
Abstract
As the explosion-proof safety level of coal mine robot has not yet reached the level of intrinsic safety “ia,” therefore, path planning methods for coal mine robot to avoid the dangerous area of gas are necessary. To avoid a secondary explosion when the coal mine robot passes through gas hazard zones, a path planning method is proposed, considering the gas concentration distributions. The path planning method is composed of two steps in total: the global path planning and the local path adjustment. First, the global working path for coal mine robot is planed based on the Dijkstra algorithm and the ant colony algorithm. Second, with consideration of the dynamic environment, when hazardous gas areas distribute over the planed working path again, local path adjustments are carried out with the help of a proposed local path adjustment method. Lastly, experiments are conducted in a roadway after accident, which verify the effectiveness of the proposed path planning method.
Introduction
Before coal mining or rescue conducting after a coal mine accident, environment detection of the mine is necessary. In this situation, working environment in roadway is always very complex, and coal mine robots are always employed. During the process of environment detection or rescue, secondary explosion must be avoided when the coal mine robot passes through hazardous gas zones.
At present, the coal mine safe electrical apparatus of China is Class I, which is strict with the use mining equipment. For example, if gas concentration exceeds the safety threshold of 0.5%, the mine explosion-proof motor vehicle must be de-energized. Therefore, the safety performances of coal mine robot working in such environment must be higher than that of the current equipment used in coal mine, and the explosion-proof grade need to reach the level of intrinsic safety “ia”. However, very few apparatuses can reach this level. 1 To promote the utility of coal mine robot and avoid danger during the working process, studies on path planning for coal mine robot to avoid obstacle in gas distribution area are of great significance. Existing studies demonstrated that gas in roadways has the regularities of regional distribution and migration 2,3 which laid the foundation for the studies in this article.
Path planning, which is generally a nondeterministic polynomial problem with such constraints as large amounts of environmental information and obstacles, 4 is very important for coal mine robot. Many path planning methods have been proposed for mobile robot, such as the artificial potential field method, 5 the grid method, 6 and the visibility graph method. 7 The traditional path planning methods always have many shortages on convergence and computation complexity, and researchers proposed some new methods. Pan et al. 8 applied an improved ant colony algorithm to the path planning for mobile robot with peaks on the path considered; Zhang et al. 9 proposed a global path planning method for coal mine rescue robot based on ant colony algorithm; Li et al. 10 studied the global path planning method for mobile robot based on particle swarm optimization. Due to the complex working environment in roadway after coalmine accident, few studies on path planning for coal mine robot with consideration of gas concentration distributions have been conducted. The authors of this manuscript have proposed a path planning method for coal mine robot in the previous study, 11 but the dynamic changing of the mine environment is neglected.
In this article, based on the previous studies of the same authors, path planning for coal mine robot to avoid obstacle in gas distribution area was studied, and a path planning method was proposed with consideration of the dynamic changing of the gas concentration distributions. First, the global working path for coal mine robot was planned based on the Dijkstra algorithm and the ant colony algorithm. Second, a local path adjustment method was proposed, which can be employed to adjust the global working path. Lastly, experiments were conducted in a roadway after accident.
