
Abstract
To solve the problem of front wheels being jammed due to the passive trajectory tracking of the conventional car-like robot in the leader–follower formation control, we propose a novel car-like robot with the integration of front-wheel driving and steering. We establish its kinematic model, then analyze its controllability via the method of chained form system, and design the trajectory-tracking controller via the backstepping method. Simulations and experimental results validate our algorithm. This novel car-like robot with the integration of front-wheel driving and steering system not only avoids the jamming in the formation motion, but also owes the advantages of compacter structure, lighter body, and lower energy consumption.
Keywords
Introduction
The problem of controlling formations of multiple mobile robots has drawn a considerable amount of research efforts. 1 There are various techniques available in the literature for the formation control of mobile robots, such as behavior-based approach, 2 virtual structure approach, 3 and leader–follower approach. 4 The leader–follower approach has been the most popular one due to its ease of implementation and analysis. In the leader–follower approach, one robot (the leader) moves along a predefined trajectory, while the rest of the robots (the follower robots) are in a passive situation where they have to keep track of the leader robot and maintain the desired distance and bearing angles.
There are also many types of mobile robot in leader–follower formation control, for example, differential-drive mobile robot, 5 omnidirectional mobile robot, 6 unmanned ground vehicle, 7 and car-like mobile robot. 8 –10 Car-like mobile robot stands out in some environments because of its stability and the ability of heavy load. To our knowledge, the type of car-like robots in leader–follower formation control is mainly the front-wheel steering and rear-wheel driving. 9,10 When considering the problem of accurate trajectory tracking, the conventional car-like mobile robots with front-wheel steering and rear-wheel driving are quite difficult to control. In fact, the front wheels may easily become jammed at steering angles nearly ±90° due to the passive following, causing the tracking failure of the follower robots and distortion of the formation.
The focus of this article is on solving the jamming problem of front wheels, and we change the structure of the conventional car-like robot and propose the formation control of a team of car-like mobile robots with front-wheel driving and steering. In addition, this novel car-like robot with the integration of front-wheel driving and steering system also owes the advantages of more compact structure, smaller body, and lower energy consumption, which make the robots or the formation move through the narrow environment effectively. At the same time, this mode can move on rough terrains with ease and good maneuverability.
Each type of robot has different kinematic models, which affect the result of motion control of a mobile robot and trajectory tracking of follower robots in formation control. The new robot is different from conventional car-like robots, where front wheels are the driving wheels and the steering wheels. From the modeling point of view, the kinematics of the robot should be considered and its controllability needs to be analyzed. Moreover, the robot with front-wheel driving and steering is first applied in leader–follower formation motion, and the trajectory tracking controller must be designed for follower robots to achieve and maintain the formation.
The design of tracking controller for the new car-like robot has been a great challenge. The methods of solving the trajectory tracking problem include the backstepping method, 9,10 the adaptive tracking control, 7,11 and a control algorithm designed for general nonholonomic systems in chained form. 12 –14 The class of nonholonomic system in chained form has been studied as a benchmark example. 13,15 It is well known that many mechanical systems with nonholonomic constraints can be converted to chained form under coordinate change and state feedback. In addition, the backstepping method is a typical nonlinear control approach that can be used to design a controller recursively and handle high-order controllers effectively. The car-like mobile robot is a typical nonlinear system with nonholonomic constraints. Therefore, the new controller based on the chained form system and the backstepping method is designed to achieve the formation in this article.
The article is organized as follows. The “Kinematic models and controllability analysis of the novel robot” section establishes the new geometry of the car-like robot and presents the process of how to verify the controllability of the new car-like robot. The “Trajectory tracking controller design” section describes the trajectory error of follower robots and how the follower robots’ controller is designed using the chained form system and the backstepping method. The section “Results and discussions of the simulations and experiments” provides the simulations and the experimental results.
Kinematic models and controllability analysis of the novel robot
Kinematic model of the conventional car-like robot with front-wheel steering and rear-wheel driving
The geometry of the conventional car-like robot is depicted in Figure 1. M is located at the middle point between the right and left driving wheels, and d is the distance from the rear axle to the front of the mobile robot. The posture of the robot can be
The geometry of the conventional car-like robot with rear-wheel driving.
Based on the work of Chen and Jia, 5 the rear wheel of conventional robot satisfies the conditions of pure rolling and nonslipping. This nonholonomic constraint can be written as follows

