
Abstract
This article studies a time-varying version of the so-called containment problem with collision avoidance for multiagent systems. The proposed control strategy is decentralized, since agents have no global knowledge of the goal to achieve, knowing only the position and velocity of a subset of agents. This control strategy allows a subset of mobile agents (called leaders) to track a prescribed trajectory while they achieve a time-varying formation. Simultaneously, another subset of mobile agents (called followers) converge exponentially to the region bounded by the leaders. For the collision avoidance, we added a repulsive vector field of the unstable focus type to the time-varying containment control law. Formation graphs are used to represent interactions between agents. The results are presented for the front points of differential-drive mobile robots. The theoretical results are verified by numerical simulation. Additionally, an experimental case study is presented.
Keywords
Introduction
Multiagent systems are defined as bundles of autonomous robots coordinated to accomplish cooperative tasks. In recent years, the study of multiagent systems has gained special interest, because these systems can achieve tasks that would be hard or impossible to achieve by agents working individually. Multiple agents can solve tasks working cooperatively, making them more reliable, faster, and cheaper than it is possible with a single agent. 1
Applications of multiagent systems include the transport and manipulation of large objects, localization, exploration, and motion coordination. 1,2 Two main areas of research in the motion coordination are the formation control, where the goal is to achieve a desired pattern defined by relative position vectors, and the marching control, where the goal is to track a preestablished trajectory while the agents maintain a desired formation.
Within motion coordination, the so-called containment problem has attracted the attention of researchers over recent years. The problem is that a group of mobile agents (called leaders) track a predetermined trajectory while another group of agents (called followers) remain within the region determined by the leaders. 3 The containment problem has several practical applications. For instance, when a group of robots secure a zone to remove hazardous material, they should not leave the area, as they can contaminate the surroundings. Also for navigation of a group of robots, when only a subgroup of them (leaders) has the ability to detect obstacles, while the rest (followers) has no such ability. For the followers, a way to navigate safely is moving within the region delimited by the leaders. 4
In the literature, there is a number of works related to the containment problem. The papers 5,6 consider stationary leaders, so that their initial positions form a desired geometric pattern static all the time. In the study by Dimarogonas et al., 7 the formation control problem for the leaders is considered. Elsewhere, 3,4,8 dynamic leaders are considered. A trajectory is assigned to each leader, but they are placed in such a manner so as to form a geometric pattern to which the followers must converge. In studies by Chen et al. and Dong et al., 9,10 the containment problem is presented, considering a swarm-type behavior of the agents, using a potential function approach. Paper 11 presents the containment problem both in discrete and in continuous cases. Finally, in the work by Cao et al., 12 a distributed containment control is studied for both stationary and dynamic leaders.
Another ubiquitous problem in all areas of motion coordination that is scarcely considered in the literature is the posible collision between agents when they attempt to reach a desired position. In the study by Qianwei et al., 13 a mechanism for collision avoidance under central control mode (traffic control type) is presented. Elsewhere, 14 –16 navigation functions and artificial potential functions are used to avoid collisions between agents. Works 17 –20 address the formation control problem without collisions using discontinuous vector fields.
The time-varying formation problem has been studied elsewhere. 21 –24 The time-varying formation control can be applied as the solution to complex motion coordination problems. In our case, the time-varying formation allows trajectory tracking with formations oriented to the heading angle of a leader robot as well as changes in the physical dimensions of the formations. The time-varying formation is composed of a predefined static formation which is transformed by a rotation matrix and a scaling matrix.
The interaction topology between agents is modeled by formation graphs, where each agent is represented by a vertex and the sharing of information between agents is represented by an edge. The control strategies designed in this work are presented for differential-drive mobile robots. This kind of mobile robots is commonly chosen as test bed because of its simplicity and commercial availability. Differential-drive mobile robots present interesting challenges because they possess nonholonomic restrictions; and in spite of having a simple kinematic model, it presents singularities. For this reason, the stabilization of such kind of mobile robots has been studied for several years by researchers from diverse viewpoints.
The goal of this article is to design a decentralized control strategy that allows trajectory tracking with a time-varying formation of a subset of agents called leaders, while another subset of agents called followers remain inside the region formed by the leaders (a time-varying version of the containment problem). In the subset of leaders, the main leader is responsible of the trajectory tracking, while the secondary leaders reach a time-varying formation with respect to the main leader.
The main contribution of this article is the implementation of the containment problem with dynamic leaders under marching, with time-varying formation control avoiding collisions between agents. The collision avoidance strategy is based on previous works. 25,26 The main difference is that in this work we consider the formation tracking problem. Moreover, in this work we use bounded control strategies based on sigmoid functions instead of normalizing them, adding a repulsive vector field.
In a previous work, 27 we studied the particular case of leader-centered formation graphs. In this work, the general case is presented, where the interaction between secondary leaders is represented by arbitrary formation graphs. Additionally, we present an experimental case study.
Preliminaries
Kinematic model of differential-drive mobile robots
Let

