In this paper, an adaptive sliding mode disturbance observer is designed to counteract the disturbance actively. By designing the adaptive laws, the assumptions on the disturbance are relaxed in the proposed observer, its first derivative upper bound is considered to be unknown. Based on the proposed disturbance observer, an output feedback sliding mode controller is constructed for the continuous-time linear systems with unknown external disturbance. The proposed controller incorporates only the system output information and has less chattering of the control input. The feasibility of the proposed strategy is shown by numerical simulations.
Sliding mode control (SMC) has attracted the attention of many researchers because of its robustness to disturbances and design simplicity.1–4 In the area of SMC systems, many of the theoretical developments assume that the system state vector is available.5–7 In most practical situations, it is unrealistic or prohibitively expensive to measure the full state information, and only the output information can be physically measured.8–10 Generally, there are static and dynamic output feedback SMC strategies to work around this limitation.11 The static output feedback SMC design problem is studied for a delay system.12 Song et al.13 address the static output-feedback sliding mode control (SMC) problem for a class of uncertain control systems. In order to improve the control performance of static output feedback SMC, the dynamic output feedback SMC can be designed with a compensator. The additional integral term is introduced in the sliding surface, which can provide one more degree of freedom.14 An asynchronous output feedback sliding controller is proposed for a class of Markovian jump systems.15 In the aforementioned results for output feedback SMC, the disturbance rejection problem is ignored, which leads to the chattering phenomenon in the system.
Recently, the observer-based method is utilized to eliminate disturbance and reduce chattering.16,17 Su et al.18 present a disturbance observer where the bounds on disturbance derivative are assumed to be known. A new form of the combined observer-controller is designed to provide estimated data of unknown disturbance and unmeasured states in the control law.19 Lee20 proposed a composite control technique by combining a nonlinear disturbance observer. A fixed-time observer has been put forward, which possessed a better approximation to external disturbances.21 However, in the above works the disturbance observer was considered with the assumption of the known maximum upper bound of disturbance. In some practical applications, it is difficult to acquire the disturbance upper bound directly, especially combined with the sliding mode algorithm, too large upper bound will aggravate the chattering phenomenon of the system, and too small upper bound will lead to the instability of the system.
The sliding mode disturbance observer with adaptive control is proposed to relax the restriction on disturbance. The adaptive control is introduced in the sliding mode disturbance observer that use the adaptive method to ensure the control gain is as small as possible whereas sufficient to eliminate the disturbances or uncertainties.22 Negrete-Chávez and Moreno23 develop an adaptive second-order SMC to interference disturbances. An adaptive scheme based on equivalent control is presented and it requires the disturbances upper-bound is known.24 Adaptive SMC methodology is structured which does not require a priori bounded uncertainty.25,26 In order to further improve the observation performance of the observer, finite-time control methods were studied.27 Finite-time convergence of the disturbance approximation error is guaranteed using the designed disturbance observer.28 Compared with asymptotic convergence,29 finite-time convergence can track the true value of the disturbance faster. The following three problems are interesting but challenging in this paper, (1) How to reduce the chattering of the output feedback controller, (2) how to design the disturbance observers with adaptive control to relax the constraints on disturbances, and (3) how to achieve finite-time convergence in the proposed observer.
The above-mentioned issue motivated us to devise a new output feedback sliding mode control based on the adaptive sliding mode disturbance observer strategy. Initially, the dynamic sliding surface for parameters analytically is designed, and an additional integral term is introduced in the sliding surface, which can provide one more degree of freedom. Based on the dynamic sliding mode surface, an output feedback controller is organized with power terms. It is worth mentioning that, the controller only contains the output information of the system and improves the convergence speed of the system state. In order to attenuate chattering in the control input, a novel ASMDO is developed. The proposed ASMDO does not require information about the bound on the disturbances and their derivatives. Compared to some existing observers, the conditions on disturbance bounds are relaxed. The effectiveness of the proposed control approaches is illustrated by an inverted pendulum on a cart model.
Preliminaries
Consider the following linear system with matched external disturbance
where is the state vector, is the control input, is the output vector, and . is the unknown disturbance. , , are given constant matrices.
When matched uncertainty alone is present, it is sufficient to consider the nominal linear system representation when designing the switching function. The sliding motion depends on the choice of the sliding surface, the precise effect is not readily apparent. Therefore, we need to transform the system into a suitable regular form.
