
Abstract
The incompletely restrained cable-suspension swing system driven by two cables is introduced in this article. Based on wrench of forces theory and Lagrange’s equation of first kind, the static and dynamics models of incompletely restrained cable-suspension swing system driven by two cables are established, respectively. In order to obtain an intuitive understanding of the trajectory analysis, a dynamics model consisting of governing equation and geometric constraint conditions which is a set of the mixed differential-algebraic equation in mathematics is established. A typical feedback controller and an inverse model were set up to estimate the driving function. The effective workspace, which is used to guarantee an efficient swing process, mostly depends on the geometrical shape rather than the volume itself which was calculated by trajectory analysis. In order to estimate system features and ensure a limited range of tension in underconstrained spatial cable system, the probable location of unbalanced loading was evaluated by pointwise evaluation techniques during normal work.
Introduction
A variety of applications of cable-driven parallel mechanisms (CDPMs) have been a hot topic of exploration and extensively studied since the early 90s. Due to low mass ratio and great axial carrying capacity, 1 CDPM is much thinner and lighter than most conventional mechanical components. It has negligible inertia which is a good choice for widespread use, such as high speed, 2 haptic interface, 3 rescue aid, 4 heavy load transportation 5 and mine hoisting. 6 CDPM is suitable for lifting, positioning large heavy load and digging a vertical shaft. Based on the degree of freedoms (DOFs) and cable number, CDPM can be roughly classified into two categories, which are the fully constrained cable-driven mechanism 7 and underconstrained. 8
Crane is the simplest version of the underconstrained CDPMs with one cable and it’s an ideal lifting appliance in traffic transportations, factory and building site. 9,10 Compared with fully constrained CDPM, cable suspended mechanism has low power consumption with fewer actuators. However, the control of it is more challenging. 11,12 There are extensive research related to kinematics and dynamics modelling, 13,14 stiffness analyses, 15 dynamically feasible trajectories, 16 the static 17 and accuracy control of cable-driven end-effector and so on. Model predictive control is designed to control the position and to improve tracking performance. 18,19 The static workspace for CDPM refers to the set of postures when the end-effector can be satisfied with static equilibrium conditions under positive tension.
With the development of large-scale equipment and test, it becomes necessary to build a novel large swing platform. Incompletely restrained cable-suspension swing system driven by two cables (IRCSWs2), similar with crane, controls the suspended platform by two cables and is used to test equipment in swing environment which occurs on much transportation, such as aerial photography, submarines on shallow water and so on. It was reported that sometimes faults will be caused in a marine computer monitoring system and people were trapped after the elevators went out of action with the special swing working conditions and so on. The shape of suspended platform’s workspace depends on the typical parameters, such as cable stiffness, and unbalanced loading on suspended platform, which guides the detailed design of suspended platform structure.
The set of working points, reached by the end-effector, is called a feasible workspace by controlling the voltage of actuators. 20,21 One of the areas, which is studied in the research, is feasible workspace analysis based on the wrench analysis in static or quasi-static conditions. 22,23 External wrenches provide a physical controllable workspace on the suspended platform. Static equilibrium of the end-effector is difficult to solve with classical approaches, especially within the dynamic characteristics of the inertia effect and real-time application. 24 Hence, dynamics modelling, established by Lagrange’s equations of first kind, is used to trajectory planning, predictive control and effective workspace calculation of CDPM in this article. It is composed of a set of the mixed differential-algebraic equation which increases the difficulties of motion control. The dynamic capacities of cable tension within a certain range under the unbalanced loading are studied. Then, a typical feedback controller and an inverse model are set up to estimate the driving function of the trajectory tracking of the suspended platform. Finally, the load spatial distribution of unbalanced loading is calculated within the specified range.
Geometrics model for IRCSWs2
Based on the previous work,
25
the integral structure of IRCSWs2 is shown in Figure 1 with corresponding coordinate system at the fixed platform and the suspended platform. The IRCSWs2 consists of five parts marked in the diagram. Swing motions of suspended platform are simultaneously controlled by both two actuators installed on the middle of each cable at fixed point, and the four connected points of the suspension cable are symmetrical distribution around the suspended platform. Each cable can be divided into two equivalent cables when modelling dynamics system and equivalent cable is from the fixed point to the attached point. The suspended platform is spatial multi-rigid-body systems with six DOFs denoted by

