
Abstract
This article presents a robust stabilizing control for nonholonomic underwater systems that are affected by uncertainties. The methodology is based on adaptive integral sliding mode control. Firstly, the original underwater system is transformed in a way that the new system has uncertainties in matched form. A change of coordinates is carried out for this purpose, and the nonholonomic system is transformed into chained form system with matched uncertainties. Secondly, the chained form system with uncertainties is transformed into a special structure containing nominal part and some unknown terms through input transformation. The unknown terms are computed adaptively. Afterward, the transformed system is stabilized using integral sliding mode control. The stabilizing controller for the transformed system is constructed which consists of the nominal control plus some compensator control. The compensator controller and the adaptive laws are derived in a way that the derivative of a suitable Lyapunov function becomes strictly negative. Two different cases of perturbation are considered including the bounded uncertainty present in any single control input and the uncertainties present in the overall system model of the underwater vehicle. Finally, simulation results show the validity and correctness of the proposed controllers for both cases of nonholonomic underwater system affected by uncertainties.
Keywords
Introduction
In recent years, there has been an increasing interest in design and implementation of robust control laws for underwater vehicles. The underwater vehicles are useful in performing vital roles in monitoring of coastal shallow water regions, environmental surveying, offshore oil installations, undersea cable/pipeline inspection, oil/mineral explorations, homeland security, and many other underwater tasks. 1 –11 The survey papers 1 –3 provide a useful and relevant overview on the control of autonomous underwater vehicles (AUVs). In the study by Bi et al., 4 a tracking control of under-actuated AUV was designed in the presence of unknown ocean currents, whereas position-based control of underwater robotic system for maintaining position in the presence of ocean currents was presented by Kim et al. 5 A hybrid control for dynamic positioning of an under-actuated marine system was proposed by Panagou and Kyriakopoulos, 6 and a second order sliding mode controller was designed for AUV in the presence of unknown disturbances in the study by Joe et al. 7 Neural network–based control technique for controlling the trajectory of AUVs was presented by Eski and Yidirim. 8 A backstepping-based adaptive tracking control design for under-actuated AUVs has been reported in the study by Ghommam and Saad. 9 In the study by Akcakaya and Sumer, 10 a robust control of variable speed AUV was designed. Also, point stabilization for an underwater vessel in the presence of sea currents was proposed by Zaopeng et al. 11
Nonholonomic chained form systems
Owing to the presence of nonholonomic constraints, the kinematic model of AUVs is best described by

