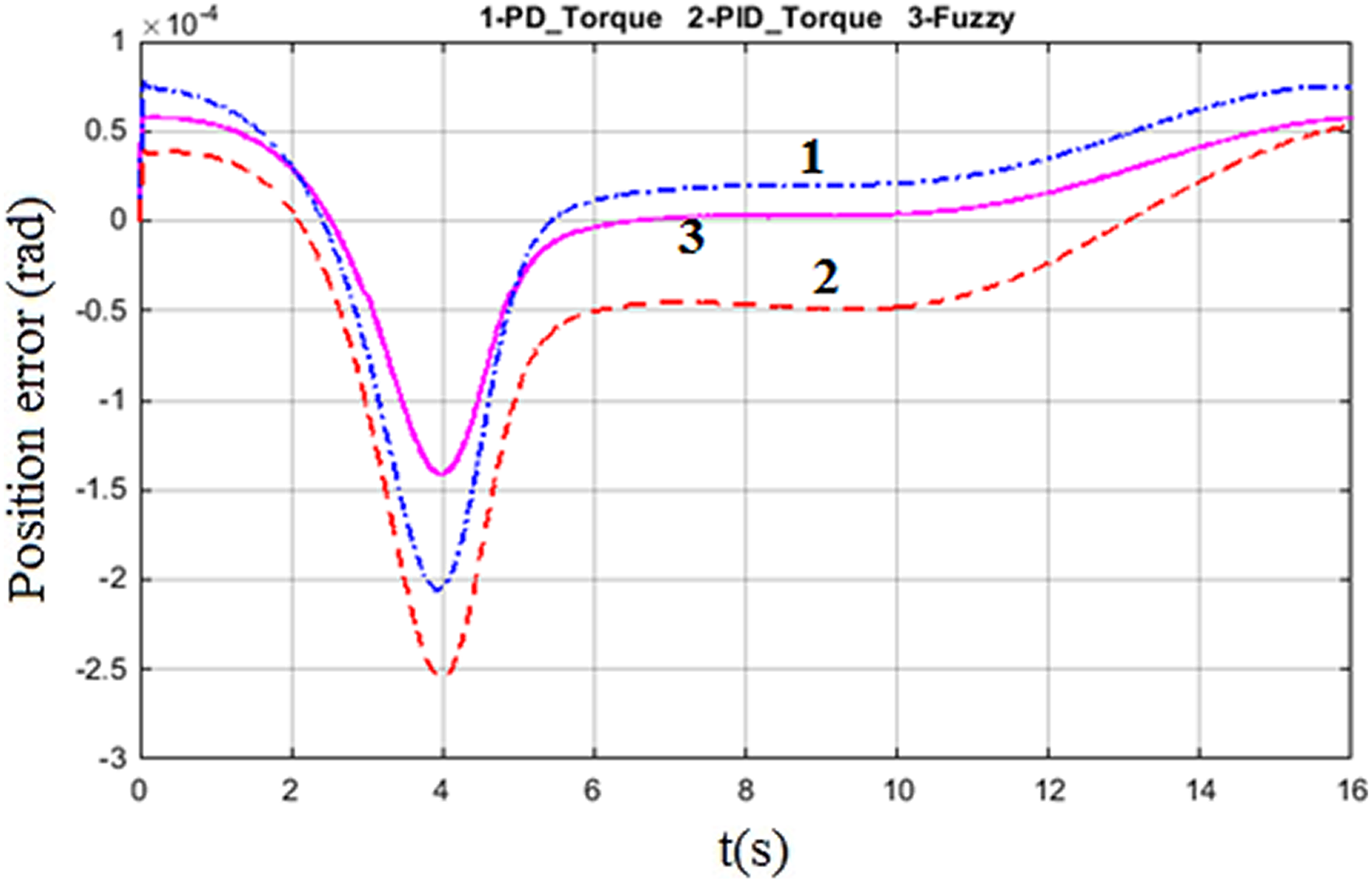
The simulation results of the implementation of welding task are shown in Figures 7 to 13. The results have shown that the fuzzy-based controller is more accurate than the PD-type and PID-type computed torque controllers even though the PD-type and PID-type computed torque controllers use detailed dynamical model of closed-form MRM robot, whereas the proposed fuzzy-based controller just uses the nominal parameters. The position error of each joint by using fuzzy-based controller is less than by using PD-type and PID-type computed torque controllers, and as a results, the position error of welding path by using fuzzy-based controller is smaller than by using PD-type and PID-type computed torque controllers. It is clear that the fuzzy-based controller is an effective tool for complex-structured robots and handling uncertain and noisy signals.

The desired and measured trajectory of (a) MRM robot’s five actuated joints, and (b) welding path in Cartesian coordinate system x 22 y 22 z 22 of jig-robot’s table.

The position error between desired and measured values of joint 11.

The position error between desired and measured values of joint 12.

The position error between desired and measured values of joint 13.
The position error between desired and measured values of joint 21.
The position error between desired and measured values of joint 22.

The position error between desired and measured values of welding path.
Conclusion
A fuzzy-based controller is presented in this article, whose purpose is to overcome several shortcomings in closed-form MRM robot control. The inference mechanism of fuzzy logic equips controllers with opportunities to reduce the difficulty of MRM robot’s kinematic and dynamical identification. Furthermore, the obtained results have shown that the proposed controller is more accurate than the PD-type and PID-type computed torque controllers. The analysis and results in this article is a meaningful contribution to expand the research and application of modern theories for complex-structured robots control. In the next research, an algebraic approach will be applied to fuzzy-based controller to improve the controller’s accuracy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.