
Abstract
In this article, a tracking controller for flexible-joint robot manipulators with non-full-state feedback is investigated based on virtual decomposition control (VDC) theory. First, virtual decomposition principle is applied to decouple the entire system of flexible-joint robot manipulator into rigid-link subsystems and flexible-joint subsystems; then, subcontrollers are designed correspondingly for each link or joint subsystem. Importantly, to realize the closed-loop tracking control without state measurements on the link side, an extended Kalman filter is designed to achieve the proposed VDC approach via non-full-state feedback. In addition, strict stability analysis of the control system is given according to the theory of virtual stability and Lyapunov stability. Finally, validation example is provided to verify the proposed control approach.
Keywords
Introduction
In general, due to the use of harmonic reducers, hydraulic, cable, or belts drives in the transmission, joint flexibility often occurs in the articulated robots. This feature reduces the frequency bandwidth of the system and makes the control problem much complicated. 1
In recent years, there are extensive studies for flexible-joint robots. 2 –5 A simplified spring damping model of flexible joints and singular perturbation theory to decompose the flexible-joint robot into fast and slow subsystems was first proposed by Spong. 2 Based on such simplified joint model, a simple proportional-differential (PD) controller for flexible-joint robot manipulator was proposed. 3,4 The influence of the flexibility of joints on the dynamic performance of the robot is systematically analyzed. 5 However, aforementioned studies of flexible-joint robot manipulators are based on the complex traditional Lagrange integrated dynamics model, and thus make the control algorithms time-consuming, especially for the robot manipulators with high degree of freedoms. Meantime, the singular perturbation method used within the frame of traditional Lagrange integrated dynamic model is only applicable for the robot manipulator with weak joint flexibility.
It is worth noting that the virtual decomposition control (VDC) approach proposed by Zhu 6 provides possibilities to break through such restrictions. This approach has been used in the trajectory tracking control of modular and hydraulically powered robot manipulators, 7,8 as well as impedance control for collision detection of robots. 9 It decomposes the overall robotic system into subsystems in respect to either single joint or single link. The subcontroller design for each subsystem is independent, while the coupling relationship between two adjacent subsystems is described by virtual power flow (VPF). Compared with the controller based on Lagrange integrated dynamic model, the calculations by this approach are only proportional to the quantity of subsystems.
Such VDC-theory-based controllers need full-state feedback from both motor side and link side in the flexible joints. However, in most engineering applications, the position and torque measurements on the link side are not always feasible due to the absence of sensors, in addition, angular speed and acceleration measurements of links are apt to be contaminated by external noise. To handle such problem, an extended Kalman filter (EKF) is designed in this article and is incorporated into the VDC approach to eliminate the state measurements of links for flexible-joint robot manipulators.
The main contribution of this article is that we develop a non-full-state feedback VDC approach for flexible-joint robot manipulators. First, different from the conventional Lagrange integrated treatment, the overall system model is decoupled into a certain number of subsystems in terms of either rigid link or flexible joint, which facilitates the dynamics modeling and controller design. Second, considering the state-unmeasurable problem on the link side, an efficient EKF with a new state variable definition is designed to observe the link states of position and torque as well as their differentials and realize the VDC approach with non-full-state feedback.
The article discusses in detail the VDC-based tracking control for flexible-joint robot manipulators via non-full-state feedback. In the second section, the dynamics of rigid-link subsystem and flexible-joint subsystem based on VDC approach and the forward dynamics of flexible-joint robot manipulator are presented. The third section deals with the design of control law for rigid-link subsystem and flexible-joint subsystem. In the fourth section, an EKF is proposed. In the fifth section, virtual stabilities of the subsystems and the whole system with EKF are analyzed by Lyapunov’s theorem. Numerical comparisons are made in the sixth section. Finally, some conclusions are given in the seventh section.
Dynamics modeling
The dynamics of an n degree-of-freedom flexible-joint manipulator can be expressed as link subsystems and flexible-joint subsystems using VDC approach, see Figure 1, where VPF (defined by definition 2.16 in the study by Zhu 6 ) is used to characterize the coupling dynamic interactions among subsystems.