Path planning for coal mine robot
The authors of this manuscript have proposed a path planning method for coal mine robot in the previous study. First, with consideration of the gas distribution areas and the obstacles, the MAKLINK Graph method is adopted to describe the working environment network diagram of coal mine robot; second, the initial working paths for coal mine robot are obtained based on Dijkstra algorithm, and then the global optimal working path for coal mine robot is obtained based on ant colony algorithm. However, the dynamic changing of the mine environment is neglected in the previous study. To increase the walking space of coal mine robot, in the path planning, a coal mine robot is regarded as a cuboid, and the faces and the vertices are selected as the reference substances.
The studies of this article are conducted based on the previous studies. With the consideration of the dynamic changing of the mine environment, a novel path planning method, which consists of two steps in total, the global path planning and the local path adjustment, is proposed. With the help of the known messages before mine accident and the modeling of roadway environment after mine accident, first, the global working path for coal mine robot is planed based on the Dijkstra algorithm and the ant colony algorithm; second, when hazardous gas areas distributed over the planed working path again, local path adjustments are carried out by the proposed local path adjustment method. The flow diagram of the proposed path planning method for coal mine robot is shown in Figure 1.
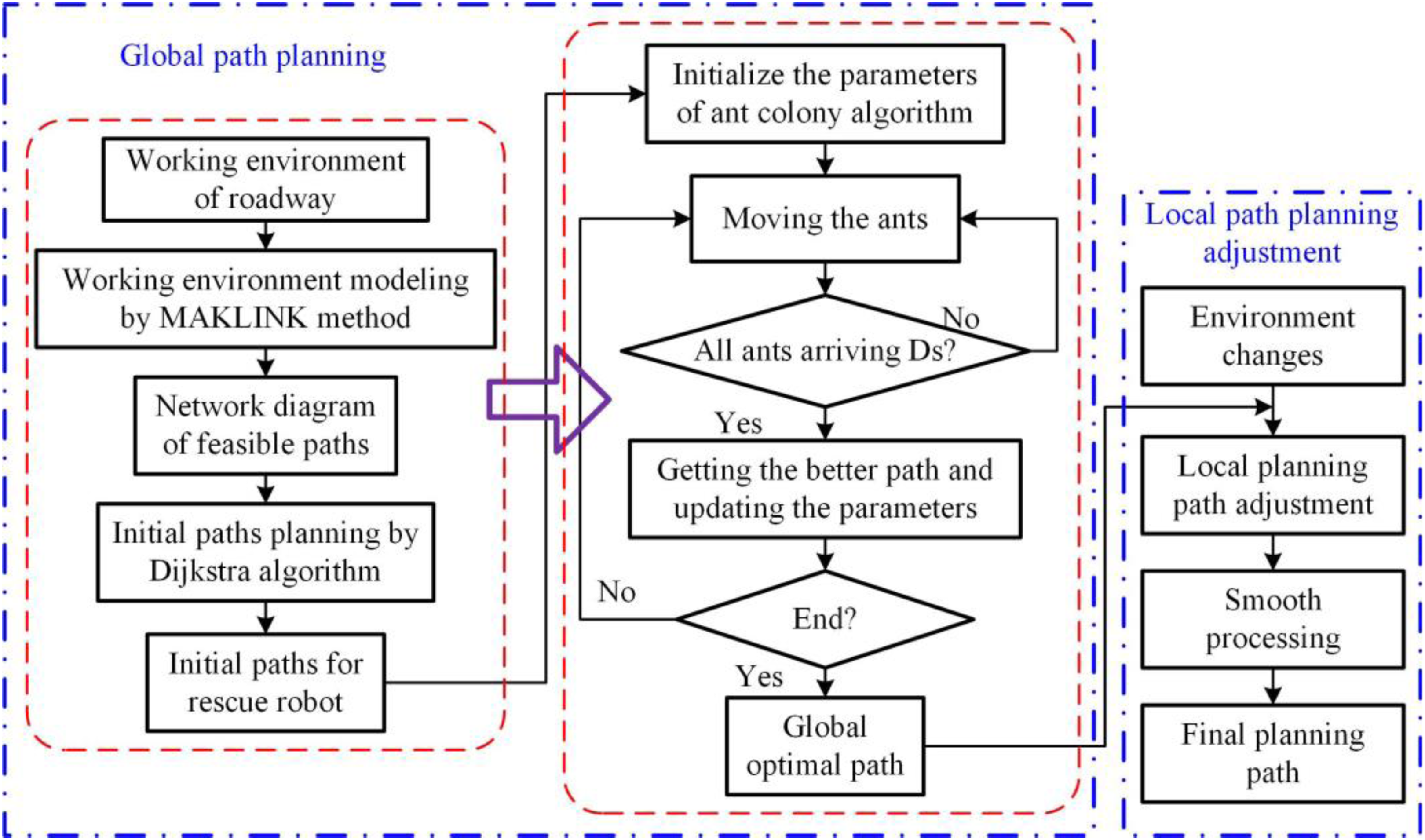
Path planning method for coal mine robot.
Global path planning
The MAKLINK method is adopted to describe the working environment network graph of the roadway, and the Dijkstra algorithm 12 is used to calculate the initial working paths of coal mine robot. Even though a safe working path for coal mine robot can be determined through the Dijkstra algorithm, however, due to the inherent shortcomings of the Dijkstra algorithm, it is difficult to guarantee the obtained path is the optimal one. Therefore, to get the optimal working path of coal mine robot, the initial working paths by the Dijkstra algorithm should be further optimized. Ant colony algorithm is one of the most successful strands of swarm intelligence, which performs well in solving large-scale combinatorial optimization problem. The properties of the ant colony algorithm make it suitable for the path planning of mobile robots. 13 Therefore, the global optimal working path of coal mine robot is calculated by ant colony algorithm.
Assuming that the roadway bottom parallels to plane XOY of the coordinate system OXYZ, and heights of the gas concentration distributions and the obstacles parallels to the Z-axis; The MAKLINK method is used to characterize the map of the coal mine robot’s working environment. Lines that link the vertexes but do not intersect with the obstacles and the gas concentration distribution areas are defined as the MAKLINK lines. The convex polygon areas, which are divided by the MAKLINK lines, make up the feasible working space of coal mine robot. Midpoints of the MAKLINK lines are defined as the possible path nodes v 1, v 2,…,vn . The feasible paths of coal mine robot are the lines that thread the starting point, the possible path nodes, and the target point.
The initial working paths of coal mine robot are obtained based on the Dijkstra algorithm, and then the global optimal working path of coal mine robot is calculated by the ant colony algorithm. Supposing that a working path that is calculated by the Dijkstra algorithm is
During the global working path planning, the length of the initial paths and the distances between the path nodes and the vertexes of the obstacles or the gas concentration distributions should be considered. The objective function of the optimal working path of coal mine robot is defined as follows 14 :

