
Abstract
Bilateral teleoperation systems have attracted significant attention in the last decade mainly because of technological advancements in both the communication channel and computers performance. In addition, non-linear multi-degree-of-freedom bilateral teleoperators along with state observers have become an open research area. In this article, a model-free exact differentiator is used to estimate the full state along with a chattering-free second-order sliding mode controller to guarantee a robust impedance tracking under both constant and an unknown time delay of non-linear multi-degree-of-freedom robots. The robustness of the proposed controller is improved by introducing a change of coordinates in terms of a new nominal reference similar to that used in adaptive control theory. Experimental results that validate the predicted behaviour are presented and discussed using a Phantom Premium 1.0 as the master robot and a Catalyst-5 virtual model as the slave robot. The dynamics of the Catalyst-5 system is solved online.
Keywords
Introduction
Most teleoperation schemes that consider (constant or varying) time delays (induced by the communication channel) have been proposed in the last decade for non-linear multi-degree-of-freedom (DOF) manipulators; for instance, the studies discussed in the literature. 1–4 Outstanding complete surveys on bilateral teleoperation schemes are the studies discussed in the literature. 5–8
Many of the published works have addressed the problem of controlling a teleoperation system assuming that velocity can be measurable; however, in practice, velocity (even acceleration) is hardly available. There are few remarkable exceptions addressing this problem. 9 –12 A model-free sliding mode-based observer (achieving finite-time convergence of the estimation error) is implemented in the study by Garcia-Valdovinos et al. 9 The work discussed by Garcia-Valdovinos et al. 10 is the first formal work addressing the use of velocity and acceleration observers for bilateral teleoperators. A variable structure controller coupled with an adaptive perturbation estimation is proposed in the study by Ghafarirad et al. 11 for trajectory tracking of position using a piezoelectric device. A super-twisting observer is proposed in the study by Gonzalez et al. 12 to estimate velocity and acceleration in non-linear bilateral teleoperators.
Regarding sliding mode control, Buttolo et al. 13 proposed model-based first-order sliding mode controllers for both master and slave stations, achieving an improvement with respect to position tracking and parametric uncertainty. Although a good level of transparency is achieved, the inherent effects of the first-order sliding mode control due to the high-frequency signals of the control input make it unsuitable to be implemented in a physical system, leading to an unexpectedly deterioration of the overall system performance and, therefore, loss of transparency. Park and Cho 14 proposed to implement an impedance control for the master and a modified first-order sliding mode control for the slave, in which the gain that satisfies the sliding condition can be set independently of time delays. Thus, this scheme results to be robust against a constant time delay. Nevertheless, this scheme easily becomes unstable when interacting with rigid environments. To deal with this issue, the same authors proposed a sliding mode impedance control for the slave in order to reduce the impact forces and achieve a sustained stable contact. 15 Similarly, in the study by Cho and Park, 16 the problem of parametric uncertainty is studied. Additionally, an algorithm for parameter tuning is provided. However, the signum function used for the sliding mode is replaced by a saturation function to reduce the chattering, resulting in poor tracking performance, hence, a low degree of transparency. A number of bilateral teleoperation schemes addressing first-order sliding mode controls, most of them model-based schemes, have been published in recent years, for instance, 11,17,18,19,20 where some sort of state estimation has been used.
Finally, the literatures 9,10,12,21 ,22 proposed modified schemes based on higher-order sliding modes to avoid the addition of chattering to the system. Formal and rigorous stability proofs, taking into account state observers for both master and slave robots, are considered for linear and non-linear systems.
In this article, a new nominal reference is proposed in order to introduce a change of coordinates into the slave closed-loop dynamics. The approach yields significant improvement of the robustness of the system along with the chattering-free second-order sliding mode control. The slave control scheme withstands parametric uncertainty and guarantees exponential tracking position with an acceptable sustained contact force tracking, under an unknown constant time delay. An exact differentiator, proposed in the study by Levant, 23 is implemented to estimate robust velocity and acceleration, without previous knowledge of any system parameters.
The proposed scheme is developed for non-linear systems, and a formal analysis of stability is presented. Experimental results validate the proposed bilateral teleoperation scheme.
Dynamics of the teleoperation system
Both the master and the slave manipulators are modelled as a pair of non-linear (n)-DOFs serial links with revolute joints, as follows


