
Abstract
This article is concerned with the close formation problem of multiple underactuated surface vessels in the presence of model uncertainties, roll motion, and environmental disturbances. To effectively address these issues, a novel control scheme considering roll stabilization is designed by combing terminal hierarchical sliding mode control with Lyapunov direct method, which can quickly ensure a small formation error in a finite-time for vessels. Meanwhile, a new switching gain adaptation mechanism is utilized to reduce chattering and acquire faster adaptive rate without the excessive temporary tracking errors. Radial basis function neural network and finite-time observer are employed to deal with model uncertainties and disturbances, respectively. Furthermore, dynamic surface control technology is introduced to reduce the complexity of control law. Various simulations and comparison results are conducted to verify the effectiveness of theoretical results.
Keywords
Introduction
Close formation control is receiving a considerable attention due to its important applications, such as cooperative exploration of ocean resources, underwater pipe-laying, and marine replenishment. 1 Since the relative distance among vessels is small in close formation, the vessels are easily subjected to this kind of nonlinear complex disturbances from adjacent vessels and ocean simultaneously, resulting in serious roll motion, which will affect the navigation of vessels and the operation of instruments. Meanwhile, the drift caused by rolling will bring formation errors and even cause collisions. For close formation control, not only the motion in the horizontal plane but also the roll motion should be considered. Besides the above challenge, there are more degrees of freedom (DoFs) to be controlled than the number of independent control inputs for underactuated surface vessels (USVs). 2,3 Therefore, it is a great significance to implement and maintain a predefined formation mode so that multiple USVs can cooperate to complete a given task.
Currently, there are several popular formation control strategies, such as behavior-based control, 4 event-triggered real-time scheduling control, 5,6 virtual structures, 7 and leader–follower architecture, 8 –10 . Although the control methods are different in the existing literature, the research has always focused on the estimation of leader’s information, obstacle avoidance, and compensation lumped uncertainties including actuator failure, marine disturbances, and system uncertainties. 11 –14 Among them, most of the scholars have estimated the leader information by state estimator and lumped uncertainties by neural network approximation or takagi-sugeno fuzzy-approximation. 15 –17 Coping with information limitation of leader, a robust adaptive formation control was applied by combining the minimal learning parameter (MLP) algorithm, neural networks, and disturbance observer. 18 To solve unavailable velocity measurements, the fuzzy sliding mode robust controllers with distributed and self-organized capability based on the center-of-swarm guidance scheme were designed to estimate the unmeasured velocities and complete the predefined formation. 19 With less communications among USVs, a velocity-free formation controller was constructed by the finite-time observer (FTO) and time-varying ln-type barrier Lyapunov function method. 20 To deal with model uncertainties and environmental disturbances, a sliding mode control scheme was developed by estimating unknown parameter and upper bound. 11 Under a static communication network, a distributed continuous controller was presented to perform time-varying formation tracking control in dynamic, complex, and unpredictable marine environments. 21 Using directed graph theories, backstepping and the MLP algorithm, a distributed robust formation controller with the MLP-based and auxiliary adaptive laws was acquired to complete the cooperative formation under uncertain dynamics and external disturbances. 22 Without the prior knowledge of the environment and reference trajectory, a finite control set model predictive control was devised to deal with the problem of formation collision avoidance. 23 To ensure connectivity preservation and collision avoidance among networked uncertain USVs with different communication ranges, an adaptive output-feedback controller was obtained to accomplish formation tracking problem. 24 And then, the swarm control strategy based on swarm center position guidance was developed for each vehicle to follow the desired path and avoid collisions autonomously. 25 In Liu et al., 26 a distributed formation control strategy was proposed by combining the graph theory and the robust compensation theory to achieve the desired formation trajectory and time-varying formation pattern and to adjust the attitude of vessel. To avoid the singularity problem, a linear partitioned sliding mode controller was presented to achieve the desired formation within a finite time. 27 For solving the problem of formation-containment tracking with multiple leader vessels, a practical formation controller was adopted based on distributed extended state observer. 28 In Fu and Wang, 29 a bioinspired model-based hybrid strategy was proposed to avoid the chattering problem in sliding mode and speed jump that occurs in the backstepping method. Besides this, some other control strategies can also be applied for formation control. 30,31
Although researchers have done a lot of scientific research on the formation control of USVs, we found that, only few research results have studied the close formation control of USVs and the effect of rolling for formation. However, the formation safety will be threatened in case of the serious roll disturbances and small formation distance. Based on the above considerations, a novel control scheme with roll stabilization is designed by combing terminal hierarchical sliding mode control (THSMC) with Lyapunov direct method. THSMC includes two parts: hierarchical sliding mode control and terminal sliding mode control. The former is coped with the underactuation of vessel, and the latter ensure the finite time convergence of the formation errors. Compared with the references, 11,32,33 the proposed THSMC has faster convergence rate and smaller formation error to ensure superior formation performance and navigation safety.
Main contributions can be summarized as follows:
As the roll motion in close formation cannot be neglected, a novel roll stabilization control strategy is adopted to compensate the complex disturbances caused by adjacent vessels and marine environment to ensure the smaller formation errors.
For the small distance among USVs and underactuated characteristics of vessels, the THSMC is presented to make the USVs quickly adjust its position and attitude in a finite-time to avoid collisions. Meanwhile, the sliding surface is designed in terms of the velocity errors and switching gain. Moreover, a novel switching gain adaptation mechanism helps to reduce chattering and acquires faster adaptive rate without the excessive temporary tracking errors.
On the basis of the surge, sway, and yaw motion, considering the roll motion, the number of the control law items increases greatly, resulting in complex control structure and huge calculation. In this article, dynamic surface control (DSC) technology is introduced to reduce the complexity of control law.
The rest of this article is organized as follows: The next section provides some preliminaries and problem formulations. Then, the control design and finite-time stability analysis of formation control are described. In the following, the results of conducted numerical simulations are illustrated. Finally, some conclusions and future works are summarized.
Problems formulation
Preliminaries
Lemma 1
For any real numbers
Lemma 2
For any real variables

