
Abstract
During the dive operation of the Jiaolong deep-sea manned submersible, the synchronization clock in the manned cabin may be falsely triggered and cause asynchrony between it and the synchronization clock installed in the mothership, rendering it impossible for the ultrashort baseline to provide the correct position of the Jiaolong deep-sea manned submersible. To solve this problem, this article proposes an emergency resynchronizing method for the two synchronous clocks, used by the ultrashort baseline, in the Jiaolong deep-sea manned submersible. Initially, based on the depth and horizontal range measured by the ultrashort baseline and the manned submersible depth transmitted by the acoustic communication system, the time-delay difference between the two synchronous clocks is estimated. The time-delay difference is then compensated by delaying the synchronous clock trigger signal by an external waveform generator in the mothership. Finally, by comparing the depth measured by the ultrashort baseline and the manned submersible depth transmitted by the acoustic communication system, the time-delay difference is finely adjusted. Using this method, the ultrashort baseline problem, which occurred suddenly while the Jiaolong deep-sea manned submersible was diving, is successfully solved.
Keywords
Introduction
The Jiaolong is a Chinese deep-sea research manned submersible, which can dive to a depth of more than 7000 m. Its maximum dive depth is 7062 m, covering approximately 99.8% of the ocean area. 1 A crucial issue that cannot be ignored in deep-sea resource surveys and scientific research is the underwater positioning and navigation of deep-sea manned submersibles. The ultrashort baseline (USBL) is an important technical method for realizing the underwater positioning and tracking of manned submersibles and for ensuring the safety of their underwater operations. 2 Using the USBL, the mothership can obtain the manned submersible position in real time. Further, by digital underwater acoustic communication, the manned submersible can obtain its own position at longer time intervals to assist the pilot in driving.
When the USBL is used for localizing the Jiaolong deep-sea manned submersible, it operates in responder mode. The synchronous clocks installed in the mothership and manned submersible are used to provide synchronous trigger signals. However, because of the restricted space in the manned cabin, the synchronous clock was falsely triggered, causing a time-delay difference between the two synchronous clocks. This time-delay difference resulted in a significant deviation in the USBL positioning result from the true value, rendering it impossible to accurately locate the manned submersible. The emergency resynchronizing method proposed in this article, which comprises three steps—time-delay difference estimation, coarse compensation, and fine compensation—solved this problem successfully. Subsequently, an accurate measurement of the manned submersible was obtained from the USBL, because there was no time-delay difference.
In particular, we provide the following contributions in this work. We give the theory of time-delay difference estimation: when there is a time-delay difference between the two synchronous clocks, the time-delay estimation of the USBL is incorrect (there is a fixed deviation), whereas the angle estimation is correct. After estimating the time-delay difference, we present a means of compensating this difference using a waveform generator, including coarse compensation and fine compensation. The dive data of the Jiaolong deep-sea manned submersible were used to analyze the performance of the emergency resynchronizing method. The results show that the time-delay difference estimation accuracy is on the order of 30 ms, and fine compensation is an important complement to coarse compensation.
The remainder of this article is organized as follows. The second section presents a general description of the Jiaolong manned submersible and USBL. The third section gives the problem statement and the general idea to solve the problem in detail. In the fourth section, we present the theory of time-delay difference estimation. In the fifth section, we consider the time-delay difference compensation, including coarse compensation and fine compensation. In the sixth section, we analyze the emergency resynchronizing performance in a real application. Finally, we summarize the results in the final section.
Jiaolong deep-sea manned submersible and USBL
Jiaolong deep-sea manned submersible
The development of the Jiaolong deep-sea manned submersible was one of the major projects of the National 863 Program, during China’s 10th five-year plan period. From August 2009 to July 2012, 1000-, 3000-, 5000-, and 7000-m sea trials of the Jiaolong deep-sea manned submersible were completed, and the maximum dive depth reached 7062 m, covering 99.8% of the ocean area. After successfully completing the 7000-m sea trial, the Jiaolong deep-sea manned submersible was utilized for experimental applications. From 2013 to 2017, the Jiaolong deep-sea manned submersible completed four experimental application voyages and performed 100 dive operations in the South China Sea, Pacific Ocean, and Indian Ocean. It collected a wealth of biological, rock, and sediment samples and obtained a large quality of high-definition video, fine topographical, and in situ detection data. Thus far, the Jiaolong deep-sea manned submersible has completed 150 dives. The success of these voyages demonstrates the unique advantages of the Jiaolong deep-sea operations and effectively promotes China’s deep-sea science and technology development program. To maintain its advanced nature, a 2-year upgrade was performed on the Jiaolong deep-sea manned submersible, from the end of 2017.
