
Abstract
This article studies the leaderless consensus control problem of multiple nonholonomic chained systems. Two smooth time-invariant static distributed controllers are derived based on Lyapunov method, graph theory, and LaSalle invariance principle. Both of the proposed controllers guarantee that the states of the multiple nonholonomic systems globally asymptotically converge to a common vector, provided that the interconnection topology is undirected and connected. In particular, the second control scheme can reduce the size of the control inputs via saturated control and is more applicable in real engineering. Several numerical simulations are implemented for kinematic models of four nonholonomic unicycle mobile robots, demonstrating the effectiveness of the proposed control schemes.
Keywords
Introduction
In the past few years, distributed cooperative control of multiagent systems has attracted a lot of attention due to its widespread applications, including flocking, swarming, formation control, and so forth. 1 –6 As a classical nonlinear system, nonholonomic system has received increasing interest of researchers. 7 –15 Two consensus control problems have been taken into account for nonholonomic systems. The first one is the leaderless consensus control problem, where controllers are derived to make the states of the multiple nonholonomic systems converge to a common configuration. The second one is the consensus tracking control problem with a leader, where controllers are designed to steer the multiple nonholonomic systems to track the leader. 16
For any individual nonholonomic system, there exists no continuous time-invariant static controller that asymptotically stabilizes the state of system to a fixed point, 17 and hence, only the time-varying or discontinuous controller 18 can achieve asymptotic stabilization. For multiple leaderless consensus case, most of the published references still focus on the design of time-varying, discontinuous, or dynamic controller, see the literatures 19 –29 which achieve the leaderless consensus/formation control of multiple nonholonomic systems. In addition, it was reported in the study by Zhai et al. 30 that the smooth time-invariant static distributed control law can realize the asymptotic leaderless consensus of the nonholonomic chained systems over undirected connected graph. However, the Lyapunov-like function candidate in the study by Zhai et al. 30 is only shown to be positive semidefinite, and hence, the system stability requires further analysis. Moreover, Zhai et al. 30 do not take into account the input saturation. Therefore, it is deserved to develop a new smooth time-invariant static distributed control law for leaderless consensus control of multiple nonholonomic systems subject to input saturation.
This article investigates the leaderless consensus control problem of networked nonholonomic chained systems. A Lyapunov function is firstly constructed based on the Laplacian matrix of the associated communication graph, which is proved to be nonnegative and equal to zero only at the point of zero consensus error in the case of undirected connected communication graph. With the aid of the carefully constructed Lyapunov function, the first smooth time-invariant distributed controller is designed ensuring that the Lyapunov function is non-increasing under the undirected connected communication graph. According to LaSalle invariance principle, the consensus error of the nonholonomic systems is shown to globally asymptotically decay to zero. Modifying the first control scheme, the second saturated smooth time-invariant static control law is obtained, which not only achieves the global asymptotic consensus control but also satisfies the input saturation condition. Comparing to the related works, 19 –29 the proposed control strategies are smooth and time-invariant. Comparing to the work of Zhai et al., 30 the second control law can realize the consensus goal in the presence of input saturation.
The rest of this article is arranged as follows. The problem formulation is firstly presented, and then, the two controllers are constructed. Effectiveness of the proposed saturated control strategy is illustrated in “Simulation” section. Finally, the conclusion is included.
Problem statement
Consider that there are N nonholonomic chained systems, and the nonlinear model of the i th system is given by

where
Suppose that the N nonholonomic systems are interconnected via some equipments such that they can exchange information. The information flow between them can be expressed by a communication graph
Denote the consensus error between systems i and j by

Then, the consensus error of the whole N nonholonomic systems can be written as

The leaderless consensus control problem of networked nonholonomic systems is stated as: design a distributed control law
Remark 1
It is well known that the system (1) can not be asymptotically stabilized to a fixed configuration by any continuous time-invariant static state feedback control law. However, the asymptotical leaderless consensus control of equation (1) is not limited by Brockett’s condition, and can be realized by smooth time-invariant static feedback, since the common vector that the system state vectors are required to converge to is not necessarily time-invariant.
Controller development
In this section, two smooth time-invariant distributed controllers are proposed to solve the leaderless consensus problem of networked nonholonomic systems by using LaSalle invariance principle.
Let

where

Define the following function

where L is the Laplacian matrix of the communication graph and
Lemma 1
If the communication graph is undirected and connected, and the constant matrix P is positive definite and symmetric, then the function in equation (4) satisfies
Proof
Since

where IN and I3 are the

Since

Substituting equations (7) and (8) into equation (6) results in

As P > 0 (positive definite) and
Lemma 1 indicates that the constructed function V1 is positive definite and radially unbounded with respect to the consensus error E, and hence can be taken as a Lypaunov function for the leaderless consensus problem of multi-agent linear/nonlinear systems.
Now, based on Lemma 1, we take V1 as the Lyapunov function, and compute its derivative as

where

where k is a positive controller parameter. Under the control law in equation (11), equation (10) becomes

