
Abstract
Due to the great adaptability, snake-like robots can serve as special intelligent service robots. In this article, a novel triple-layered central pattern generator (CPG)-based controller is proposed to control the 3D locomotion of snake-like robots. The proposed triple-layered CPG includes a rhythm generation layer, a pattern generation layer, and a motoneuron layer. The nonlinear Kuramoto oscillator and the rhythmic dynamic movement primitive are, respectively, used to model the interneurons and motoneurons. The triple-layered CPG can flexibly generate the multidimensional phase-coordinated control signals of snake-like robots. Firstly, the architecture of the proposed triple-layered CPG is validated, and the impacts of control parameters on the outputs are numerically analyzed. Secondly, the smooth locomotion transition process of the triple-layered CPG is discussed. Finally, the performances of the proposed triple-layered CPG for controlling snake-like robots have been evaluated through the co-simulation of Simulink and MSC Adams [version 2012]. The results illustrate that the proposed triple-layered CPG can easily and flexibly generate continuous and smooth for controlling 3D locomotion of snake-like robots. It can improve the mobility and adaptability of snake-like robots.
Keywords
Introduction
Due to the redundant structure, the biological snakes have great mobility and adaptivity skills. The biological snakes are capable of performing flexible 3D locomotion. The most typical 3D locomotion of the biological snakes is sidewinding locomotion. In order to obtain locomotivity of the biological snakes, plenty of snake-like robots have been designed in the past decades. 1 –4 The potential applications of snake-like robots include inspection and search-and-rescue operation in the hazardous ruins. Therefore, the snake-like robots are mostly applied as special service robots.
The gaits of biological snakes are basically rhythmic locomotion. Hirose 5 and Ma 6 proposed the serpenoid and serpentine curves, respectively, to describe the motion feature of the lateral undulation of biological snakes. The joint trajectory of snake-like robots is proved to be a sinusoid curve. 7 The locomotion and body shape of snake-like robot can be modulated by changing the amplitude, phase bias, frequency, and shift of the joint motion function. To implement the 3D locomotion, the snake-like robot is composed of pitch-and-yaw joint modules. 8 The pitch and yaw joints belong to different functional units. The 3D locomotion can be regarded as the combination of the horizontal and vertical movements. 9,10 Enner et al. and Rollinson and Choset utilized the sin-based method for controlling the 3D locomotion of snake-like robots. 11,12 The authors introduced a new phase bias variable to determine the relation between the pitch and yaw joint groups. However, the major defect of sin-based method is that it cannot ensure the smooth gait transition. 13,14
The biologists have proved that the rhythmic locomotion of vertebrates is controlled by central pattern generator (CPG). CPG is a neural network capable of generating rhythmic pattern outputs spontaneously and simultaneously. The fascinating features of the CPG-based locomotion controllers include rhythmicity, variety, stability, and adaptability. 15,16 Therefore, the CPG is widely applied to control the bioinspired robotic locomotion. The CPG can be divided into two categories, that is, the biological neuron-based CPG and the nonlinear oscillator-based CPG. The most typical biological neuron-based CPG is the Matsuoka neuron-based CPG which has many control parameters. 17 Lu et al. proposed a cyclic inhibitory CPG based on the Matsuoka neuron to control the 3D locomotion of snake-like robots. 18 A pair of the pitch and yaw joints are controlled by three neurons. The proposed cyclic inhibitory CPG-based controller can well realize gaits transition. 19 Wu and Ma 20 pointed out that the cyclic inhibitory CPG can produce smoother movements of each joints. However, the outputs of the proposed CPG-based controller are not sinusoid curves. This may reduce the locomotive efficiency of snake-like robots. The coupling topology of the proposed cyclic inhibitory CPG is more complex.
The typical nonlinear oscillator-based CPGs include Hopf oscillator, 21 Van der Pol oscillator, 22 and Kuramoto oscillator. 23 Compared with the biological neuron-based CPGs, the nonlinear oscillator-based CPGs have simple coupling topology and a few control parameters. The Kuramoto oscillator is one of the most basic models widely used to study the neurobiological oscillatory activity. It can describe how a group of interacting neurons produce the synchronized behaviors. Ijspeert et al. 24 proposed an amplitude-controlled Kuramoto oscillator (ACKO)-based CPG for controlling the spinal locomotion of a salamander robot. Crespi and Ijspeert 25 applied the ACKO-based CPG for controlling a planar snake-like robot. Tang et al. 26 proposed a multimodal CPG based on the Kuramoto oscillator for controlling the 3D locomotion of snake-like robot. The coupling topologies of the multimodal CPG and the ACKO-based CPG are identical. Two oscillators are used to control a joint in both CPG-based controllers. Nor and Ma presented a simplified CPG based on Kuramoto oscillator for a planar snake-like robot. In the simple CPG, each joint is controlled by one oscillator. 27 Whitman et al. 28 utilized the ACKO-based CPG with simplified topology for controlling the 3D locomotion of snake-like robot. Each joint of the snake-like robot is controlled by one ACKO. However, the phase-bias between adjacent joints in the identical functional unit (e.g. the pitch or yaw joint groups) and the phase-bias between the functional units are coupled. This may result in unforeseen movements of snake-like robots in the gait transition process. In recent studies, it is proved that the structure of CPG is composed of three layers, that is, the rhythmic generator layer (RGL), the pattern generator layer (PGL), and the motoneurons layer. 29 The RGL and the PGL, respectively, determine the phase of functional units and the joints in identical functional units. Nassour et al. 30 and Li et al. 31 proposed a multi-layered CPG for the humanoid robots. Yang et al. proposed a hierarchical connectionist CPG based on the cyclic inhibitory neuron model. 32 However, the function of PGL is to filter the outputs of RGL. The phase biases of the functional units and the joints are both determined by the RGL yet.
To adapt to the complex terrains, snake-like robots can modulate their locomotion by changing the control parameters of CPG. The CPG-based controllers may produce unsmooth movement when the control parameters are abruptly changed. The unsmooth movement may result in physical damages of biological systems, such as tearing of muscles or breaking of bones when the dynamic thresholds are exceeded. 33 The snake-like robots are also mechanical systems composed of the joint motors, gearboxes, and body shell frames. If the dynamic thresholds are exceed, it may induce possible damage in the joint motors and gearboxes. Ijspeert et al. presented that the smooth gait transition is one of the most interesting features of the CPG-based controllers. 16 Therefore, optimizing the transition movement is beneficial by which it can avoid the damage of robotic components and increase the kinetic stability. A critically damped equation is used to modulate the amplitude and offset of each joint control function. 24,25,28 Bing et al. 14 proposed a novel gradient system-based CPG combining the critically damped equation. The CPG can generate smooth transition of body shape and locomotion speed. Nor and Ma proposed a linear phase transition function for the simplified CPG. 34,35 The snake-like robot can perform smooth gait transition through modulating phase bias. The authors also presented a criteria of movement smoothness. The smoothness of CPG outputs is discussed from the view of mathematical analysis. In addition, Tang et al. 26 and Li et al. 31 both used a simple exponential function to control transition process. Chen et al. 36 proposed a three chained first-order filters to control the phase bias for controlling hexapod robots.
In this article, a triple-layered CPG-based controller is proposed for controlling the 3D locomotion of snake-like robots. The proposed triple-layered CPG can generate smooth gait transition and separate the coupling effects between the functional units and joints. The rest of this article is organized as follows. In “3D Locomotion of snake-like robots” section, the serpenoid curve and the 3D locomotion planning are presented. “Architecture of triple-layered CPG” section introduces the architecture and the neuron model of the triple-layered CPG-based controller. The smooth transition analysis for switching the locomotion modes is illustrated in “Smooth locomotion transition” section. The simulation results of the snake-like robot with the proposed triple-layered CPG-based controller are presented in “Simulation results and discussion” section. “Conclusion and future work” section introduces the conclusion and the future works.
3D locomotion of snake-like robots
Through analyzing the lateral undulation of biological snakes, Hirose et al. 5 proposed the sepenoid curve to control the 2D locomotion of snake-like robots. The expression of the continuous serpenoid curve is given as