The Jiaolong deep-sea manned submersible can carry three people (one pilot and two scientists). It includes structural, hydraulic, control, acoustic, and other systems and is not only capable of photography, video recording, and the accurate mapping of the seafloor topography and geomorphology but can also obtain seafloor water samples, sediments, and biological samples using mechanical hands and other tools. Table 1 lists the main technical specifications of the Jiaolong deep-sea manned submersible.
Main technical specifications of the Jiaolong deep-sea manned submersible.

USBL: ultrashort baseline.
Ultrashort baseline
The USBL has two modes: transponder mode and responder mode. 3 In the transponder mode, an interrogation signal is sent from the surface transducer array to the seabed transponder. After this interrogation signal is received, an acknowledge signal is transmitted from the transponder. The time delay between the transmission of the interrogation signal and the reception of the acknowledge signal is used for calculating the range. In the responder mode, if there is a cable, a trigger pulse is sent to the responder through it; otherwise, a pair of high-precision clocks are used to trigger the responder and surface processing unit, synchronously. The time delay between the synchronous pulse triggering moment and the reception of the acknowledge signal is used for calculating the range. The sound speed is needed for calculating the range from the time delay. Thus, an accurate sound speed profile guarantees accurate positioning. In addition to the range, the azimuth is needed for positioning and can be computed by analyzing the phase of the received signals. Combining the GPS and USBL, the exact location of the manned submersible can be obtained.
During an actual dive operation, the manned submersible uses the responder mode. Synchronous clocks are installed on the mothership and manned submersible and are clocked before the manned submersible is launched. The manned submersible obtains its position through the following three steps (as shown in Figure 1): (1) the responder beacon on the manned submersible transmits a positioning pulse at regular intervals (e.g. 8 s). The position of the manned submersible can be obtained after the USBL on the mothership receives the pulse. (2) The manned submersible sends its status information to the mothership at longer time intervals (e.g. 64 s) through the acoustic communication system (ACS). (3) After the mothership receives this status information, it sends manned submersible position information, calculated by the USBL, to the manned submersible through feedback communication.

Steps required by the Jiaolong deep-sea manned submersible for obtaining its position using the USBL. USBL: ultrashort baseline.
Problem statement
When the Jiaolong deep-sea manned submersible performed a dive operation in a certain sea area, starting at 14:06 local time, there was a significant deviation in the positioning result of the USBL (the actual dive depth was approximately 2700 m, and the USBL positioning depth was more than 8600 m) from the true value, which lasted for a considerable duration. Hence, the precise positioning of the manned submersible could not be realized. 4 As the USBL is the main positioning tool for the Jiaolong deep-sea manned submersible, if the fault cannot be corrected in time, the submersible will have to return immediately.
Information available at the sea-trial site mainly includes information on the submersible such as conductivity–temperature–depth, energy, life support, and information on the mothership such as USBL positioning, mothership position, and attitude. 5 For the above-mentioned emergency, after detailed investigation of the synchronization signal waveform, period, amplitude, USBL configuration parameters, transmission network, operating conditions, and other factors, we found that the positioning results of the USBL, before and after position deviation, were approximately 35° northwest, indicating that the USBL can always correctly calculate the azimuth of the submersible. Therefore, it is highly probable that the USBL incorrectly estimated the range; as the instantaneous time-delay estimation was incorrect, a USBL positioning error occurred. Considering the USBL operation mode, the main reason for the USBL positioning error was the asynchrony between the synchronous clock on the mothership and that on the manned submersible, resulting in a certain time-delay difference. After viewing the manned cabin video and acoustic communication record, 3 it was determined that the synchronous clock in the manned cabin was inadvertently shifted; this was also verified by field judgment.
