
Abstract
Transparency has been a major objective in bilateral teleoperation systems, even in the absence of time delay induced by the communication channel, since a high degree of transparency would allow humans to drive the remote teleoperator as if he or she were directly interacting with the remote environment, with the remote teleoperator as a physical and sensorial extension of the operator. When fast convergence of position and force tracking errors are ensured by the control system, then complete transparency is obtained, which would ideally guarantee humans to be tightly kinaesthetically coupled. In this paper a model-free Cartesian second order sliding mode (SOSM) PD control scheme for nonlinear master-slave systems is presented. The proposed scheme does not rely on velocity measurements and attains very fast convergence of position trajectories, with bounded tracking of force trajectories, rendering a high degree of transparency with lesser knowledge of the system. The degree of transparency can easily be improved by tuning a feedback gain in the force loop. A unique energy storage function is introduced; such that a similar Cartesian-based controller is implemented in the master and slave sides. The resulting properties of the Cartesian control structure allows the human operator to input directly Cartesian variables, which makes clearer the kinaesthetic coupling, thus the proposed controller becomes a suitable candidate for practical implementation. The performance of the proposed scheme is evaluated in a semi-experimental setup.
Keywords
1. Introduction
Master-slave systems have been extensively studied since the pioneering works of [1, 2]and [3]; these studies have been motivated by a variety of applications, ranging from space applications to underwater tasks [4] and medical applications [5], as well as teleoperation in cluttered or inaccessible environments, such as dangerous sites or in micro stages [6].
Basically, in bilateral teleoperation the human operator interacts through a robotic master teleoperator to govern the position and contact force of the remote (slave) robot, while the slave robot (teleoperator) reproduces these trajectories onto the remote environment. When the remote environment continuously feeds back some pieces of information, the whole system is coupled and the information flows in both directions to achieve a bilateral teleoperation system, with or without time delay. In this way, scaled slave contact force is perceived continuously by the human operator to kinaesthetically couple him/her to the slave site, so as to improve considerably the closed-loop task performance.
When perfect matching of all trajectories is obtained, it is said that the system is transparent. Today, it still remains an open issue as to how to render a high degree of transparency in nonlinear teleoperation systems, without time delay, when the dynamic model of each teleoperator is not available.
1.1 Background
One of the major objectives in designing bilateral teleoperation control systems is to achieve transparency; that is, a match between the master and slave positions and contact forces [7]. Many teleoperation schemes have been proposed in the last decades, most of them for linear systems, with or without time delay, but all of them seeking stability and a good transparency degree; references [8, 9, 10] and [11] expose in detail some of the most important and popular approaches to bilateral teleoperators.
Position-position (P-P) and position-force (P-F) teleoperation schemes were tested to study their stability and transparency. In [8], the authors demonstrated that this scheme is neither stable for small time delays nor transparent, and that stability is preserved only if a trade-off between controller gains and scale factors versus tracking performance is established. In [12], the force-position (F-P) architecture is applied during the constrained motion, while the position-position (P-P) architecture is applied during the free space motion to attain high transparency. In [13] the effects of controller parameters on transparency of time delayed bilateral teleoperation systems with communication disturbance observer are discussed. The proposed scheme is verified by numerical simulations with linear teleoperators using a Smith predictor at the master side.
Regarding sliding mode control, Buttolo et al. [14] proposed model-based first order sliding mode (FOSM) controllers for both master and slave teleoperators achieving an improvement with respect to position tracking and parametric uncertainty. Although a good level of transparency is achieved, paradoxically the inherent effects of the sliding mode control (introduction of high frequency signals into the system) make it unsuitable to be implemented in a physical system, leading to an eventual instability and, therefore, loss of transparency. Park and Cho [15] proposed to implement an impedance control for the master and a modified FOSM control for the slave, in which the gain that satisfies the sliding condition can be set independently of time delay. Thus, this scheme is robust against constant time delay. Nevertheless, it easily turns unstable when interacting with rigid environments. To deal with this problem, the same authors proposed a sliding mode-based impedance control for the slave in order to reduce impact forces and achieve a sustained stable contact [16]. In [17] the problem of parametric uncertainty is studied, besides which an algorithm for the parameters tuning is provided. However, the signum function, used for the sliding mode, is replaced by a saturation function to reduce chattering, with consequent poor tracking performance, and, therefore, a low degree of transparency. A number of bilateral teleoperation schemes addressing FOSM control, most of them model-based, have been published in recent years: for instance, references [18, 19], and [20], and [21, 22] where some kind of state estimation has been used.
