
Abstract
A widely used scheme for target localization is to measure the time of arrival of a wireless signal emitted by a tag, which requires the clocks of the anchors (receivers at known locations) to be accurately synchronized. Conventional systems rely on transmissions from a timing reference node at a known location for clock synchronization and therefore are susceptible to reference node failure. In this article, we propose a novel localization scheme which jointly estimates anchor clock offsets and target positions. The system does not require timing reference nodes and is completely passive (non-intrusive). The positioning algorithm is formulated as a maximum likelihood estimation problem, which is solved efficiently using an iterative linear least square method. The Cramér–Rao lower bound of positioning error is also analyzed. It is shown that the performance of the proposed scheme improves with the number of targets in the system and approaches that of a system with perfectly synchronized anchors.
Introduction
Wireless positioning 1 has attracted significant research interest in recent years due to its widespread applications. Various techniques have been developed for positioning, including those based on received signal strength (RSS) fingerprinting, round trip ranging (RTR), time of flight (TOF), time of arrival (TOA), and time difference of arrival (TDOA). Time-based approaches do not require site surveying as fingerprinting-based techniques and typically achieve higher accuracy than the RSS-based approaches. In particular, one of the most widely used schemes for target localization is to measure the TOA of a wireless signal emitted by a tag, which keeps the cost and power consumption of the tags low and can be used to locate existing commercial off-the-shelf devices (e.g. WiFi devices). 2
To locate a target based on TOA measurements, the clocks of the anchors need to be precisely synchronized. Particularly, the clock skew and clock offset of each anchor need to be estimated and compensated. 3 This is conventionally achieved by reference-broadcast synchronization,2,3 which estimates the clock skew and offset among anchors based on the TOA of beacons transmitted by a timing reference node (RN) at a known location. The drawback of this scheme is that the system is susceptible to the failure of the timing RN. In addition, the transmission of the timing RN may interfere with those of the targets and compromise the operation of the targets (e.g. in the case of tracking WiFi devices, the network throughput maybe reduced due to the transmissions of the timing RN). Differential TDOA-based localization described in Li et al. 4 and Makki et al. 5 does not explicitly synchronize the anchor clocks but still requires a transmitting timing RN as in the reference-broadcast scheme. A scheme similar to differential TDOA was proposed in Xu et al. 6 for acoustic localization systems. A synchronization-free TDOA-based localization algorithm was proposed in Kim and Chong, 7 which assumes that the target transmits ranging signals periodically and makes use of the estimated target position in the previous time step to estimate the current position. However, the positioning accuracy of such a system is degraded if the target position in the previous time step is incorrectly estimated. Joint synchronization and localization for TOF-based localization systems was studied in literatures8–12 and shown to improve the positioning performance. In particular, a Bayesian belief propagation scheme was proposed in Yuan et al. 10 for joint cooperative localization and clock synchronization. Extended Kalman filter was employed in Koivisto and Colleagues11,12 to jointly track the TOF and synchronize the clock between anchors and tags.
In this article, we consider a TOA-based passive positioning system with multiple targets and propose a novel scheme which jointly estimates the anchor clock offsets and target positions. The system does not require a timing RN and therefore is more robust than conventional systems that use reference-broadcast synchronization. In addition, it is completely passive and non-intrusive, allowing commercial off-the-shelf devices to be tracked without knowing the structure of the existing system or interfering with its operation (e.g. tracking WiFi mobile devices without incurring additional WiFi packet transmission in the network), as has also been considered in Jean and Weiss. 13 The positioning algorithm is formulated as a maximum likelihood (ML) estimator, which is solved efficiently using an iterative linear least square (LS) method. In addition, an algorithm for initializing the ML estimator is provided, which significantly improves the convergence of the iterative linear LS method. The Cramér–Rao lower bound (CRLB) of positioning error and clock synchronization error is also provided. The performance of the proposed scheme is compared against systems with perfectly synchronized anchors under various configurations, and it is shown that the performance gap diminishes as the number of targets increases.
System model
Considering a positioning system with
Each anchor

where
Suppose tag

according to equation (1), where

denotes the distance between node
To simplify the notations, we assume that the clock skew

The position of each tag is then estimated based on
In conventional systems based on reference-broadcast synchronization, the clock offset