After establishing the reason for the USBL positioning error, the next step is to rapidly and accurately estimate the time-delay difference between the two synchronous clocks, based on the information in the field, and compensate accordingly. This article proposes an emergency resynchronizing method for the two synchronous clocks, used by the USBL, in the Jiaolong deep-sea manned submersible. Initially, based on the depth and horizontal range measured by the USBL, and the manned submersible depth transmitted by the ACS, the time-delay difference between the two synchronous clocks is estimated. The time-delay difference is then compensated by delaying the synchronous clock trigger signal by an external waveform generator. Finally, by comparing the depth measured by the USBL and the manned submersible depth transmitted by the ACS, the time-delay difference is finely adjusted. Using this method, we have successfully solved the USBL problem, which occurred suddenly while the Jiaolong deep-sea manned submersible was diving.
Time-delay difference estimation
Theory
The manned submersible sends its status information, including its depth, measured by a high-precision depth gauge, to the mothership at longer time intervals (e.g. 64 s) through the ACS. When the manned submersible is descending or ascending (about 40 m/min), the depth received by the mothership does not exactly correspond to that of the manned submersible in real time but is prior by at least 64 s. To minimize the influence of acoustic communication delay, the estimation of the time-delay difference between the two synchronous clocks is generally used, when the manned submersible heave speed is zero. Furthermore, the following assumptions are made: (1) The sound speed is 1500 m/s; (2) the acoustic signal propagates in a straight line; (3) the USBL measurement and the manned submersible depth transmitted by the ACS are obtained simultaneously.
The theory regarding the time-delay difference estimation between the two synchronous clocks is as follows: when there is a time-delay difference between the two synchronous clocks, the time-delay estimation of the USBL is incorrect (there is a fixed deviation), whereas the angle estimation is correct. The available field information includes the USBL-measured manned submersible depth and horizontal range, and the manned submersible depth transmitted by the ACS (measured by a high-precision depth gauge). Ignoring sound line bending, as the angle estimate is correct, two similar triangles can be obtained, as shown in Figure 2. One is constituted by the real depth




Two similar triangles used for time-delay difference estimation.
The time delays corresponding to the two hypotenuses of the two similar triangles are as follows


