
Abstract
To overcome the problems of structural parametric uncertainty and cable transmission model complexity, a nonlinear controller based on time-delay estimation and fuzzy self-tuning is proposed. The unknown dynamics and disturbances are estimated by time delaying the state of motion immediately before. The control gains are self-tuned by a fuzzy controller, which can reduce the errors caused by system’s uncertainties and external disturbances. Compared with the conventional Proportional-derivative (PD) and time-delay control, the result shows that the proposed control scheme based on time-delay estimation can improve the joint trajectory tracking accuracy of cable-driven robot by significantly reducing the control gains. With the PD gains self-tuned by fuzzy strategy, the mean square errors of trajectory tracking are decreased approximately by 5–20% more than the conventional time-delay control with constant gains. In addition, the experimental result shows that the proposed method has an effective inhibitory effect on dead zone in cable-driven joints. Experiment performed on position tracking control of a 2-degree-of-freedom cable-driven robot is presented to illustrate that the controller has the advantages of simple and reliable structure, model-free, strong robustness, and high tracking accuracy.
Introduction
Cable-driven robot usually mounts motor, reducer, and other transmission mechanisms on the base or away from joints, and the motion and force are transmitted by cables between actuator and joint. 1 Compared with the common robots, it has lightweight, low joint inertia, and large payload to mass. Cable-driven robots have been widely applied in various fields, such as industry, medical rehabilitation, bionic hands, and service. 2 –5 It has received great attention of researchers and institutions in recent years. Unlike the gear transmission, the cable itself is flexible. Due to some factors like tensioning or reversal, the tension is time varying during the transmission process, which makes cables more difficult to control. 6 In addition, the winding of cables brings an unknown and complex frictional environment. Therefore, the precise modeling and control of kinematics/dynamics for cable-driven robot become a hot spot although many difficulties exist. 7
Because the multi-degree-of-freedom (DOF) robot is a strongly coupled nonlinear multiple-input and multiple-output and complex system, other nonlinear factors, such as the cable flexibility and transmission friction, pose the obstacles to the precise modeling and parameter identification. 8 To solve the problem of the uncertainties of system parameters and the difficulty of precisely acquiring dynamics model, the research of high-precision and high-speed control of the cable-driven robot has become a new focus. 9 A method using Gaussian process regression and data cleaning to reduce position and angular errors achieved precise control to a cable-driven surgical robot, Raven Ⅱ. A H∞ methodology with cable tension distribution algorithm was proposed for a vision-based position control of 6-DOF cable-driven parallel robots (CDPRs). 10 Although the methods show good trajectory tracking performance, the identification of kinematic and dynamic parameters is necessary and complex. Besides, Okur provided a full-state feedback nonlinear robust controller for tendon-driven robots in the presence of dynamical parametric uncertainty and additive external disturbances, while much information that the controller requires leads to much complexity. 11
To solve the complexity of dynamic modeling and external disturbances, time-delay estimation (TDE) technique provides a good control method. 12,13 The core of TDE is that the system dynamics at the current moment can be estimated by the last motion state of the closed-loop system, so as to compensate for the various uncertainties and disturbances. 14,15 It is a model-free control algorithm with simple structure and fast calculation to achieve good effects, and it has been widely applied in various fields. 16 –18 Many TDE-based sliding mode controllers have been proposed to perform high-precision and high-speed control with fast-tracking convergence and smooth motor inputs. 19 –22 To overcome slow data acquisition rate of an autonomous underwater vehicle, an integral sliding mode controller with conventional TDC was used to improve the performance. A continuous fractional-order nonsingular terminal sliding mode based on TDE ensures faster convergence and higher tracking precision under heavy lumped uncertainties.
Based on the abovementioned research studies, considering the structural characteristics and control difficulties of cable-driven robot, it is difficult to adopt a model-based method to control. Therefore, a model-free method based on TDE combined with fuzzy strategy should be developed to realize high-precision tracking control of cable-driven robot.
Dynamic model
The complete dynamical equations of cable-driven robot can be expressed as follows



where
The complete dynamical equation of cable-driven robot can be obtained by combining the equations (1), (2), and (3)

Design of controller
Design of proportional-derivative (PD) controller based on TDE
Expression (4) can be rewritten as

where

which shows that


where
By combining equations (7) and (8), the following equation can be written as

Assuming that

which shows that the closed-loop system is asymptotically stable. Estimated parameters for

where

Considering equation (10), the law of TDC can be expressed as

which shows that precision of the dynamic model is mainly depending on
Control of cable-driven robot based on TDE is illustrated in Figure 1 and the whole control system is divided into two parts: one is a conventional PD controller depending on the feedback error of system; another is a compensator for system based on linear estimation of control targets. In equation (13),

The control diagram of the TDE-based for cable-driven robot system. TDE: time-delay estimation.
Actually, the sampling period is unable to approach infinitesimal. Thus, in the case of limited sampling periods, estimation error of

TDE error is defined as

By combining equation (14) into equation (15), the feedback error of the robot under closed-loop control can be expressed as

This equation is related to the control torque. And assume that

As a result, the solution of the differential equation of system error
Design of fuzzy PD controller based on TDE
Based on the PD controller with TDE, a fuzzy PD controller for parameter self-tuning is designed as shown in Figure 2.