Assume , thus, there exists a non-singular matrix such that8: , . Partition as follows
where and .
Under the coordinate transformation , system (1) is transformed into the following regular form
where and Let substituting and into (2) and (3), then system (1) is further written as
Proposed method
Design of dynamic sliding surface
The dynamic sliding surface is designed as
An additional integral term is introduced in the sliding surface, which can provide one more degree of freedom. is defined as follows
and are the sliding surface parameter matrices, is a known matrix. The derivative with respect to (8)
then (7) can be rewritten as
According to (10), we have
Substituting (11) into (4) yields the sliding motion equation
Define and , (9) can be rewritten into the following form
Thus, the new sliding motion is as follows
where and .
Proposition 1.Defineand, andwill be introduced later. The new sliding motion is asymptotically stable on the dynamic sliding surface, if there exist, are symmetric positive definite matrices and subject to
Proof. Define and are nonsingular matrices, and satisfies Coordinate transformation matrices and are designed as follows
where is identity matrix. Hence, we have Define Applying Schur complement on (16) obtain , then
hence exist a positive definite symmetric matrix such that
The new sliding motion (14) is asymptotically stable. ■
Design of sliding mode controller
In this subsection, the control method based on output feedback sliding mode with power term is proposed.
Define the generalized inverse matrix of is and satisfying that , generalized inverse matrix of is , then equation holds. Since is Hurwitz matrix, then exist and subject to
Denote as the largest positive scalar such that (17) is feasible. Utilize Cholesky factorization for to get .
Remark 1.Inequality (17) holds which can be explained as follows:
Consider the Lyapunov function for the new sliding motion (14):
Sinceis Hurwitz matrix and, hence, . There existsforholds.
Proposition 2.Definethen the following output feedback sliding mode controller is proposed:
whereandcan be obtained through, coefficientand. is the estimation of the disturbance. Then, the system (2)−(3) can reach the sliding surface.
Proof. The first derivative of the sliding mode surface is given as
In order to prove that can converge to 0, define the Lyapunov function , its derivative can be determined and substitute (19) into as
Substituting (18) into (20), one obtains
where Obviously, , and assume holds. In order to ensure that holds, we need to discuss the positive and negative of .
Substituting (10) into (4) and (9) yields . Define new Lyapunov function , and derivative of as follows
Substituting and (17) into (22), then
Define and as the initial value of . Combining with (23), we have
Integrating the formula (24) yields Combining one obtains Substitute and into the equation , then
Hence Combining with one obtains
Since and are known, then
In the following, both the cases and will be discussed.
If , since at , thus and . Assume , there exists such that in and in . When , then
which indicates that, if we have and thus there always exists such that ,
Define . If , then . According to the definition , thus and substitute the formula into to obtain
Since , hence (21) can be written as
which shows that will converge to origin.
If , obviously , thus . The inequality (29) can be determined immediately, and the desired result can be obtained.
When , since , hence , then (29) is also satisfied.
This implies that if is guaranteed, then will converge to zero and the system can reach the sliding surface. ■
Lemma 1. (Zuo and Lin, 2016)3Consider the following scalar system
whereare positive constants,
and. The equilibrium point of the above system is finite time stable and its settling time is bounded.
Design sliding mode disturbance observer
In this section, the sliding mode disturbance observer is designed to guarantee converge to zero.
The following auxiliary variable is introduced
where
The coefficients are positive constants with . will be introduced later.
Proposition 3.Consider the following sliding surface
If satisfies the following equation
whereis a positive constant., and. andare disturbance and its derivatives, andare the upper bounds ofand, respectively.converges to origin in finite time and the estimation of the disturbance as follows
Proof. Consider the derivative of in equation (32) as follows
Consider the Lyapunov function , then derivative is as follows
Since is a positive constant and , then (40) can be written as follows
The will converges to zero in finite time, by utilizing equation (34) one gets
By considering Lemma 1, the equilibrium of (42) as is finite time stable.
Consider the estimation error of disturbance as follows
Both (36) and (38) are satisfied, will convergence to origin in finite time.
This implies that if is satisfied, the proposed disturbance observer can estimate the disturbance in finite time.