Here, c is the speed of sound. Thus, the time-delay difference between the two synchronous clocks can be obtained

Estimation
The following information was obtained from the field: the USBL-measured depth,
Time-delay difference compensation
Coarse compensation
After estimating the time-delay difference between the two synchronous clocks, it is necessary to use a waveform generator to compensate for this difference. In this article, we consider the Agilent waveform generator, 33522B, as an example. Agilent waveform generator was put on the top of the USBL signal processing unit. Figure 3 shows the connection between the synchronous clock on the mothership and the USBL signal processing unit. Generally, the synchronous clock and USBL signal processing unit are directly connected by a coaxial cable, but during emergency resynchronizing, the synchronous clock is first connected to an external waveform generator, whose output is connected to the USBL signal processing unit.
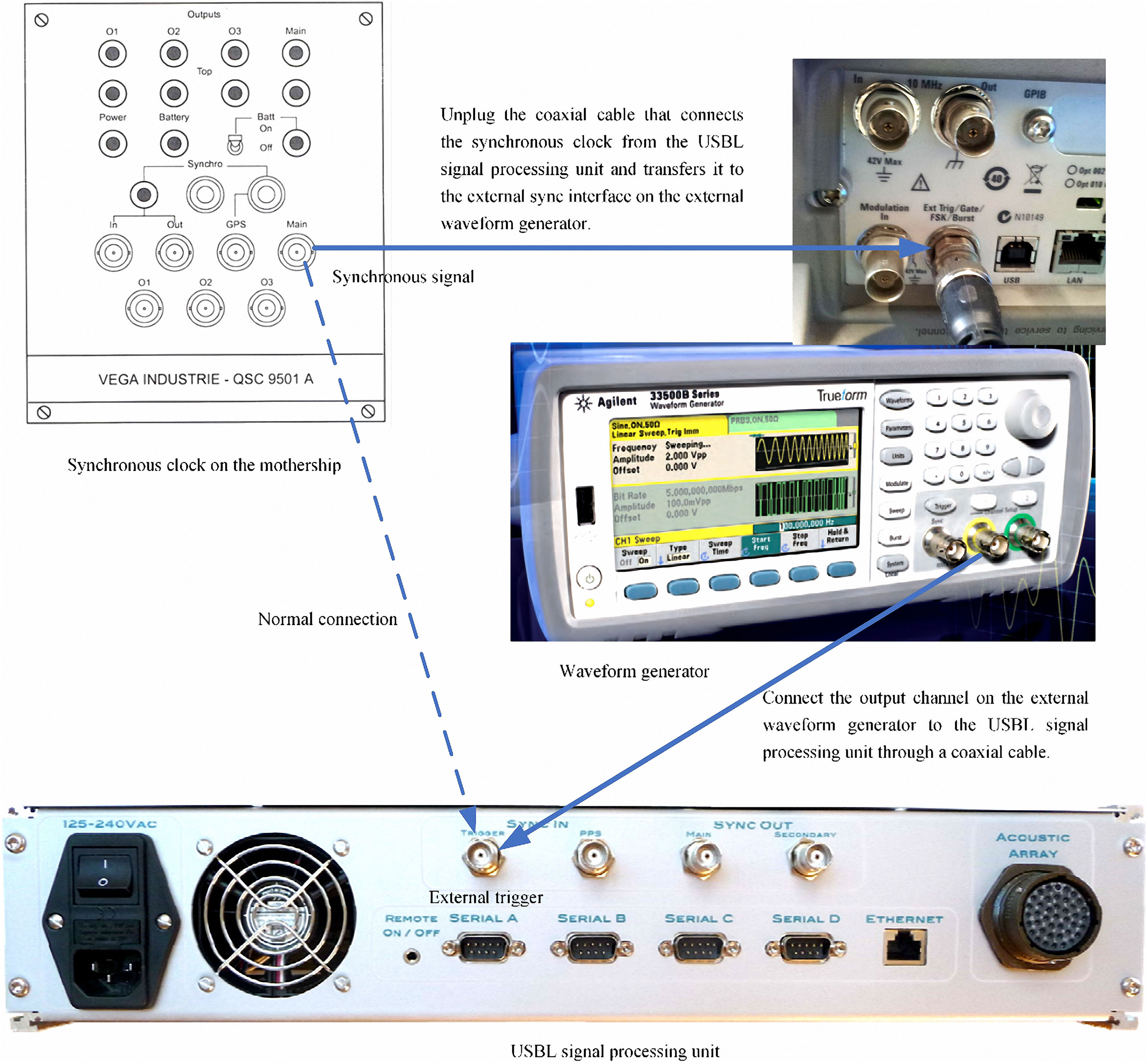
Connection between the synchronous clock on the mothership and the USBL signal processing unit. USBL: ultrashort baseline.
For the coarse compensation of the time-delay difference, the following four steps are required: Step 1. Unplug the coaxial cable that connects the synchronous clock from the USBL signal processing unit and transfer it to the external sync interface on the external waveform generator; connect the output channel on the external waveform generator to the USBL signal processing unit through a coaxial cable. Step 2. Select the output trigger signal form of the external waveform generator, according to the signal form of the synchronous clock. Step 3. Set the trigger mode of the external waveform generator to external trigger. Step 4. Enter the time-delay difference estimated by equation (6) as the trigger delay, in the external waveform generator.
In step 4, the time-delay difference between the two synchronous clocks,
Fine compensation
When estimating the time-delay difference between the two synchronous clocks, assumptions on the sound speed, acoustic signal propagation path, and acquisition time of the three quantities are made. However, the sound speed in the ocean varies with temperature, salinity, and depth and ranges from 1480 m/s to 1560 m/s; affected by changes in the sound speed with the depth, the acoustic signal does not propagate in a straight line, but a certain curvature occurs. As the ACS communicates digitally every 64 s, there is a certain time delay between the uploaded manned submersible depth and the USBL measured depth/horizontal range. Therefore, the time-delay difference estimation, based on the above assumption, can only provide an approximate value, that is, a coarse estimation.