where a is denoted as the winding angle, b indicates the number of periods, c determines the offset, and s is the displacement along the serpenoid curve. The serpenoid curve is shown in Figure 1. It can be seen that the parameter c can be used to control the direction of the snake-like robot. The parameters a and b are used to control the body shape of the snake-like robot.
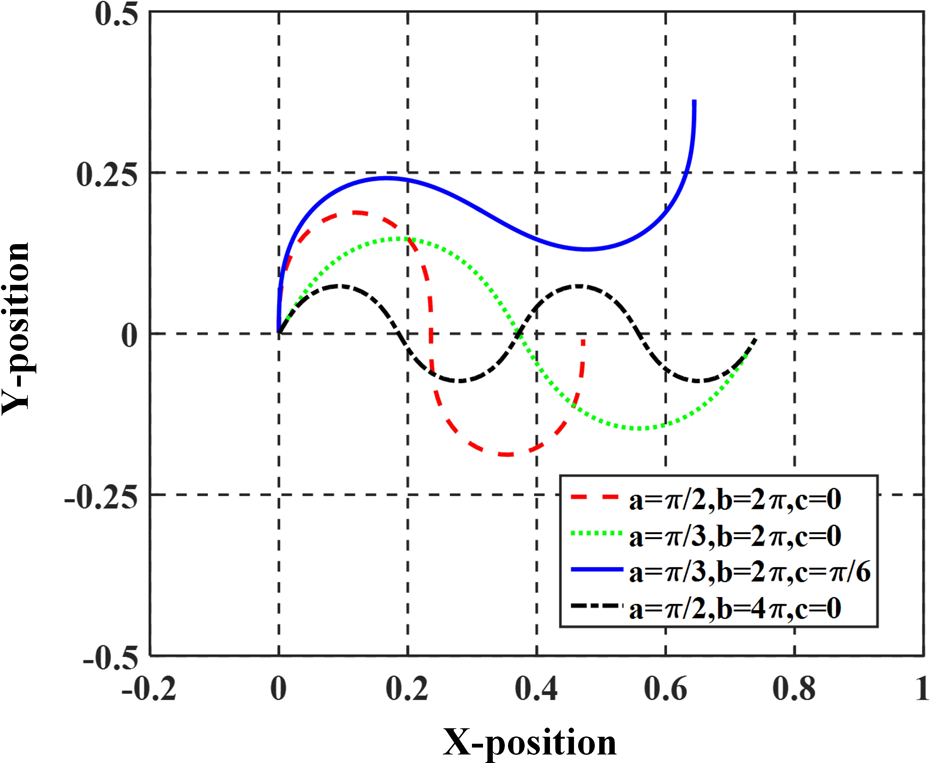
The effects of the three parameters on the shape of the serpenoid curve.
The snake-like robot is a hyper redundant robot with many degrees-of-freedom (DOFs). The kinematic model of the snake-like robot can be simplified as a multi-link model. The discrete serpenoid curve is presented by Saito et al. 7 The corresponding expression of the discrete serpenoid curve is given as

where the total length of the snake-like robot is set as 1, (xi , yi ) is the position of the ith joint, and N is the number of links.
Based on the discrete serpenoid curve, the angular control function of each joint is calculated by