Design adaptation structure
In this subsection, two adaptation structures are designed, and the assumptions on the disturbance are relaxed in the proposed observer. As is capable of seeing from the proof in the above subsection, the adaptive gain must satisfy to ensure the system sliding takes place, in which case reachability condition is achieved30 and sliding motion takes place on . In other words, unknown disturbance or uncertainty should be completely eliminated, that is
In the first adaptive structure, similar to general adaptive control,24 it is assumed that is known and is unknown. The second adaptive strategy is designed which assumes that both and are unknown, the assumptions on the disturbance are more relaxed.
Consider utilizing a low pass filter to filter the switching signal to obtain a close approximation. Here, the should take on the average value. Then if satisfies
where is a time constant, then almost completely approximates . In order to eliminate the influence of the initial conditions of the filter, assume exist and such that
holds. The adaptive algorithm of the control gain is driven by using the equivalent control. Through the following inequality, we introduce the concept of ’safety margin’
where and are design parameters such that
holds. Define error variable as follows
which shows that if , then , that is, the system will maintain sliding motion. Define adaptive scheme
where is auxiliary scalar, it has the following form
where is a positive scalar and is elaborated later. In this paper, according to whether is known, will execute different choices. In the next work, we will discuss two situations: is known and is unknown.
Case 1:
Assuming is known but is unknown. Define
where , and is designed to ensure .
Proposition 4.As described above, the problem of maintaining sliding is converted to how to yieldin finite time; how to allowandto be bounded. In the following, we will verify the situation whenis known.
Proof. Consider following Lyapunov function
It follows from (53) that
The derivative with respect to (53) and integrate with (54) and (55), one obtains
Define to be the initial value of and to be the time taken for converge to zero, and hence integrating both sides yields , which shows that and will converge to origin in finite time. Then will be guaranteed and the reachability condition is satisfied. Obviously is bounded, hence and is bounded.
Case 2:
Assuming that both and are unknown. Define
where is a design constant which to eliminate the noise signal in the system.
Proposition 5.Bothandare unknown, ifis chosen to satisfy
thenis realized in finite time and the sliding motion is guaranteed.
Proof. Consider the Lyapunov function from (53)
Suppose , from (57) one obtains , then holds. Since , then is satisfied. In (57), if with (55), is established, (56) can be rewritten as
If with then Since then outside of the interval and in the solution domain subject to . Draw the smallest ellipse with the origin as the center to enclose the , then where represents the ’radius’ of the ellipse, and Choose the appropriate to satisfy (58), the sliding motion will is guaranteed.
Since and outside of in the solution domain, holds, hence is an invariant set. If the enters , then will not be able to leave and from (58), is satisfied. If the does not enter , then from the above discussion and are satisfied. Since is bounded, then and are bounded, hence is uniformly continuous, that is, when . It shows that there exists such that for . Hence, has always been established in finite time.
Since the holds, therefore from (48), that is , and from (47), one obtains
Hence reachability condition is satisfied and the system will maintain sliding motion. Since and are bounded, consequently and remains bounded. From (45)
obviously is bounded, and the proof is complete.
Remark 2.The method proposed in this paper can be improved by some new fuzzy systems, at the same time, the ASMDO does not require knowledge of the disturbance and its first derivative, hence it can better estimate the disturbances in these systems.31,32
Remark 3.The control strategy of this paper can be used to deal with the problem of energy/voltage management in photovoltaic (PV)/battery systems33and interval type-3 fuzzy logic systems.34The sliding mode disturbance observer can be used to eliminate the influence of the variation of temperature, radiation, and output load on the system, and effectively guarantee better disturbance rejection performance of the controller.
Simulation example
A practical example is provided in this section to illustrate the efficiency of the obtained result. Consider an inverted pendulum on a cart model given in Edwards and Spurgeon8 and the linearization model is as follows
The non-singular matrix can be found as
then we can obtain the following transformed regular form
Choose and as follows
Use the LMI toolbox to obtain these parameter matrices
The controller (18) parameters are selected as , , , , , , . The initial condition is . This system is simulated with disturbance: . The parameters of the sliding mode disturbance observer are selected as . The disturbance is set to . The parameters of adaptive schemes are chosen as , , , , , , and starting with zero initial conditions.