To further improve the accuracy of the USBL positioning, it is necessary to finely adjust the trigger delay on the external waveform generator. For this, the rotary knob on the external waveform generator must be used for fine-tuning the time-delay difference entered in step 4, and the difference between the USBL measured depth and the manned submersible depth transmitted by acoustic communication should be compared: (1) an increase in the time-delay difference and an increase in the difference between the two depth values indicate that the time-delay differences should be reduced; (2) an increase in the time-delay difference and a decrease in the difference between the two depth values indicate that the time-delay differences should be increased; (3) a decrease in the time-delay difference and an increase in the difference between the two depth values indicate that the time-delay differences should be increased; (4) a decrease in the time-delay difference and a decrease in the difference between the two depth values indicate that the time-delay differences should be reduced. According to the above four situations (Table 2), the trigger delay should be adjusted, until the USBL measured depth
Fine adjustment of the trigger delay according to the four situations.

Emergency resynchronizing performance analysis
To further analyze the emergency resynchronizing method proposed in this article, the dive data of the Jiaolong deep-sea manned submersible were analyzed systematically. Figure 4 shows the USBL positioning results during the entire dive of the Jiaolong deep-sea manned submersible. “No time delay difference” indicates the USBL positioning result, when there was no time-delay difference between the two synchronous clocks, before 14:06 local time; “With time delay difference” indicates the USBL positioning result, when the two synchronous clocks had a time-delay difference, from 14:06−14:40 local time; “After emergency resynchronize” indicates the USBL positioning result, when the time-delay difference between the two synchronous clocks was compensated, after 14:40 local time. It can be seen from the figure that, when there is a time-delay difference between the two synchronous clocks, the USBL positioning result has a large deviation in the horizontal plane, with an obvious deviation from the trajectory of the Jiaolong deep-sea manned submersible. Using the emergency resynchronizing method proposed in this article, the time-delay difference between the two synchronous clocks was compensated, and the USBL positioning result was consistent.
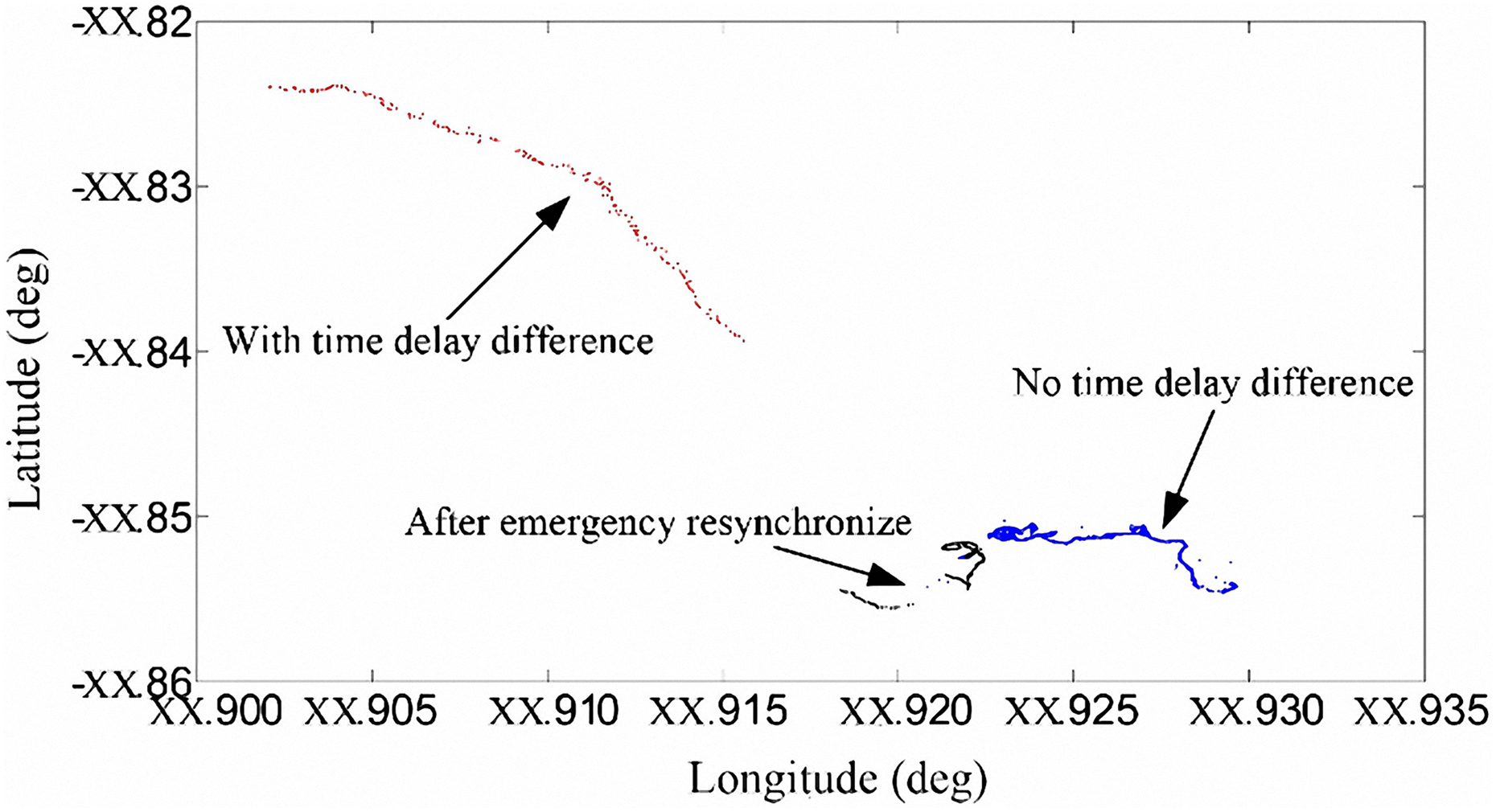
USBL positioning results during the entire dive of the Jiaolong deep-sea manned submersible. USBL: ultrashort baseline.