Lemma 3
For
Lemma 4
The radial basis function neural network (RBFNN) is used to approximate continuous and unknown smooth function. It can be described as follows 34

where

where

where
Lemma 5
The following systems 35

where
Dynamic model of USV
A 4-DoF USV motion including surge, sway, roll, and yaw is considered. It can be described as 32

where
Remark 1
In the study of ship roll stability, most of the literature decouple the roll motion and other DoFs to simplify the control objectives. The dynamic model studied in this article is the coupling of the roll motion with the surge, sway, and yaw motion, which is close to the reality.
Define
The system (1) can be rewritten as follows

Problems formulation
Figure 1 presents the basic geometric structure about two USVs moving in a leader–follower formation. This position and angle relationship can be extended to multiple USVs. The line-of-sight range ρ and angle λ between the leader and the follower are defined as

where

Leader–follower formation.
Suppose there is a virtual vessel that can maintain the desired formation with the leader in real time. If the follower can track the virtual vessel, the desired formation can be completed. The virtual vessel trajectory is defined as

where
Remark 2
The leader position
Assumption 1
The environmental disturbances
Assumption 2
The states of the desired trajectory
Following the coordinate transformation, 32 we have
Define the desired trajectory as

Define the error system as

Consequently, the path following problem is transformed into the stabilization of error system (3).
Remark 3
Apparently, when meeting
Control design and stability analysis
This section has two tasks to accomplish: One is the path following of followers in the horizontal plane, and the other one is the roll stabilization of USVs. We stabilize the surge and roll error subsystem with a common sliding mode, and stabilize the sway and yaw error subsystems simultaneously with hierarchical sliding mode due to underactuation of the USVs.
Subsystem control design
Step 1. Stabilizing position error
Choose the following Lyapunov candidate

Differentiating V 1, we have

Designing virtual control law as

where k 1 is a positive constant.
Then, the derivatives of Lyapunov function V 1 is negative

Surge velocity error is defined as
To stabilize error ue , a sliding surface is chosen as

where
Remark 4
The PI sliding mode surface can reduce the chattering of the system and also relax some assumptions in Sun et al., 11 such as the existences of first-order derivatives of environmental disturbance and control input.
Differentiating ue , we have