From equation (1), the kinematic model of the conventional robot with front-wheel steering and rear-wheel driving is written as
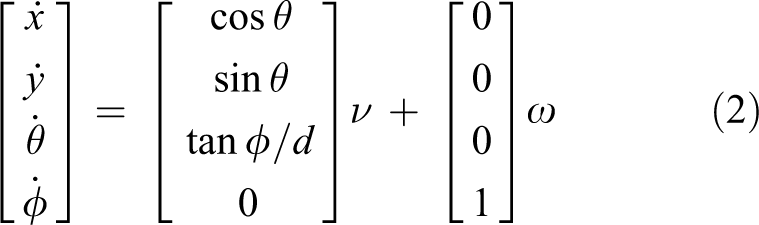
where ν and ω are denoted as the linear velocity and steering velocity inputs of the nonholonomic car-like robot, respectively.
Kinematic model of the novel car-like robot with front-wheel driving and steering
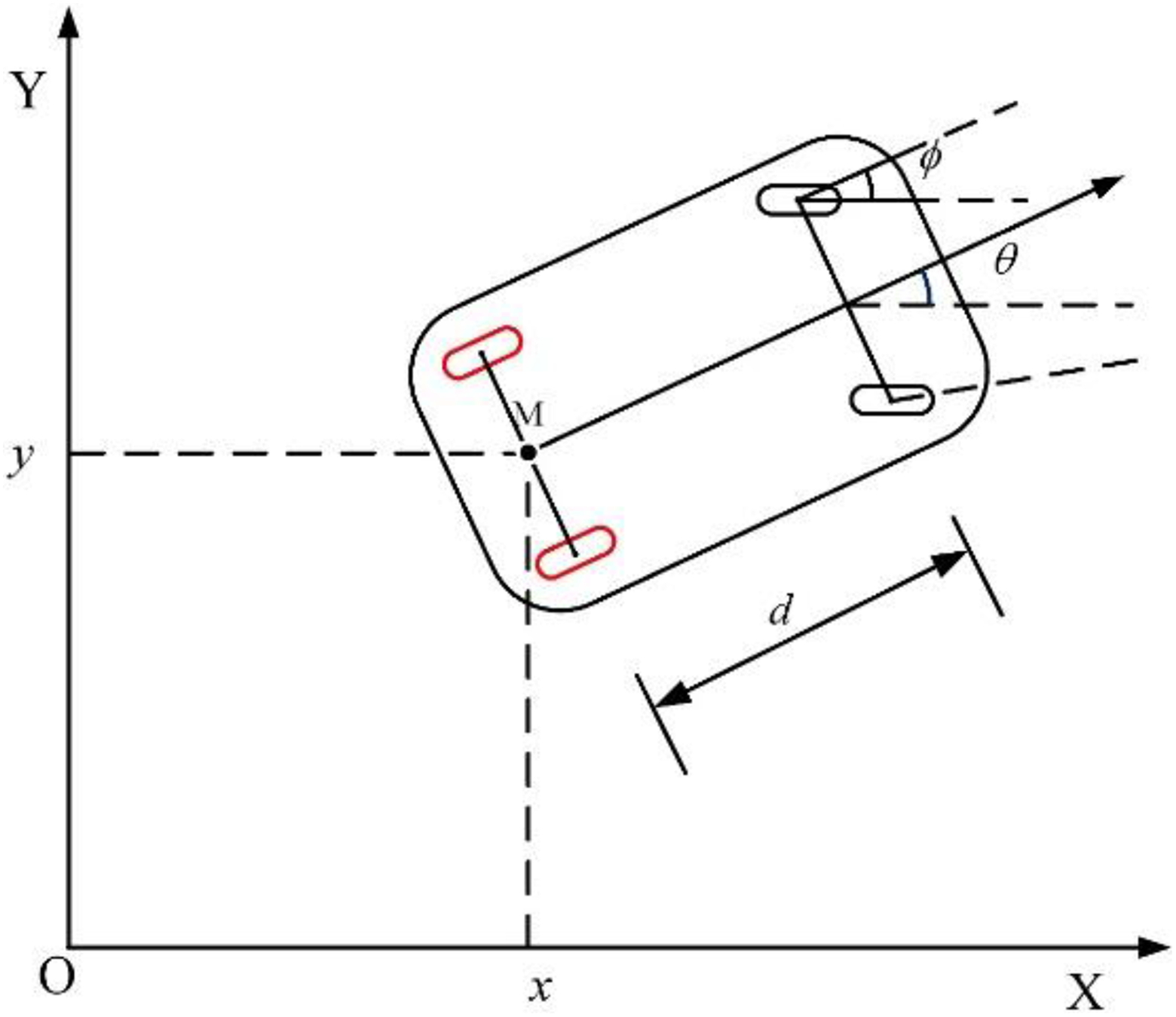
The geometry of the novel car-like robot with front-wheel driving and steering is depicted in Figure 2.