The diagram of the fuzzy PD controller with parameter self-tuning.
Fuzzy field of input and output variables and values of linguistic variables
Deviation e between encoder and expected joint angle and deviation rate

Membership function
Membership function has a certain effect on control of the system. The steeper and higher resolution the membership function graph is, the higher control sensitivity it has; the milder and lower resolution it is, the better stability the system has. Considering the sensitivity and robustness of control, membership functions are composed of Gauss functions and triangle functions as shown in Figure 3.

The member functions of
Establishment of fuzzy rules
The fuzzy PD controller calculates
The fuzzy rules of Kp.

The fuzzy rules of Kd.


The surface for adjusting Kp and Kd.
The fuzzy PD controller of cable-driven robot uses Mamdani-type fuzzy inference.
23
–26
The accurate values of output are calculated by area center algorithm. Convert the solution of
Simulation and experiment
Simulation
Control simulation of 4-DOF cable-driven robot by SimMechanics is presented. The parameters are listed in Table 3.
The parameters of control simulation for cable-driven robot.

Some parameters of the above PD controller are appropriately tuned. And for the convenience of comparison, parameters of the two controllers based on TDE are kept same. The results of joint tracking errors of the three control strategies are shown in Figure 5. The max absolute errors (MAE) and mean square errors (MSE) and quantization errors of joints are calculated in Table 4. 27 –30

The trajectory tracking errors of three controllers.
The statistical table of simulation.

According to the results listed in Table 4, TDC has greater advantage than the conventional PD controller. To meet trajectory tracking with high precision, higher gains are needed for the conventional PD controller with slower convergence of errors. However, TDC is able to significantly optimize the trajectory tracking with smaller PD gains and faster convergence. Moreover, its errors are optimized 3 times better than PD controller and can fulfill the requirement of high precision. Furthermore, besides advantages of TDC, a fuzzy controller with parameter self-tuning can adjust control gains in real time. The errors are reduced 5–20% and more.
Simulation above shows that TDE-based controllers have better trajectory tracking performance and reliability than the conventional PD controller with lower gains, higher precision and faster convergence. That parameter self-tuning fuzzy controller can improve the dynamic performance and robustness of the system and enhance the ability of anti-interference.
Experiment
Experiments are carried out with two-joint cable-driven robot. Trajectory tracking results of the two joints under three control strategies are shown in Figure 8, the tracking errors are shown in Figure 9 and the motor inputs are shown in Figure 10. The mean error, max error, and mean square error of the two joints are calculated in Table 5.
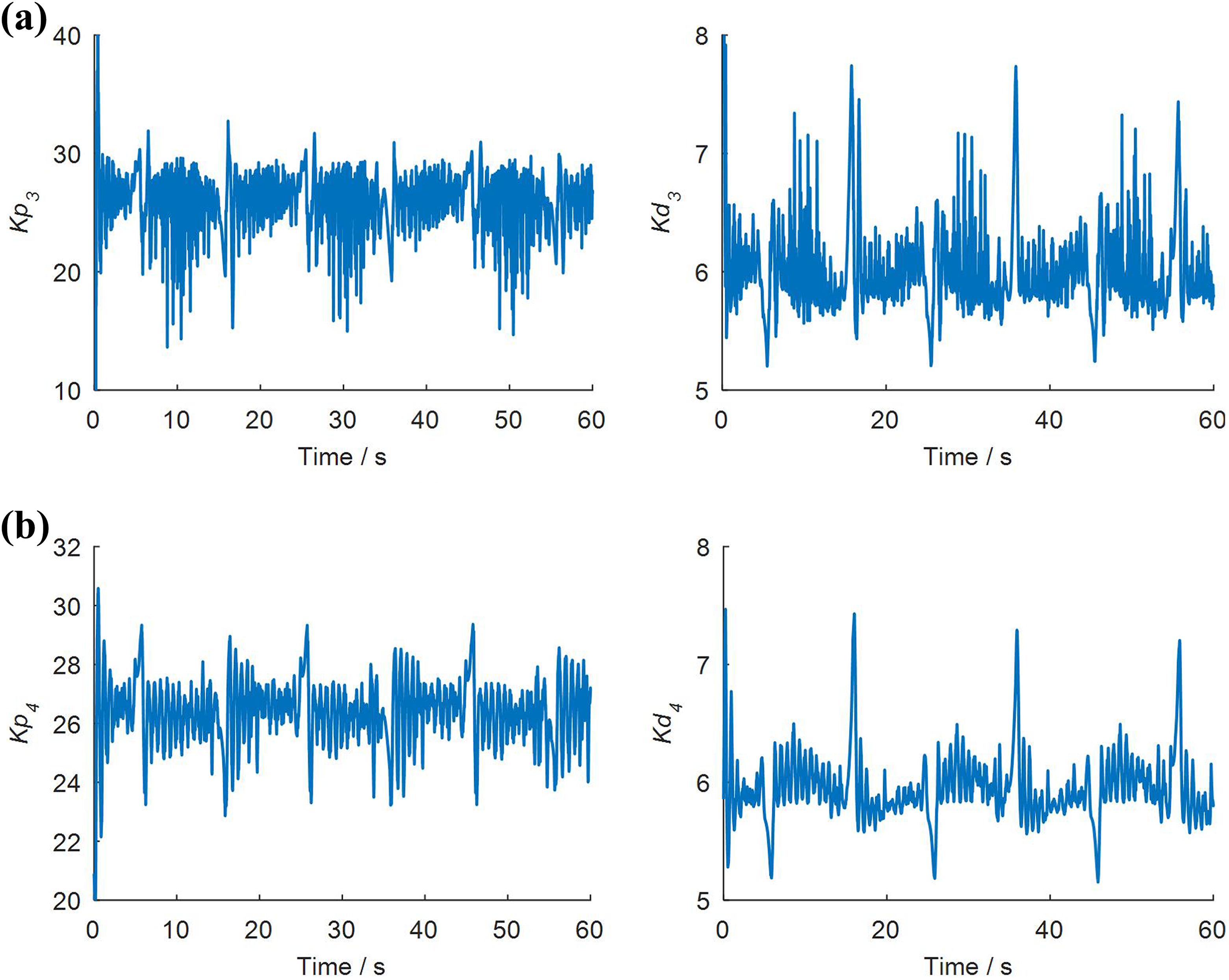
Curves of the control gains adjusting: (a) self-tuning PD parameters curve of joint 3 and (b) self-tuning PD parameters curve of joint 4: (a) back slash curve of joint 3 and (b) back slash curve of joint 4.