To avoid computational expansion of

where
Remark 5
Due to ud includes roll angle, the amount of calculation will be further increased greatly on the original basis when ud is the derivative. DSC is induced to obtain the derivative of ud without increasing the amount of computation.
Equation (4) can be rewritten as

According to equations (2) and (5), it can obtain the derivative of S 1 as
Employing RBFNN to approximate fu , we have

where
The equivalent control law of the surge error subsystem is designed as

where
Moreover, the saturation function

where
The switch control law of this subsystem is chosen as

where
The switching gain employs a new adaptive law as follows

where
Remark 6
Remark 7
As seen from the proposed adaptive law, the upper and lower bound information of system uncertainty is not required. When
The total control law of surge subsystem can be obtained as

Define Lyapunov candidate function V 2 as follows

where
Based on equations (6 ) to (8), the derivative of V 2 is
where
Designing the adaptive law

As

Using Young’s inequality, we obtain

Utilizing Lemma 2, let

Remark 8
According to Lemma 1, inequality (9) satisfies the theory of finite time stability, that is, the corresponding approximation error variable
Since the upper and lower bounds of ue
are determined by u and ud
, u and ud
are bounded, so ue
is also bounded function. Define
Similarly, we can obtain

Combining

Step 2. Stabilizing position and orientation error
Since subsystem
Choose the following Lyapunov candidate

Differentiating V 3, we have

Designing virtual control law as

where k 2 and k 3 are positive constants.
Then, the derivatives of Lyapunov function V 3 is negative.

Sway and yaw velocity errors are defined as

To stabilize error ve , the first first-order sliding surface is chosen as

where
Differentiating ve , we have

To avoid computational expansion of

where
Equation (11) can be rewritten as

Differentiating

Employing RBFNN to approximate fv and fr , we obtain
where
The equivalent control law of the sway error subsystem is designed as
where
To stabilize error re , the second first-order sliding surface is chosen as

where
Differentiating re , we have

To avoid computational expansion of

where
Equation (13) can be rewritten as

Differentiating

The equivalent control law of the yaw error subsystem is designed as
Defining the second-order sliding mode surface as
where
The switch control law is designed as

where
The switching gain employs a new adaptive law as follows

where
The total control law of the sway and yaw subsystem can be obtained as

Remark 9
For underactuated systems, there is not an independent sway actuator to perform sway motion. Therefore, USV accomplishes the sway motion indirectly through the yaw control. Different from most nonlinear control, this hierarchical controller has the double layer structure. In the first layer, the terminal sliding surfaces are hierarchically designed for the sway subsystem and yaw subsystem, respectively, and in the second layer, the whole sliding surface is designed as the linear combination of terminal sliding surfaces. Therefore, the control input
Differentiating S
2 along with

Define the following Lyapunov candidate function

where
Based on equations (15 ) to (17), the derivative of V 4 can be written as
where
Designing the adaptive law


As

Using Young’s inequality and Lemma 2, we obtain


Similarly, we can obtain

Combining
Step 3. Stabilizing rolling error
Choose the following Lyapunov candidate

Differentiating V 5, we have

Designing virtual control law as

where k 4 is a positive constant.
Then, the derivatives of Lyapunov function V 5 is negative.

Roll velocity error is defined as
To stabilize error pe , a sliding surface is chosen as

where
Differentiating S 3, we have
Employing RBFNN to approximate fp , we have

where
The equivalent control law of the roll error subsystem is designed as

The switch control law of this subsystem is chosen as

where
The total control law of roll subsystem can be obtained as

The switching gain employs a new adaptive law as follows

where
Define the Lyapunov candidate function as follows
Differentiating V 6 along with equations (20 ) to (22), we have
where
Designing the adaptive law

As

Using Young’s inequality and Lemma 2, we obtain

Since the upper and lower bounds of pe
are determined by p and pd
,
Similarly, we can obtain

Combining

Filtering error analysis
Defining filtering error as
Calculating the derivatives of filtering errors separately


where
Based on Young inequality, it holds that

where
Since the desired states of Bj
is bounded according to Assumption 2, there exists a positive constant Mj
such that

Let
Equation (25) can be rewritten as

Based on Lemma 2, we obtain

Defining the Lyapunov candidate function as follows
The derivative of V 7 can be rewritten as