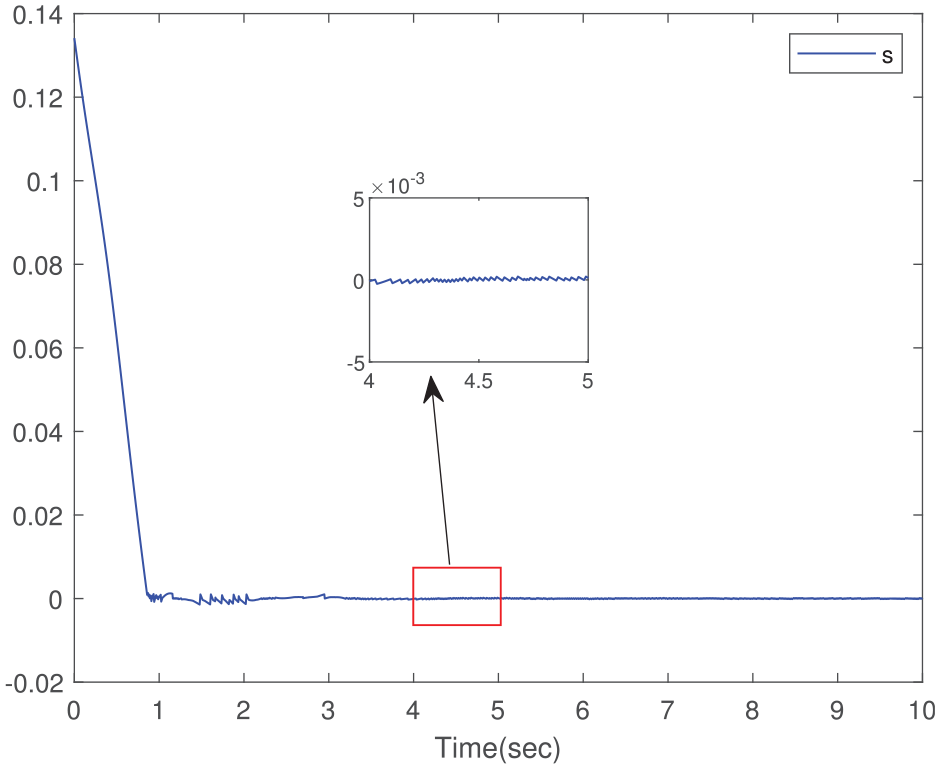
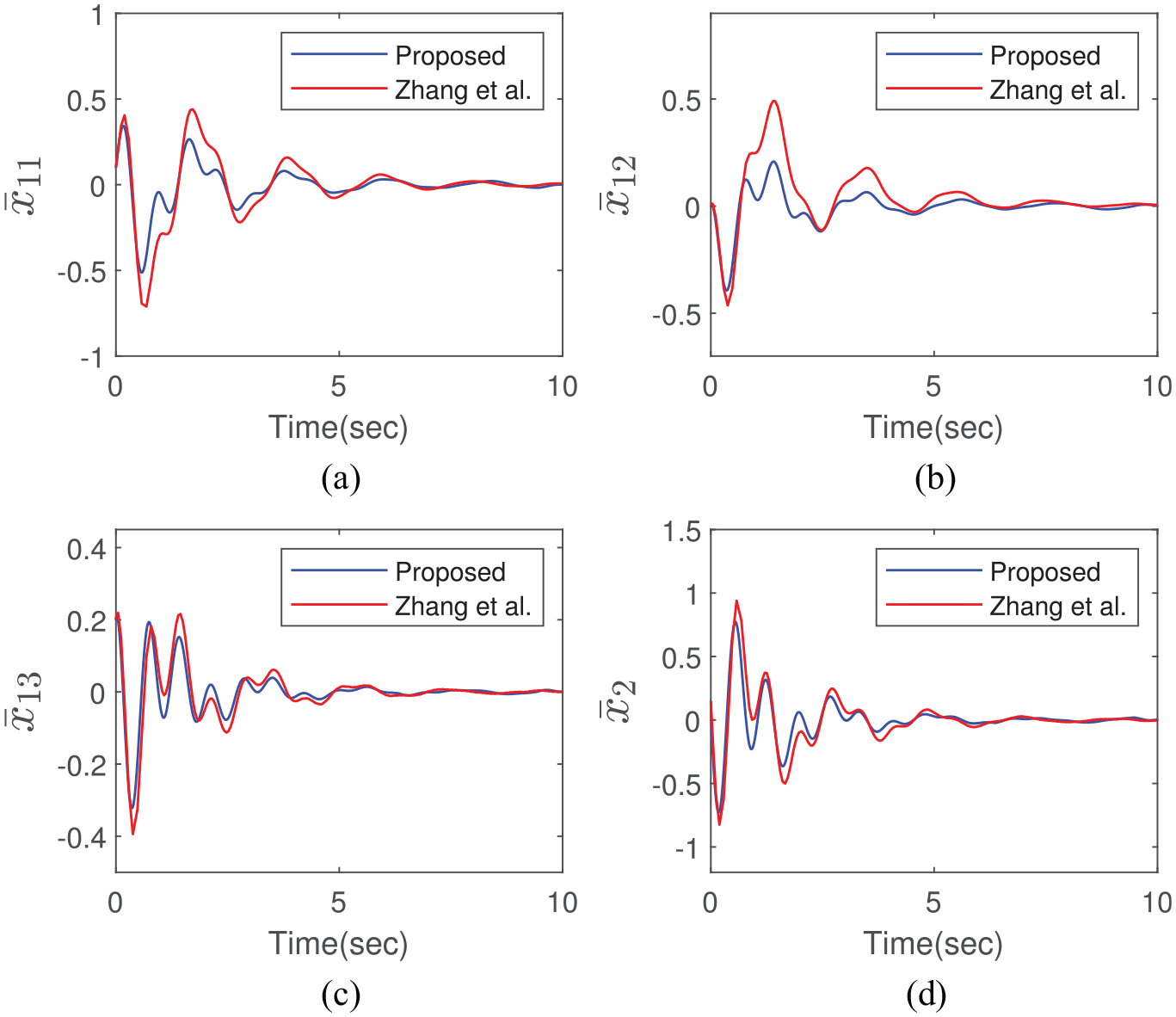
Figures 1 and 2 are the control input of the system obtained from Zhang et al.11 and (18), respectively. Obviously, the proposed controller possesses less chattering. The fluctuation of the control input from 0 to 6 s is caused by the system states and in the controller (18). It can be seen from Figure 4 that when the system state tends to be stable, the input of the controller will also tend to stable. The fluctuation of control input after 6 s is caused by in the controller (18). Figure 3 shows that after the sliding surface converges to , there is a slight fluctuation around zero, which causes the in the controller to switch between −1 and 1, thus generating the fluctuations in Figure 2. Figure 4 depicts that system state by Zhang et al.11 and (18), respectively. Obviously, the system states obtained with the proposed controller have less overshoot and faster convergence performance. The coefficient of additional term located in denominator, although the item is omitted in , actually, it must enable the system to converge faster.