where vi is the longitudinal velocity of the middle point of wheel axis of the ith robot, wi its angular velocity, and θi the heading angle with respect to the X-axis. If the position ξi is taken as output of the system 1, the so-called decoupling matrix becomes singular. For this reason, to avoid singularities in the control law, it is common to study the kinematics of a point αi of the wheels axis. According to Figure 1, the coordinates of point αi are given by

where

where

Kinematic model of the differential-drive mobile robot.
Defining auxiliary control variables

where

The auxiliary control variables
Basic graph theory
A set of vertices
A set of edges
A set of labels

where Δ is the degree matrix defined by

where

The set
Let

where
In the rest of this article, we make the following standings assumptions:
For further details about formation graphs, Laplacian, and its properties, the reader is referred to Fax and colleagues. 28 –30
Mathematical miscellaneous
The real part of each eigenvalue of A is positive.
All principal minors of A are positive.
A −1 exists and the elements of A −1 are nonnegative.
Problem statement
In order to define the problem statement, let us introduce some notation:
Let
The desired relative position of the ith secondary leader within the desired time-varying formation is given by

where Cji
(t) is a time-varying position vector between the agents i and j and will be specifically defined in the next section. The time derivative of Cji
(t) satisfies
The goal of this work is to design a decentralized control law Asymptotic tracking of a prescribed trajectory by the main leader agent (marching control), that is
Asymptotic time-varying formation by the secondary leader agents (time-varying formation control), that is
Convergence of the follower agents to the convex hull formed by the leaders (containment control), that is
Collision avoidance among all agents, that is, all agents in the system remain at a distance greater than or equal to a predefined minimum distance d from each other, that is




Control strategy for containment with time-varying formation
Time-varying position vector
To maintain a formation (by the secondary leader agents) oriented to the direction of the main leader agent and rescale the formation, we use a time-varying position vector given by

where cji
is a static position vector corresponding to the desired formation,

respectively. The time-derivative of (9) is given by

where

Control strategy and convergence analysis
For containment under marching with time-varying formation, we propose a control law for the leaders and followers, based on the fundamental consensus algorithm, 34 given by



where m(t) is the desired trajectory,
The first main result of this article is the following:
The main leader Rn
converges to the desired marching trajectory, that is, The followers converge to the convex hull formed by the leaders, that is,

where
where
To begin with, we have to show that
Define the errors of the system as



In matrix form, the system errors are given by

where

We propose a Lyapunov function candidate given by

and evaluating the time derivative along the trajectories of the system, we have

so the errors converge asymptotically to 0.
Part 2. Rewrite the system errors (20) in the form

where

where
Solving for the position of follower agents αF (t) of Equation (24), we have

Since

where η = 1,
Collision avoidance strategy
Once the control strategy for containment with time-varying formation has been designed, and having made the corresponding convergence analysis, we now address the problem of collision avoidance between agents by designing a complementary control law based on repulsive vector fields depending on the distance among agents.
The distance between any pair of agents is given by

where d is the minimum distance allowed between agents. In order to avoid collisions between agents, we propose repulsive vector fields given by
where ε > 0 is a design parameter to be defined later. The vector fields are proposed in such a way that, for agent Rr there exists an unstable counterclockwise focus, centered at the position of the other agents.
We consider the following assumption:
Finally, the control strategy for the agents is given by



