
Abstract
We address the problem of vertical air–water trans-media control of Hybrid Unmanned Aerial Underwater Vehicles in the presence of parameters uncertainty and disturbances. Hybrid Unmanned Aerial Underwater Vehicle suffers from huge changes of added mass, fluid drag force, and “ground effect” during crossing air–water surface, which easily lead to trans-media failure. A novel structure of Hybrid Unmanned Aerial Underwater Vehicle is built and introduced which adopts dual deck propellers including four air propellers and four water propellers. The dynamic model of trans-media process is developed for the trans-media process in condition that added mass, floatage, and drag force are linearized while linearization errors and “ground effect” are treated as disturbances. Attitude and altitude–depth controllers are designed based on Lyapunov stability theory and adaptive sliding mode dynamical surface control. The proposed controllers accomplish air, underwater, and “seamless” trans-media process integrated control without a priori boundary of disturbances, forcing the tracking errors to an arbitrarily small neighborhood of zero. Simulation results are presented to illustrate the control algorithm with good performance and robustness.
Introduction
Hybrid Unmanned Aerial Underwater Vehicle (HUAUV) is a new concept vehicle which can navigate in the air and underwater and cross the air–water surface repeatedly. These unique capabilities result in a disruptive technology for both civil and military application including air/water search and rescue, inspection, repairs, and survey missions among others as demonstrated in the studies by Yang et al., 1 Alzu’Bi et al., 2 and Kaja et al. 3
In 2005, the US Defense Advanced Research Projects Agency commissioned Lockheed Martin to conduct a study of the Cormorant unmanned aerial vehicle (UAV) which could be launched on submarine and cross the air–water surface. 1 Variable wing was designed for the prototype, and the impact of water entry was tested in the study by Weisshaar. 4 Cormorant UAV could not navigate underwater autonomously and it was recycled depending on remote control which decreased the concealment of submarine. In Gilad et al., 5 a student team at Pennsylvania State University proposed a collapsible helicopter called the Waterspout. The flight stability of Waterspout was difficult to control and it could not navigate in water for lack of underwater power. It totally depended on buoyant force ascenting from released point underwater to the water surface. Gao from Franklin Olin College of Engineering and Techet from the Massachusetts Institute of Technology Department of Mechanical Engineering developed bionic robot flying fish technology. Experimental results showed that it was difficult for the bionic robot flying fish to get out of water because the fluid resistance reduced the velocity of water exit. 6 Drews et al. 7 proposed the concept of HUAUV based on a platform with four underwater propellers and four air propellers as shown in Figure 1. It was imagined that the vehicle could navigate in the air and underwater and cross the air–water surface repeatedly with available structure which attracted the attention of many researchers.

Paulo Drews-Jr’s HUAUV. HUAUV: Hybrid Unmanned Aerial Underwater Vehicle.
The university of Auckland scholars Alzu’Bi et al. 2 and Kaja et al. 3 had developed an air–water hybrid unmanned vehicle as shown in Figure 2. Four propellers were used in both air and underwater media which led to short of power. Depth control system consisted of water depth sensor and variable discharge buoyancy device. During the water exit process, the vehicle firstly floated on the water surface by adjusting depth control system and then took off like seaplane. And during the water entry process, the vehicle landed and floated on the water firstly, then submerged into water by adjusting depth control system. We call the seam mode of trans-media process as “floating first, and then take off.” In Maia et al., 8 Naviator AUV in Figure 3 was developed in Rutgers University (New Brunswick, NJ, USA) and was funded by United States navy. Coaxial design was adopted, and propellers were specially designed to provide enough power in the air and water. Wired communication mode via a cable was employed to transmit control signals. Researchers are considering to design advanced controllers to overcome the shortcoming of “floating first, and then take off” to achieve the seamless trans-media automatically. Compared with underwater unmanned vehicles (UUVs) or UAVs, the environment of HUAUV is more complex in two-phase flow. In Xu et al. 9 and in Qi et al., 10 HUAUV suffered from “ground effect,” the change of added mass and fluid drag force during trans-media process which easily led to trans-media failure.