Comparisons of system states: (a and b) are “position” signals, (c and d) are “velocity” signals.
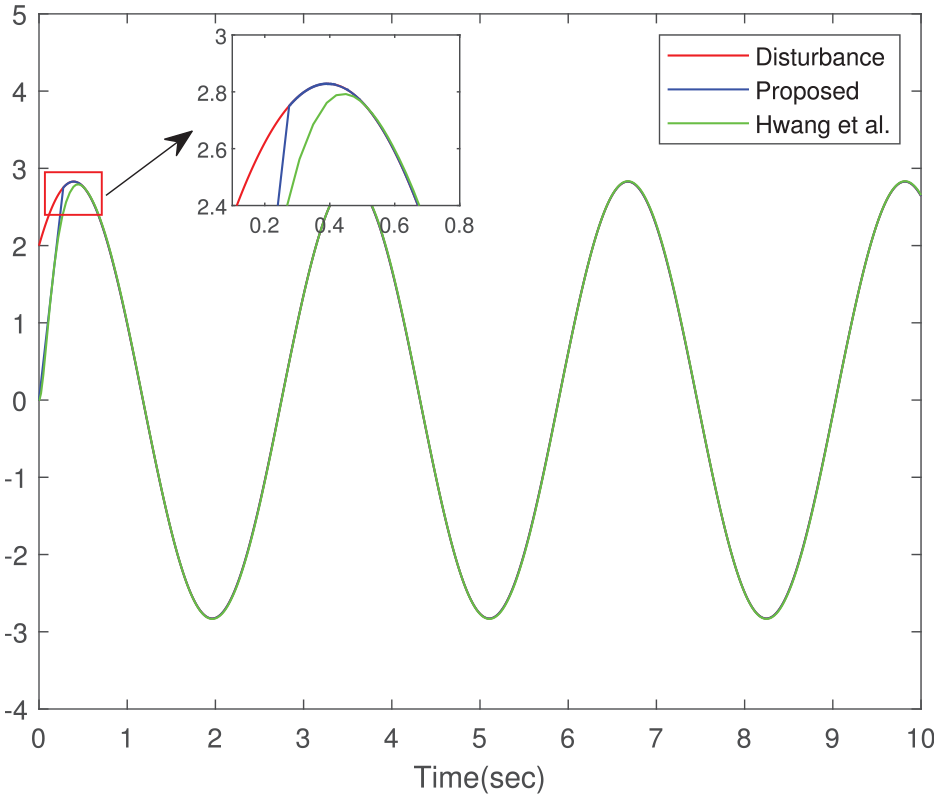
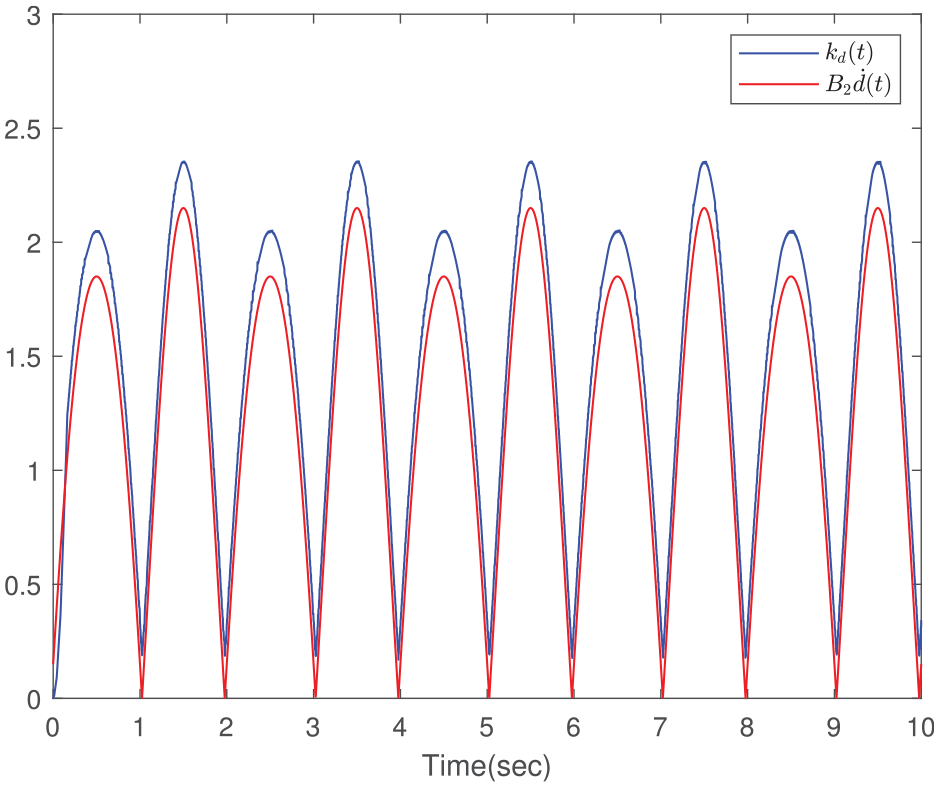
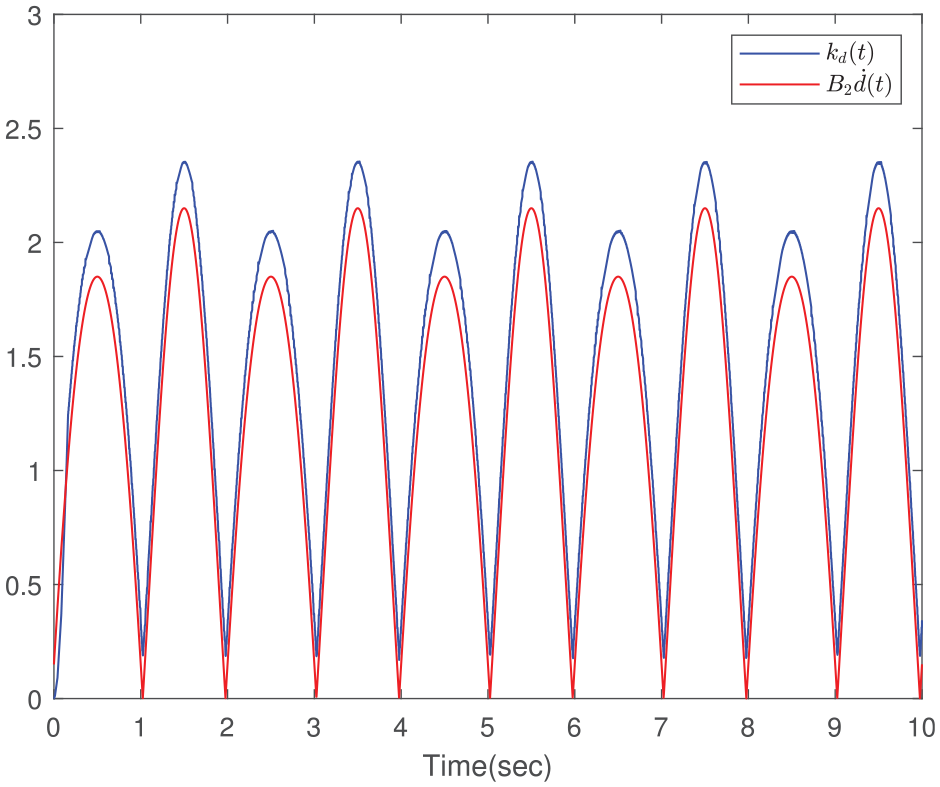
Figure 5 is evolutions of disturbance and its estimation in controller. Compared with Hwang et al.,29 the estimation of disturbance can faster track its true value in finite time under the proposed observer (33). Figures 6 and 7 shown that the adaptive gain still closely follows . As in (48), converges to a safety margin which depends on the parameters and . is always above , the sliding motion will be maintained and the conditions on disturbance bounds are relaxed, the proposed ASMDO does not require information about the bound on the disturbances and their derivatives.
Disturbance and its estimation in controller.
Adaptive gain and disturbance in the proposed observer ( is known but is unknown).
Adaptive gain and disturbance in the proposed observer ( and are unknown).
Conclusion