Schematic virtual decomposition of a serial robot manipulator.
Dynamics of rigid-link subsystem
The dynamics equation of the ith rigid-link subsystem expressed in its fixed frame can be written as

where
Dynamics of flexible-joint subsystem
There have been extensive studies on modeling of flexible joints. The dynamics equation of the ith flexible-joint subsystem can be written as


where Ii denotes the rotor inertia of the motor multiplied by the gear ratio squared, fi is the coefficient of friction,
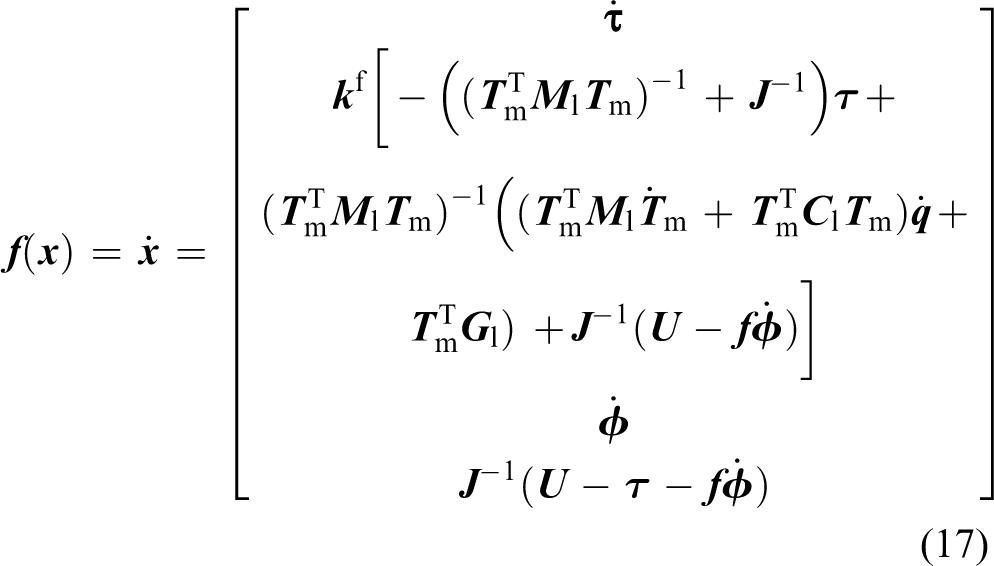
Forward dynamics of flexible-joint robot manipulator
The dynamics of the flexible-joint robot is obtained by the linkage model of the link subsystem and the joint subsystem dynamics with generalized force and velocity mapping. It can be written as


where
Controller design
In this section, to deal with the model uncertainties for flexible-joint robot manipulator, adaptive strategy is adopted in the sub-controller design of rigid-link subsystems and flexible-joint subsystems.
Control objective
The control goal is to design a controller, which guarantees the actual link position;
In brief, the control objective can be expressed as

where the tracking error of the link position

Adaptive control law of rigid-link subsystem
Considering model uncertainties, the link subsystem can be expressed in a linear parameterization form as

where
The control law of link subsystem is designed as

where
Control law of flexible-joint subsystem
The control law of the i th flexible-joint subsystem is






where
Extended Kalman filter
Considering the control law of rigid-link subsystem presented in equation (9) and the control law of flexible-joint subsystem presented in equations (10)
–(15) needs full-state feedback including qi,
Different from the conventional treatment,
11
the state variable

The time derivation of the state variable
and the partial derivative of function

It is noteworthy that, in the EKF with conventional state variable definition,
11
Observation vector

The partial differential equation of the observation vector with respect to the state is

Substitute equations (16) to (20) into the EKF formula presented as equations (21) to (23), then



where
Stability analysis
Stability analysis of the overall system consists of the stability discussions of rigid-link subsystems, flexible-joint subsystems, and EKF.
Stablity analysis of the original system
According to definition 2.17 and theorem 2.1 in the study by Zhu 6 , if each subsystem and EKF is proved to be (virtually) stable, then the entire system is stable in the sense of Lyapunov.
From the control law (equation (9)) and the rigid-link subsystem dynamics (equation (1)), a nonnegative accompanying function for the link subsystem can be chosen as

From the control law (equations (10) to (15)) and the flexible-joint subsystem dynamics (equations (2) and (3)), a nonnegative accompanying function for the joint subsystem can be chosen as