According to equation (4), where
Joint clock synchronization and position estimation
In this article, we propose a TOA-based passive localization scheme which jointly synchronizes anchor clocks and estimates target positions. Specifically,


where
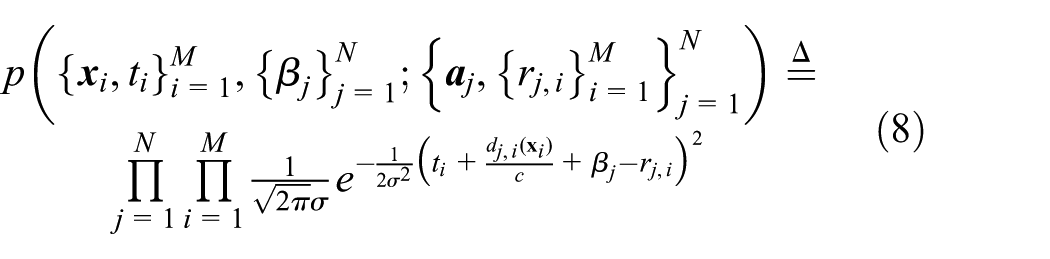
is the likelihood function, with
Since no timing RN is required, the proposed scheme is completely passive and non-intrusive and is more robust than conventional systems that rely on reference-broadcast for clock synchronization. Note that equation (6) falls into the category of TOA-based one-way ranging, since the distances between the targets and the anchors are readily available once
Iterative LS estimation
In the following, we describe an algorithm that solves equation (6) based on iteratively LS estimation. Plugging equation (8) into equation (6), it is readily shown that equation (6) can be reformulated as a nonlinear LS problem as in the following

where


collects all the unknown variables.
For each tag

where

Equation (9) can be approximated with a linear LS problem by substituting

where

and

respectively, where
The solution to equation (14) contains updated estimates of the target locations and can be used in equation (12) again to formulate an LS estimation problem to refine the position estimates. Accordingly, we propose an algorithm that iteratively estimates the unknown variables using linear LS method, which is described in Algorithm 1. Note that Step 2 can be solved straightforwardly through a linear LS problem with reduced dimension, by discarding the

Initialization
The tags’ positions are initialized using coarsely estimated anchor clock offsets. Specifically, taking the summation of equation (4) over the tags gives

Similarly, for a different anchor

Subtracting equation (18) by (19) and assuming that

gives

The anchors are then synchronized based on equation (21), and
Note that equation (20) holds approximately with large number of evenly distributed tags. When the number of tags is small, equation (20) does not hold in general. However, the above approach provides a coarse initial point for Algorithm 1, which typically converges within few iterations based on the result.
System requirement
A necessary condition for a valid positioning algorithm is that the number of measurements/constraints is greater than or equal to the number of unknown variables. For a 2D positioning system using the proposed scheme, this corresponds to

according to equations (6), (7), (9), and (14). Therefore, there needs to be at least four anchors in the system (since equation (22) never holds if
Performance analysis
The CRLB of the joint clock synchronization and position estimation problem is derived in this section to analyze the performance of the proposed scheme.
Combining equations (6)–(8), the log-likelihood function is given by

The CRLB for the unknown variables is given by Kay 17

where

where
It can be shown that

where each sub-matrix is given as follows

where


where


where


where

where

Based on equations (24)–(35), the standard deviation of positioning error for tag

and the lower bound for anchor clock synchronization error is given by

Simulation results
The performance of the proposed scheme was evaluated using computer simulation. Particularly, it is compared against a localization system with perfectly synchronized anchors. We considered a system with six anchors located at [20,0], [10,10√3], [−10,10√3], [−20,0], [−10, −10√3], and [10,−10√3], respectively (i.e. evenly placed on a circle with a radius of 20 m). The transmit time of the tags and the clock offsets of the anchors were drawn from uniform distributions
Proposed. The proposed scheme as described in equation (6) and Algorithm 1.
Clock-Synced. Conventional localization scheme where it is assumed that the anchors are perfectly synchronized (i.e.
Fixed number of tags
We first considered a scenario with four tags in the system, which were located at [0,0], [10,10], [0,−10√3], and [−20,10], respectively. Algorithm 1 was employed to estimate the tag positioning, using measurement data generated according to equation (4). The value of
Convergence
Figure 1 shows the typical convergence behavior of Algorithm 1 using both the proposed initialization algorithm and random initialization. Note that Algorithm 1 diverges if the randomly generated initial point is ill-conditioned, and the curve for random initialization in Figure 1 is generated using an proper initial point. However, Algorithm 1 always converges with the proposed initialization algorithm. It can be seen that the convergence is also improved significantly using the proposed initialization algorithm.