Loon Copter HUAUV. HUAUV: Hybrid Unmanned Aerial Underwater Vehicle.

Naviator HUAUV. HUAUV: Hybrid Unmanned Aerial Underwater Vehicle.
Some outstanding work had been made to the control issues of HUAUV. Drews et al. 7 established the dynamic model of trans-media process regardless of added mass and external disturbances. And then a proportion differentiation controller was designed to verify the feasibility of the structure. Ranganathan et al. designed a proportion integration differentiation controller for underwater quadrotor which was a meaningful attempt. 11 Neto et al. 12 adopted switching mode to accomplish the trans-media process. The robust controllers were proposed for air and underwater media control. It could not accomplish seamless trans-media process for lack of considering added mass change and floatage change.
The water–air trans-media controllers above are of “floating first, and then take off” mode which are taking a long time to adjust attitude in the water–air surface. The objective of this article is to address the problem of vertical seamless control of HUAUV during water–air trans-media process in the presence of parameters uncertainty and disturbances. Added mass, floatage, and drag force suffered from complex change during trans-media process. Generally speaking, the buoyancy is proportional to the submerged volume, and drag force is proportional to the immersed surface. In our previous work, 13 the added mass of the body of the HUAUV is calculated by computational fluid dynamics during the trans-media process which shows that the added mass could be approximated to linear. Then, those are linearized on the submerged length of the body to simplify the controller design and to decrease the computation burden. Then, the dynamic model of trans-media process in two-phase flow is built in condition that added mass, floatage, and drag force are linearized, while linearization error and “ground effect” are treated as disturbances. Altitude–depth and attitude controllers are designed based on adaptive sliding mode dynamical surface control, and the stability is proved by Lyapunov stability theory. The proposed controllers accomplish air, underwater, and seamless trans-media process integrated control without a priori boundary of disturbances, forcing the tracking errors to an arbitrarily small neighborhood of zero. Simulation results are presented to illustrate the control algorithm with good performance and robustness.
The process of trans-media
The designed HUAUV with four air propellers and four underwater propellers installed on the paddle arms is shown in Figure 4. A novel structure where air propellers and underwater propellers are separated and connected by columns whose length can be adjusted for automatic control is built. Low-frequency wireless communication mode is employed. The compressive cabin in the middle of the vehicle is not only used to protect the internal electronic components but also provides a major part of the floatage. Density of the vehicle is slightly bigger than that of water. Dimension of the vehicle is finalized as 178 × 124 × 55 mm3. Based on the symmetrical design of body structure and reasonable arrangement of internal components, the center of gravity is made to coincide with the center of buoyancy.

HUAUV. HUAUV: Hybrid Unmanned Aerial Underwater Vehicle.
The process of water entry of the HUAUV is shown in Figure 5 and the process of water exit is shown in Figure 6. During water entry, four air propellers provide power to decrease the altitude of the vehicle. Once the vehicle contacts with water surface, the four underwater propellers are started to provide power and the four air propellers are gradually shut off to make the vehicle downward. During water exit, four underwater propellers provide power alone until the vehicle contacts the water surface, and then four air propellers are started to pull the HUAUV out of water. The time of this vehicle’s transition is related to the length of columns that can be adjusted for automatic control.

Water entry of the vehicle.

Water exit of the vehicle.
In the process of trans-media, it is dangerous for high-speed rotation air propellers to hit the water or high-speed rotation underwater propellers to stick out of water which cause the imbalance of power and make trans-media failure. However, the vehicle suffers from “ground effect” alone with external disturbances and the tail-wagging propellers will stir the air into water to form bubbles which collapse to cause the vehicle shaking, as described in the study by Qi et al.
10
We define ϑlim as a limitation for pitch angle and yaw angle to keep paddle arms for air propellers in the air away from hitting water surface and guarantee paddle arms for underwater propellers in the water during the trans-media process. If pitch angle or yaw angle exceeds the limitation, the paddle arms for air or underwater propellers would hit the water–air surface leading to trans-media failure. Considering at limit position where paddle arms do not let air or underwater propellers hit the water surface as shown in Figure 7, the maximum angle ϑlim can be expressed as
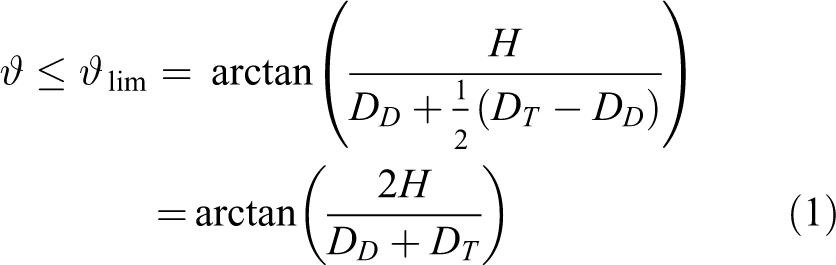

