
Abstract
The bilateral teleoperation system is susceptible to model parameter uncertainty and unknown disturbances in both the master and slave manipulators, resulting in instability and inaccuracies in the force and position tracking performance. To address these issues, a novel nonlinear model reference adaptive impedance controller has been designed to achieve coordinated force and position synchronization of dual manipulators. The adaptive control laws, based on sliding mode functions, have been designed to compensate for the uncertainty of the manipulator model. Furthermore, an adaptive estimation law has been employed to appraise the unknown upper bound of external disturbances. This ensures that the closed-loop model parameters of the dual manipulator converge to the reference impedance model respectively. Simultaneously, it enables the position error between the reference model response and the end-effector task space position to asymptotically converge to zero. To verify the effectiveness of the proposed controller, simulations have been conducted on the MATLAB platform and experiments on a single degree of freedom teleoperation system have been performed. The results demonstrate that the controller exhibits strong robustness and has the capability of force-position tracking ability.
Keywords
Introduction
For complex underwater environments with high water pressure, 1 a bilateral teleoperation manipulator system is proposed to ensure operator safety and enable intelligent operations. 2 The system involves a slave manipulator located in the working area that interacts directly with the objects, tracking motion signals from a master manipulator and transmitting slave operation forces to a local master manipulator. 3 It allows the operator to perceive force information from the slave manipulator while operating the local master manipulator with coordinated force and position synchronization of the master and slave manipulators. 4 However, there are challenges in teleoperation systems that need to be considered. 5 The challenges include the nonlinear characteristics of the manipulator, 6 uncertainties in manipulator dynamics caused by factors such as joint friction, external disturbances and communication time-delay, 7 as well as the disturbance caused by water attached to the underwater manipulator that affects the mathematical model of the slave manipulator. 8 The unknown and uncertain disturbances in the aquatic environment will bring difficulties of system stability and tracking performance in the manipulator operation process. 9 What is more, the external influences of ocean currents, heterogeneous movements of water currents, and pressure variations in the underwater environment play a key role in the stability control of the underwater manipulator. 10
Moreover, the underwater manipulator’s movement is affected by uncertain disturbances such as water resistance, 11 which further complicates the design of the teleoperation controller to ensure global stability and achieve force and position tracking between the master and slave manipulators. 12 The uncertainty in manipulator dynamics poses challenges for the controller design and jeopardizes the overall system stability, making it crucial to enhance the robustness and accuracy of force and position tracking in the bilateral system.
The operator and the operated object can be considered as passive, 13 and the master-slave teleoperation system can be regarded as a dual closed-loop control system that realizes the master force tracking convergence in the outer loop and the slave manipulator position tracking convergence in the inner loop. 14 The control of the master-slave teleoperation system mostly has two feedback methods based on force feedback 15 and position feedback, 16 to achieve the goal of force 17 and position coordination between the master and slave robot. 18 In order to guarantee the force 19 and position asymptotic convergence performance with model uncertainty 20 and external disturbance in teleoperation system, 21 many scholars have proposed different control methods to make sure the stability 22 and transparency situation. 23
For the problem that the slave uncertain disturbance problem in the bilateral teleoperation system. 24 Aiming at the problem of unmeasurable speed and uncertain dynamics, 25 Yana Yang designed a robust sliding mode control based on a speed observer with neural network uncertainty compensation, 26 which realized the force position synchronization of master and slave. A novel adaptive force-position control based on state observer is proposed to achieve the position and force tracking in the teleoperation systems with nonlinear parameter. 27 In paper, 28 combining the neural network approximation and adaptive law, 29 a sliding mode adaptive controller was proposed for the robot to guarantee the trajectory tracking. 30 The effective adaptive fuzzy and neural network control methods were proposed for dynamical uncertainties for the general nonlinear systems in reference. 31 An adaptive switching-based controller is demonstrated with four-channel wave variable transformation method for the force and position tracking problems of teleoperation system under dynamic uncertainty. 32 Cho and Park 33 proposed the slave impedance control and integral sliding mode control to eliminate the unknown disturbance to achieve force and position tracking, 34 however, it did not consider the master joint friction and external disturbance. 15 Majtaba proposed an adaptive bilateral control method for the manipulator dynamics uncertainty, 16 and applied to the medical equipment teleoperation process, 35 but the uncertainty caused by external disturbance is not considered. 36
In such special field, for example, clearance of mines teleoperation, 37 underwater teleoperation 38 and nuclear radiation teleoperation, the master is close to the slave robot, 39 so that the communication time-delay is not the important factor to the stability 15 and tracking convergence which can be ignored especially for the development of 5 G communication technology, 16 as a result the master 40 and slave robots can be considered as two independent 35 and the influence of the time-delay in the controller design can be neglected. 41
Drawing inspiration from previous observations, a bilateral adaptive controller is proposed in this study to achieve synchronized force and position coordination with flexible performance during the operation process, 42 considering the uncertainties in the dynamics of both the master and slave manipulators, as well as the presence of external disturbances. 43 The proposed controller employs two reference impedance models based on linear second-order differential equations for the master and slave manipulators, utilizing a novel model reference adaptive law. The controller incorporates reference adaptive law and adaptive estimate law to facilitate convergence of the manipulator models to the reference models, while simultaneously minimizing the position error between the reference impedance model response position and the end-effector position of the dual manipulator, aiming for asymptotic convergence to zero. The Lyapunov stability theorem is utilized to ensure the stability of the closed-loop system and achieve robust position and force tracking performance with the proposed bilateral adaptive impedance scheme.
The remainder of this paper is arranged as below. In Section 2, both kinematic and dynamic models of the dual manipulators are introduced and the corresponding manipulator properties are also introduced. In Section 3, the overall structure design of the bilateral robust adaptive impedance controller is achieved. In Section 4, the bilateral adaptive impedance controller of the underwater teleoperation system is explained in detail and the stability analysis with Lyapunov-based stability theory is derived. The simulation verification of two degree of freedom (DOF) teleoperation system is completed in Section 5. In Section 6, an experimental setup of a single degree-of-freedom (DOF) teleoperation system is established to validate the force and position tracking performance of the dual manipulators with the designed controller. The experimental results provide evidence of the effectiveness of the proposed controller in achieving the desired force and position coordination during teleoperation. Finally, in Section 7, the main conclusions of the study are presented, summarizing the findings and contributions of the research. The whole structure instruction of the paper is expressed as Figure 1.