where Hk is the length of the path that passed by the kth ant, and
The edges on initial path in the MAKLINK graph are defined as Hi (I = 1, 2,…, l). The endpoints of Hi are vi, 0 and vi, 1. Other path nodes can be expressed as follows:

where ki is proportion parameter, and
For a given set of parameter ki (i = 1, 2,…, l), a new path can be obtained by the determined new path nodes on each Hi . The path with the minimum function value is the optimal one of coal mine robot.
The initial path Hi is split by a fixed-length ΔH. The numbers of the splits of each initial path Hi can be expressed as follows:

There are

where
The global optimal working path of coal mine robot is calculated by the ant colony algorithm. The detail computational process can be accessed in the study by Mao and Ma. 11
Local path adjustment
Due to the dynamic changing of the gas areas, when the hazardous gas areas distributed over the planed working path again, path adjustments must be carried out. During the working process of coal mine robot, the sensors are working all the time. The local path adjustment method can be described as follows: (1) when the hazardous gas areas distribute over the global optimal working path again, coal mine robot will move a distance of lx along the direction that perpendicular to the global optimal path, the direction of forward motion is priority; (2) if coal mine robot is still in the hazardous gas area, it would be backing to the original position and move a distance of lx along the opposite direction; (3) if coal mine robot is in the safety area after the adjustment, it would be moving to the global optimal path in the rectilinear direction, as shown in Figure 2.