Maximum angle in the trans-media process.
where H is the height of the HUAUV. DT is the length of the paddle arm for air propellers and DD is the length of the paddle arm for underwater propellers.
Dynamic model of trans-media process
As shown in Figure 8, four sets of power units at top view are arranged by “X” type through which the attitude and position of the vehicle can be adjusted. Let Oxyz be inertial coordinate frame and

Body-fixed frame and inertial frame.
Based on Euler’s theorem in the studies by Mei 15 and Xu and Ozguner, 16 dynamic model for trans-media process is developed considering HUAUV as a rigid body. The dynamic model can be expressed as

where
In this article, floatage, added mass, and drag force are linearized, and linearization errors and the effect of the collapse of bubbles are regarded as disturbances. The linearized portion of the floatage is directly proportional to the submerged volume of the vehicle

where f(z) denotes linearized portion of the floatage, m0 denotes mass of the vehicle, H for height of the vehicle, and z for the altitude from the center of mass to water–air surface in the earth-fixed frame.
The drag force of the aircraft in the air is small and negligible. In the instant access to the water, the drag coefficient increases rapidly. Linearized drag coefficient during trans-media process can be expressed as

where
The linear portion of added mass is proportional to the depth of penetration into water. And then the total mass including the mass of the vehicle and the added mass could be expressed as

where
The linearized added moment of inertia can be expressed as

where
Substituting equations (3) –(6) into equation (2), the dynamic model for trans-media process can be expressed as

where
Controller design
This section proposes an adaptive sliding mode dynamical surface control law to design attitude controller and altitude–depth controller. The proposed controllers can accomplish air, underwater, and seamless trans-media process integrated control in the process of vertical air–water trans-media. The block diagram of control scheme is illustrated in Figure 9.

The block diagram of the control scheme.
Attitude controller
The tracking error of attitude is defined as

Taking derivative of equation (8) twice and substituting it into equation (7b), we obtain

Take dynamic surface as

where λ1 is a positive constant to be designed later.
The control input for attitude is designed as

where c1 is a positive constant to be designed later.
Taking the derivative of equation (10) and then substituting the upper formula of equation (11) into it, we obtain

Substitute the lower formula of equation (11) into equation (12)

Adaptive laws of external disturbance torque and change of system parameters are designed as

where γ1 and γ2 are positive constants to be designed.
We start by defining the candidate Lyapunov function as

where
Take derivative of equation (15)

Because the velocity of the vehicle during trans-media process is slow and we have no prior knowledge on the system parameters change and external disturbance, then it is reasonable to assume

Substituting equations (13) and (17) into equation (16), we obtain

For unit vector

Because

Substitute equations (14), (19), and (20) into equation (18)

It indicates that V1 is bounded which implies
Altitude–depth controller design
Position errors in horizontal plane have little influence on successful trans-media, so the article focuses on altitude–depth controller design. Define altitude–depth error function of sliding mode surface as

where
Take

where
Disturbances in altitude–depth direction are expressed as

where ρ is the unknown disturbances and
Adaptive laws for mass and disturbance are designed as

Take candidate Lyapunov function as

where
Take derivative of equation (26) and substitute equations (22) to (25) into it