Then, adding all the nonnegative accompanying function together, we get a nonnegative function of the entire system

The time derivation of equation (26) follows that

According to theorem 2 in the study by Zhu,
13
if



Hence, the system is asymptotic stable in the sense of Lyapunov.
Stability analysis of EKF
We first expand


where
Define the observation error as

then from equations (17), (21), (28), and (29), we get

Define

Consider a Lyapunov function as

The time derivation of equation (33) follows that

where
Hence, the exponential stability of EKF is guaranteed.
Finally, the entire system with EKF is asymptotic stable. 11
Numerical simulations
In order to verify the proposed controller (named as VDC + EKF), simulation tests on a two-link robot manipulator with revolute flexible joints (see Figure 2) are made.

A two-link flexible-joint robot manipulator.
The parameters of the links and joints are listed in Tables 1 and 2.
The parameters of rigid links.

The parameters of flexible joints.

Set the process covariance matrix and observation covariance matrix as constant matrices, that is
The desired angular position of links is given as

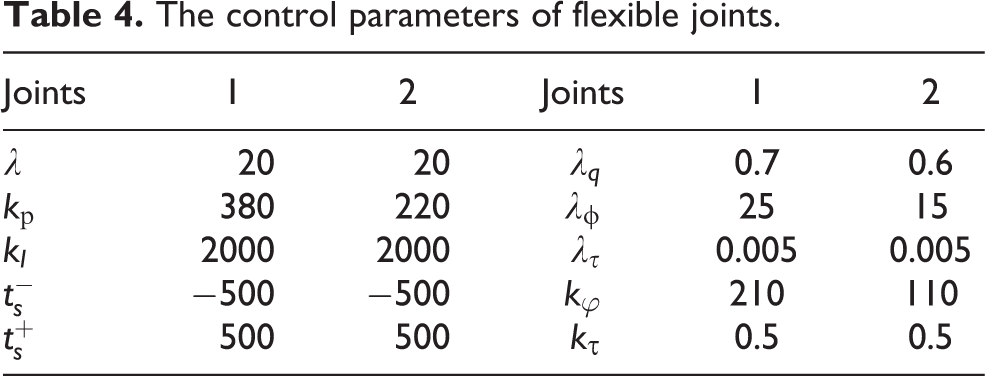
The control parameters of the links and joints are listed in Tables 3 and 4.
The control parameters of rigid links.

The control parameters of flexible joints.
Simulations comparisons are made between the proposed controller (VDC + EKF) and the composite controller that consists of a computed torque sub-controller for its slow subsystem, and a full-state feedback sub-controller for its fast subsystem (CT + FSFC). 12
To make overall quantitative evaluation of the two controllers, we adopt three criteria:
RMS—root mean square of the tracking error of the link computed by equations (36) and (37) on a trip of time T (T = 4 s)
Adjusting time—a period from the start to the moment trajectory tracking error of link falls into area of
Maximum torque—the largest torque input to the joint actuator.