The whole structure instruction.
System formation
The dynamics of master and slave manipulators with a serial architecture modeled in the joint space are represented by the followingequations 44 :
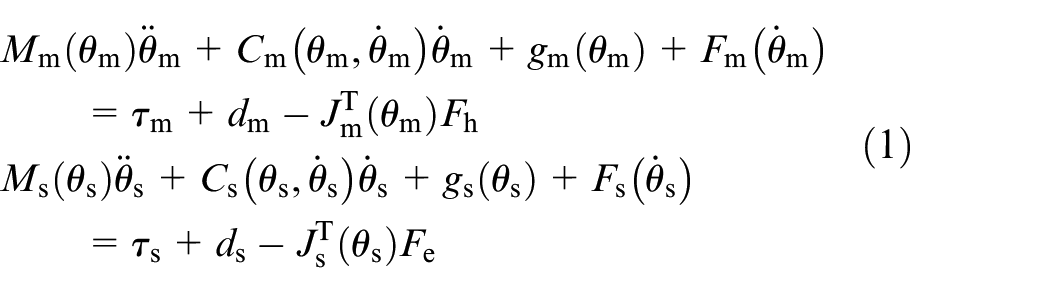
where
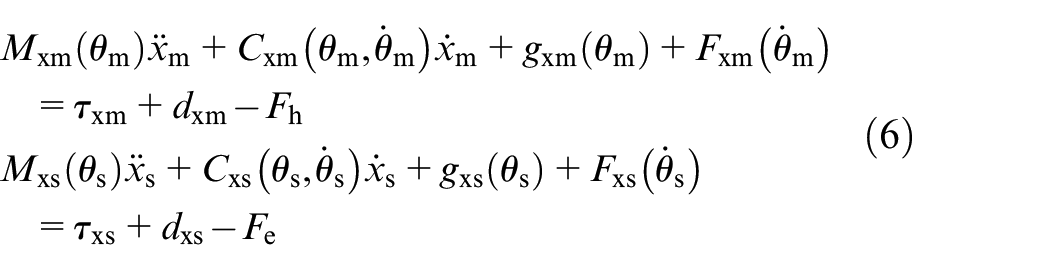
To achieve force and position tracking in Cartesian coordinates, the dynamics of the dual manipulator in joint space are transformed and expressed in the operation space:

where

Assuming that the manipulator joint is non-redundant, the Jacobian matrix

According to equation (1), the relationship between joint acceleration and acceleration in task space is described by:

According to equations (4) and (5),
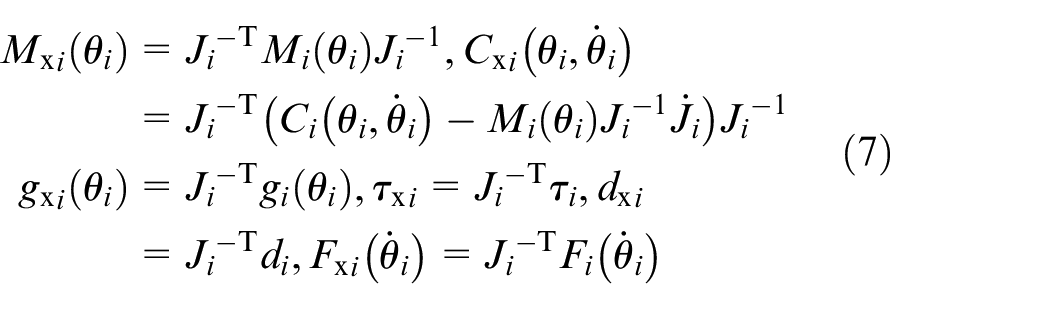
Combining equations (1) and (6), the relations of the dynamic matrices between the joint space and the task space with the non-singular Jacobian matrices
Generally, the same with the general teleoperation system, the n-link underwater manipulator system have the following properties:
Supposing the external unknown disturbance items
The overall control scheme
In the teleoperation system, the operator applies a force
The architecture of the bilateral teleoperation adaptive controller based on the reference impedance model is described in Figure 2. Two different impedance models are designed to achieve the interaction between the operator and the master manipulator as well as the interaction between the slave manipulator and the operation object to guarantee the coordination of master and slave force and position. The master controller with reference adaptive law and adaptive estimate law is utilized to achieve the manipulator model convergence to the master reference model. The slave system also incorporates a desired impedance model, established using the slave manipulator’s grasping force and the master operation position. The slave task space position is then tracked to the desired position using a robust adaptive controller. The objective of the reference adaptive impedance control, based on the desired impedance model, is to ensure coordinated force and position control between the master and slave manipulators while maintaining system stability in the presence of uncertainties such as joint friction and external disturbances. The design details of the master and slave controllers are elaborated in the subsequent section.
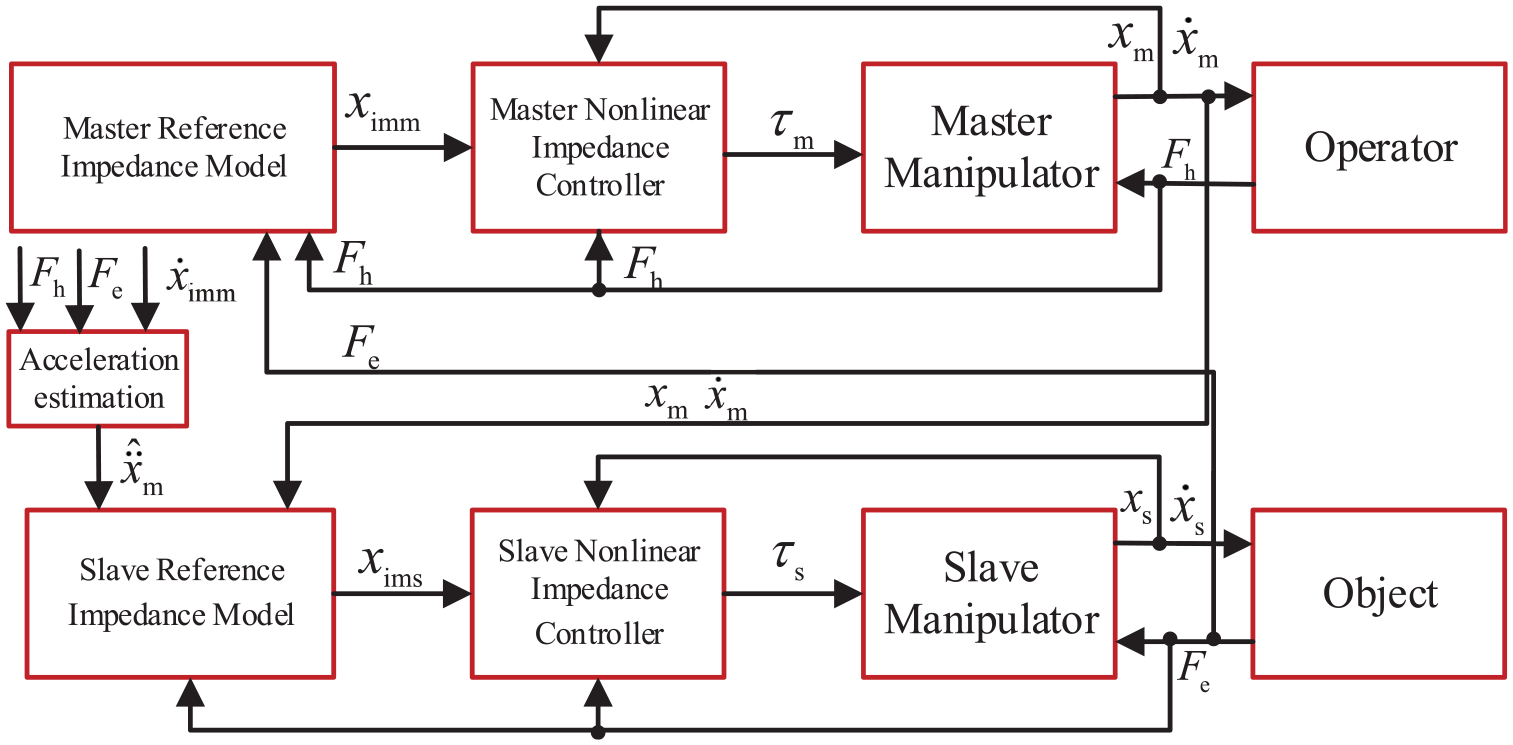
The control structure diagram of teleoperation system.
The controller design and stability proof
The controller design
The impedance control adjusts the target impedance model set by the user to make the manipulator end-effector achieve a flexible movement target, and adds impedance control to the adaptive attribute to make the tactile force signal of the master manipulator track the slave manipulator tactile force signal with robust performance under uncertain external condition. In the teleoperation system, two impedance models are defined based on the interaction between the master manipulator and the operator, as well as the interaction between the slave manipulator and the operation object. The desired impedance models for the dual manipulator are designed as follows 45 :


where


where
The auxiliary variables for the master and slave manipulators for the controller design are defined as
According to equations (12) and (13), suppose the parameters of the dynamics



where equations (16) and (17) are the master and slave closed dynamics with the controller equations (14) and (15). Design a Lyapunov function expressed as follows:

It is obvious that
Therefore, with the property that

The aforementioned expression makes sure the system global stability and global convergence with the proposed scheme when
where
Since the acceleration