It indicates that V2 is bounded which implies
The advantage of sliding mode control is that it can overcome the uncertainty of the system and has strong robustness to disturbances and un-modeled dynamics. But sliding mode control has the problem of chattering in control input due to the use of switching function. 18 In order to eliminate the chattering in U1, switching function is replaced by saturation

where β is the boundary layer thickness of saturation function which is designed later.
Simulation and discussion
In this section, simulations are carried out to illustrate the performance of the proposed controller in the presence of parameters uncertainty and disturbances. Parameters of the HUAUV can be found in Appendix Tables 1A and 1B. In all of the following simulations, the original position of the vehicle is

Disturbances are considered and described as:

Tracking of fixed depth
Reference signal of fixed depth is set to be −2 m underwater, and reference signals for pitch and yaw angle are set to be zero to prevent as much as possible the air and underwater propellers hitting the water–air surface. Simulation results are shown in Figures 10 to 12.

Tracking error of altitude–depth.

Tracking error of attitude angle.

System control input.
Figures 10 and 11 illustrate that the designed controller can accomplish fixed-depth tracking, forcing the altitude–depth and attitude tracking errors exponentially decay to an arbitrarily small neighborhood of zero. As shown in Figure 12, the control input is smooth indicating that the saturation function can eliminate the chattering of control input U1.
Tracking of sinusoidal command in repeated trans-media process
The desired sinusoidal command is set to be
As shown in Figures 13 and 14, the simulated HUAUV has crossed the air–water surface four times at 1.50 s, 4.71 s, 7.89 s, and 10.98 s. The pitch angle and the yaw angle at the time of crossing are shown in Table 1 which are smaller enough than the critical value ϑlim to guarantee successful trans-media. In Figure 12, the tracking error of altitude in the air is smaller than 0.01 m, while the tracking error of depth in descent stage of underwater increases gradually to 0.05 m. In ascent stage, the tracking error of depth decreases gradually to 0.01 m. The reason that tracking error in the descent stage of underwater is much bigger than that of ascent stage is that the HUAUV is not able to provide a sufficiently large force along the negative Z-axis. Simulation results demonstrate that the proposed controller can accurately track the specified sinusoidal altitude–depth command in the presence of parameter uncertainty and disturbances, guaranteeing exponential convergence of tracking errors.

Tracking of altitude–depth.

Tracking of attitude angle.
Attitude angle for the four-time trans-media process.

Estimation of external disturbances and system parameters are shown in Figures 15 and 16. The designed controller cannot guarantee the asymptotic property of the parameter estimation which has little influence on successful trans-media process, but can guarantee the boundedness of the estimated parameters. System control input in Figure 17 indicates that the saturation function can eliminate the chattering of control input U1.

Estimation of disturbances.

Estimation of system parameters.

System control input.
Conclusions
The problem of seamless vertical water–air trans-media in the presence of parameters uncertainty and disturbances has been addressed. Primary objective of the controller design is to converge the tracking errors to an arbitrarily small neighborhood of zero which guarantees successful air–water trans-media. By means of a cascaded approach, an attitude controller and an altitude–depth controller are developed based on adaptive sliding mode dynamic surface control method and Lyapunov stability theory. The resulting control law guarantees global exponential stability of the tracking errors. In order to demonstrate the practicability of the proposed controller, tracking commands of a constant point and a sinusoidal motion is simulated to show that the proposed control scheme is effective. A further research would be focused on hardware selection and design to achieve automatic control with experiment.
Supplementary material
Supplemental Material, Experimental_vidio_02 - Research on vertical air–water trans-media control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical surface control
Supplemental Material, Experimental_vidio_02 for Research on vertical air–water trans-media control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical surface control by Zongcheng Ma, Jinfu Feng and Jian Yang in International Journal of Advanced Robotic Systems
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (No. 51779263).
Supplementary material
Supplementary material for this article is available online.
Appendix A
Added mass for the HUAUV.

| λ 11 | λ 22 | λ 33 | λ 44 | λ 55 | λ 66 |
|---|---|---|---|---|---|
| 1.5275 | 1.5048 | 1.3842 | 0.0411 | 0.0359 | 0.0452 |
HUAUV: Hybrid Unmanned Aerial Underwater Vehicle.