To analyze the relative distance among any pair of agents, r and s, we define the variables
In order to present our second main result, we need to establish the following technical lemma.

where

This concludes the proof.
Now, we can state our second main result. First, we consider the scenario when only two agents are in risk of collision. Based on this, we state the following theorem which is essential, since it considers the simplest case of risk of collision.

The dynamics of prs and qrs is

To determine the behavior under the action of the repulsive vector fields, we use the positive definite function

whose time derivative is given by

The time derivative of (31) is calculated and it is evaluated along the trajectories of the closed-loop system
Note that

Solving for ε and taking into account that
In order to generalize the problem, we now consider the scenario where three agents are at risk of collision, that is, agent r is at risk of collision against agents s1 and s2.

The dynamics of p rs1, q rs1, and p rs2, q rs12 are

We use the positive definite function

whose time derivative is given by

where

In this scenario, agents s1 and s2 can be positioned at any point of the circumference of radio d around the agent r, considering that, from theorem 2, they must remain at a distance greater than or equal to d between them. The worst case occurs when the agents s1 and s2 are uniformly distributed over the circumference of radio d. Thus,
Geometrically, the most general scenario occurs when an agent r is surrounded by other six agents. Now, we can state our second main result.
Numerical simulation
The results of a numerical simulation using the control strategy given by (27) to (29) are shown below. For the simulation, we considered eight unicycle-type mobile robots, where the point αi to control is located 0.15 m ahead the midpoint of the wheels axis. The formation graph employed in the simulation is shown in Figure 2.

Formation graph for the simulation.
The parameters used in the simulation are
The minimum allowed distance between agents is d = 0.2 m and the parameter ε was set to
Figure 3 shows the motion of the agents in the plane. The initial position of the agents is indicated with an “x” and positions in times t = 0.38,12,22,32,42,52,62 and 72 s are represented with a circle “o.” It is observed how the main leader follows the desired trajectory while the secondary leaders achieve a time-varying formation and the followers converge to the convex hull formed by the leaders. Furthermore, there is no collision between agents.

Trajectories of the agents in the plane.
Figure 4(a) and (b) shows the errors of the follower and the leaders, respectively. Such errors converge to 0. The required control signals are shown in Figure 5(a) and (b).