Correspondingly the term
where
The term
The terms




where
The stability proof

where


where
Since
The same with the derivation method of
When
Since

From 0 to t, integrating both sides of equation (41), we can obtain:
Because
From equations (42) and (43) we can obtain
Simulation verification
In this section, a two degree of freedom manipulator as shown in Figure 3 is employed on the MATLAB/Simulink platform to verify the performance of the proposed controller. Only the uncertainty of the dynamic model of the manipulator and external disturbance are considered, and the influence of the carrier such as the underwater vehicle on the attitude of the underwater manipulator is ignored, so that the dual manipulators are assumed to move in the vertical plane.
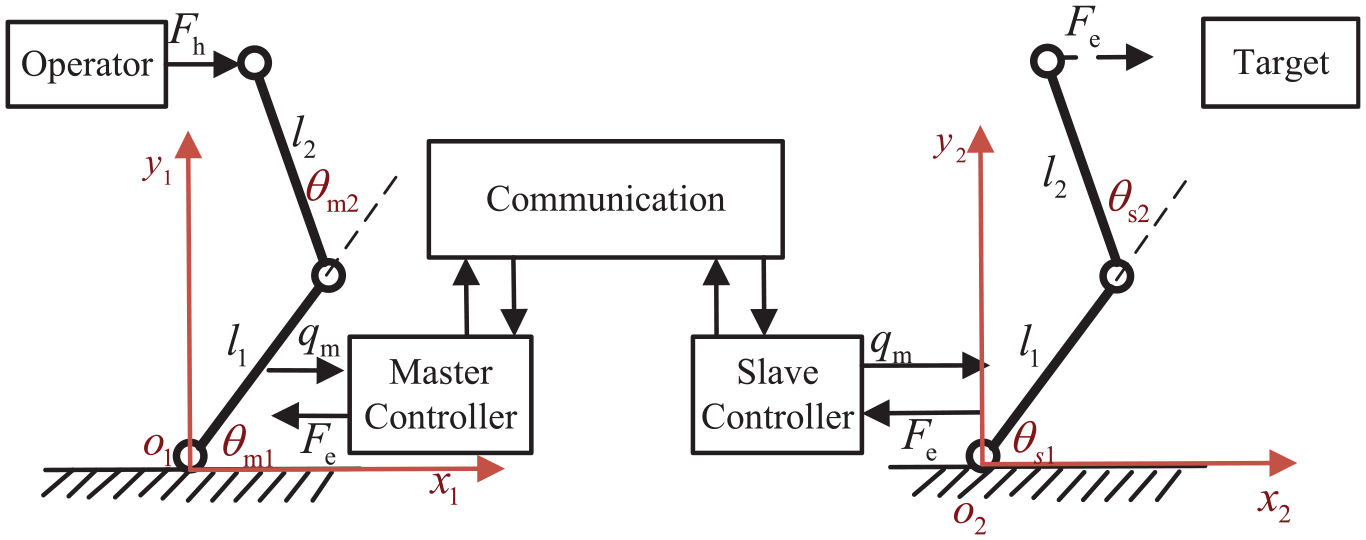
The control structure of two-link manipulator teleoperation system.
Assuming that the operating object is static, the force model of the operating object can be considered as a passive linear spring force model, 46 which can be expressed as:

The physical parameters and system parameters
The master parameters of the desired impedance model and master adaptive law are set as:
The similar to the master manipulator, the slave parameters of the desired impedance model and slave adaptive law are set as:
The master and slave adaptive law for the uncertain disturbance are respectively set as:
Simulation
The manipulator receptor is positioned at the end of the x-axis direction. In the first simulation, the master force
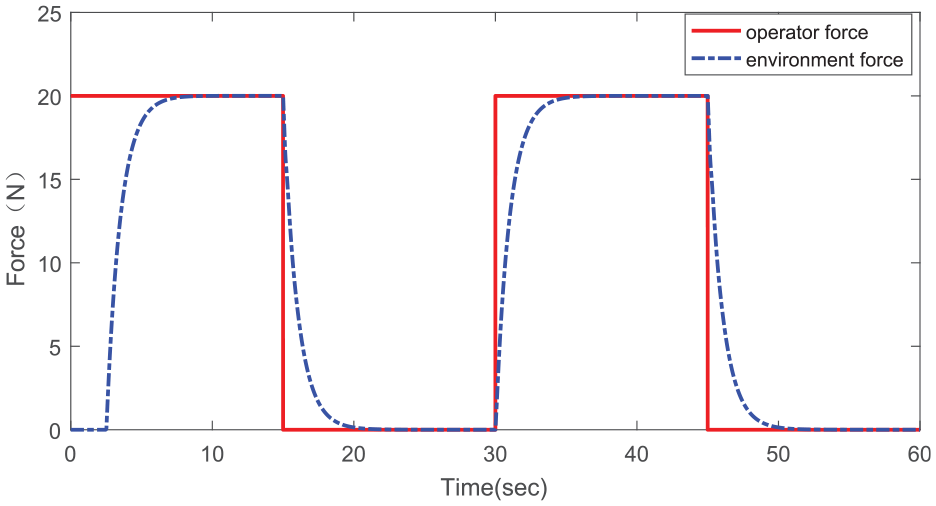
The force tracking results with square-wave signal.
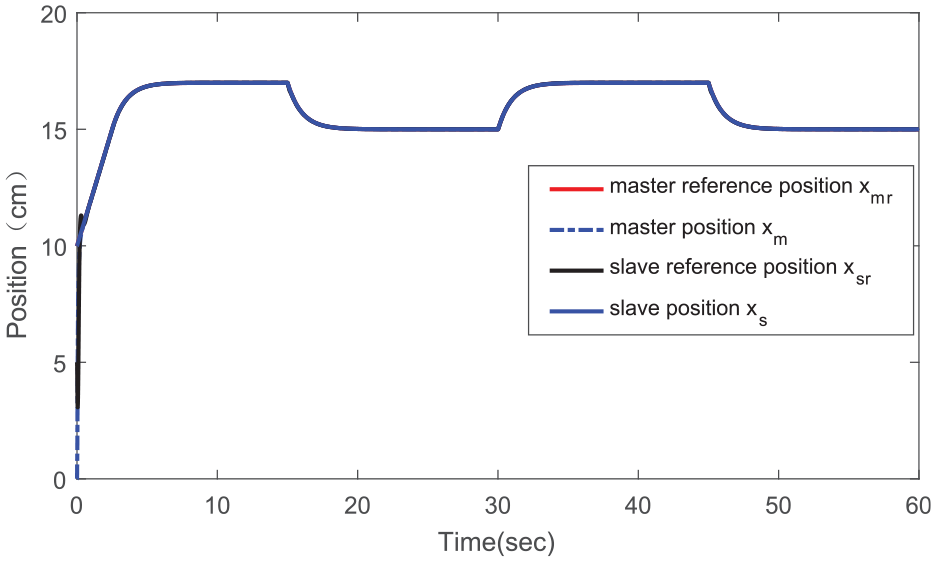
The position tracking results under Cartesian coordinate with square-wave signal.
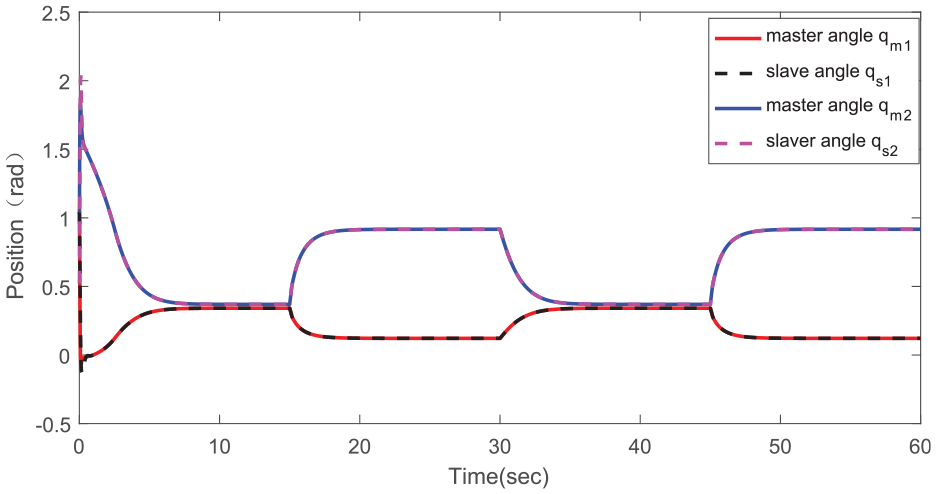
The angular joint tracking results with square-wave signal.
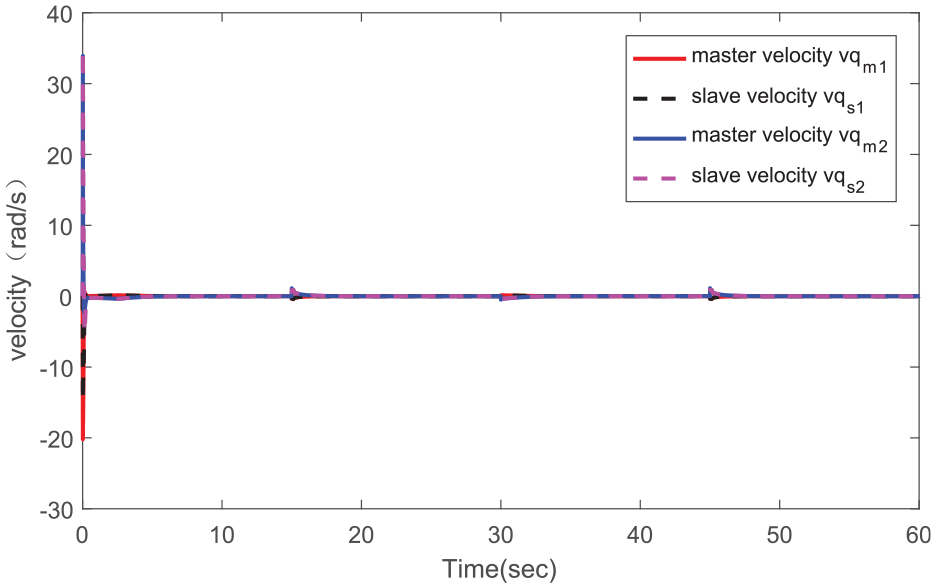
The angular velocity tracking results with square-wave signal.
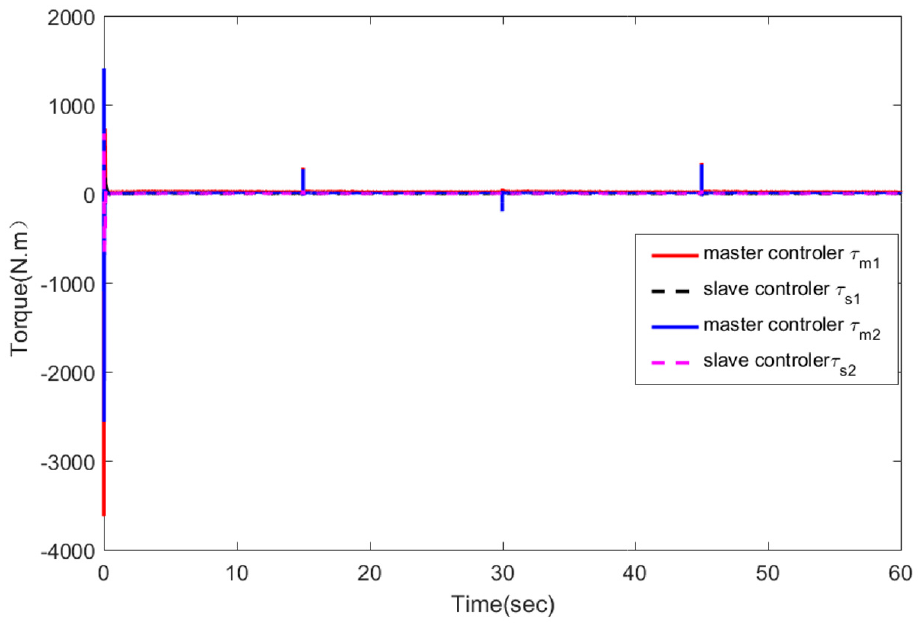
The controller curves with square-wave signal.
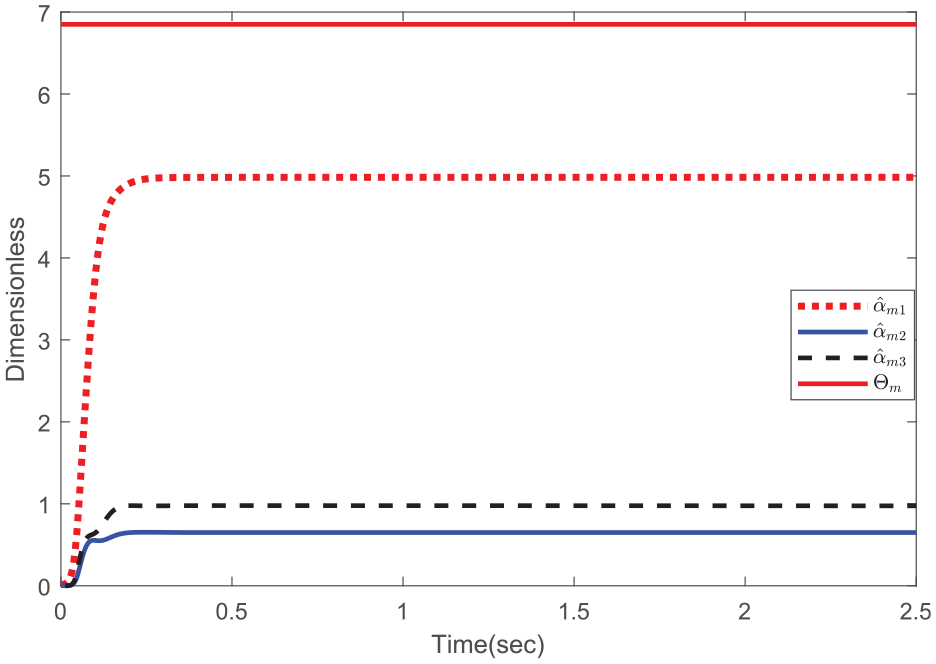