Local path adjustment method.
During the moving process of coal mine robot, a smooth path is in favor of the control of coal mine robot. Path smoothing is to plan a curve that connect any two postures of the robot, and the curve is optimal in the time and the distance. The symmetric polynomial curve is adopted to smooth the obtained final path. 15 The symmetric polynomial curve can be expressed as follows:

where (r, φ) is the coordinate of the point on the curve, R is the radius, and Φ is the central angle of the curve.
Based on the proposed path planning method, coal mine robot can work normally in the environment with dangerous gas distribution areas.
Experiments
Experimental conditions
Experiments were carried out based on the real environmental data of a section roadway of Huainan Panyi Mine, whose length is 50 m and width is 3 m. In the roadway, gas is distributed regionally and the gas concentration is not over standard (<=5%). To ensure the safety of the experiments, the area is assumed to be a gas hazard area if the area gas concentration is greater than 2%. Additionally, a coal mine robot, whose length, width and height are 600, 450, and 430 mm, respectively, was used, as shown in Figure 3. The designed walking speed of the coal mine robot is 1 m/s. 16 During the walking process of the coal mine robot, the landform would be evaluated, if the landform could meet the requirements of walking, the coal mine robot would be walking at the speed of 1 m/s, which will reduce quickly to 0.2 m/s when the obstacle or the gas distribution area is about 3 m far away. During the gas detection process, gas densities were recorded once every 0.5 m in length and width directions, and then gas distribution map was generated; the gas distribution map is shown in Figure 4.

The coal mine robot.

Gas distribution map of a section of the roadway.
Not all regions in Figure 4 meet the conditions of a gas explosion, to increase the walking space of the coal mine robot and to avoid a secondary explosion when it passes through the gas hazard zones, the gas concentration distributions were disposed. The working environment in roadway is always very complex after a coalmine accident. The proposed method is applied to the working path planning for the coal mine robot with considering the gas concentration distributions and obstacles simultaneously. The coordinates of the starting point and the target point for the coal mine robot are (1.5 m, 0) and (1 m, 50 m), respectively. The global working path of the coal mine robot is shown in Figure 5.
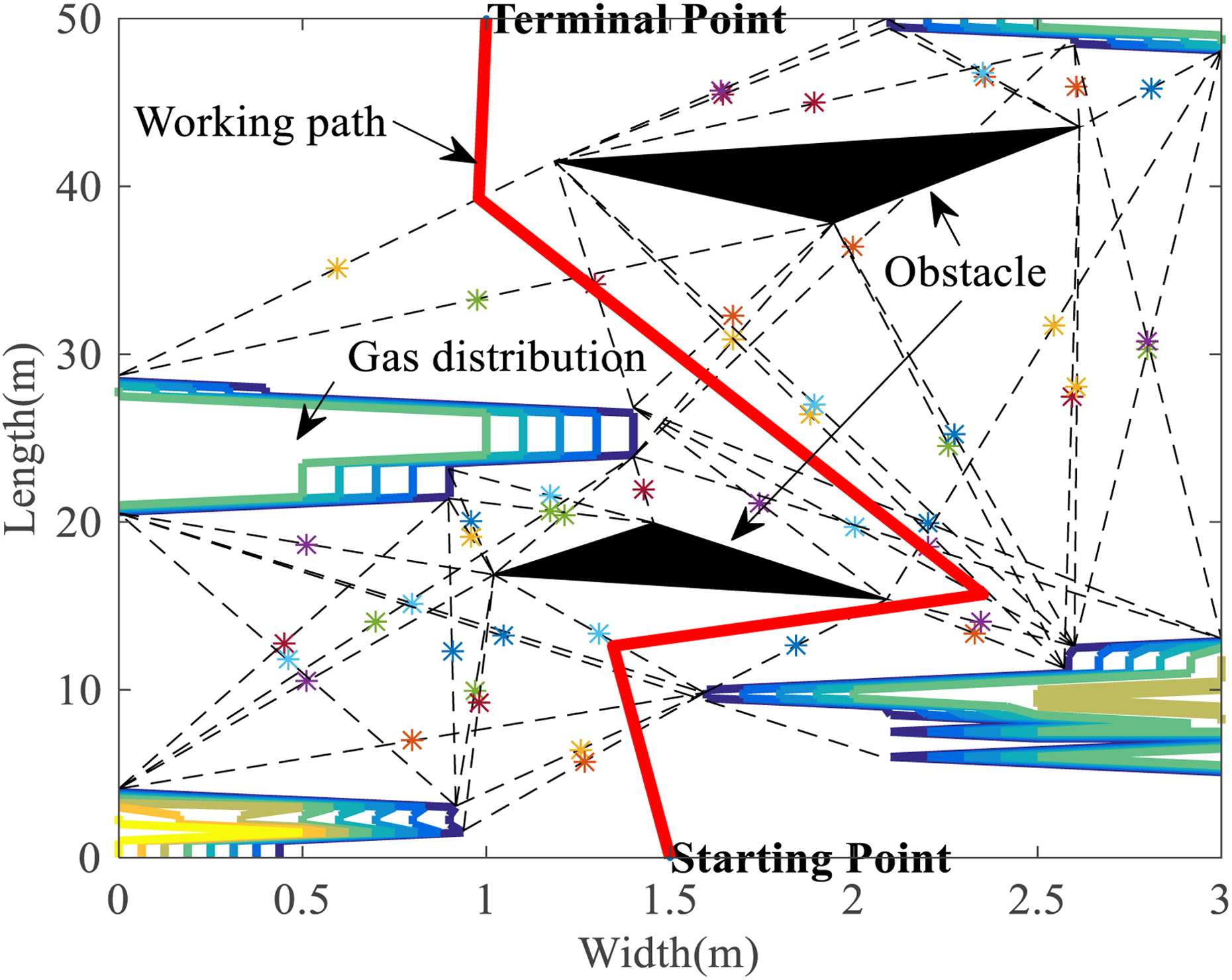
Global optimal working path of the coal mine robot.
Due to the dynamic changing of the gas areas, when the hazardous gas areas distributed over the global optimal working path again, local path adjustments must be conducted. According to the proposed local path adjustment method, the experiments were carried out based on the gas distribution changed from Figure 5 to Figure 6(a). The global working path after the gas distribution changed is shown in Figure 6(b). The local adjustment process of the planning path is shown in Figure 6(c). The final planning path of the coal mine robot is smoothed further, as shown in Figure 6(d).