where
For the purpose of analysis and control design, it is extremely helpful to first transform the original system into some canonical form via state–input transformation. One such canonical form is the chained form first introduced by Murray and Sastry. 17 Many nonholonomic systems can be converted locally or globally into the chained form under coordinate/input transformation. 13 Thus, the chained form is frequently used as a canonical form in the control and analysis of nonholonomic mechanical systems. In recent years, much effort has been put in for tracking and stabilizing control of chained form systems. 14 –21 Detailed progress on higher order nonholonomic chained system control has been presented by Huang et al. 18
Adaptive integral sliding mode
The control problem becomes further complicated whenever various uncertainties influence the nonholonomic mechanical systems. 22 –24 A simple, rather useful, approach to control nonholonomic uncertain systems is the sliding mode control (SMC). The SMC has attracted the attention of many researchers due to its simplicity, fast response, and robustness to external noise and parameter variations. 24 –29 The properties of SMC just depend upon the design of the switching surface and have nothing to do with the external interferences. 29 Some recent practical applications of SMC include control of steerable needles, 30 nonlinear control of an unmanned agricultural tractor, 31 and impedance control of a piezoelectric microgripper. 32
The two phases of SMC are the reaching and the sliding phase. During the sliding phase, the system trajectory is forced to slide on the sliding surface. In this case, the system response solely depends on the parameters of the surface and remains insensitive to external disturbances and variations of system parameters. However, during the reaching phase, the system has no such insensitivity property. Therefore, insensitivity to external disturbances cannot be ensured for the whole system response. 29 Also, SMC is not useful in real-world applications because of the presence of chattering phenomenon. The integral sliding mode control (ISMC) is used to resolve the inherent chattering problem of the sliding mode. The ISMC combines the nominal control that stabilizes the nominal system and a discontinuous control that rejects the uncertainty. Various control methodologies are used in conjunction with SMC to garner the combined benefits. These include backstepping, 9,28 adaptive, 26 neural networks, 33 and the fuzzy control. 34 The neural networks have some drawbacks including the difficulty in selecting appropriate network and slow convergence to the equilibrium point. Similarly, the major drawback of fuzzy logic control is the difficulty in getting fuzzy rules and membership functions. Also, backstepping techniques are difficult to implement on nonholonomic mechanical systems, whereas the adaptive technique in combination with ISMC guarantees the robustness of system trajectory in the whole state space. 24,26
This article presents a robust method for stabilization of nonholonomic AUVs affected with uncertainties. The methodology is based on adaptive ISMC. The importance of this research is further highlighted by the fact that the proposed methodology is general and can be applied to other nonholonomic mechanical systems such as wheeled mobile robots, helicopters, vertical take off and landing aircrafts, surface vehicles, and so on. At the same time, the proposed methodology provides robustness for the whole state space and the chattering problem is significantly reduced. Firstly, the original system is transformed to a perturbed chained form system. Secondly, the perturbed chained form system is further transformed into a special structure containing nominal part and some unknown terms through input transformation. The unknown terms are computed adaptively. The transformed system is then stabilized using ISMC. The stabilizing controller for the transformed system is constructed which consists of the nominal control plus some compensator control. The compensator controller and the adaptive laws are derived in such a way that the derivative of a suitable Lyapunov function becomes negative in the strict sense. Finally, the simulations show validity of the proposed control algorithm for the original underwater vehicle model with two different cases of uncertainties.
Problem formulation
Kinematic model of underwater vehicle
Consider a model of an underwater vehicle as shown in Figure 1. The two frames of reference used for deriving the AUV model include the inertial frame (O − XYZ) and the local frame (c − xyz). The local frame is attached to the vehicle at its center c. Motion of the vehicle is described by using six coordinates, three for position (x,y,z) and three for the vehicle orientation

Model of an underwater vehicle.
The velocity of underwater vehicle is represented by v and its components along the x,y, and z axes are given by 35

The relationship between the angular velocity
After combining equations (2) and (3) and using a modified set of state and control variables as

or in compact form as

Case studies
Two different cases of uncertainties are considered in this article. Robust stabilizing control algorithm is developed for both cases of uncertainties. Details of the uncertainties are as follows.
Case 1
Here, it is assumed that the perturbation is present only in one control input. Consider the above system (4) and choose

where

and
Now, u4 is assumed to be perturbed as
Case 2
In this case, the perturbation is considered to be present in the overall system model. Therefore, the underwater vehicle model (5) with some nonlinear uncertainties can be written as

where
The control problem
Given a desired set point
Also, it is assumed without any loss of generality that
Some assumptions
For stabilizing control problem, the nonholonomic underwater systems described by (4) must satisfy the following assumptions: Assumption 1: The vector fields Assumption 2: The nonholonomic system satisfies the Lie algebra rank condition (LARC) for accessibility,
36
that is, the Lie algebra,
The kinematic model of AUV given by (4) satisfies the above two assumptions, that is, the vector fields
In order to prove the aforementioned assumption 2, it is sufficient to compute the Lie brackets given below


It is now straightforward to verify that if the system motion is restricted to the manifold M, then

Conversion into chained form
The original system is, first of all, transformed into a perturbed chained form system. Then, the perturbed chained form system is further transformed into a special structure containing nominal part and some unknown terms through input transformation.
Now using the following state transformation

and input transformation

where
the system (5) can be written in chained form as

Case 1
The control problem is solved by first converting the system (5) into the following chained form system containing the uncertainty term with v4. The system is, therefore, complicated by the presence of a bounded disturbance affecting the last equation

where
Case 2
Here, consider system (6) along with model level perturbation as

where

and
According to Liang and Jianying,
24
if
where the perturbations are
Case Study 1: Stabilizing algorithm for perturbed control input
The original underwater vehicle system (5) is, first of all, transformed into a perturbed chained form system (10). Then, the perturbed chained form system is further transformed into a special structure containing nominal part and some unknown terms through input transformation. The unknown terms are computed adaptively and the transformed system is stabilized using ISMC. The stabilizing controller for the transformed system is constructed which consists of the nominal control plus some compensator control. Step-by-step details of the stabilizing algorithm are presented in the subsection.
Control algorithm
Step 1: Choose