where the amplitude of joint angle is determined by α = −2asin(b/2N), the phase bias is denoted as β = 2πK/N, and the joint offset is controlled by γ = −c/N.
The mechanism of the snake-like robot applied in simulation is shown in Figure 2(a). The snake-like robot consists of 12 modules in series. The axes of the adjacent joints are mutually orthogonal which is shown in Figure 2(b). The rotation range of each joint is ±90°. The pitch and yaw joints are, respectively, utilized to simulate the vertical and horizontal muscles of biological snakes. The pitch and yaw joints belong to different functional units. With this configuration, the snake-like robot can perform flexible 3D locomotion.
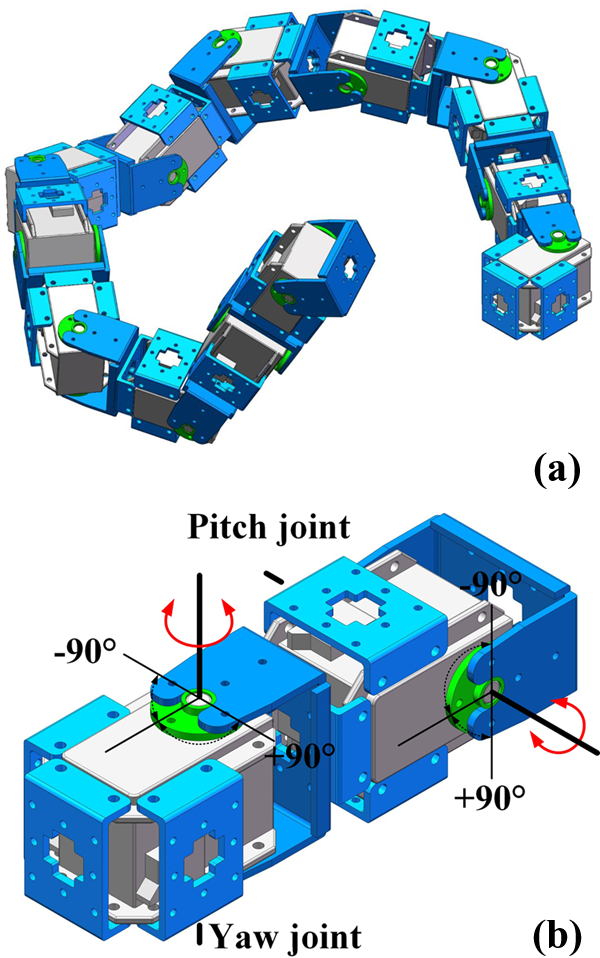
The mechanism of the snake-like robot used in the simulation: (a) the 3D structure of the snake-like robot; (b) the detailed mechanism and connections of the adjacent joints.
Based on the research of Gómez, 37 the movement of the horizontal and vertical muscles can be divided into three basic motion primitives, such as the serpenoid curve, the circle curve, and the reset position. The snake-like robot can perform 3D locomotion through combining the different movements of the joint groups. As illustrated in Figure 3, the snake-like robot can perform two kinds of 2D locomotion and four kinds of 3D locomotion. The work in this article is focused on the 3D locomotion of the snake-like robot, such as sidewinding, spinning, circular travelling wave, and lateral rolling. In this article, a novel triple-layered CPG-based controller is proposed for controlling the snake-like robot.

The 3D locomotion planning of the snake-like robot.
Architecture of triple-layered CPG
Architecture design
McCrea and Rybak
29
proposed a multiple layered architecture to describe the mechanism of CPG. The 3D locomotion of snake-like robots is achieved through configuring the motion function and the phase relation of each joint. As previously described, the phase relation is composed of the intergroup phase and intragroup phase. However, the intergroup phase and the intragroup phase in the typical single-layered and double-layered CPGs are hard to differentiate exactly. The snake-like robot cannot switch and modulate locomotion flexibly and easily. In this article, a novel triple-layered CPG-based controller is proposed for the snake-like robot. As illustrated in Figure 4(a), the architecture of the proposed triple-layered CPG is divided into three layers which include an RGL, a PGL, and a motoneuron layer (MNL). The neurons in the RGL and PGL are both interneurons, and the neurons in the MNL are motoneurons. As shown in Figure 4(b), the coupling relation between the neurons in the proposed triple-layered CPG for snake-like robot should satisfy the following conditions: The outputs of RGL interneurons determine the interphase relation of different functional units (e.g. the groups of pitch and yaw joints). The phase of RGL interneurons is the reference of PGL interneurons. The RGL interneurons are mutually coupled. The number of the RGL interneurons is determined by the number of functional units. For example, the snake-like robot proposed in this article has pitch and yaw joints. The RGL has two interneurons. The PGL interneurons are divided into several groups according to the functional units. In the identical functional units, the relation between PGL interneurons and joints is one-to-one. The outputs of PGL interneurons determine the phase relation of each joint. The adjacent PGL interneurons are mutually coupled, and the coupling relation between the RGL and PGL interneurons is directional. The PGL interneurons do not affect the RGL interneurons. The number of the PGL interneurons is determined by the number of joints. For example, the snake-like robot proposed in this article has 12 joints. The proposed CPG has 12 PGL interneurons. The motoneurons in the MNL are directly used to control the joint motion of snake-like robot. According to the desired trajectories, the function of MNL motoneurons is to map the PGL outputs to the angular position of each joint. The relation between the PGL interneurons and motoneurons is also one-to-one. The motoneurons are not coupled with each other.

The architecture of the proposed triple-layered CPG-based controller: (a) the layered structure; (b) the coupling relations of the neurons in the triple-layered CPG. CPG: central pattern generator.
Based on the above principles, the architecture of the triple-layered CPG proposed for the snake-like robot with 12 joints is presented in Figure 5. There are two RGL interneurons for controlling the groups of pitch and yaw joints, respectively. Therefore, the PGL interneurons are also divided into two groups. Each group has six PGL interneurons. The outputs of PGL interneurons are mapped into the control signals of each joint through the MNL motoneurons.