3D model of the IRCSWs2. IRCSWs2: incompletely restrained cable-suspension swing system driven by two cables.
The IRCSWs2 dynamics is described as follows: the actuator displacement used as input and the outputs of system are the posture of the suspended platform and tension. When one actuator is working independently, the suspended platform is swinging motion about a single coordinate axis in the inertial frame, and the elastic elongation of ith suspension cable is donated as ui .
Dynamical model of IRCSWs2
Dynamics analysis
The motion mechanism of IRCSWs2 (Figure 1) can be described as the ith suspension system model, as shown in Figure 1(b). After a series of transformation, the differential equations of motion were derived by Lagrange’s equations. The resulting equations of motion for the swing system can be represented by

where
The relation between the cable and platform must satisfy geometric boundary conditions represented by

where ui is elastic elongation of cable and

in which, for the space case,

where c(⋅) and s(⋅) denote shorthand writings for sine and cosine functions, respectively. α, β and γ are the rotation angles of corresponding axis on local coordinate system Oxyz, respectively.
Forces of constraint in a solution for the motion between platform and suspension cables are derived by the technique of Lagrange multipliers. Then, the governing equation of system is a form of the mixed differential-algebraic equation as

in which

in which

The combined set of kinematic constraints is rewritten as followed

in which
where

Applying the first derivative and the second derivative about time on equation (5) yields

The variables

Since it is difficult to solve the mixed differential-algebraic equation directly, the algebraic equations in equation are converted into differential equations which can be solved by the Baumgarte’s stabilization method 26 or Euler backward difference approximation method. 27
Modelling of the driving function
The aim of IRCSWs2 is designed for the purpose of simulating swing environment under desired dynamic angle. Inverse dynamics behaviour of IRCSWs2 with ideal cables reduces to that of the suspended platform, thus the equation of motion is represented by 26,27

where

where
In order to give a reasonable value of driven amplitude, the cable length of the inverse position problem is obtained by equation. The trajectory corresponding to a periodic swing motion about x- and y-axes is designed as follows

Based on feedback linearizing control,
28
the input can be written as
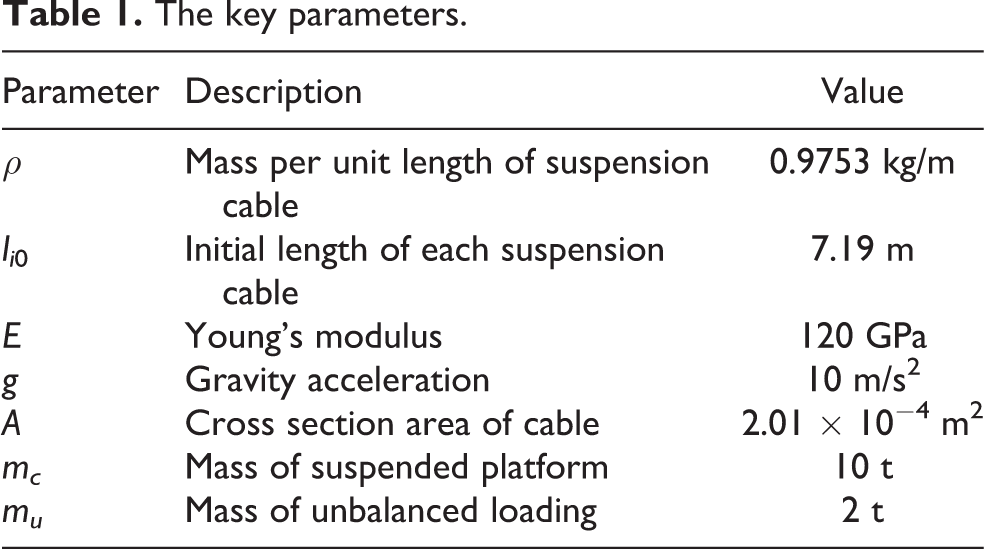
The key parameters.
The posture response and cable changes are plotted in Figures 2 and 3, respectively. Due to the fact that the coordinates of the point of tangency of the last sheave and mechanical joints are just symmetric about the base platform in Figure 1(a), the cable length varies symmetrically. The change of the first cable is almost completely equal to the third cable, and similar result is obtained for the second cable and the fourth cable. The data of curve fitting are approximately sine function with different phases and its amplitude is 0.5302 and 0.3598 m.

Posture tracking.