Step 2: After some manipulation, the above system (13) can be written as

where
Step 3: Now, assume that F3 and F5 are unknowns and can be computed adaptively. Let
Then, system (14) can be written as

Step 4: The nominal system for (15) becomes

Now, choose a sliding surface for (16) as

and

Then, by taking
Step 5: Select the sliding surface for (15) as
Then

Step 6: Now, by choosing a Lyapunov function
Since

Therefore, by using

we have
From this, we conclude that
Simulation results
Figures 2 and 3 show simulation results for underwater vehicle without and with uncertainty in the control input. The simulations are carried out for the same initial conditions
System trajectory without any uncertainty. (a) System states corresponding to initial condition

System trajectory with uncertainty. (a) System states corresponding to initial condition
Case study 2: Stabilizing algorithm for perturbed system model
Again the original system (6) is, first of all, transformed into a perturbed chained form system (12). Afterward, the perturbed chained form system is further transformed into a special structure containing nominal part and some unknown terms through input transformation. Step-by-step details of the proposed algorithm are presented next in the subsection.
Control algorithm
Step 1: After decomposing unknown constants into estimated values and errors in estimated values, the system (12) can be rewritten as

By choosing

Step 2: After some manipulation, the above system (18) can be written as
where
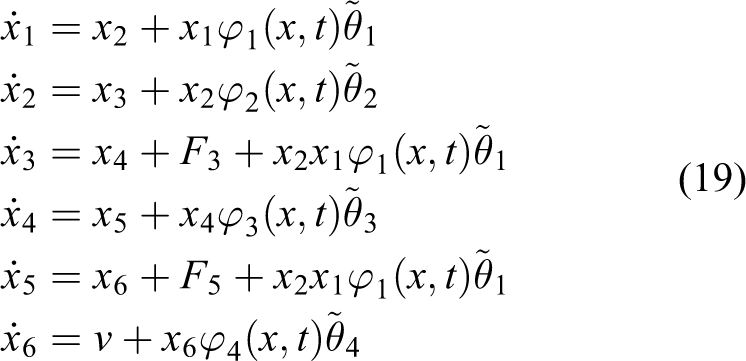
Step 3: Now, assume that F3 and F5 are unknown and can be computed adaptively. Let
Then, system (19) can be written as