The geometry of the novel car-like robot with front-wheel driving and steering.
The front wheels of the novel robot satisfy the conditions of pure rolling and nonslipping. This nonholonomic constraint can be written as follows

From equation (3), the kinematic model of the robot with front-wheel driving and steering is written as
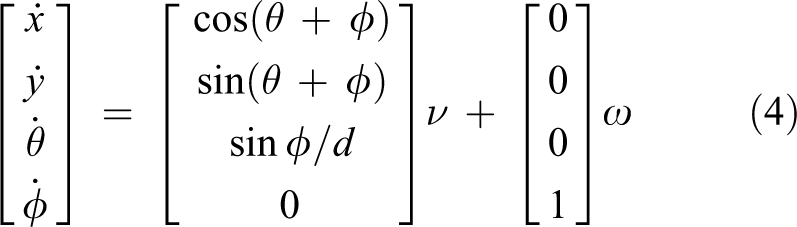
Note that when ϕ is nearly ±90° in equation (2),
Controllability analysis of the novel car-like robot
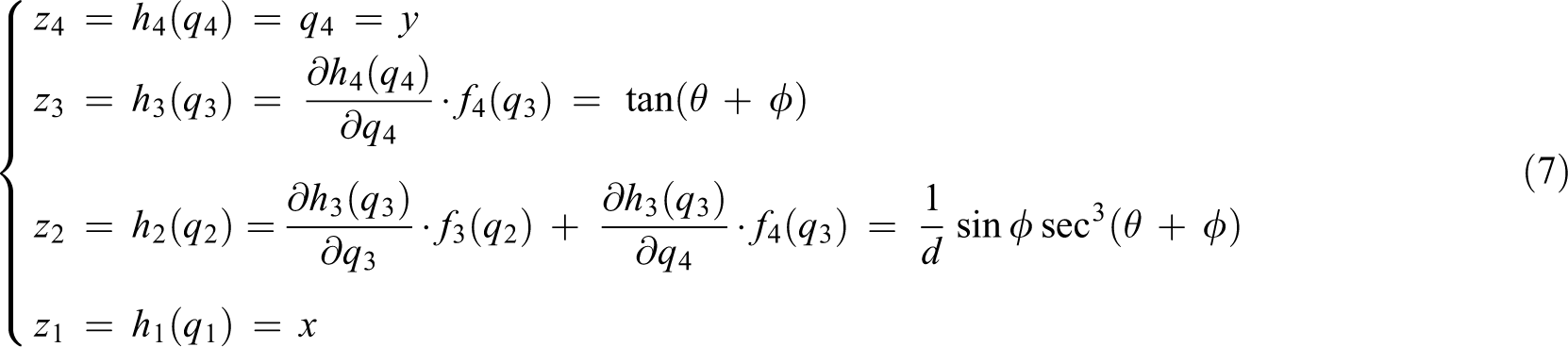
In order to achieve the formation, the new robot in formation should be controllable. Therefore, we must analyze the controllability of the robot. The chained form is a canonical form for a class of nonholonomic systems, and if a system can be transformed into a chained form, it is controllable. 13 However, it is difficult to find a conversion from a kinematic model to the chained form, the paper 14 shows that all the systems with the triangular structure enjoy the convertibility kinematic model. Based on the work of Nakamura et al., 14 we transform equation (4) into a triangular structure as follows