Convergence of Algorithm 1.
Positioning accuracy
Figures 2 and 3 show the estimated tag locations generated from 10,000 simulations and the corresponding cumulative distribution function (CDF) of positioning error, respectively. It can be seen that the results are consistent with the actual positions of the tags. For comparison, the results of a conventional positioning system with ideal clock synchronization are also shown in Figure 3. Note that the results provide an upper bound on the accuracy of the proposed systems. Particularly, the performance of the proposed system approaches that of an ideal system as the number of targets increases, as will be shown in Figure 5. The root mean square error (RMSE) of the positioning results is compared against the CRLB in Table 1. It can be seen that the performance of the proposed positioning algorithm is very close to the CRLB. It can also be observed that the positioning accuracy deteriorates as the tag moves out of the convex hull of the anchors, which is due to the increased geometric dilution of precision (GDOP). 18 This is consistent with conventional positioning systems.

Tag locations estimated with Algorithm 1.

Cumulative distribution function (CDF) of the positioning error for the proposed system and an ideal positioning system with perfect clock synchronization.
RMSE positioning error for the results in Figure 2 and the corresponding CRLB.
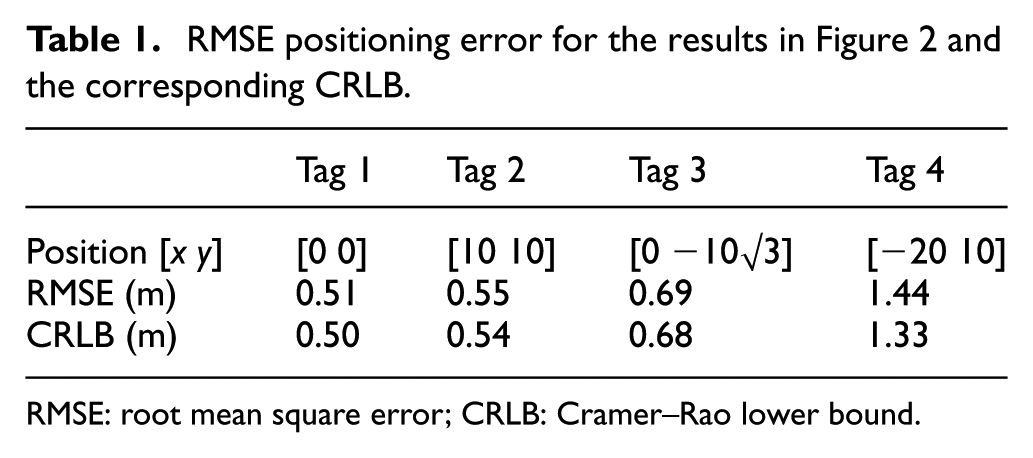
RMSE: root mean square error; CRLB: Cramer–Rao lower bound.
Clock synchronization accuracy
Figure 4 shows the CDF of the estimated clock offset errors for anchors 2–6. It can be seen that the medium synchronization error lies between 0.7 and 1.5 ns for different anchors. The RMSE of the estimated clock offset is compared against the CRLB in Table 2. It can be seen that the performance of clock synchronization is very close to the CRLB.

CDF clock synchronization error.
RMSE of the estimated clock offset and the corresponding CRLB.

RMSE: root mean square error; CRLB: Cramer–Rao lower bound.
Varying number of tags
This section investigates the dependency of positioning accuracy on the number of tags


where
Figure 5 shows the relationship between the positioning errors and the number of tags. It can be seen that the proposed positioning algorithm achieves the CRLB. The root mean square positioning error is 0.3 m if there are 50 tags in the system, which is only 20% higher than that for an ideally synchronized system (0.25 m). In addition, the positioning error of the proposed scheme decreases and approaches that of clock-synced as the number of tags in the system increases. The reason is that more measurements become available as the number of tags increases, which improves the accuracy of clock synchronization among anchors. This can also be explained by equation (35), which shows that the Fisher information related to the anchor clock offset increases with the number of tags.