Figure 5 compares the USBL-measured depth to the high-precision depth gauge-measured depth of the Jiaolong deep-sea manned submersible. The inset graph is a zoom on the depth result, before and after time-delay difference compensation. It can be seen from the figure that when there is a time-delay difference between the two synchronous clocks, the USBL measured depth is between 8000 m and 10,000 m, which is a significant deviation from the measured value of the depth gauge; the inset enlarged graph clearly depicts the coarse and fine compensations: (1) With coarse compensation (14:40–14:52), the USBL measured depth varies from the depth gauge measurement by approximately 50 m. (2) With fine compensation (after 14:52), the USBL measured depth varies from the depth gauge measurement by 1 or 2 m, which corresponds to that without time-delay differences between the two synchronous clocks. This further emphasizes that the use of the USBL-measured depth/horizontal range and the manned submersible depth transmitted by the ACS can only provide a coarse estimation of the time-delay difference. Influenced by factors, such as the sound speed profile and inconsistent information acquisition time, the time-delay difference estimation accuracy is in the order of 30 ms.

Comparison between the USBL-measured and high-precision depth gauge-measured depths. USBL: ultrashort baseline.
Fine compensation, using the rotary knob on the external waveform generator, is an important complement to coarse compensation. The combination of coarse and fine compensation can accurately resynchronize the two synchronous clocks in an emergency. Subsequently, the USBL can provide an accurate measurement of the Jiaolong deep-sea manned submersible, because there is no time-delay difference.
Conclusions
This article proposed an emergency resynchronizing method for the two synchronous clocks, used by the USBL, in the Jiaolong deep-sea manned submersible. It involves three steps: time-delay difference estimation, coarse compensation, and fine compensation. Influenced by factors such as the sound speed profile and inconsistent information acquisition time, the time-delay difference estimation accuracy is in the order of 30 ms. Fine compensation, using the rotary knob on the external waveform generator, is an important complement to coarse compensation. The combination of coarse and fine compensation can accurately resynchronize the two synchronous clocks in an emergency.
The proposed USBL synchronous-clock emergency resynchronizing method can be applied not only to manned submersibles but also to other types of deep-sea vehicles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was partly supported by the Qingdao National Laboratory for Marine Science and Technology (grant no. QNLM2016ORP0406), the National Key R&D Program of China (grant no. 2017YFC0305700), the Taishan Scholar Project Funding (grant no. TSPD20161007), the National Natural Science Foundation of China (grant no. 41641049), the Shandong Provincial Natural Science Foundation (grant no. ZR2015EM005), the Shandong Provincial Key R&D Program (grant no. 2016GSF115006), and the Qingdao Independent Innovation Project (grant no. 15-9-1-90-JCH).