According to

the i th component of U can be easily written as

which is only dependent on the states of system i and its neighbors. In this sense, the derived control law (equation (11) or equation (13)) is distributed.
As
Let us define
where
Theorem 1
The control law in equations (13) and (14) guarantees that the consensus error E globally asymptotically converges to zero, provided that
Proof
Since

Let

Since

From the second equation of equation (15) and

Substituting equation (17) into equation (16) results in

Since
holds for undirected communication graph, which is equal to zero, thus
The above analysis shows that only E = 0 can stay in the invariant set
Remark 2
Different from the existing time-varying or discontinuous controllers in the literatures,
19
–29
which addressed the leaderless consensus/formation control problem of nonholonomic systems, the distributed controller (equation (11) or (13)) is smooth, time-invariant, and static. The achievement of this relies heavily on the Lyapunov function V1 constructed in equation (4). Firstly, V1 is dependent on L, which allows us to design the distributed controller (equation (11)). Secondly, V1 is dependent on the matrix P, not the identity matrix, which ensures
Note that the size of controller (equation (11) or (13)) may become a little large for big xi2 or big consensus error, and the convergence rate may be slow for small consensus error. To deal with the two issues, we propose another saturated version for equation (11) or (13)

where

Under the new saturated control law (equation (20)), equation (12) becomes

The small ε here results in a bigger
Theorem 2
The saturated control law (equation (20)) guarantees that the consensus error E globally asymptotically converges to zero, provided that that
Remark 3
For the second control scheme, the size of the control inputs ui1 and ui2 can be tuned artificially by adjusting k. Compared to the one in the study by Zhai et al., 30 our second control scheme is effective in the case of input saturation and can achieve a quick convergence rate in the small neighborhood of zero consensus errors.
Simulation
In this section, simulation examples are provided to demonstrate the effectiveness of the proposed control schemes. Consider the multiple nonholonomic mobile robots that can be transformed into the nonholonomic chained form. The kinematic model of nonholonomic mobile robots is
27

where
convert the robot model to the form (1). Assume there are four robots (N = 4) connected by the topology depicted in figure 1 of the work of Zhai et al.
30
Under this topology, the Laplacian matrix is