Relationship between the positioning accuracy and the number of tags.
Formation of the tags
The dependency of positioning accuracy on the formation of the tags is studied for the proposed scheme in this section. We considered a case with four tags in the systems, which were evenly placed on a circle centered at (0 0) with a radius of 10 m. The formation of the tags were changed by varying the angular spacing between the tags (e.g. the tag positions are (10 0), (0 10), (−10 0), and (0 −10) if the angular spacing is 90° and (10 0), (5√2 5√2), (0 10), and (−5√2 5√2) if the angular spacing is 45°).
Figure 6 shows the relationship between the positioning errors and the angular spacing between tags, where the results are averaged over 1000 simulations. It can be seen that the performance of Clock-Synced hardly changes with the angular spacing, since the GDOP
19
is almost identical for all the tag positions on the circle. However, the positioning error of the proposed scheme decreases as the tags become more dispersed on the circle. The reason is that the clock offsets are estimated more accurately if the tags are dispersed. Intuitively, the ML estimation problem equations (6) and (7) are undetermined in the extreme case where all the tags collapse to one position. The reason is that tags’ position and anchor clock offsets are not observable from the measurements
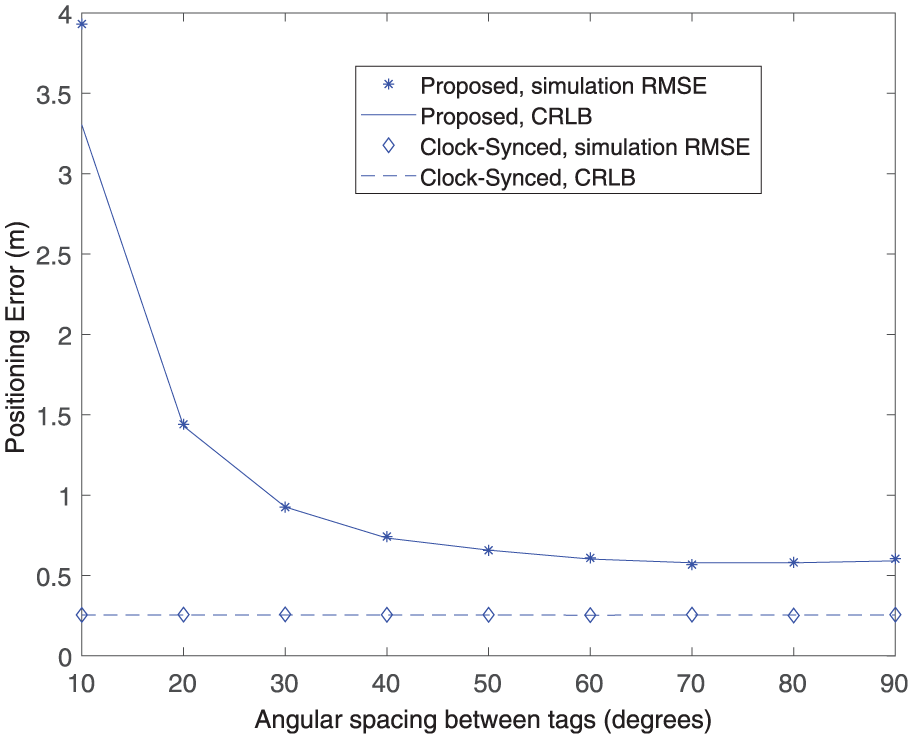
Relationship between the positioning accuracy and the angular spacing between tags. The tags are evenly placed on a circle centered at [0 0] with a radius of 10 m.
Conclusion
A joint synchronization and localization scheme was proposed for TOA-based positioning systems. The scheme does not require timing RNs as in conventional systems and therefore is more robust. In addition, it can be used to track commercial off-the-shelf devices in a completely passive and non-intrusive way. The positioning algorithm was formulated as an ML estimation problem, which was solved efficiently using an iterative LS method. The CRLB of positioning error was also analyzed. It was shown that the algorithm achieves the CRLB. In addition, the positioning error decreases with the number of tags in the system and approaches that of a system with perfectly synchronized anchors.
Footnotes
Appendix 1
Handling Editor: Mikko Valkama
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.