The detailed triple-layered CPG-based controller proposed for controlling the 3D locomotion of snake-like robots with 12 joints. CPG: central pattern generator.
Interneuron model
The interneurons in the RGL and PGL are both modeled by the Kuramoto oscillators. The function of the interneurons is used to control the phase relation of the functional units and the joints. 38 The interacting Kuramoto oscillators can produce the synchronous behaviors and generate oscillations spontaneously. 39,40 The RGL interneurons only coupled with the neurons in the same layer. The model of the two RGL interneurons for the snake-like robot is given as

where θRi and ωRi are, respectively, the state variable and intrinsic frequency of RGL interneurons. The frequency ωRi is always set as equal for simplifying the model, ωRi = ωRj (i ≠ j). wRij is the coupling weight between the ith and jth RGL interneurons. For the bidirectional coupling, wRij = wRji (i ≠ j). ϕRij is donated as the phase bias between the ith and jth RGL interneurons, ϕRij = −ϕRji (i ≠ j). ψRi is the output variable of RGL interneurons.
The PGL interneurons is affected by the RGL interneurons. The coupling relation between the RGL and PGL interneurons is directional. Therefore, the model of PGL interneurons related to the identical functional unit is given as

where θPi , ωPi , wPij , and ϕPij are, respectively, the state variable, intrinsic frequency, coupling weight, and phase bias of PGL interneurons. ψPi is the output variable of PGL interneurons. The first PGL interneuron is coupled with the RGL interneuron. The other interneurons are not coupled with the RGL interneuron. The coupling weight wRP is set equal to wPij .
Four numerical analyses have been done to figure out the impacts of the control parameters on the outputs of RGL and PGL. The changing process of phase bias is recorded. As shown in Figure 6(a), (e), and (i), the phase of PGL interneurons is modulated when the interphase biases ϕRij of RGL interneurons are changed. The PGL interneurons in the identical functional units suffer the same modulation. The phase of RGL interneurons is the reference of PGL interneurons. Figure 6(b), (f), and (j) illustrates that the oscillating frequency of the interneurons is determined by the intrinsic frequency ωR/Pi . As shown in Figure 6(c), (g), and (k), the phase relation of PGL interneurons is changed through modulating the intraphase bias ϕPij . The outputs of PGL interneurons do not affect the phase of RGL interneurons and the other groups of the PGL interneurons. This feature can make the gait modulation simpler. This feature also verify that the function allocation of the proposed triple-layered CPG is more reasonable and flexible. Compared with the results presented in Figure 6(j), the synchronous rate of the interneurons in both RGL and PGL is reduced when the coupling weight is minished, as shown in Figure 6(l).
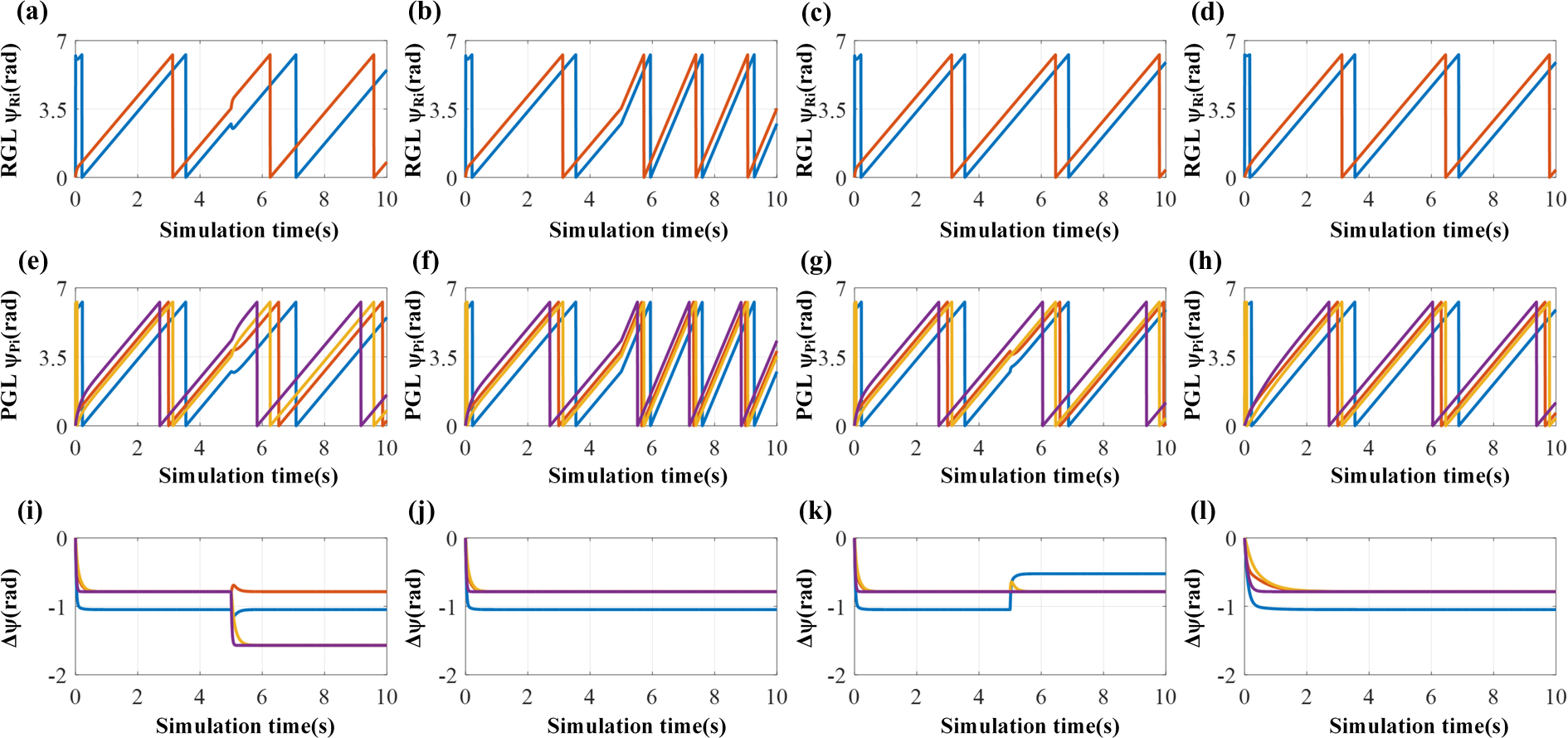
The impacts of the control parameters on the output signals of the RGL and PGL. (a), (e), and (i) The phase bias ϕRij of the RGL interneurons are changed from π/4 to π/2 at t=5s. (b), (f), and (j) The intrinsic frequency ωR/Pi of the RGL and PGL interneurons are changed from 0.3 to 0.6 at t=5s. (c), (g), and (k) The phase bias ϕPij of the PGL interneurons are changed from π/3 to π/6 at t=5s. (d), (h), and (l)The coupling weight wR/Pij of the RGL and PGL interneurons are set as 5.
Motoneuron model
The outputs of PGL and RGL interneurons only determine the temporal relation of the different functional units and the joints. The phase signals cannot be directly applied to control the trajectory of each joint. The spatial relations of the joints are determined by the MNL motoneurons. Therefore, the function of MNL motoneurons is to map the phase signals generated by the PGL interneurons to the position control signals of the joints. The MNL motoneurons could reshape the trajectories of each joint. Inspired by the biology, Ijspeert et al. proposed a motion controller called dynamic movement primitive (DMP). 41 According to the theory of morphed oscillation, 42 the periodic DMP is a second-order morphed oscillator which can adapt the baseline behavior into any limit cycle shape. Therefore, based on the concept of the periodic DMP, the model of MNL motoneurons applied in the proposed triple-layered CPG is given as
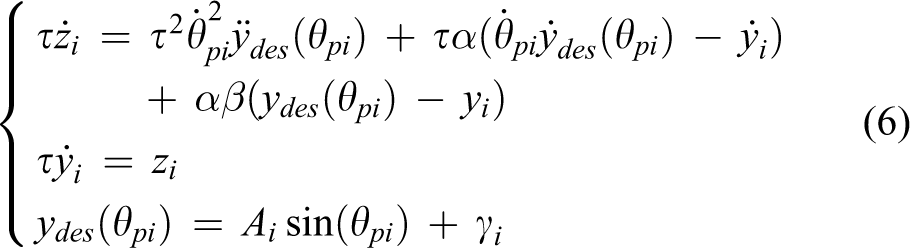
where yi is the output variable of MNL motoneurons, which controls the joint motion. zi is the state variable. y des(θpi ) is the expected joint motion function which is based on the outputs of PGL interneurons. τ is the time constant, and α and β are the proportionality constants. To hold the strict damping constraint, the proportionality constants satisfy the condition β = α/4. Ai and γi are, respectively, the amplitude and offset of the joint motion function.
Figure 7 presents the numerical analysis results of the MNL motoneurons. In the analysis, the configurations of the RGL and PGL remain unchanged. Compared with the Figure 7(c), the output signals of MNL motoneurons shown in Figure 7(g) converge to the desired curves more slowly when the proportionality constants are reduced. For the locomotion of circular travelling wave, the group of yaw joints moves to a fixed position during the movement. Therefore, the outputs of MNL motoneurons should be constant. As shown in Figure 7(k), the MNL motoneurons can satisfy the requirements of controlling the 3D locomotion of snake-like robots. In Figure 7(c), (g), and (k), the outputs of MNL motoneurons do not satisfy the constraint of serpenoid curve during the initial asynchronous process. Therefore, the outputs of MNL motoneurons should be masked. The masked function of the proposed triple-layered CPG is given as