Curves of the trajectory tracking.

Curves of the backhaul of the cable-driven joints.

Curves of the tracking error.

Curves of the motor input.
Statistical table of experiment.

According to the above data, TDC and fuzzy TDC with parameters self-tuning are better than the conventional PD controller. And benefiting from parameter self-tuning, the latter owns more advantages. Self-tuning PD parameters of joint 3 and joint 4 are shown in Figure 6.
Set the TDC as a reference (set to 100%), the relative percentages of MSE of joints 3 and 4 under conventional PD are 872.8% and 948.9%, respectively. Results of Fuzzy TDC are 91.0% and 85.4%, respectively. The relative percentages of mean error have the similar conclusion. As shown in Figure 7, error of the conventional PD controller has larger dead zone of backhaul when joints reverse their moving direction. The reason is, although tensioner has been adopted, the cables still get a slight stretch caused by its flexibility when the robot works. When cable-driven robot reverses its moving direction, the direction of internal tension in cables interchanges, and as a result, small dead zone exists. Backhaul dead zones of two joints are shown in Figure 8. Compared with the other two methods, TDE-based controllers are more robust with smaller angle error while backhaul dead zone appearing.
Conclusions
A nonlinear control technique based on TDE with fuzzy self-tuning is proposed, which can estimate the unknown dynamics parameters by the last motion state, and reduce the errors caused by system uncertainties and external disturbances. The method is simple and reliable in structure and has little dependence on the system model. The calculation of the complex dynamics for cable-driven robot can be avoided. Besides, it has the advantages of high trajectory tracking accuracy and strong robustness. The parameters self-tuned by fuzzy controller can adjust control gains dynamically to the change of the system model under estimation error and external disturbances. Compared with conventional TDC and PD controller, the simulation and experiment results show that the method based on TDE can improve the trajectory tracking accuracy of cable-driven robot while reducing the control gains significantly. Combined with the gains self-tuned by fuzzy controller, the MSEs of trajectory tracking are further reduced by 5–20%.
Furthermore, it can be found from experiments that the traditional PD controller has certain insufficiency of the dead zone brought by the cable driven when the joint rotation reversing, while the controller based on TDE has an effective inhibition effect. The result shows that the proposed method can meet the requirements of practical application, which further confirms the advantages of validity and robustness.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) discolsed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [51705243, 51575256], the Natural Science Foundation of Jiangsu Province [BK20170789] and China Postdoctoral Science Foundation [2018M630552].