where
Assume that at

Then, at the neighborhood of
and the state feedback is

where

Then, according to the study by Jiang and Nijmeijer, 13 the triangular structure (equation (5)) is transformed into chained form as follows
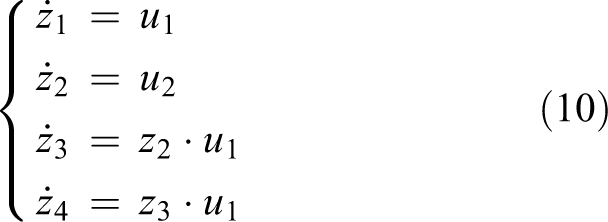
where
Based on the abovementioned transformation, the kinematic model (equation (4)) is converted to a chained form (equation (10)); thus, we have verified that the new car-like robot is controllable, that is, there exists an appropriate controller for it to achieve the formation.
Trajectory tracking controller design
Based on the abovementioned controllability analysis of the new nonholonomic car-like robot, we know that there exists an appropriate controller for these nonholonomic robots to move along the desired trajectory. In this section, we focus on how to design the trajectory-tracking controller for the new robots to form the leader–follower formation. First, we establish the leader–follower formation control framework, and then transform the tracking error model into chained form. Finally, an effective tracking controller for follower robots is designed recursively based on the backstepping method.
The leader–follower formation control framework
Considering a group of n nonholonomic wheeled mobile robots with front-wheel driving and steering, Figure 3(b) shows the tracking model of leader–follower formation. We denote

The leader–follower formation of car-like robots with front-wheel driving and steering.
The follower robot’s desired posture

where
Comparing the follower robot’s desired posture
The transformation of tracking error model in chained form
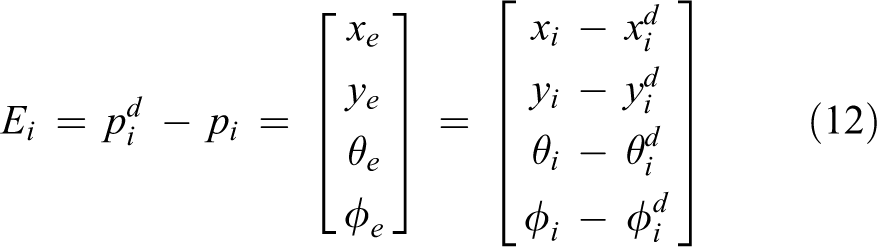
We denote every follower


where
Based on equations (13) and (14), the error differential equations are given as follows

Then, we need to find a Lipschitz continuous time-varying state-feedback controller
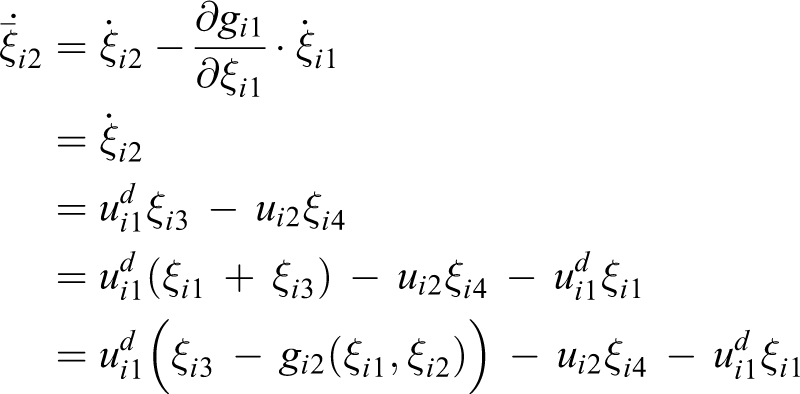
Next, we introduce a change of coordinates and rearrange the system (15) into a triangular-like form so that the integrator backstepping can be applied.
Denote