Path planning after the gas distribution changed. (a) Gas concentration distributions. (b) Former planning path. (c) The adjusted planning path. (d) The final planning path.
As observed from Figure 6(c), due to the dynamic environment, the hazardous gas areas distributed over the global optimal working path again, the coal mine robot changes to a new direction that perpendicular to the global planning path, and it keeps away from the hazardous gas area by four times adjustments. Then the coal mine robot moves to the global planning path in the rectilinear direction that can avoid the obstacles. As observed from Figure 6(d), after smoothed, the planning path of the coal robot is more smoothness which is in favor of the control of the coal mine robot. As for the walking path in Figure 5, the total consuming time of the journey for the coal mine robot is 61.5 s, while that in Figure 6(d), the total consuming time is 80.1 s. The experimental results verify the effectiveness of the proposed path planning method.
Conclusions
Path planning for coal mine robots to avoid obstacle in gas distribution area was studied, and a path planning method was proposed with the consideration of the dynamic changing of the gas concentration distributions. First, the global working path for coal mine robot was planned based on the Dijkstra algorithm and the ant colony algorithm. Second, with the consideration of the dynamic environment, when hazardous gas areas distributed over the planed working path again, local path adjustments are carried out with the help of a proposed local path adjustment method. Lastly, experiments were conducted in a roadway after accident, which verify the effectiveness of the proposed path planning method.
Experiments were carried out in a roadway of Huainan Panyi Mine. Due to the dynamic changing of the gas areas, when the hazardous gas areas distributed over the global optimal working path again, local path adjustments must be conducted. According to the proposed local path adjustment method, the experiments were carried out based on the gas distribution changed from a situation to another. Due to the changed hazardous gas areas, the coal mine robot changed to a new direction, and it keeps away from the hazardous gas area by four times adjustments. Then the coal mine robot moves to the global planning path in the rectilinear direction that can avoid the obstacles. After smoothed, the planning path of the coal robot is more smoothness. The experimental results verify the effectiveness of the proposed path planning method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.