This paper has addressed a disturbance observer-based control method for continuous-time linear systems with unknown external disturbance. Based on a novel adaptive sliding mode disturbance observer, the output feedback sliding mode controller has been designed, which guarantees that reachability condition holds strictly. In the absence of upper bound information of the disturbance and its first derivative, the restrictive restraints on disturbance have been relaxed by designing the adaptive laws. It is worth mentioning that the estimation of disturbance can track its true value in finite time under the proposed observer. An inverted pendulum on a cart model has been exploited to illustrate the effectiveness of the proposed controller and observer. Simulation results show that the convergence performance of the controller can be further improved, and the finite time control observer-based method will be studied in future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Natural Science Foundation of Tianjin under Grant Number: 19JCTPJC48600.
ORCID iD
Chao Jiang
References
1.
XuQ. Digital integral terminal sliding mode predictive control of piezoelectric-driven motion system. IEEE Trans Ind Electron2016; 63(6): 3976–3984.
2.
SunGMaZYuJ. Discrete-time fractional order terminal sliding mode tracking control for linear motor. IEEE Trans Ind Electron2018; 65(4): 3386–3394.
3.
ZuoZLinT. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int J of Syst Sci 2016; 47(6): 1366–1375.
4.
BalootakiMARahmaniHMoeinkhahH, et al. On the synchronization and stabilization of fractional-order chaotic systems: Recent advances and future perspectives. Phys A Stat Mech Appl2020; 551: 124203.
5.
YuXManZ. Model reference adaptive control systems with terminal sliding modes. Int J Control1996; 64(6): 1165–1176.
6.
YuXFengYManZ. Terminal sliding mode control – an overview. IEEE Open J Ind Electron Soc2021; 2: 36–52.
7.
LeeJChangPHJinM. Adaptive integral sliding mode control with time-delay estimation for robot manipulators. IEEE Trans Ind Electron2017; 64(8): 6796–6804.
8.
EdwardsCSpurgeonS. Sliding mode control: theory and applications. New York, NY: CRC Press, 1998.
9.
ZhangJXiaY. Design of static output feedback sliding mode control for uncertain linear systems. IEEE Trans Ind Electron2010; 57(6): 2161–2170.
10.