Finally, [23, 24, 25, 26] and [27] propose modified schemes based on higher-order sliding modes to avoid introducing chattering to the system. Formal and stringent stability proofs, taking into account state observers for both master and slave robots, are considered for linear and nonlinear systems. Although the problem of chattering is solved and robustness against constant time delay is accomplished, the system's performance still lacks of transparency.
Regarding velocity observers, a number of state observers techniques have been published for Euler-Lagrange systems, but very few for nonlinear, multi-d.o.f. bilateral teleoperators, such as [21, 24], and [26]-[28].
1.2 The problem
In a teleoperation system, the human drives the master robot in order to command the slave robot to interact with the environment and carry out a task over it. The human then plays the role of generating continuously desired contact force and position trajectory for the slave robot. Several studies [10, 29] reveal that continuous perception of the remote contact force is quite important to increase the quality of the teleoperation. Since we humans evolve in a Cartesian world, a Cartesian-based robot controller would be more intuitive to interact with, and, since each human operator certainly performs differently, it is also important to introduce a transparency that could be tuned at will, in the spatial and time attributes. Then, the formulation of the problem is as follows: “How to guarantee intuitive teleoperation, in a delay free nonlinear teleoperation system?” By intuition it is understood that the teleoperation scheme should be and fulfil the following: i) a Cartesian-based controller for nonlinear teleoperation systems; ii) tuneable degree of transparency; and iii); full access to the state of the system (without resorting on velocity measurements).
1.3 Definition of ideal transparency
A general consensus about transparency is given in [7], defining that the teleoperation system (1)–(2) below is transparent to a human-task interface when the following criteria are accomplished: a) positions
Notice that a) and b) mean nothing but convergence of position and force tracking errors. However, clearly, a modern definition of transparency should include the issues of time delay, visual feedback, as well as the nature of human dynamics. Then, a transparent teleoperation system should consider:
Teleoperators are nonlinear Euler Lagrange systems.
Time delay should not affect kinaesthetic coupling,
Convergence of spatial position and force tracking errors are ensured.
Convergence in time of position and force tracking errors are ensured.
While item 1 is introduced to establish a natural perception of a physical system subject to Lagrangian dynamics, item 3 and 4 mimic [7]. Item 2 points out the two main goals and, at the same time, conflicting issues of a teleoperation system under time delay: transparency and stability. Under this definition, item 1 using (1)–(2) is satisfied, while item 2 is fulfilled since no time delay is considered. Finally, the control system proposed here, guarantee item 3 and 4, under a set of certain circumstances.
1.4 Contribution
In this paper, a Cartesian sliding PD control for master-slave bilateral teleoperation systems is proposed in order to achieve the SCD condition given in [30] and [31], and thereby high transparency. The present scheme neither requires the model nor velocity measurements. Some characteristics of the proposed controller are: 1) it is a model-free control, i.e., it does not require any knowledge of the robot dynamics; 2) it is a smooth, but robust control, based on second order sliding modes (SOSM), which means that chattering is no longer a problem; 3) the control system attains exponential convergence, with no velocity measurements; 4) an acceptable force tracking is achieved by properly tuning a feedback gain; 5) it is a very simple inverse Jacobian-based Cartesian control. In this manner, computation of inverse kinematics, and/or Cartesian robot dynamics are not necessary; and 7) formal stability results, in the sense of Lyapunov and variable structure systems, are presented.
Since the velocity observer used here [32] achieves finite time convergence of the estimation errors, there is no need to prove the stability of the nonlinear system (plant-controller plus observer) because the separation principle does not need to be proved [33]. In this manner, master/slave controllers can be designed by separately, independently of the velocity observer, which can be seen as a model-free state observer.
2. Nonlinear dynamics of the master-slave system
The nonlinear dynamic model of a rigid n-link serial joint non-redundant master/slave robot teleoperation system is considered, see Figure 1.