From Figures 3 and 4 as well as Table 5, we can find that the proposed controller VDC + EKF has smaller trajectory tracking errors and shorter adjusting time than the controller CT + FSFC. Meanwhile, as shown in Figures 5 and 6 as well as Table 5, the maximum torque input to each joint of our controller (VDC + EKF) is smaller than that of the benchmark controller CT + FSFC.
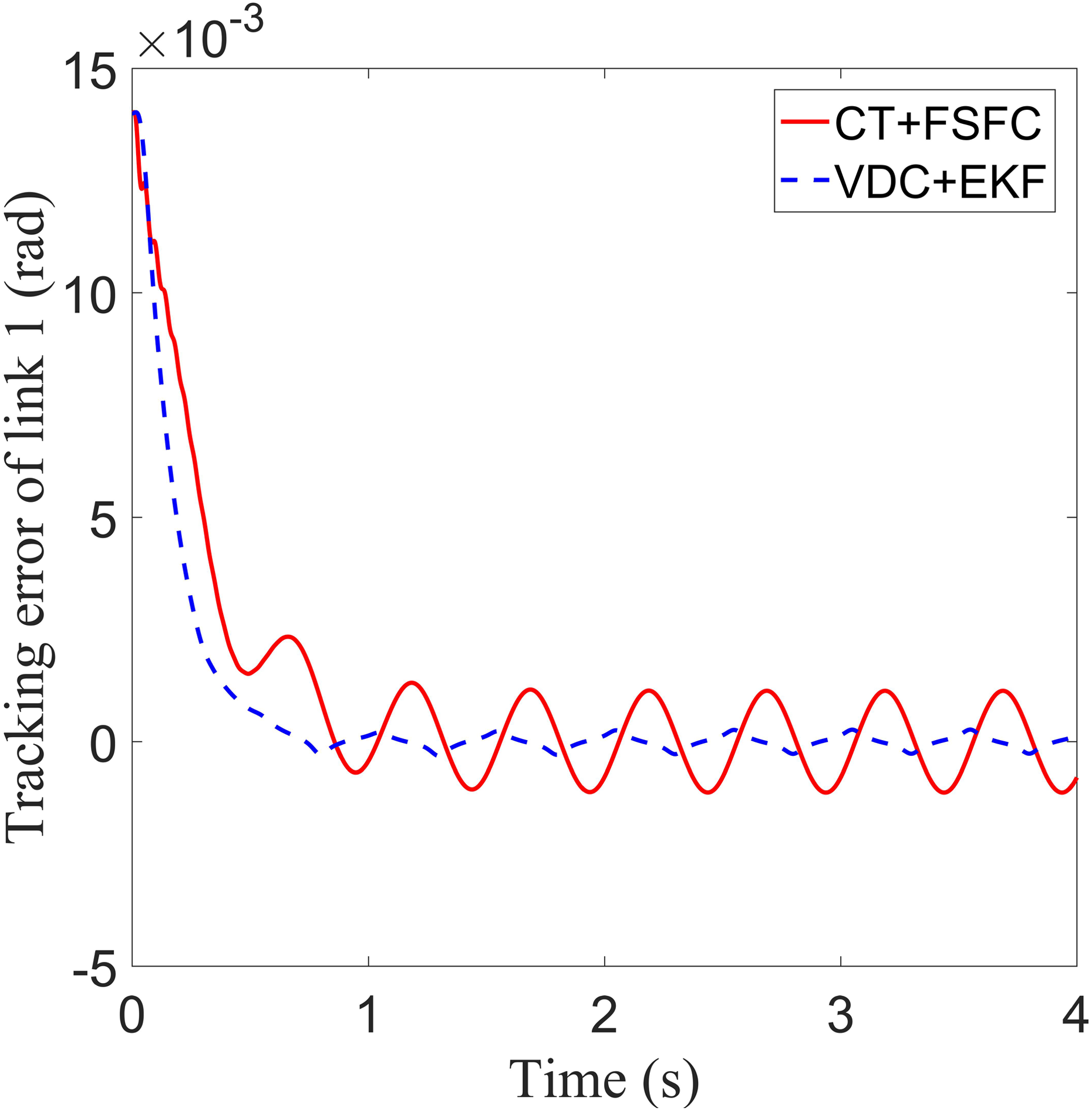
Tracking error of link 1.

Tracking error of link 2.
Comparison of two controllers.

VDC: virtual decomposition control; EKF: extended Kalman filter; RMS: root mean square; CT: computed torque; FSFC: full-state-feedback control.