where ϕi(t) is the direct control signal of the ith joint. κ is the steepness constant of the sigmoid function. μ is the x-value of the sigmoid’s midpoint. For the proposed triple-layered CPG in this article, the parameters are κ = 10 and μ = 1.

The impacts of the controlled parameters on the output signals of the MNL motorneruons. (a)-(d) The time constant τ = 1, the proportionality constants β = α/4 = 2. (e)-(h) The time constant τ = 1, the proportionality constants β = α/4 = 1. (i)-(l) The desired function of the MNL motorneruons are respectively set as y des (θpi ) = π/12 and ydes (θpi ) = π/6sin(θpi ).
As shown in Figure 8, a triple-layered CPG, which is composed of two RGL interneurons, four PGL interneurons, and four MNL motoneurons, is established to evaluate the performance. The phase bias between the RGL interneurons is set as π/4. The phase biases between the PGL interneurons in different functional units are set as π/4 and π/3. The phase bias between RGL and PGL interneurons is set as 0. The desired functions of MNL motoneurons are, respectively, y des1(θp 1) = π/4, y des2(θp 2) = π/6sin(θp 2), y des3(θp 3) = π/3, and y des4(θp 4) = π/6sin(θp 4). The simulation results of the proposed triple-layered CPG are shown in Figure 9. It can be seen that the signals can gradually and smoothly converge to the desired curves. As presented in Yu et al., 15 the collective synchronization of Kuramoto oscillators emerges spontaneously when the coupling weight increases beyond a certain threshold. Based on the conclusions of Wang and Ghosh, 43 the proposed triple-layered CPG with a chained topology is stable.

The proposed triple-layered CPG established for evaluating the performance. CPG: central pattern generator.