The master adaptive law estimation with square-wave signal.
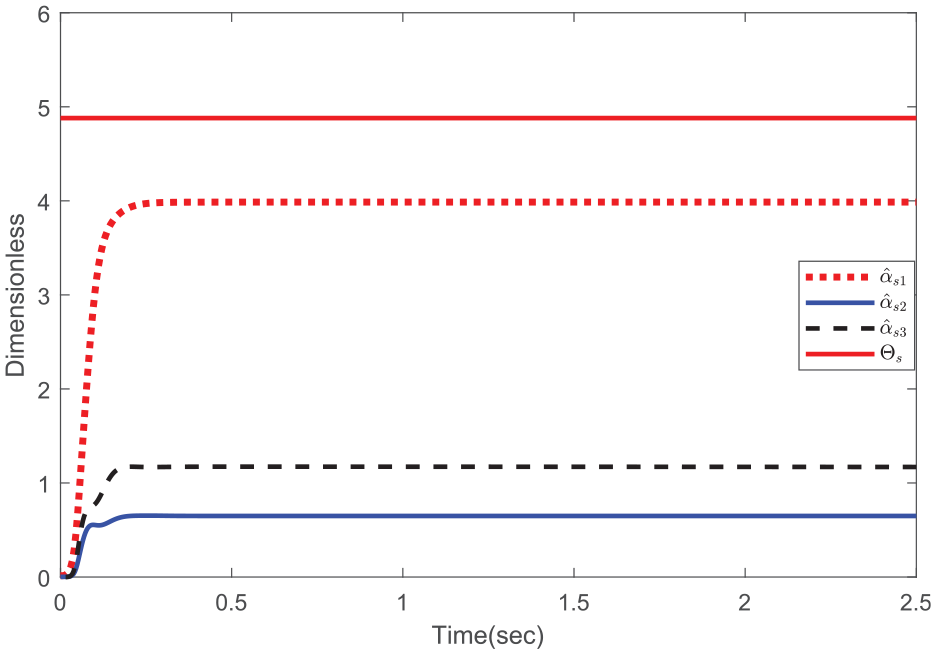
The slave adaptive law estimation with square-wave signal.
According to Figures 4 and 5, the master manipulator operator applied interaction force guarantees to track the slave force, at the same time, the slave manipulator achieves the position tracking of the master manipulator weather the slave manipulator exists in the free state or the contacting status with the operation target. The force applied by the operator on master manipulator is coordinated with the interaction force between the slave manipulator and the operating object. The bilateral adaptive impedance control realizes that the operator can sense the interaction force between the slave manipulator and the operating object while operating the master manipulator, and realize the consistent and equal position of master and slave manipulators, which increases the operator’s immersion and actual experience.