Cable length changes.
Trajectory analysis
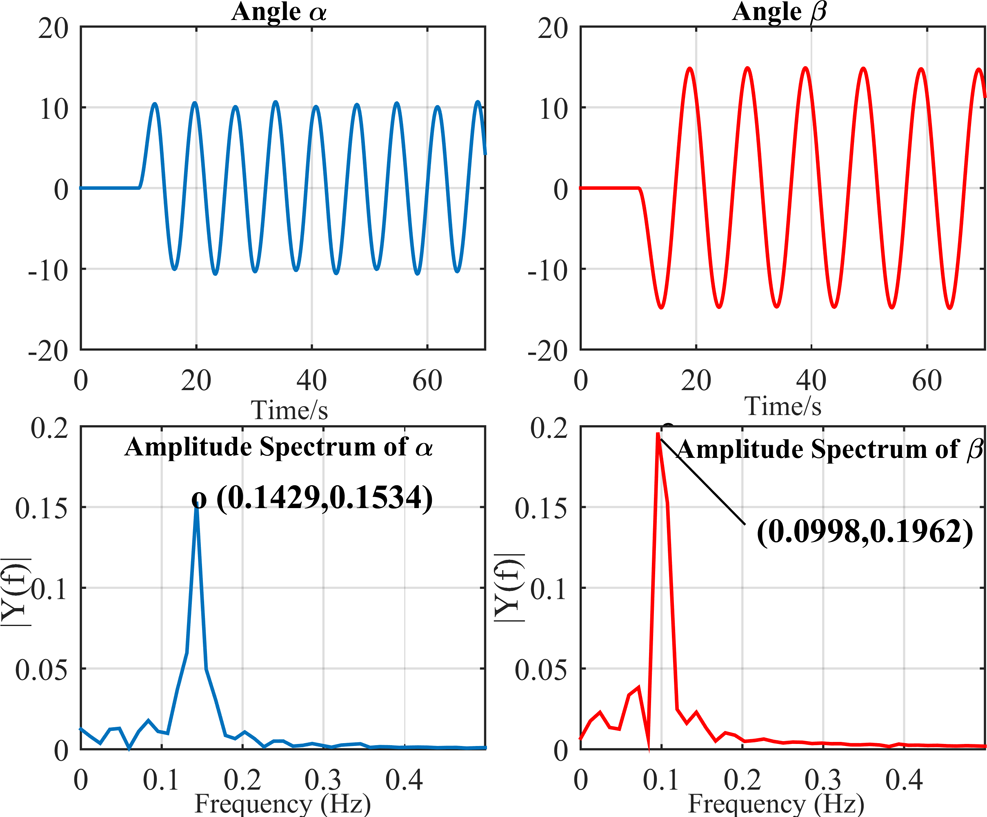
The mixed differential-algebraic equation, a complex nonlinear problem, was solved by the Baumgarte’s stabilization method. The swing angle and cable tension are plotted in Figures 4 and 5. The angles α and β of the suspend platform represent approximately sinusoidal variation with a sinusoidal excitation. Based on power spectrum analysis, the frequencies of α and β are same with driving motion. The axial tension has finite impulse response that is caused by suddenly switch on at initial phase just, as shown in Figure 5. Since using suspension cables take the place of link mechanisms, IRCSWs2 has competitive advantages of effective payload to mass ratios. The IRCSWs2 is underconstrained cable suspended mechanism and includes swing the suspended platform to the desired angle quickly and precisely. Underconstrained system is usually challenging to achieve desired trajectory of the suspended platform and limited tension.
The swing angle of the suspended platform.

Cable tension.
Based on the assumption that the inertia force of suspended platform is neglected and cable mechanical behaviour is simplified as an extensible string, a simple mathematical model for the static of CDPMs with two actuators is illustrated in the study by Blajer and Kołodziejczyk. 29 This simplified static analysis of IRCSWs2 is also readily available in optimizing the mechanism geometry.
Centre point’s trajectory shaped like a concave polygon quadrilateral from the view of x-y axis (Figure 6(a)). The simulated response plot of dynamics model, shown in dashed red lines of Figure 6(b) and (c) (dynamics model), is overlaid on the static model. Space volume of centre point’s trajectory is bigger than the static. This value specifies bound of the desired swing angle range about (−10,10) and (−15,15), respectively, and displacement in orientations is tiny compared with its size.

Posture and tension between static and dynamics model (static and dynamics model denoted by black line; ignore the inertial effect of dynamics model denoted by dashed red line).
Effective workspace
ICRSW2 is designed to test the equipment and instrument on different swing environments. It is notable that ICRSW2 is hanged by suspended cables in a much different behaviour from mechanical links. In addition, the tensions should be within a limited range during working to meet the function security mechanism. It is necessary to evaluate the design by calculating the workspace of the platform. Upon determining the trajectory of suspended platform, workspace of the upper section and the lower section can be determined in a fixed block of space that satisfies the set of equalities. The suspended platform in IRCSWs2 should be significantly limited in the size of the workspace, the range of possible cable tension change and the position of unbalanced loading. Space trajectory of eight boundary points in the movement cycle is presented and the upper and the lower sections shaped like a part of spherical surface shown in Figure 7 in meter.