where
Impedance control technique
The impedance control technique proposed by Hogan 24 is one of the fundamental approaches for force tracking control in robot manipulators with constrained motion. Impedance control regulates the force between a manipulator and the environment by defining the target impedance relationship between position and contact force. The desired force is indirectly controlled by pre-specifying a robot positional reference trajectory that is determined based on the stiffness and environment location.
Typically, the task is defined in the Cartesian space and hence, an accepted choice is to design the target impedance for each teleoperator in the same space. To this end, joint dynamics (1) and (2) have to be transformed into the Cartesian dynamics by means of the forward and differential kinematics as follows (from this point forward, without loss of generality, arguments are omitted for simplicity)


where expressions for the master (i = m) and the slave (i = s) are as follows



where
Delayed signals and scale factors
Prior to defining the controller design, it is necessary to define the variables exchanged between each site. Variables sent from the master to the slave are



where Td denotes the constant time delay induced by the communication channel. To simplify the notation, time delay is the same in both directions, from master to slave and vice versa. The only variable sent from the slave to the master is the environment force

Figure 1 shows the information that is exchanged between the master station and the slave station.

Block diagram of the proposed bilateral teleoperation scheme.
Position, velocity, and acceleration of the master as well as the environment contact force of the slave can be scaled up or down by means of the diagonal matrices



with kinesthetic perception of
Remark 1
Matrices



and for force scaling

where kp and kf are positive scalars and denote the scaling factors.
Velocity and acceleration observer
Real-time access to the states, particularly velocity and acceleration, has always been a challenging problem. Either the dirty-Euler differentiator, along with a filter technique, or observers (whether these are linear or non-linear, model-based or model-free) are good options to deal with the lack of velocity and/or acceleration sensors. In 2003, Levant
23
proposed an arbitrary-order real-time differentiator that allows robust exact differentiation up to any given order l provided the next (l+1)th derivative is bounded by a known constant. In this work, velocity and acceleration signals of the master and the slave robots are obtained by means of the exact differentiator, preserving the stability of the system and achieving an adequate performance in comparison to the typical Euler differentiator. In our case, l = 2 means that the measured position



where
Master controller design
Commonly when driving a master robot, it is expected that the human operator feels very low friction and inertia. However, in some cases, it is preferable, even convenient, for the human operator to choose arbitrarily a comfortable damping/inertia by tuning some parameters. The latter is possible if a desired impedance dynamics is imposed on the master robot, as follows

where
Solving for

Now, solving for


From equation (14), note that the master velocity and acceleration have been replaced by their estimate velocity and acceleration given by the observer (11). Since estimation errors exhibit finite-time convergence, thus, equation (12) will arise.
The master impedance control law (14) enforces the desired impedance (12) in closed loop, whose parameters are chosen by the user depending on a specific task, such that 22 :
If the slave robot does not touch the environment,
If the slave robot does touch the environment,
Remark 2
The master Cartesian control law can be mapped into joint control law multiplying equation (13) by the transpose of the master Jacobian, as shown below

Next, the design of the slave controller is given.
Slave controller design
Under similar rationale on the master controller design, we now introduce a change of coordinates in order to tailor an extended error variable to induce a second-order sliding mode and, thus, to produce a desired impedance behaviour modulated by the environmental contact force. Remember that this controller must withstand constant time delay. To this end, the desired slave impedance model becomes now the desired manifold to converge. In other words, we need to design a controller to guarantee that the closed-loop error equation yields the desired slave impedance model. That is, the controller must satisfy the sliding condition at the desired slave impedance model.
Desired slave impedance model
The desired impedance characteristic for the slave robot is defined as follows

where

A dynamic change of coordinates
Let us consider the following nominal reference in order to introduce a change of coordinates in the closed-loop system

where


where
Note that,
Open-loop error dynamics
Equation (4) is linearly parameterizable
25
by the product of a regressor

where the regressor


with


and its time derivative



where
Subsequently, the control law for the slave is given.
Impedance passive computed torque control
The proposed slave control is expressed in terms of the nominal reference as follows