The outputs of the proposed triple-layered CPG with the masked function. CPG: central pattern generator.
Smooth locomotion transition
To adapt to complex terrains, the snake-like robot adjusts its locomotion through modulating the control parameters of the proposed triple-layered CPG based on the sensory feedback. In the definition of the serpenoid curve, the body curve of the snake-like robot is shaped by the parameters a, b, and c. The effects of the three parameters are, respectively, equivalent to the parameters α, β, and γ of the joint motion function (equation (3)). The oscillating frequency ω determines the moving velocity of the snake-like robot. To prevent the motor and gearbox from being damaged and improve the kinetic stability of robots, the motion profiles of the joint actuators should be smooth. Nor and Ma 35 applied the geometric continuity of the curve to evaluate the smoothness of the outputs of the CPG-based controller. The trajectory curves of each joints should satisfy the G2 continuity which can avoid the possible damage of the motors and gearboxes. It means that the outputs of the proposed triple-layered CPG also must keep the continuous and smooth acceleration.
The smoothness of the outputs of MNL motoneurons is determined by the y des(θpi ). The first and second derivatives are given as

where
It can be seen that the smoothness of the outputs of MNL motoneurons is indirectly determined by the amplitude, phase, frequency, and offset of each joint. To ensure continuous and smooth trajectories, a sigmoid-based parametric transition function is applied to control the transition of control parameters. The detailed expression of the sigmoid-based parametric transition function is given as

where ui and ui + 1 are, respectively, the initial and target values of the control parameters. t 1 is the transition time, and a and ε are, respectively, the steepness and midpoint of the sigmoid function.
Figure 10 presents the outputs of the proposed triple-layered CPG when the four parameters are modulated. As shown in Figure 9(a) to (d), the outputs of the MNL motoneurons all smoothly converge to the desired trajectories. Figure 10(e) to (h) and (i) to (l) presents the first-order and second-order derivatives of the outputs of the proposed triple-layered CPG. These figures show that the angular velocity and the angular acceleration of the joints only have slightly abrupt changes during the locomotion transition process. The abrupt changes are not enough to damage the motors and affect the kinetic stability of snake-like robots.