ChangJL. Static output feedback sliding mode controller design for minimum phase uncertain systems. IMA J Math Control Inf2015; 32(3): 485–495.
11.
ZhangJShiDXiaY. Design of sliding mode output feedback controllers via dynamic sliding surface. Automatica2021; 124: 109310.
12.
SeuretAEdwardsCSpurgeonSK, et al. Static output feedback sliding mode control design via an artificial stabilizing delay. IEEE Trans Automat Contr2009; 54(2): 256–265.
13.
SongJWangZNiuY. Static output-feedback sliding mode control under round-robin protocol. Int J Robust Nonlinear Control2018; 28(18): 5841–5857.
14.
LaiNOEdwardsCSpurgeonSK. On output tracking using dynamic output feedback discrete-time sliding-mode controllers. IEEE Trans Automat Contr2007; 52(10): 1975–1981.
15.
DuCYangCLiF, et al. A novel asynchronous control for artificial delayed Markovian jump systems via output feedback sliding mode approach. IEEE Trans Syst Man Cybern Syst2019; 49(2): 364–374.
16.
ChenWHYangJGuoL, et al. Disturbance-observer-based control and related methods—an overview. IEEE Trans Ind Electron2016; 63(2): 1083–1095.
17.
WangJLuoXWangL, et al. Integral sliding mode control using a disturbance observer for vehicle platoons. IEEE Trans Ind Electron2020; 67(8): 6639–6648.
18.
SuJYangJLiS. Continuous finite-time anti-disturbance control for a class of uncertain nonlinear systems. Trans Inst Meas Contr2014; 36(3): 300–311.
19.
Alinaghi HosseinabadiPOrdysASoltani Sharif AbadiA, et al. State and disturbance observers-based chattering-free fixed-time sliding mode control for a class of high-order nonlinear systems. Adv Control Appl2021; 3(3): e81.
20.
LeeD. Nonlinear disturbance observer-based robust control of attitude tracking of rigid spacecraft. Nonlinear Dyn2017; 88(2): 1317–1328.
21.
GaoZGeG. Fixed-time formation control of AUVs based on a disturbance observer. Acta Autom Sin2019; 45(6): 1094–1102.
22.
PlestanFShtesselYBrégeaultV, et al. New methodologies for adaptive sliding mode control. Int J Control2010; 83(9): 1907–1919.
23.
Negrete-ChávezDYMorenoJA. Second-order sliding mode output feedback controller with adaptation. Int J Adapt Control Signal Process2016; 30(8–10): 1523–1543.
24.
UtkinVIPoznyakAS. Adaptive sliding mode control with application to super-twist algorithm: Equivalent control method. Automatica2013; 49(1): 39–47.
25.
RoySBaldiSFridmanLM. On adaptive sliding mode control without a priori bounded uncertainty. Automatica2020; 111: 108650.
26.
AbadiASSHosseinabadiPAMekhilefS. Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems. Int J Control Autom Syst2020; 18(10): 2492–2508.
27.
TanCPYuXManZ. Terminal sliding mode observers for a class of nonlinear systems. Automatica2010; 46(8): 1401–1404.
28.
MobayenSJavadiS. Disturbance observer and finite-time tracker design of disturbed third-order nonholonomic systems using terminal sliding mode. J Vib Control2017; 23(2): 181–189.
29.
HwangSParkJBJooYH. Disturbance observer-based integral fuzzy sliding-mode control and its application to wind turbine system. IET Control Theory Appl2019; 13(12): 1891–1900.
30.
UtkinVI. Sliding modes in control and optimization. Berlin: Springer-Verlag, 1992.
31.
MohammadzadehAKumbasarT. A new fractional-order general type-2 fuzzy predictive control system and its application for glucose level regulation. Appl Soft Comput2020; 91: 106241.
32.
MohammadzadehARathinasamyS. Energy management in photovoltaic battery hybrid systems: a novel type-2 fuzzy control. Int J Hydrogen Energy2020; 45(41): 20970–20982.
33.
MosaviAQasemSNShokriM, et al. Fractional-order fuzzy control approach for photovoltaic/battery systems under unknown dynamics, variable irradiation and temperature. Electronics2020; 9(9): 1455.
34.
LiuZMohammadzadehATurabiehH, et al. A new online learned interval type-3 fuzzy control system for solar energy management systems. IEEE Access2021; 9: 10498–10508.