Step 4: The nominal system for (20) is given as

Select the sliding surface for (21) as

then

Therefore, by taking
Step 5: Choose the sliding surface for (20) as
Therefore

Step 6: By choosing a Lyapunov function
Since

Therefore, by using

we have
From this, we conclude that
Simulation results
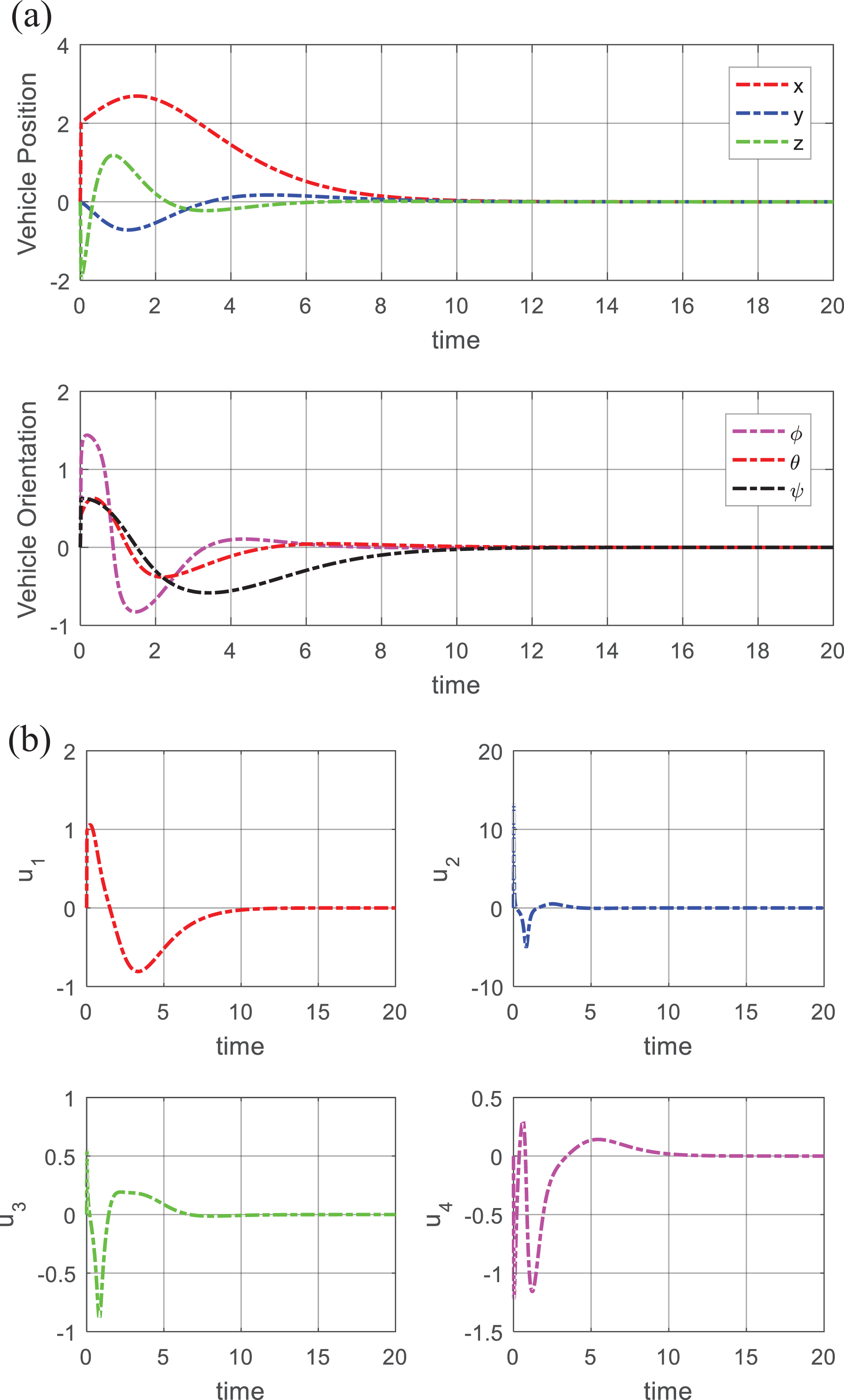
Figures 4 and 5 show simulation results for underwater vehicle model affected with uncertainties. The simulations are carried out for two different initial conditions

System trajectory with perturbation in system model. (a) System states corresponding to initial condition

System trajectory with perturbation in system model. (a) System states corresponding to initial condition
(0, 1, −1, π/5, π/8, π/6)
(1, −1, 1, π/6, π/10, π/8)
Also, following sinusoidal/nonlinear functions are used for the known functions in the perturbations.




The unknown parameters for Figure 4 are chosen as
Conclusion and future work
An adaptive ISMC-based robust control algorithm for perturbed underwater vehicle is presented in this research. Firstly, the system is transformed into a special structure containing a nominal part and an unknown part through input transformation. The terms of the unknown part are computed adaptively. The transformed system is stabilized using ISMC. The stabilizing controller for the transformed system is constructed which consists of the nominal control plus a compensator control. The derivation of compensator controller and the adaptive laws for the unknown terms are based on the Lyapunov theory. The proposed methodology is applied on two different types of perturbed underwater vehicle.
The importance of research is further highlighted by the fact that the proposed methodology is general and can be applied to other nonholonomic systems. Also, the proposed scheme ensures robust stabilization for the whole state space along with chattering suppression. Application of other methods in conjunction with SMC has major disadvantages. The neural networks have the drawbacks of difficulty in selecting appropriate network and slow convergence to the equilibrium point. Similarly, the major drawback of fuzzy logic control is the difficulty in getting fuzzy rules and membership functions.
Future work will concern development of robust algorithm for underwater vehicle or general nonholonomic mechanical systems that are affected with unmatched uncertainties. Also, formation control of AUVs will be studied, as cooperative control of AUVs and its real-world implementation is an active area of research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.