The continuity of the outputs of the MNL when the parameters are modulated. (a), (e), and (i) The amplitude of the MNL motoneurons is tuned at t = 5 s. (b), (f), and (j) The frequency of the RGL and PGL interneurons is tuned at t = 5 s. (c), (g), and (k) The offset of the MNL motoneurons is tuned at t = 5 s. (d), (h), and (l) The phase bias of the RGL and PGL interneurons is tuned at t = 5 s. The four parameters are modulated through the sigmoid function. RGL: rhythmic generator layer; PGL: pattern generator layer; MNL: motoneuron layer.
Simulation results and discussion
The models of the proposed triple-layered CPG are built in the MATLAB [version Matlab 2015b]/Simulink. The dynamical model of the snake-like robot given in Figure 2 is built using the MSC Adams. The co-simulation environment between the MATLAB/Simulink and MSC Adams is implemented through the Adams/Controls module. In this section, the efficiency and the smooth transition of the proposed triple-layered CPG are discussed.
3D locomotion of snake-like robot
Four locomotion simulations of the snake-like robot have been done to evaluate the performance of the proposed triple-layered CPG-based controller. The parameters of the triple-layered CPG for the four different 3D locomotion are listed in Table 1. The intrinsic frequencies ωmi of the RGL and PGL interneurons are both set as 0.3. The coupling weight wmij between the ith and jth interneurons is set as 80. The time constant τ of the motoneurons is set as 1, and the proportionality constants α and β are set as 8 and 2, respectively. The outputs of the proposed triple-layered CPG for controlling the four different 3D locomotions are shown in Figure 11. The corresponding snapshots of the simulation process in Adams are presented in Figure 12. It can be seen that the snake-like robot could easily perform the 3D locomotion.
The control parameters of the proposed triple-layered CPG in the 3D locomotion simulation.a
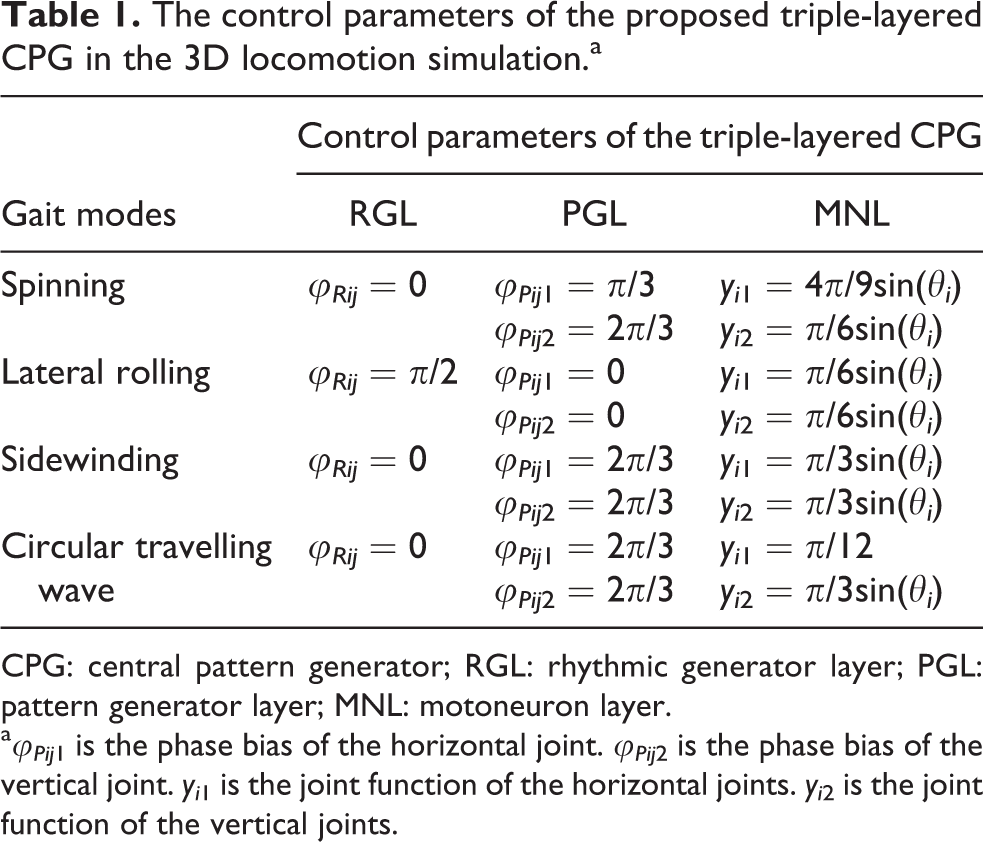
CPG: central pattern generator; RGL: rhythmic generator layer; PGL: pattern generator layer; MNL: motoneuron layer.
a ϕPij 1 is the phase bias of the horizontal joint. ϕPij 2 is the phase bias of the vertical joint. yi 1 is the joint function of the horizontal joints. yi 2 is the joint function of the vertical joints.
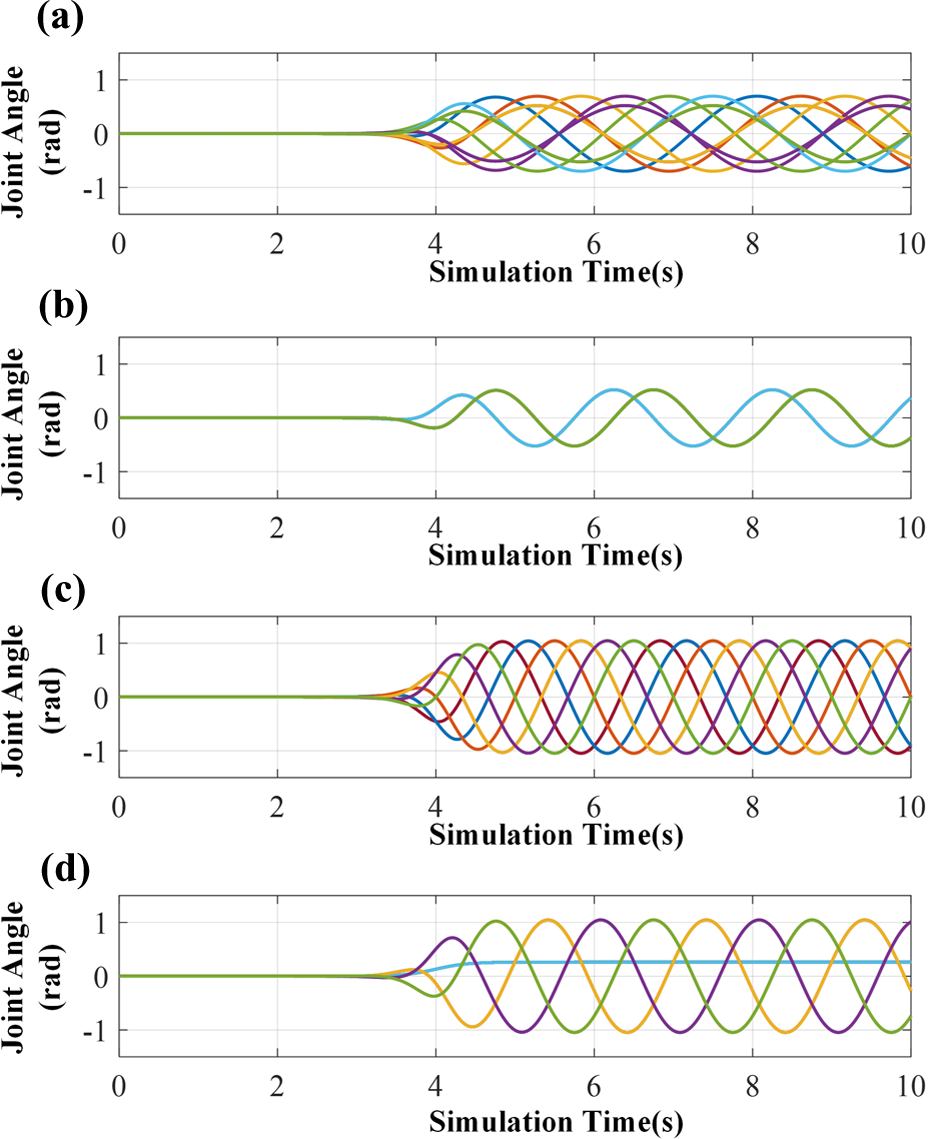
The outputs of the proposed triple-layered CPG. (a) The spinning locomotion of the snake-like robot. (b) The lateral rolling locomotion of the snake-like robot. (c) The sidewinding locomotion of the snake-like robot. (d) The circular travelling wave locomotion of the snake-like robot. CPG: central pattern generator.

The co-simulation of the snake-like robot with the proposed triple-layered CPG-based controller. (a) The snake-like robot performs the spinning locomotion. (b) The snake-like robot performs the lateral rolling locomotion. (c) The snake-like robot performs the sidewinding locomotion. (d) The snake-like robot performs the circular travelling wave locomotion. CPG: central pattern generator.
As shown in Figure 13, the COM positions of a mechanical part of the snake-like robot in the horizontal plane (ΣXOZ) have been recorded during the simulation processes. The average angular velocity of the spinning locomotion is 13.7° s−1. Figure 13(a) presents that the rotation center of the snake-like robot is almost fixed. The average velocity in the x-axis of the lateral rolling locomotion is nearly 41 mm s−1, and the average velocity in the z-axis is 3.73 mm s−1. The moving direction has slight deflection. Therefore, the sensory feedback should be integrated to modulate the locomotion. The average velocity is almost 210.0 mm s−1 when the snake-like robot performs the sidewinding locomotion. The efficiency of the sidewinding locomotion is highest. The average velocity of the circle travelling wave locomotion is only 14.89 mm s−1. The velocity of the snake-like robot can be modulated through changing the intrinsic frequency of the interneurons in both RGL and PGL. Therefore, the proposed triple-layered CPG is evaluated to be effective for controlling the 3D locomotion through the simulation results.