In the new coordinates

The transformation of tracking error model has been transformed into a triangular-like form, and then we formulate our backstepping design scheme for this new system (17).
Trajectory tracking controller design based on backstepping method
The basic idea for trajectory tracking controller design based on backstepping is a recursive design. 13 The complex system is divided into lower dimension subsystems, then the Lyapunov function and intermediate virtual control inputs are recursively designed for every subsystem. The recursive design proceeds until backstepping has been achieved by the whole system. Finally, the actual control input achieves the original design objective.
Step 1: Based on the study by Jiang and Nijmeijer,
13
start with the

We consider the variable
Set
Observe that
Step 2: Consider the

Thus,

Step 3: Consider
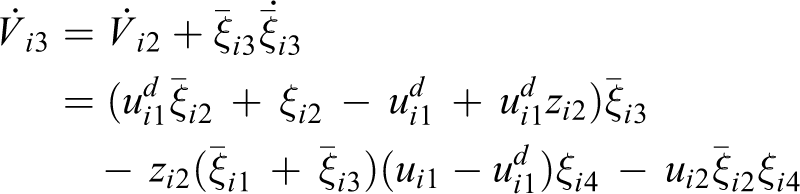
In order to make

where

Step 4: Consider

To make

where

In conclusion, we get the Lipschitz continuous time-varying state-feedback controller, which is in chained form

where





We should change it into the control inputs, based on equations (8) and (23), we get the control inputs

Results and discussions of the simulations and experiments
Simulations of circle trajectory tracking of leader–follower formation
To validate the effectiveness of the proposed tracking controller, we consider three robots forming a typical triangle formation, composed of a leader robot R
L and two follower robots R
1 and R
2 with the desired distances
Figure 4 shows the leader robot performing a circle path which starts from the initial posture at
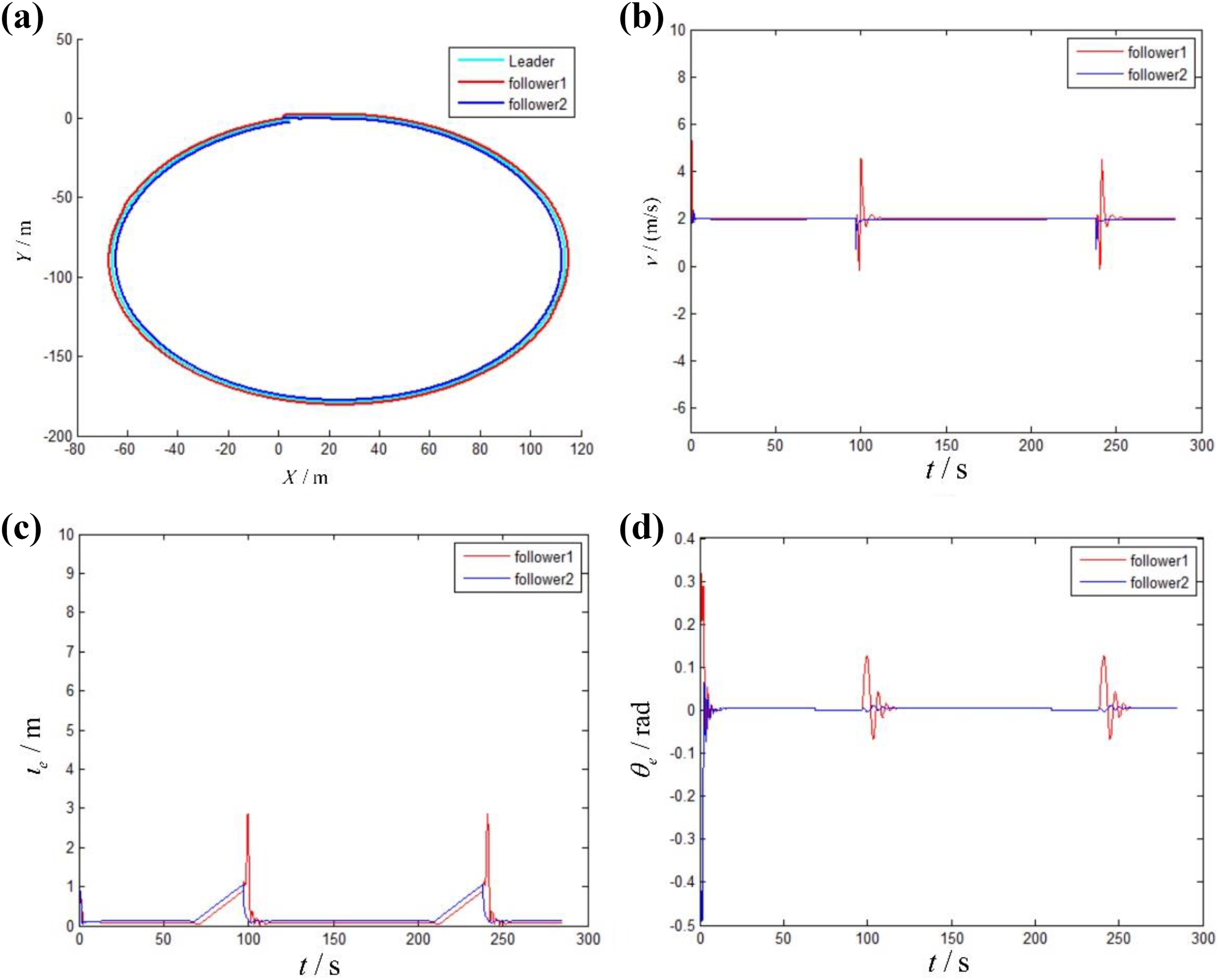
Circle trajectory of the leader robot with two follower robots to realize a triangular formation. (a) Circle trajectory of the formation; (b) linear velocity of follower robots; and (c) and (d) position error and the heading angle error of follower robots, respectively.
The proposed control algorithms make the three robots move to form the formation. When t = 100 s and t = 200 s (in Figure 4(b)), we can see the velocity of follower 1 changes fast, which is caused by the denominator being nearly zero in equation (24). The phenomenon of front-wheel being jammed does not occur during the forming, and follower robots, finally, achieve the triangle-like formation. The trajectory tracking errors of follower robots are shown in Figure 4(c) and (d). We can observe when t = 100 s and t = 200 s, that is, at the quarter of a circle, the front wheels turn 90°, oscillations occur, which is caused by the denominator being nearly zero in equation (24), and the phenomenon of front-wheel being jammed does not occur. After this, the trajectory tracking errors can quickly converge to zero.
Prototype experiments
We made an experiment of circle trajectory tracking of the leader robot with two follower robots to realize a triangular formation. The prototype of the novel car-like robot with front-wheel driving and steering is shown in Figure 5. We show the effectiveness of three front wheel-driving and steering mobile robots with the newly designed controller to demonstrate the formation control performance. The three robots communicate and share data via wireless communication and the robot localizes itself by odometry.