Three sections.
Consider the situation where a device is running inside the testing equipment (for instance, the traction machine drives car moving up and down in well), then the device is equivalent to dynamics load. Platform property and unbalanced loading will contribute to posture of the platform and cable tension. The workspace region of limited range of cable tension can be expressed as the intersection of a set of inequality equations and the nonlinear equations in mathematically. Due to the fact that the algebraic equation is nonlinear and classical approaches cannot solve it, previous studies have been concerned with determining only the boundary of the workspace.
A more accurate calculation of effective workspace can be obtained by analytical formulations which gives a good insight into its geometry. The possibility position of unbalanced loading is depending on moving device which largely determines the distribution of the cable tension by pointwise evaluation techniques. Possible distribution workspace of unbalanced loading is discretized into a set of coordinate points by fixed step size. The load spatial distribution of unbalanced loading with mu = 2 t is calculated within the specified range which is important in guarantee quality of the safety and performance requirements. Figure 8 shows the load spatial distribution with tension fluctuations in 30% and 35%, respectively.
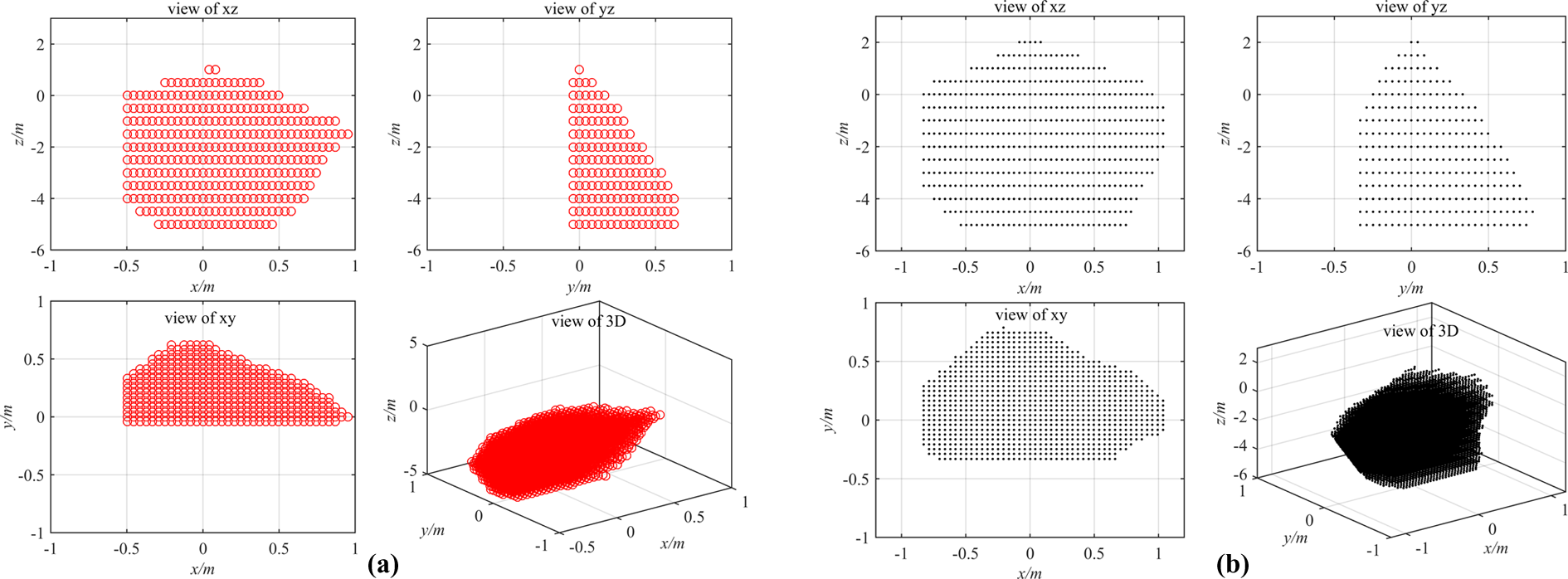
Load spatial distribution. (a) Tension fluctuations in 30%. (b) Tension fluctuations in 35%.
Load spatial distribution is mainly concentrated in geometric centre of the platform, and its total space increases with tension fluctuation limit. It can be seen that load spatial distribution is asymmetric in absolute reference frame, which is because the swing cycle about x- and y-axes is different. Due to the fact that effective workspace of ICRSW2 which controls the suspended platform simply by two active cables is limited by the cable material, load spatial distribution