Errors of the agents of the system.
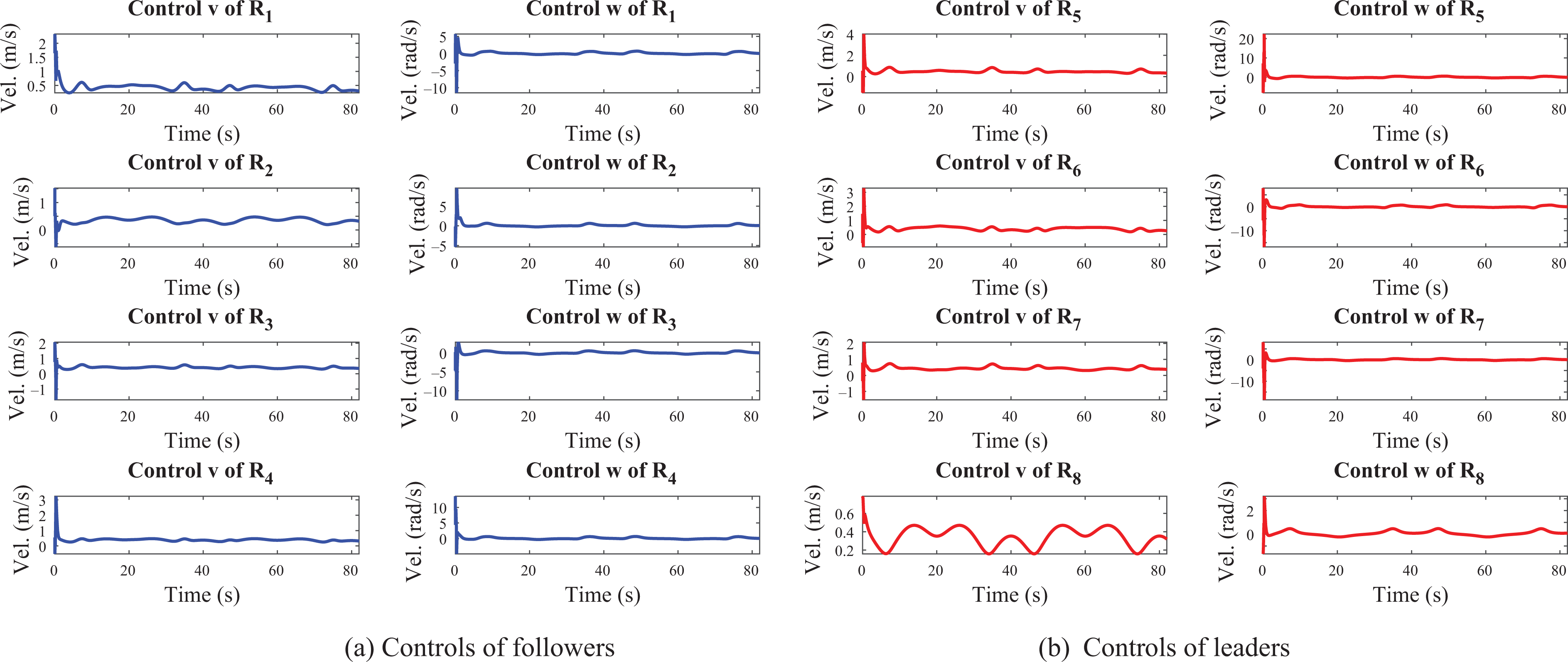
Controls of the agents of the system.
Figure 6(a) depicts all the posible distances between agents. The distances between any pair of agents is always greater than or equal to the predefined distance d = 0.2. To better appreciate Figure 6(a), a zoom to the distances between the agents that are at risk of collision is presented in Figure 6(b).

Distances among agents of the system.
Experimental case study
To validate the theoretical results, the control strategy is implemented on the experimental platform shown in Figure 7. The platform is composed of four AmigoBot differential-drive mobile robots manufactured by MobileRobots Inc (www.mobilerobots.com). Each robot has placed on top a set of infrared markers whose centroid coincides with the middle point of the wheel axis. The position and orientation of each robot are obtained by an OptiTrack vision system. The vision system consists of 12 Flex 13 cameras manufactured by Natural Point and the software Motive: Tracker [version 1.0, eference http://optitrack.com/products/motive/tracker/]. The control strategy is computed in Visual C++ using the Aria libraries designed for communication and management of the AmigoBot robots.

Experimental platform.
The point αi
to be controlled is located 0.15 m ahead the middle point of the wheel axis of each robot. The formation graph employed in the experiment is shown in Figure 8. The parameters used in the experiment are km
= 1, kf
= 2, and kc
= 3. The desired marching trajectory is a Lemniscate of Gerono given by

Formation graph for the experiment.
Figure 9 shows a comparison between a numerical simulation and a real-time experiment of the motion of the agents in the plane. Simulation results are dashed lines and experimental results are solid lines. The initial position of the agents are indicated with an x and positions in times

Trajectories of the agents in the plane (experiment).