The prototype of the car-like robot with front-wheel driving and steering.
We made an experiment of circle trajectory tracking of leader–follower formation in Figure 6. The leader robot performing a circle path which starts from the initial position at
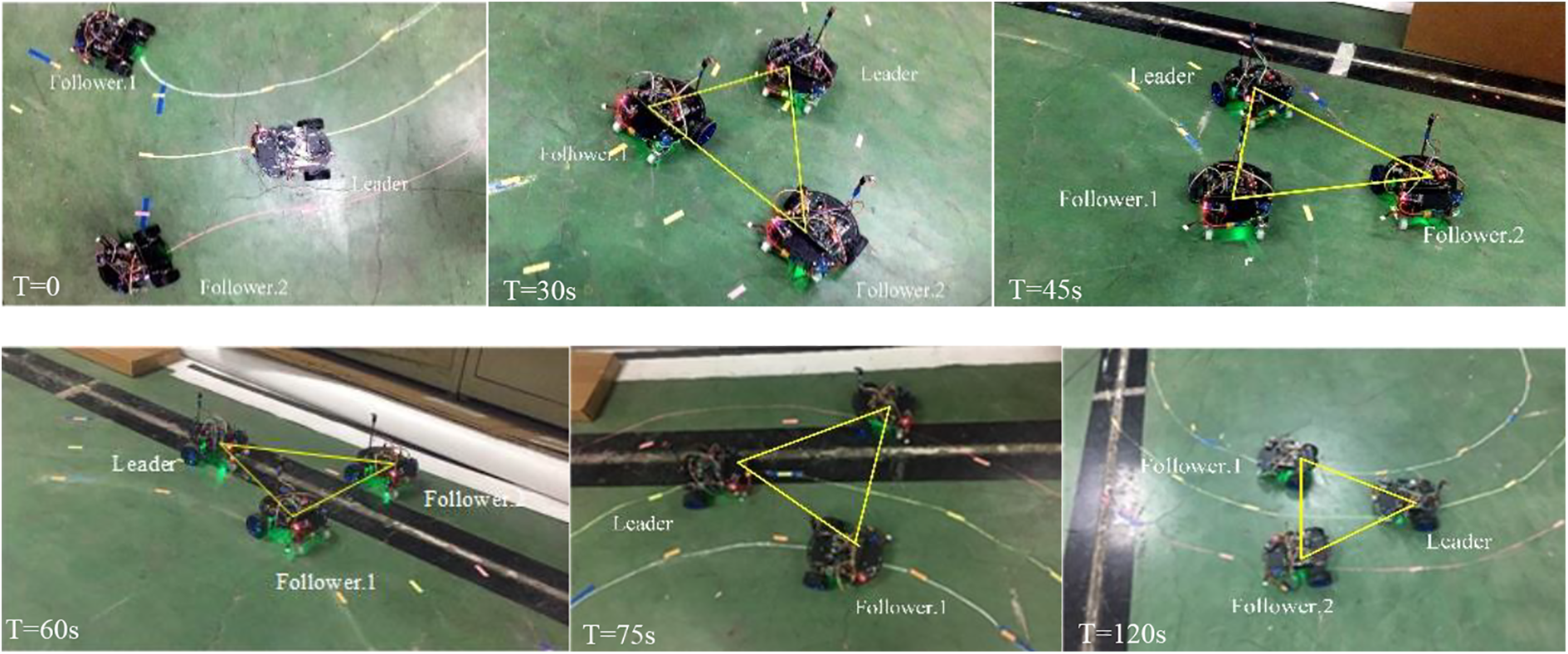
Snapshots of the video about circle trajectory of the leader robot with two follower robots to realize a triangular formation (supplementary video associated with this article can be found in the Online Supplementary Material.)
Experiment data of circle trajectory of the leader robot with two follower robots.