By considering equation (20), the above expression can be rewritten as follows

where
Remark 3
Since the estimation error converges to zero in finite time, the separation principle is satisfied automatically; thus, closed-loop dynamics given by equation (17) holds.
Remark 4
In the absence of noise and after the observer’s finite-time transient, its outputs can be considered as exact measurements of the derivatives. However, in the presence of measurement noises, the differentiation accuracy inevitably deteriorates rapidly with the growth of the differentiation order. 23 In our case, the differentiation order is two, so it is not expected to experience a low accuracy. Even when treating noisy signals, the observer performance only improves with the sampling step reduction. In our case, sampling time is relatively small: 1 ms.
Remark 5
By carefully tuning constants
Stability analysis
In this section, the stability analysis of the closed-loop dynamics of both master and slave systems is studied as well as the whole teleoperation system.
Master stability analysis
Closed-loop system (12) describes a set of n decoupled second-order differential linear equations that exhibit stable behaviour by a suitable choice of the matrices
Slave stability analysis
Theorem 1
Substituting the control law (24) into the slave robot dynamics (4) yields the closed-loop dynamics

which describes a first-order differential non-linear equation in the new variable
Proof
Stability analysis is divided into two parts.
Closed-loop signals boundedness
Let us consider the following Lyapunov candidate function

whose time derivative along the trajectories of the system is as follows

Substituting equation (26) into equation (28) results in


where the well-known skew-symmetry property
Second-order sliding mode condition
Now, to prove the existence of the sliding mode, it is necessary to verify the sliding mode condition

Multiplying





where

which means that, asymptotically,

where
Stability of the teleoperation system
Last section presented the control law for each station, master and slave, and their individual stability analysis. However, the overall teleoperation stability system must also be addressed.
Passivity is an intuitive tool that examines the energy flows in a system and makes stability assertions if energy is dissipated instead of generated.
27
The proposed teleoperation system includes a human operator, an environment, two manipulators, and the communication channel. Considering that the human operators and the environment are passive,
28
and since the nature of manipulators, the only source of instability of the system is the communication channel.
29
According to the system structure, the communication channel can be analysed as a two-port network, which relates flows and efforts from one side to another and vice versa. The relationship between network flows


where the elements of the hybrid matrix are as follows




A similar procedure can be carried out to compute the hybrid matrices for the y- and z-axes. In order to analyse the system stability, the passivity theory is applied.
Theorem 2
A linear, time-invariant n-port network possessing a general hybrid matrix, which is analytic in the open Right Half S-plane (RHS), is passive if and only if the general hybrid matrix is positive real. 30
Definition
An n × n matrix function
Its Hermitian part

For the given two-port network, conditions (a) and (b) of realness are held immediately because of the structure of the hybrid matrix elements. They are satisfied with positive impedance parameters. The three conditions of (c) can be expressed for each Cartesian axis by



The first inequality is satisfied by choosing a positive

If the design parameters satisfy equations (35) and (37), the teleoperation system will be passive for any set of passive human operators and environments even with the presence of constant time delay. 15,30
Remark 6
Master controller tuning.
Master impedance parameters are tuned, such that a comfortable operation can be achieved. A higher impedance yields a heavier and more sluggish performance, while a lower impedance makes the master teleoperator weightless and, in general, more difficult to drive, depends on operator’s dexterity. Then tuning of the controller is made heuristically, provided that the choosing of
Remark 7
Slave controller tuning.
First of all, impedance parameters must be chosen, such that equations (34)–(36) are fulfilled. Similar to the master controller tuning, slave impedance tuning is made heuristically, provided that a wide range of frequencies are allowed when evaluating equations (34)–(36). Additional stability and improvement of the performance, as the stability proof suggests, is to set an arbitrary
Experimental results
Semi-experimental set-up
In this section, the performance of the proposed control scheme is evaluated by means of experimentation carried out in a semi-experimental set-up. The semi-experimental set-up (shown in Figure 2) is fitted with a Phantom Premium 1.0 haptic interface (used as the master robot) and a NANO17 six-DOF force/torque sensor attached to the Phantom’s end effector to measure the human operator input force. The complete system, haptic interface and virtual environment run in a personal computer under Windows XP operating system. The virtual slave robot mimics the industrial robot Catalyst-5, and its dynamics is solved online by a well-known numerical integrator. The communication channel is emulated with an First-In First-Out (FIFO) memory buffer that introduces bilateral time delays. The data to be exchanged between the master and the slave are stored in the buffer instead of sending them immediately to their destination. The data are released only at the moment when the buffer is full. Thus, the magnitude of the time delay depends on the size of the buffer. The combination of Visual C++, CHAI3D and OpenGL libraries allows the user to interact with a high fidelity and realistic virtual environment in real time.