is important sense to the development of swing-testing platform. It can be avoided an extreme case that a cable tension is exceeded the limit which can cause breaking cable accidents. Driving boundary and actual driving loci are shown in Figure 9. Actual driving loci are far away from driving boundary, thus, IRCSWs2 could have avoided the singularity loci (driving displacements 1 and 2 are expressed as S 1 and S 2, respectively).
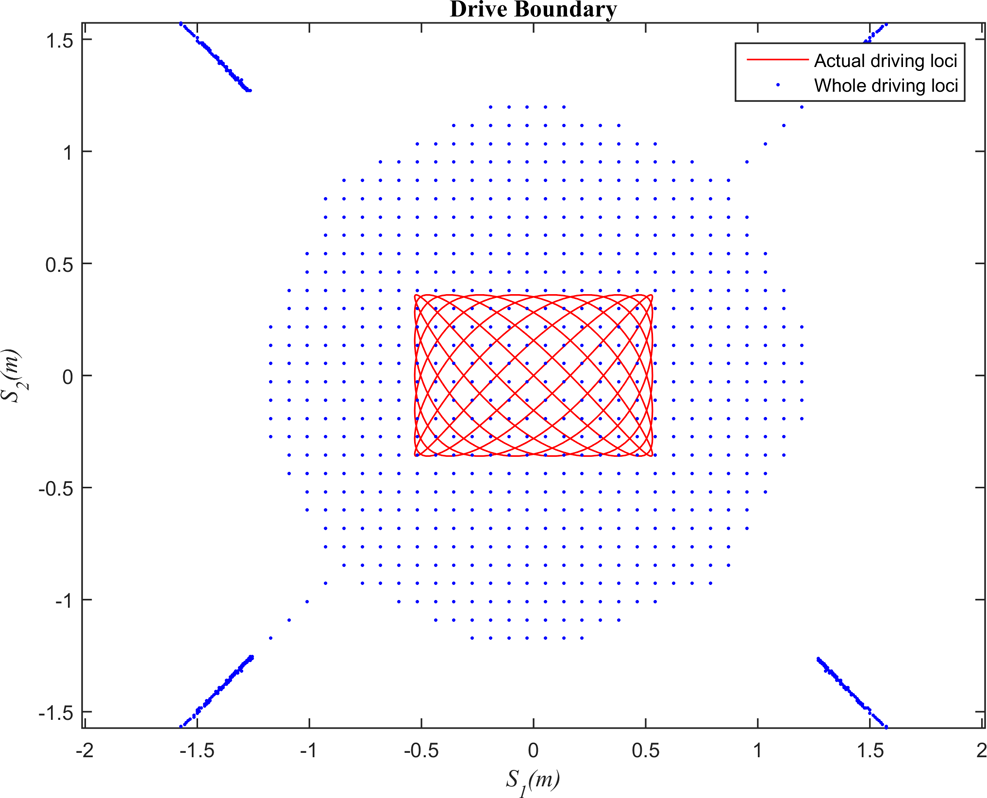
Drive boundary and actual driving loci.
Conclusion
This article presented a dynamic model of swing platform by cables with inertia effect of the suspended platform in a real-time system taken into account. The workspace and trajectory analysis of IRCSWs2 is investigated in the aspects of dynamics model. The following conclusions could be drawn: This article focuses on introducing and analysing the motion of IRCSWs2 by Lagrange’s equation of first kind. The performance of periodic motions with desired amplitude, estimated by a typical feedback controller and an inverse model, is investigated. The mixed differential-algebraic equations are transformed to ordinary differential equations solved by the Baumgarte’s stabilization method. The posture of suspended platform of statics model is consistent with the dynamics model when inertia effect of suspended platform is ignored by comparison. The translation displacement of suspended platform is tiny, and rotations of angles about, respectively, x- and y-axes present sinusoidal variation, and the rotation about z-axis is tiny enough, which can be neglected. The unbalanced loading exerted on the suspended platform has little effect on the swing angle; in contrary, it has a great impact on the cable tension. Load spatial distribution is useful to optimal design the cable suspended platform, estimate system features and ensure positive and bounded cable tensions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (51475456) and the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).