Finite-time stability analysis of formation control
Defining the total Lyapunov function as follows

Differentiating V, we have

Equation (26) can be rewritten as

where


Based on Lemma 3, we can obtain

where
Defining
Case 1: If

From equation (28), one concludes that

Furthermore, the following inequality holds

The settling time can be estimated as

where
Case 2: If
In conclusion, the whole nonlinear error system is semi-global practical finite-time stable.
Simulation
In this section, the experiments of the control system are executed in MATLAB R2014a. Numerical simulations are included to demonstrate the efficiency and effectiveness of the proposed scheme in robustness and transient performance for the USV. Detailed model information of the container ship 32 is given in Table 1 and relevant control parameters are listed in Table 2.
Model parameters of the container ship.

Parameters of control.

Environmental disturbances
The external disturbances acting on USVs are mainly caused by the ocean and the induced wave generated by the adjacent vessels. The P-M wave spectrums are adapted to produce these disturbances, which have been defined as an International Towing Tank Conference standard. One harmonic wave component is now represented by five parameters: wave spectrum
where ka
is the wave number, which equals
Figure 2 shows waves with a significant wave height

Marine environment disturbance with the fifth level sea state.

Coupling marine environment disturbance.
Sørensen 36 has detailed the description and construction of the surge, sway force, yaw, and roll moment and they are omitted in this section.
Formation performance
A group of three USVs in a leader–follower formation is considered. The desired formation configuration is set as:

where the yaw angular velocity rL
of the leader satisfies that
Initial states of follower 1 and follower 2 are given as
Formation trajectories of three USVs are shown in Figure 4. It can be observed that the prescribed formation can be guaranteed and followers are well tracked the leader under the uncertain dynamics and environmental disturbances.
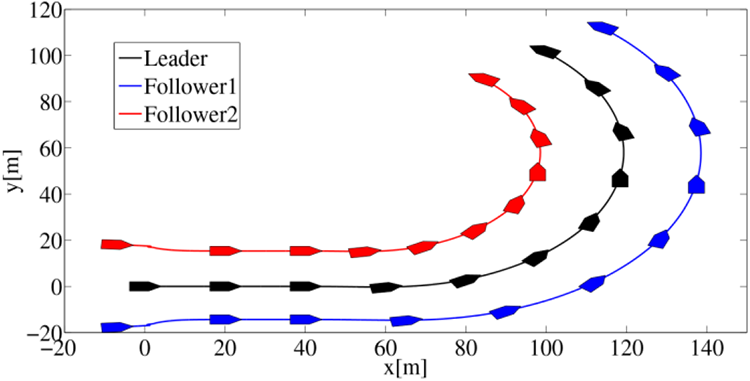
Formation trajectories of three USVs. USVs: underactuated surface vessels.
Formation tracking errors of the followers are shown in Figure 5, where