Semi-experimental set-up.
Robot and controllers parameters
The slave robot (virtual robot) is teleoperated in such a way that its end effector follows a predefined trajectory, as it is shown in Figure 3. The sequence is as follows. The master and the slave robot’s initial conditions are different and isolated from the virtual plane. The operator approaches to the plane to make contact at the red point, as shown in Figure 3 (right). Then, the operator requests the slave robot’s end effector to follow the circumference while exerting a sustained level of force onto the plane. After the completion of one circumference, the operator follows a segment of straight line, stops exerting force and again starts exerting a sustained force onto the plane while moving along the last straight line segment. The experiments last approximately 17 s.

Definition of the task: standard trajectory to be followed by the operator.
To perform the above desired task, feedback gains for the master and slave controllers are given in Tables 1 and 2.
Master controller feedback gains.

Slave controller feedback gains.

Scaling factors are set as follows:
Environment parameters
The virtual plane (environment) is modelled as a spring whose stiffness coefficient

Location of the virtual plane with respect to the slave robot base frame.
Slave robot parameters
Parameters are those of the Catalyst-5 industrial robot. Only the first three DOFs are modelled and controlled; pitch and roll joints are fixed. Table 3 lists the main robot parameters.
Main parameters of the slave robot (Thermo Fisher Scientific Inc.).

Results
Two sets of experiments were carried out. The first set does not consider time delay, that is,
Figures 5 to 8 depict the experimental results considering a time delay
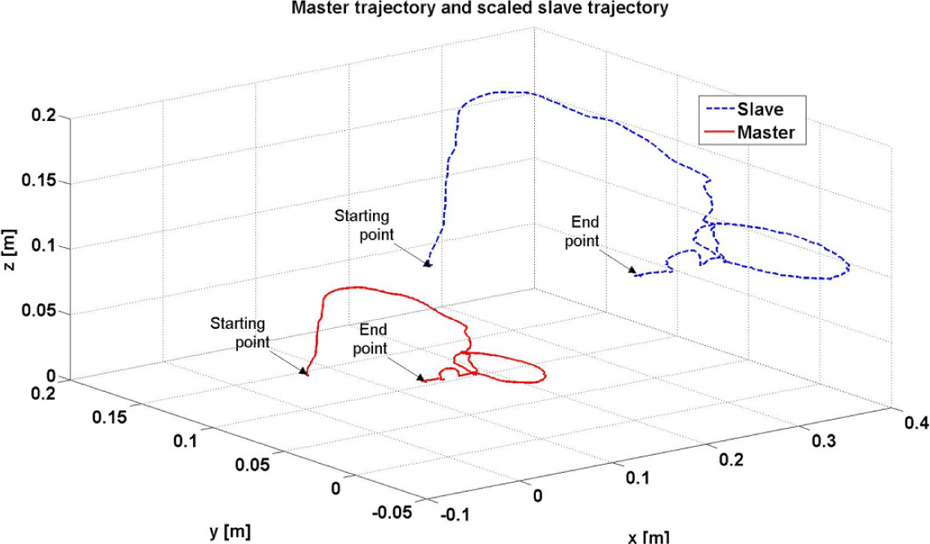
Three-dimensional view of Cartesian master and slave trajectories (