Schematic diagram of the master-slave teleoperation system


where the subscript m (s) denotes the master (slave) robot; (
2.1 Dealing with Cartesian dynamics approach
Usually, the task is defined in Cartesian space but the teleoperators are defined in the joint space, so either the task (desired trajectory) is transformed into joint space by means of the inverse kinematics mapping or joint robot dynamics (1)–(2) are mapped into Cartesian space dynamics equations of motion as follows, (from here on and without loss of generality, arguments are omitted for simplicity):


with
2.2 Open-loop error dynamics
Since (1)–(2) are linearly parametrizable [34] in terms of a regressor


where the regressor


where the error coordinates


The key up to this point is to design joint nominal references
3. Cartesian error manifold
According to robot forward kinematics


for


Then using (11) to (14), equations (9)–(10) become:


where


Now, consider the following Cartesian nominal references


where

where
It is important to mention that both stations exchange their respective position, velocity, and force (see Figure 1 for instance), the master sends towards the slave its measured position, estimated velocity, and human force, and the slave sends backward its measured position, estimated velocity, and environment force. Notice that computation of inverse kinematics has been circumvented since desired trajectories have been defined in the Cartesian space all the time. The inverted Jacobian matrix plays the role of transforming the velocity and extended errors
4. Model-free exact differentiator as a velocity observer
In 2003, [32] proposed an arbitrary-order real-time differentiator, that allows a robust exact differentiation up to any given order l, provided the next ((l + 1)th derivative is bounded by a known constant. These features allow wide application of the differentiator in nonlinear control theory. In this work, the Cartesian velocity signal of the master robot is obtained by means of the exact differentiator, preserving the stability of the system and achieving excellent performance in comparison to the usual Euler-differentiator. In our case l = 1, which means that the measured position is differentiated once. The following differentiator arises:

where subscript j = {x, y, z} denotes the Cartesian position component. For instance, let x z be the end-effector Cartesian master position in z-axis. From (24), it is evident that a single exact differentiator for each Cartesian position component (x, y.z) has to be implemented in the master robot in order to achieve the estimated Cartesian velocity. End-effector position is obtained by means of the forward kinematics. Constants Δ0j, Δ1j>0 are tuned carefully according to [32]. Since the exact differentiator attains finite time convergence of the estimated states to the real ones, it is not necessary for the separation principle to be proved [33], provided the differentiator dynamics is chosen fast enough so that the states estimates are available for the controller before the system's trajectories leave certain region of stability. In this fashion, master/slave controllers can be designed by separately, independently of the velocity observer.
The main result is given in the following section.
5. Cartesian sliding PD controller
Consider the following controllers:


where


equations (27)–(28) can be rewritten in terms of (15)–(16) and (17)–(18) as follows:


Since

Then multiplying by

where
Part I. Boundedness of closed-loop trajectories. Consider the time derivative of the following Lyapunov's candidate function:

along the solutions of the system. For the sake of simplicity, (32) is divided into two parts V = V1 + V2, and so its time derivative is as follows:

and
Now, substituting the closed-loop dynamics (29) and (31) into (33) and (34), respectively; applying the well-known skew-symmetry property

Thus, adding (35) and (36) and getting rid of common terms, gives rise to:
Expression (37) can be rewritten in joint space as follows:

where expression

where

Hence,

where ΛM represents the maximum eigenvalue of

but it is not because

Then, from (6) the norm of

where

where

with

According to (44),
Part II. Existence of SOSM. Multiplying (16) by

Solving for
with

which vanishes exponentially fast.
Part III. Tracking performance.
Position tracking performance. Solving (46), one obtains:

Force racking performance. According to the boundedness of

From (48), it is evident that the force tracking error remains bounded. In the steady state, the error can be reduced to a reasonable small value by increasing
6. Discussions
6.1 Well-posed inverse Jacobian
Apparently there might be a problem with
6.2 Exact differentiator robustness: Noisy signals vs. accuracy
In the absence of input noises the outputs (state estimates) can be considered as exact direct measurements [32]. In the presence of measurement noises the differentiation accuracy inevitably deteriorates rapidly with the growth of the differentiation order. Nevertheless, this problem may be alleviated by reducing the sampling period.
6.3 How to tune the controller
The stability proof suggests that arbitrary small gains γm, γs and small αm, αs can be set as a starting point. Increase feedback gains
6.4 Cartesian and joint positions
In order to implement the proposed controllers, only Cartesian trajectories
6.5 Robustness
The system has inherent robustness typical of variable structure systems, since the invariance property is attained for all time through (45) whose convergence is governed solely by (47).
6.6 Smooth controller
Higher-order sliding modes, in this case SOSM, have emerged to solve the problem of chattering, which is induced by first order sliding modes (FOSM). In addition to preserve the advantages of FOSM, the scheme SOSM totally removes the chattering effect of FOSM and provides for even higher accuracy [37]. In our case, SOSM is induced and chattering is circumvented by integrating the signum function of
6.7 How to compute master and slave control signal
Taking into account equations (15) and (16), notice that
7. Experiments and results
7.1 Semi-experimental setup
In this section, the performance of the proposed control scheme is evaluated by means of experiments carried out in a semi-experimental setup, in the absence of time delay. The semi-experimental setup (shown in Figure 2) is fitted with a Phantom Premium 1.0 haptic interface that is used as the master robot and a NANO17 six dof force/torque sensor that is attached to the Phantom's end-effector to measure the human operator force. The complete system, haptic interface and virtual environment, run in a PC under the Windows XP operating system. The virtual slave robot mimics the industrial robot Catalyst-5, and its dynamics is solved on line by a well-known numerical integrator. The combination of Visual C++, CHAI3D and OpenGL libraries allow the user to interact with a high fidelity and realistic virtual environment in real time.

Semi-experimental setup
7.2 Results
The slave robot (virtual robot) is teleoperated in such a way its end-effector follows a predefined trajectory as it is shown in Figure 3. The sequence is as follows. The master and slave robot's initial conditions are different and away from the virtual plane. The operator approaches to the plane to make contact at the red point shown in Figure 3 (right). Then the operator requests the slave robot's end-effector to follow the circumference while exerting a sustained level of force onto the plane. After the completion of one circumference the operator follows a segment of a straight line, stops exerting force, and again starts exerting a sustained force onto the plane while moving along the last straight line segment. The experiments last approximately 42 seconds.

Definition of the task: standard trajectory to be followed by the operator
1. Feedback gains
Feedback gains for the master and slave controllers are set as follows:
2. Scaling factors
Scaling factors are set as follows: kp=2.7, kf=1.0.
3. Environment parameters
The virtual plane (environment) is modelled as a spring whose stiffness coefficient

Location of the virtual plane with respect to the slave robot base frame
4. Slave robot parameters
Parameters are those of the Catalyst-5 industrial robot. Only the first three dof are modelled and controlled; pitch and roll joints are fixed.
Main parameters of the slave robot

5. Exact differentiator parameters
Differentiator parameters are set as follows: Λ0j = 10, Λ1 j =5, where j=x,y,z.
Figure 5 depicts master and slave Cartesian trajectories in 3D (three dimensional) view. Notice that the slave Cartesian trajectory is greater than the master trajectory; this is because of the scaling factor kp=2.7.

Cartesian task: free and constrained motion. Slave position is scaled by a factor kp=2.7.
Figure 6 shows position tracking errors in x, y, z coordinates, at the slave side. Notice that a very small position tracking error in the z coordinate arises at the contact stages, that is, when the slave robot exerts a sustainable force onto the virtual plane. Furthermore, notice in Figure 7 that the human force is practically equal to that of the environment force, which implies a high level of transparency.