The trajectories of the snake-like robots in the locomotion simulations. (a) The snake-like robot performs the spinning locomotion. (b) The snake-like robot performs the lateral rolling locomotion. (c) The snake-like robot performs the sidewinding locomotion. (d) The snake-like robot performs a circular travelling wave locomotion.
Smooth locomotion transition
The smooth locomotion transition from the lateral rolling locomotion to the sidewinding locomotion was simulated and analyzed in this section. The parameters of the proposed triple-layered CPG set in the simulation are listed in Table 2. In order to limit the torques of each joint, the transition time is set as 3 s. The outputs of the proposed triple-layered CPG are illustrated in Figure 14. The locomotion of the snake-like robot in the simulation is divided into three stages, that is, the lateral rolling locomotion, the locomotion transition process, and the sidewinding locomotion. The locomotion transition process started from 8.5 s to 11.5 s. The outputs of the proposed triple-layered CPG smoothly converged to the desired joint trajectories, but the outputs do not satisfy the constraint of the serpenoid curve.
The parameters of the proposed triple-layered CPG in the locomotion transition simulation.
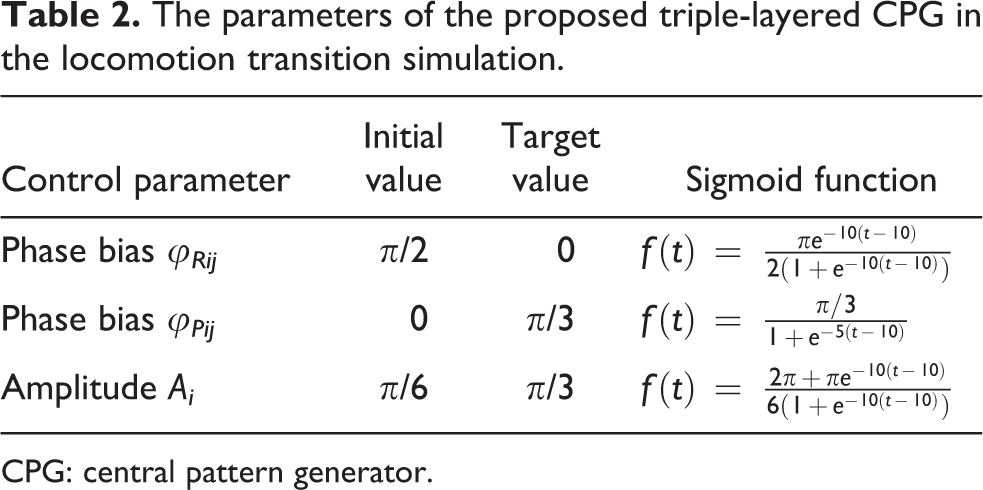
CPG: central pattern generator.

The outputs of the proposed triple-layered CPG when the locomotion mode is switched. CPG: central pattern generator.
The snapshots of the simulation are recorded and presented in Figure 15. The locomotion mode of the snake-like robot in the simulation is switched successfully. However, the motion direction of the snake-like robot is changed. As presented by Dai et al. and Gong et al., 44,45 the snake-like robot can perform reversal and differential turning through modulating the amplitude and the phase bias of the CPG. During the simulation process, the torques of the first and third joints of the snake-like robot were recorded. The corresponding results are presented in Figure 16. It can be seen that the torques of the joints of the snake-like robot do not change abruptly. Therefore, the smooth locomotion transition of the proposed triple-layered CPG has been evaluated to be efficient by the simulation results.

The snapshots of the locomotion transition are recorded in the simulation.

The torques of the joints of the snake-like robot are recorded during the locomotion transition process.
Conclusion and future work
This article presents a novel triple-layered CPG for controlling the 3D locomotion of snake-like robots. The proposed triple-layered CPG includes a rhythm generation layer, a pattern generation layer, and a motoneuron layer. The interneurons and the motoneurons are, respectively, modeled by the Kuramoto nonlinear oscillator and rhythmic DMP. The proposed triple-layered CPG can easily generate the phase-coordinated multiple DOFs locomotion control signals of snake-like robots. Firstly, the effects of the parameters on the outputs of the proposed triple-layered CPG are analyzed numerically. Secondly, the smooth locomotion transition process of the triple-layered CPG is analyzed. A sigmoid-based parametric transition function is applied to change the parameters of the CPG. Finally, several locomotion simulations have been done to evaluate the performance of the proposed triple-layered CPG and smooth locomotion transition. The results show that the proposed triple-layered CPG is useful for improving the mobility and adaptability of snake-like robots, and the locomotion transition is continuous and smooth.
Future work will focus on the path planning of the snake-like robot by applying the triple-layered CPG integrated with sensory feedback. The snake-like robot with compliant mechanism could passively adapt to the rough environments. Therefore, the compliant mechanism and control strategy of CPG will be focused.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported in part by the Natural Science Foundation of China under Grant 51675259, the Natural Science Foundation of Jiangsu Province under Grant BK20170763, the Jiangsu Province Universities Natural Science Research Program 16KJB460013, the Scientific Research Funds of Nanjing Institute of Technology YKJ201611, the Jiangsu Provincial Key Laboratory of Remote Measurement and Control Technology 2242015k30005, and the Jiangsu Provincial Projects of 333 Talents Engineering.