Torque input of joint 1.
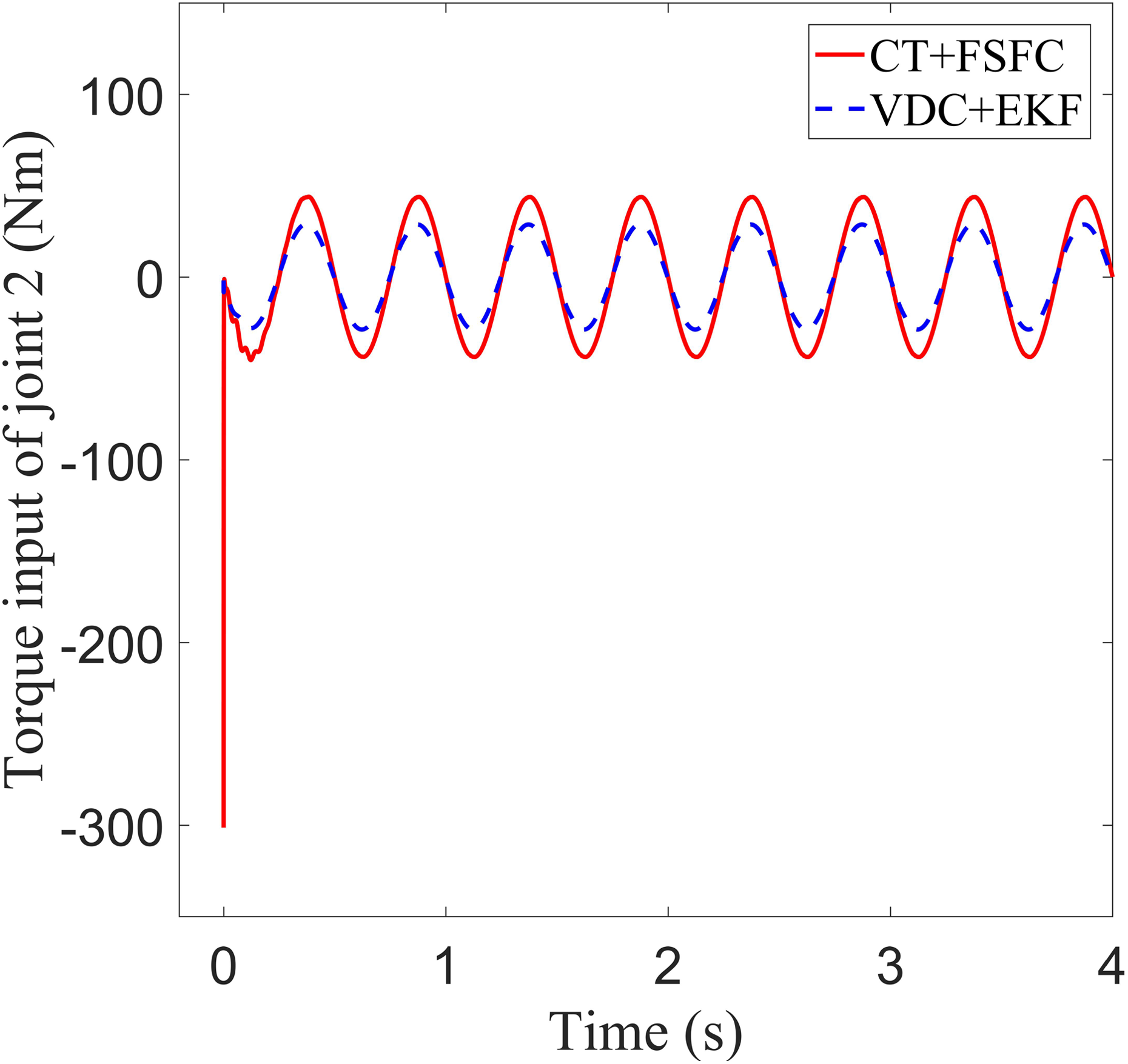
Torque input of joint 2.
Conclusion
In this article, the trajectory tracking control problem of flexible-joint robot manipulators is discussed based on VDC theory. Considering the uncertainty of the model parameters, the VDC law of the link subsystem and the joint subsystem are designed. Furthermore, an EKF observer is designed to achieve closed-loop tracking control with only position and velocity feedback measurement on the motor side, but without measuring the states of position, velocity, and acceleration, as well as torque and its derivative on the link side. Theoretical analysis and example simulation results verify the effectiveness and superiority of the proposed controller.
Footnotes
Acknowledgments
The authors would like to thank Professor Wenhong Zhu at the Canadian Space Agency, Canada, for providing great theoretical suggestions and the ROBOTEAM group at Donghua University for the discussional support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received financial support from the National Natural Science Foundation of China under grant no. 61203337, the Natural Science Foundation of Shanghai under grant no. 17ZR1400100, the DHU Distinguished Young Professor Program under grant no. B201309, the Fundamental Research Funds for the Central Universities under grant no. 2232012D3-18, and the Chen Guang project supported by the Shanghai Municipal Education Commission and the Shanghai Education Development Foundation under grant no. 13CG29 for this research and publication of this article.