Trajectories of the agents in different times.
Figure 11(a) and (b) shows the errors of the follower and the leaders, respectively, of both the numerical simulation and real-time experiment. Such errors converge to 0. The required control signals are shown in Figure 12(a) and (b).
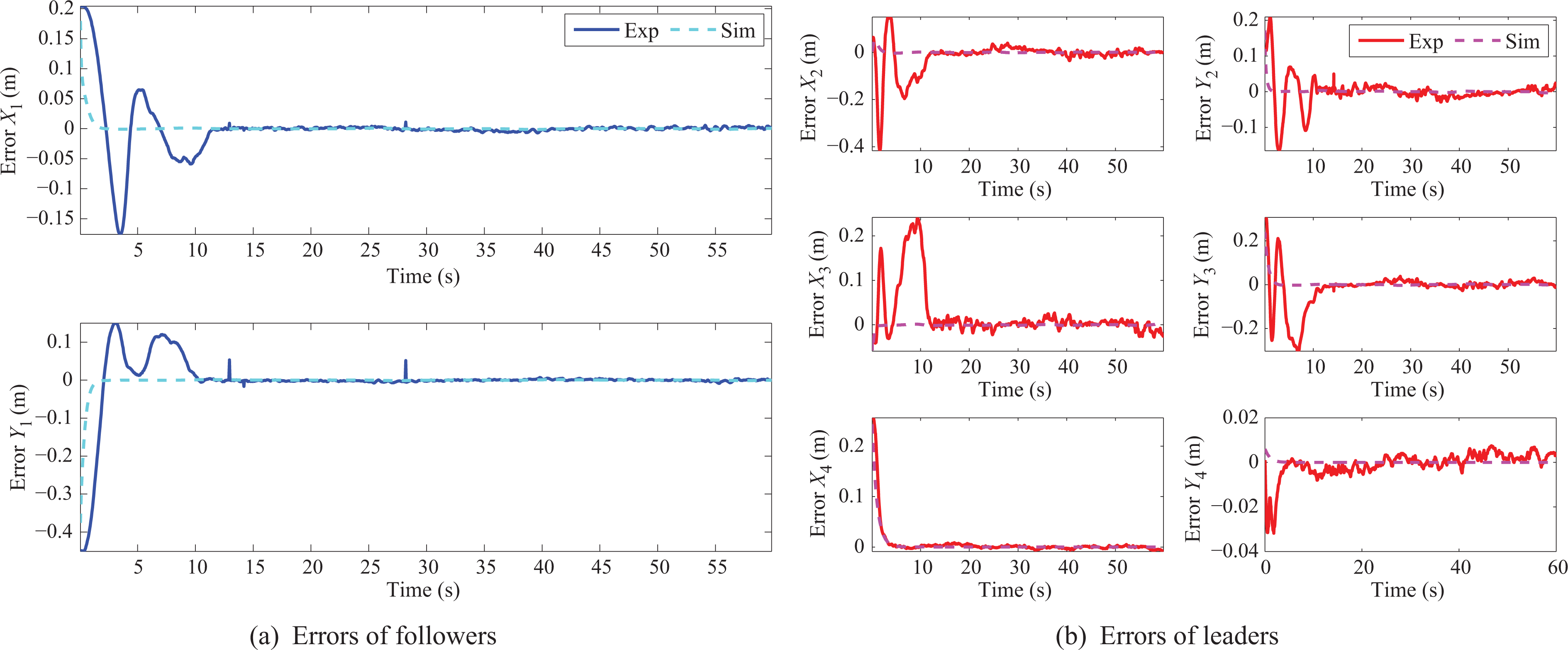
Errors of the agents of the system.

Controls of the agents of the system.
Conclusions and future work
This article presents a time-varying version of the containment problem with collision avoidance for multiagent systems, where the agents are differential-drive mobile robots. We propose a decentralized control strategy which ensures that the followers converge to the convex hull formed by the leaders, while the latter converge to a desired marching trajectory, moving in a time-varying formation. Furthermore, collision avoidance between agents is achieved. We use formation graphs to represent interactions between agents. As shown in numerical simulations and real-time experiments, the goals are achieved and system errors converge to 0.
As future work, it is proposed to control the midpoint of wheel axis of the differential-drive mobile robots. It is also proposed to include a strategy for obstacle avoidance. It is also intended to conduct further experiments considering a time-varying scaling factor placing the robots so that there is a risk of collision between them.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.