Set the initial states of robots the same as those in the study by Zhai et al.
30
Three cases are taken into account for the simulation.
Case 1: Control strategy equation (11) or (13) with k = 3,
Case 2: Control strategy in the study by Zhai et al.
30
with the controller parameters unchanged.
Case 3: Control strategy (equation (20)) with
Simulation results for cases 1 to 3 are obtained in Figures 1 to 3, respectively. From Figures 1 and 2, it can be observed that the control scheme (equation (11)) and the one in the study by Zhai et al.
30
are both capable of forcing the state vector of the four robots to a common vector. To see the trajectories of control inputs in the transient process, only the change of control inputs in initial 0.1 s is depicted in Figures 1 and 2, showing that the size of control inputs is too large under the controller (equation (11)) or the one in the study by Zhai et al.
30
However, the actuators can not provide such large control signals in real engineering. So, we construct the saturated control law (equation (20)) and draw the simulation results in Figure 3. Obviously, Figure 3 illustrates that the proposed saturated control scheme (equation (20)) can greatly reduce the size of control inputs and simultaneously achieve the leaderless consensus control objective for nonholonomic chained systems. With the introduction of
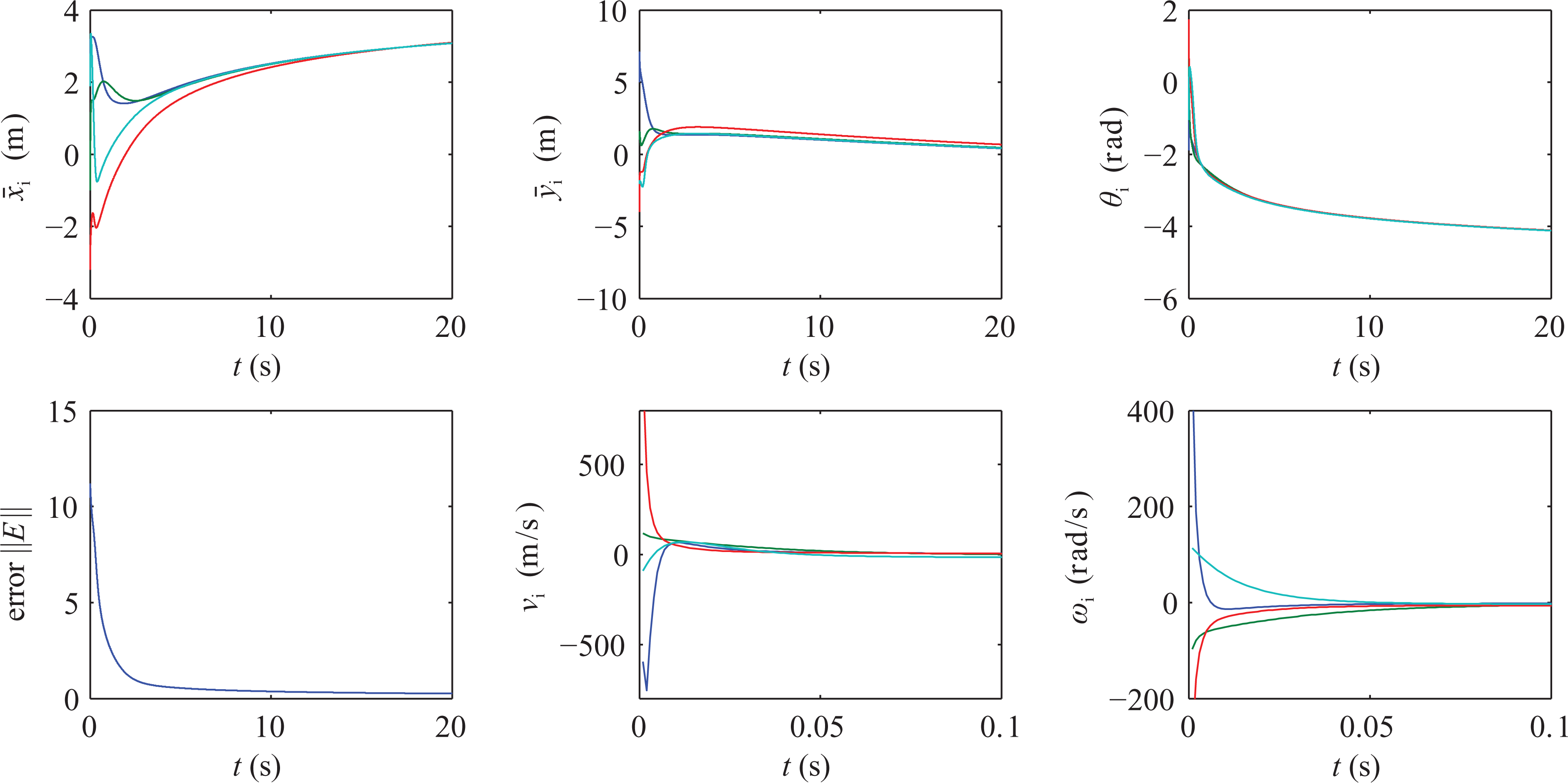
Case 1: Simulation results under the first controller (blue line: robot 1; green line: robot 2; red line: robot 3; and cyan line: robot 4).

Case 2: Simulation results under the controller in the study by Zhai et al. 30 (blue line: robot 1; green line: robot 2; red line: robot 3; and cyan line: robot 4).

Case 3: Simulation results under the second controller (blue line: robot 1; green line: robot 2; red line: robot 3; and cyan line: robot 4).
What’s more, we further consider the special case: the four robots initially locate in a straight line with opposite orientations, that is,

Special case: simulation results under the second controller with the initial condition
Conclusion
In this article, two new simple smooth time-invariant distributed controllers are proposed to make the states of networked nonholonomic chained systems approach a common vector. Strict stability analysis is presented based on Lyapunov method and LaSalle invariance principle, proving that the consensus error globally asymptotically decays to zero. The obtained results clarify that the smooth time-invariant static controllers can achieve the asymptotic leaderless consensus of nonholonomic systems. Future research may lie on extending our method to the consensus control problem of higher-order nonholonomic chained systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Fundamental and Frontier Research Project of Chongqing (No. cstc2016jcyjA0404), Fundamental Research Funds for the Central Universities (XDJK2016C038 and SWU115046), and National Nature Science Foundation of China (No. 61573034 and 61327807).