The proposed controller makes the robots move to form and maintain the triangle formation, and when t = 30 s, they nearly form the predefined triangular formation from the initial states. During the forming and maintaining, the phenomenon of jamming does not occur. However, during the moving process, communication appears delays, and sometimes the follower robots receive the wrong data, even receives nothing.
Conclusions
This work aims to solve the problem of the conventional car-like robots, with front wheels steering and rear wheels driving, may be jammed at the front wheels angle nearly 90° during the formation forming. We propose a novel car-like robot with the integration of front-wheel driving and steering and employed it in the leader–follower formation control.
Considering the characteristics of the robot, the new car-like robot has a different kinematic model from the conventional one, we establish its kinematic model and analyze its controllability via the method of chained form system. Based on this, we design the trajectory-tracking controller for the novel robots to form the formation via the backstepping method. Finally, we do the simulations and experiments to validate our algorithm and the phenomenon of jamming does not occur during the formation forming.
This is a complete and constructive work, which contains robot’s driving mode redesign, kinematic model establishment, controllability analysis, and formation controller design. In addition, this novel car-like robot with the integration of front-wheel driving and steering system not only avoids the jamming in the formation motion, but also owes the advantages of compacter structure, lighter body, and lower energy consumption. This work can provide guidelines and references for the design of unmanned ground vehicles and multi-robot formation.
When the new robot performs tasks with requirements of high speed and/or transport of heavy loads, such tasks exert external forces on the robot and will inevitably influence its trajectory tracking. Thus, our kinematic model in this article is not sufficient. Dynamic characteristics of the mobile robot, such as mass and inertia center, need to be considered in our future work. In addition, the communication delay may occur during the multi-robot formation motion, which results in formation distortion or costs more time reforming the formation. To make the formation more effective, the problem of communication delay needs to be solved in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has been supported by the National Natural Science Foundation, China (no. 51775435), and the Programme of Introducing Talents of Discipline to Universities (B13044).
Supplemental material
Supplementary material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.