Position tracking errors in Cartesian coordinates at the slave side. Notice that master position has been conveniently scaled to be compared against the slave position according to
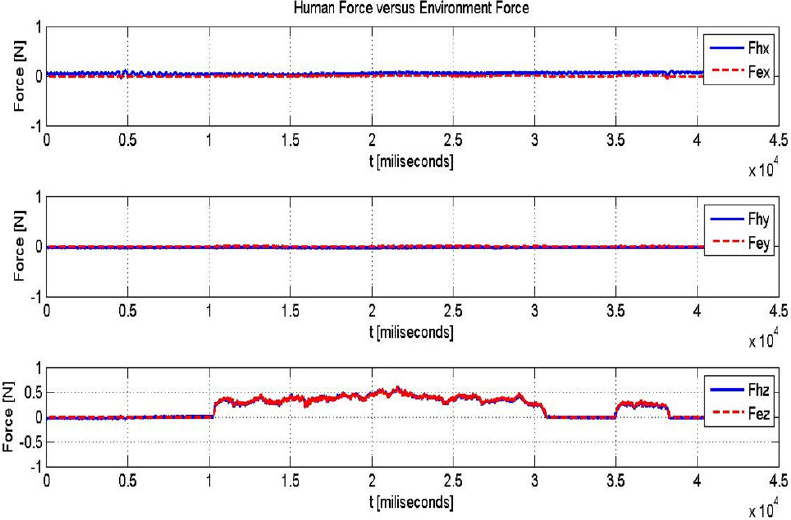
Force tracking performance. The operator exerts a force profile along the z-axis. Force scaling factor kf is set to 1.0.
According to Figure 3, there are two contact stages during the experiment: the first one, evident from 10 to 30 seconds; and the second one, from approximately 30 to 38 seconds, which can be seen in Figures 6 and 7.
In Figures 8 and 9, it is possible to see the sliding mode surfaces response in Cartesian coordinates, for the master and the slave robots, respectively. Notice that both

At the master controller, the sliding mode condition (
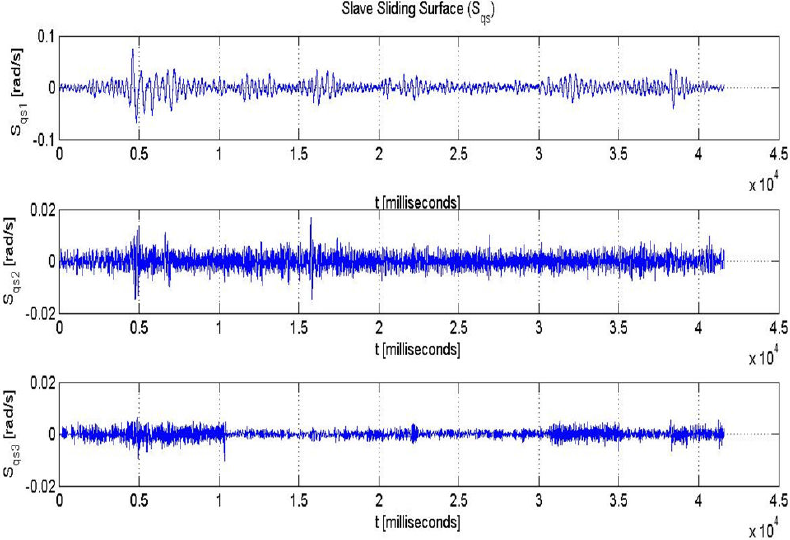
At the slave controller, the sliding mode condition is enforced for all time, that is, (
Finally, Figures 10 and 11 depicts, respectively, applied torques to master and slave robots.

Torque control input applied to each master joint actuator. Notice that the control signal is free of chattering.

Torque control input applied to each slave joint actuator. Notice that the control signal is free of chattering.
8. Conclusions
A simple yet straightforward approach based on the second order sliding mode control for nonlinear bilateral teleoperators has been synthesized. The proposed scheme accomplishes the transparency criteria without velocity measurements, nor robot dynamics knowledge, nor computing Cartesian robot dynamics. Exponential fast convergence of position and velocity, without overshooting, is ensured; in fact, since the sliding mode exists for all time it is possible to achieve a fast response.
Force tracking error exhibits a strong performance, similar to other approaches using impedance control reported in the international literature.
Since the velocity observer (exact differentiator) achieves finite time convergence of the estimate errors, the separation principle proof can be omitted, provided the observer is carefully tuned so that it exhibits a faster response than the master dynamics. Semi-experimental results considering nonlinear systems reveal the good performance of the proposed scheme.
Footnotes
9. Acknowledgements
Hugo Jiménez-Hernández thanks support from ASA-Conacyt Sectorial Fund, project number 208466. Alan Lopez-Segovia and Hugo Santacruz-Reyes thank CONACYT scholarship support.