Tracking errors between the followers and desired position and angle in x,y,ψ, and ϕ.
Figure 6 shows the learning behavior of RBFNNs. It can be observed that the model uncertainties in the surge, sway, yaw, and roll motion are efficiently compensated by the outputs of RBFNNs.
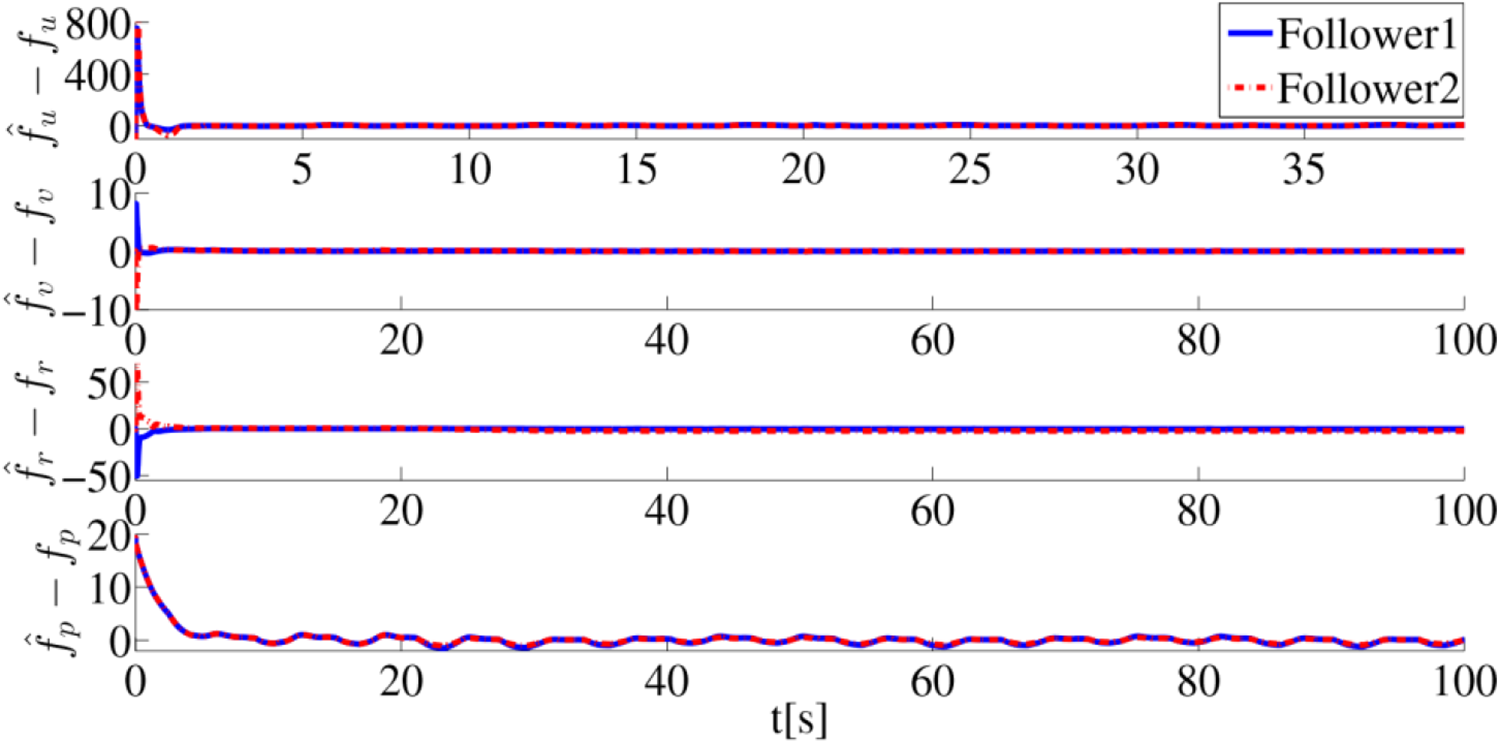
RBFNNs approximate errors of the uncertain dynamics. RBFNNs: Radial basis function neural networks.
To verify the robustness of the proposed controller under systematical parametric uncertainties and environmental disturbances, the dynamic sliding surface is also displayed in Figure 7.