Joint position tracking on the slave side (

Joint position tracking error on the slave side
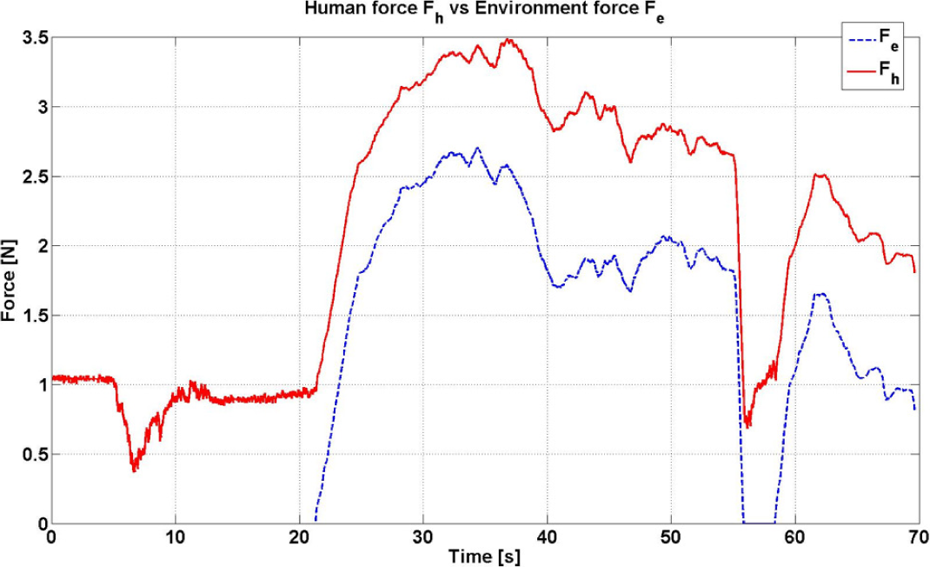
Human force versus environment force
Figure 6 shows the position tracking for each joint. Note that the position tracking error is very close to zero, as it can be seen in Figure 7. Finally, Figure 8 shows that the human force and the environment force are very similar; an issue that suggests a good level of transparency.
Figures 9 to 12 depict the experimental results considering a time delay

Three-dimensional view of Cartesian master and slave trajectories (

Joint position tracking on the slave side

Joint position tracking error at the slave side
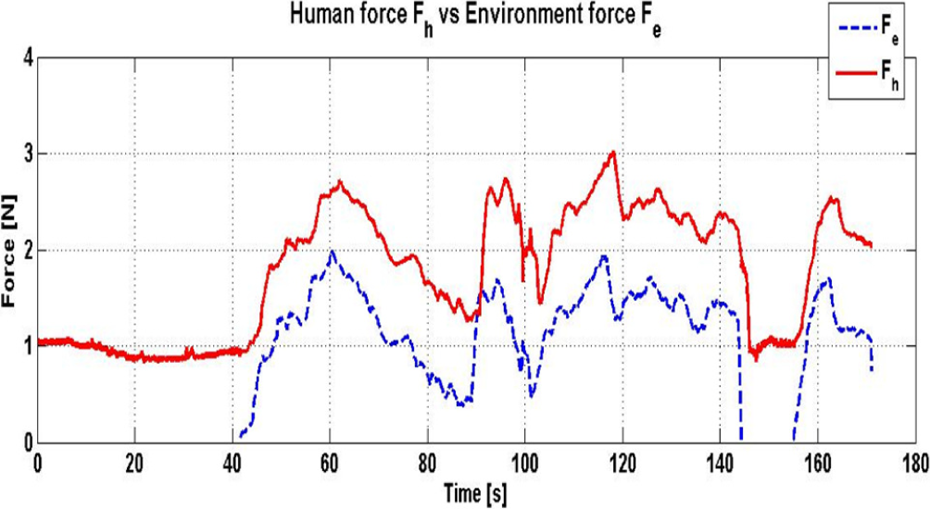
Human force versus environment force
Conclusions
In this article, a robust but smooth bilateral teleoperation scheme that achieves exponential tracking performance under unknown constant time delay is proposed. Formal analysis of stability for the whole teleoperation system demonstrates passivity for multi-DOF non-linear teleoperators. Experimental results reveal the effectiveness of the approach.
Several factors are involved here to guarantee the stability of the whole teleoperation system (human operator + master robot + communication channel + slave robot + environment). On one hand, master controller and slave controller have been designed separately (independently of time delay), that is, locally, each controller guarantees stability. On the other hand, it is well known that the communication channel is the main source of instability when time delay is present. Therefore, in order to prove the stability of the entire teleoperation system, considering time delay induced by the communication channel, the n-port network theory (originally developed for electrical systems) was taken into account. Thus, analysing the master robot + communication channel + slave robot system (assuming that human operator and environment are passive) as a two-port network, it can be concluded passivity, regarding unknown constant time delay. Finally, but not least important, it is documented in several works that second-order sliding mode control (at the slave side) provides with additional robustness against time delay and parametric uncertainty.
Future work is to design an adaptive control based on the new nominal reference proposed in this article and evaluate its performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: Garcia-Valdovinos and Bandala-Sánchez acknowledge support from SEP-CONACYT projects 61499 and 239089, respectively. The other authors thank CONACYT scholarship support.