Time evolution of the sliding surface with wave disturbances.
Comparison results
As can be seen from Figure 8, the error of range
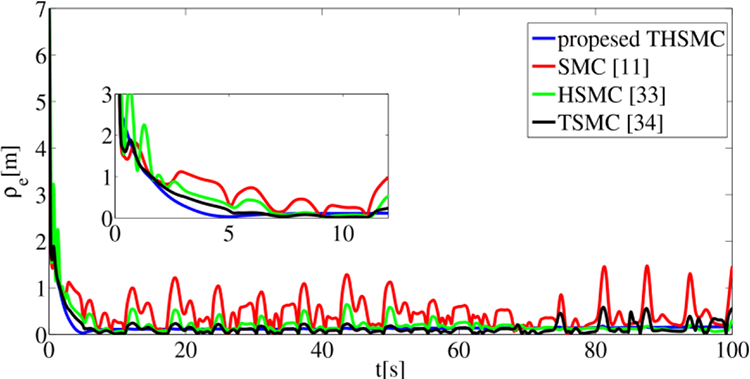
Formation tracking errors of the leader and follower 1 under different control schemes.
Similar to Figure 8, Figure 9 also shows that the proposed method has better performance than SMC, HSMC, and TSMC in formation orientation errors. To further demonstrate the effectiveness of the proposed method, the root mean square values of formation range errors and orientation errors are listed in Table 3. These results confirm the superior control effect of the proposed THSMC scheme.
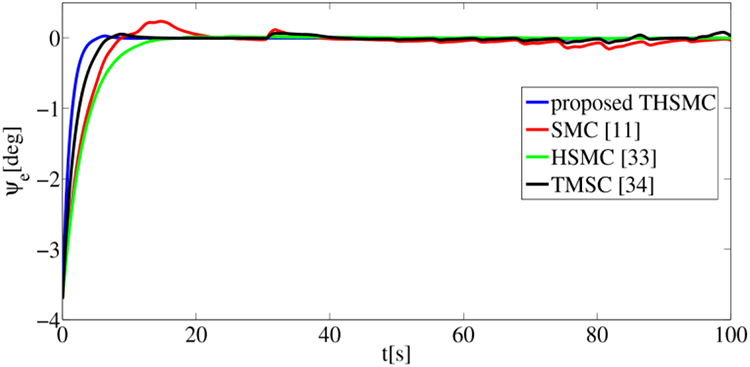
Formation orientation errors of the leader and follower 1 under different control schemes.
RMS values of formation range errors and orientation errors.
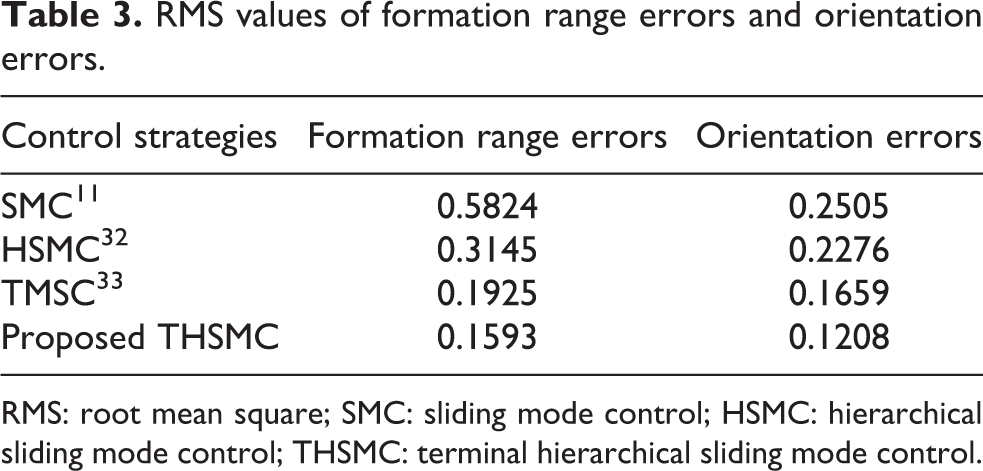
RMS: root mean square; SMC: sliding mode control; HSMC: hierarchical sliding mode control; THSMC: terminal hierarchical sliding mode control.
Conclusion
In this article, a novel control scheme is presented to accomplish the leader–follower close formation control for USVs under the model uncertainties, roll motion, and environmental disturbances. To ensure the formation of USVs within a finite time, THSMC technology is designed and a new switching gain adaptation mechanism is applied to reduce chattering and acquires faster adaptive rate. Furthermore, RBFNN is used to approximate the model parameters which vary with their own state. In the meantime, FTO is employed to quickly and accurately estimate the disturbances from the winds, waves, currents, and the adjacent vessels with zero error. Besides this, the derivative of the virtual control law is more complex than the original one after considering the roll motion. To simplify the control law, the DSC is introduced. Finally, simulations and comparison results show that the proposed method has better formation control effect.
In the future, our work will consider more constraints, such as input saturation, dead zone, actuator faults, and so on. Avoidance among adjacent vessels and obstacles may also be considered in close formation. Besides, since the plant in this article is 4-DoF, it is necessary for rollover prevention to avoid excessive roll motion.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work wass supported by the National Science Fund for Distinguished Young Scholars of China [No. 61525305], the National Natural Science Foundation of China [No. 91648119, No. 61773254, and No. 61673254], the Shanghai Municipal Science and Technology Commission [No. 16JC1400900].