According to Figure 4, the master and slave operation space positions achieve to track of the positions of desired impedance model output respectively, and similarly the slave position realizes to track of the master position in joint space. The initial position of the slave manipulator is at a free position that is not in contact with the operation target. When the master manipulator position is tracked to 0.15 m, it can interact with the operation target. Currently, the slave manipulator still realizes the position tracking of the master manipulator. After interacting with the operating object on the slave manipulator, the master controller adjusts the operating force to converge to the interaction force between the slave manipulator and the operating object, so that the force tracking of the master to the slave manipulator and the position tracking error of the slave to the master manipulator gradually converge to zero.
Based on the results shown in Figure 4, the static errors in both master force tracking and slave position tracking are
It can be seen from Figures 4 to 8 that under the condition of uncertain system model and external disturbance, the overall system still guarantees the force tracking of the master to the slave manipulator and the position tracking of the slave to the master manipulator. The utilization of the model uncertainty adaptive law and the external interference upper bound estimation adaptive law allows for compensation of both external disturbances and model uncertainties, ensuring the robust stability characteristics of the system.
In the second simulation,
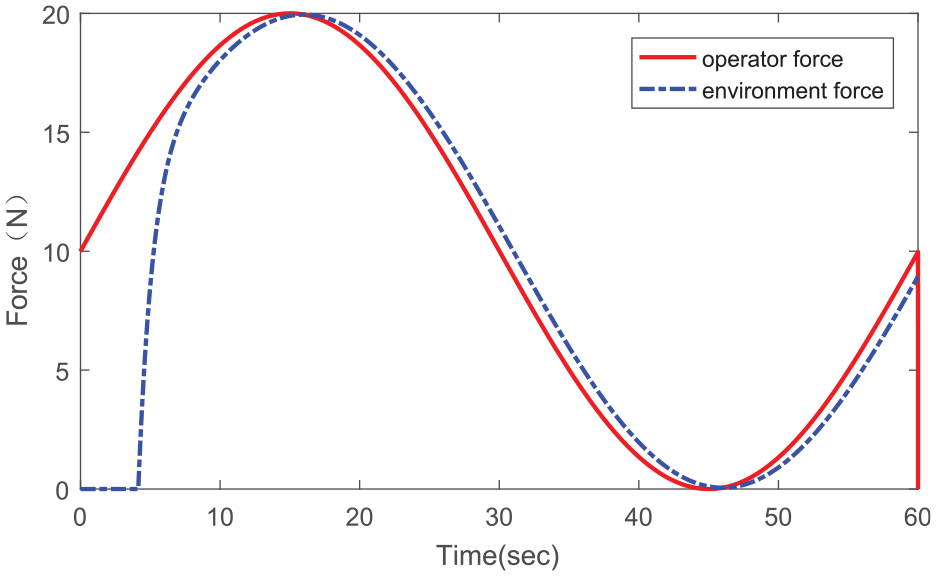
The force tracking results with sinusoidal signal.
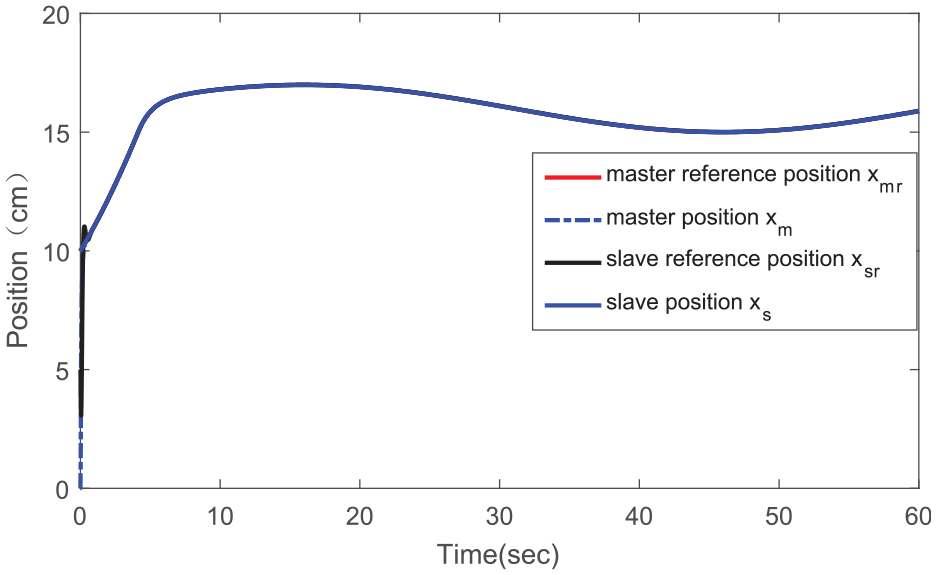
The position tracking results under Cartesian coordinate with sinusoidal signal.
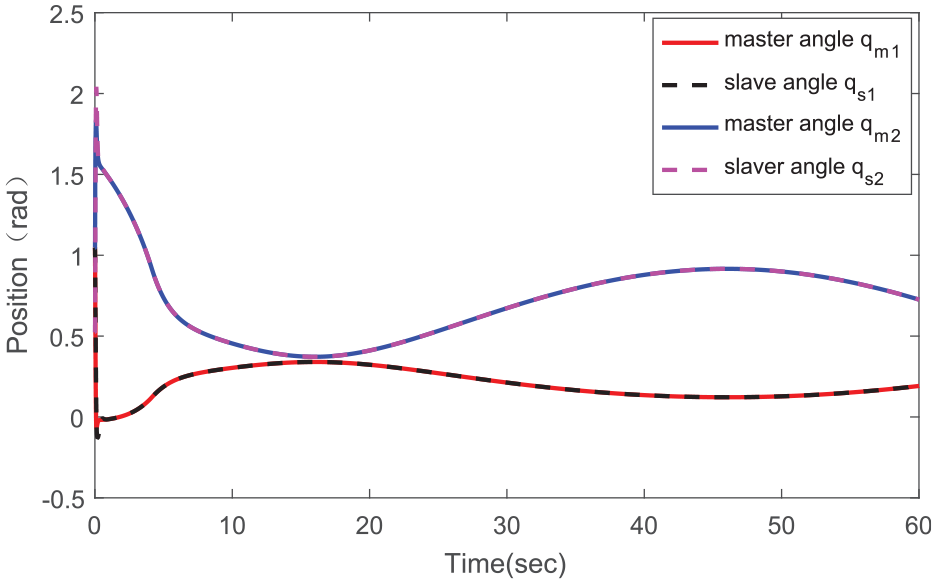
The angular joint tracking results with sinusoidal signal.
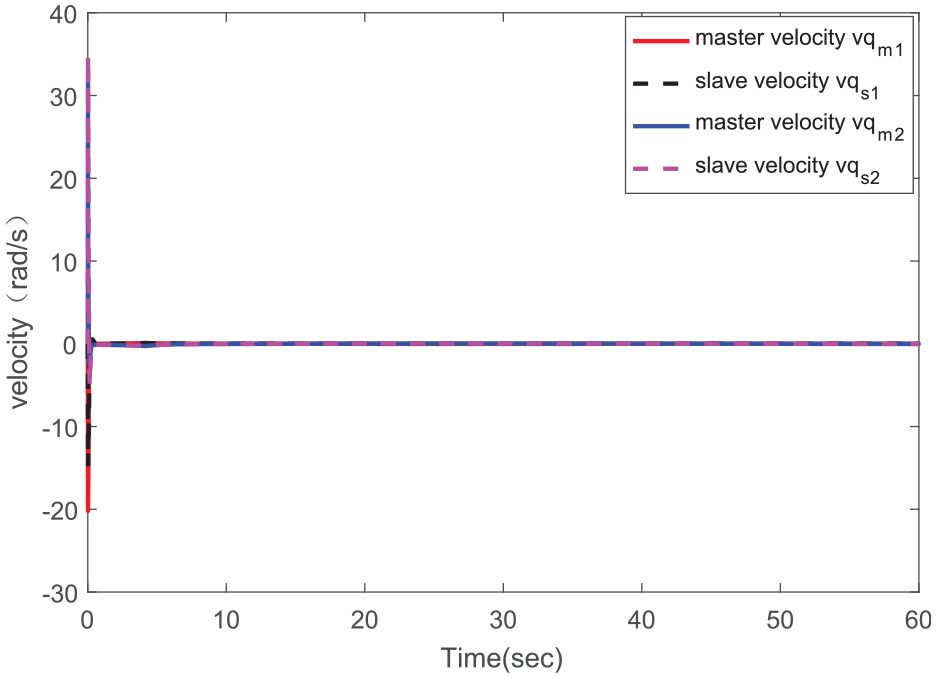
The angular velocity tracking results with sinusoidal signal.
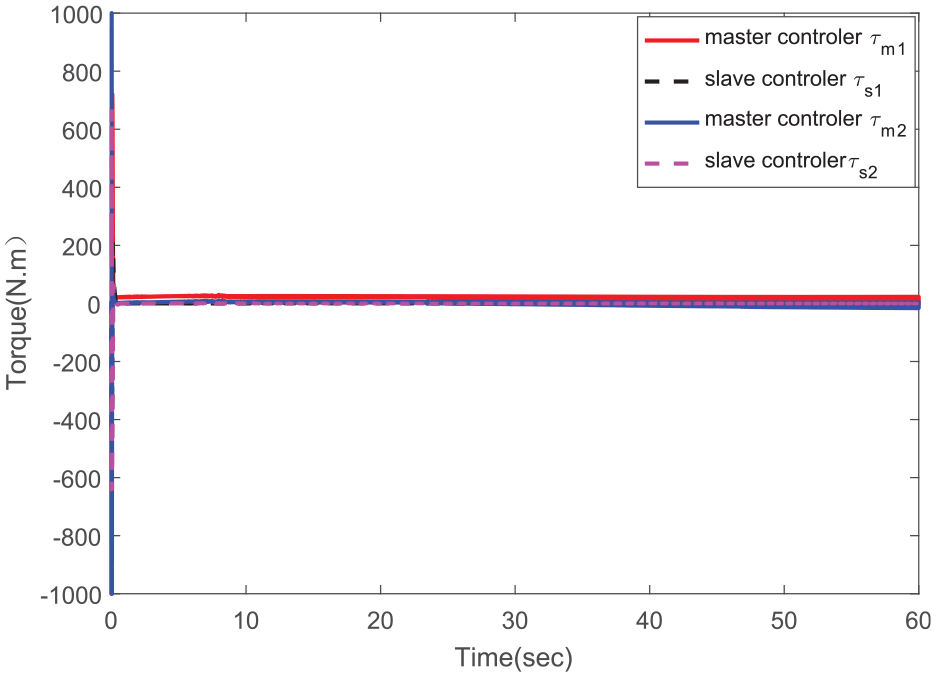
The controller curves with sinusoidal signal.
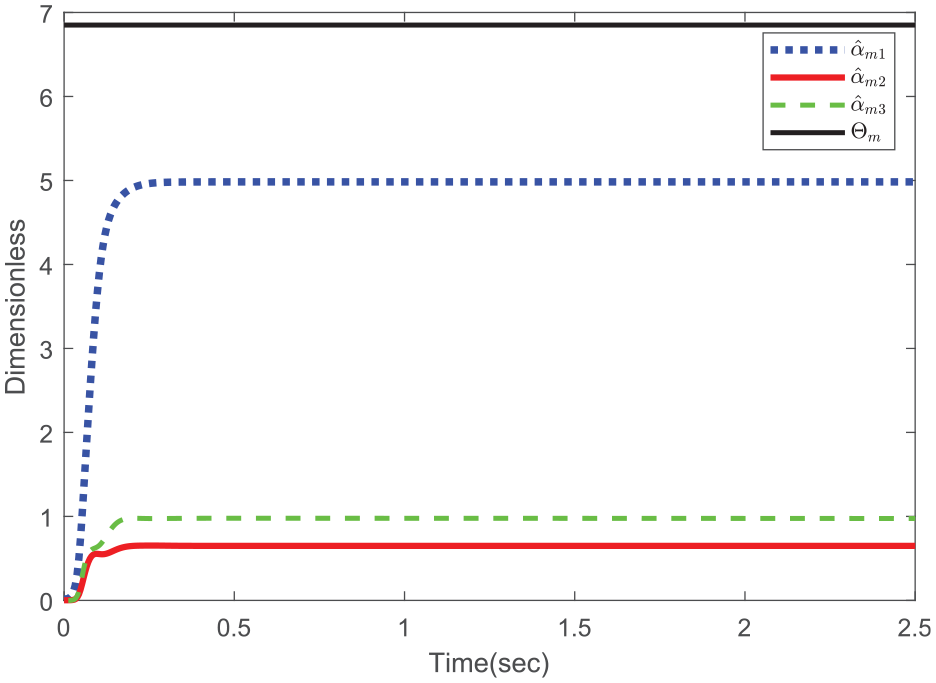
The master adaptive law estimation with sinusoidal signal.
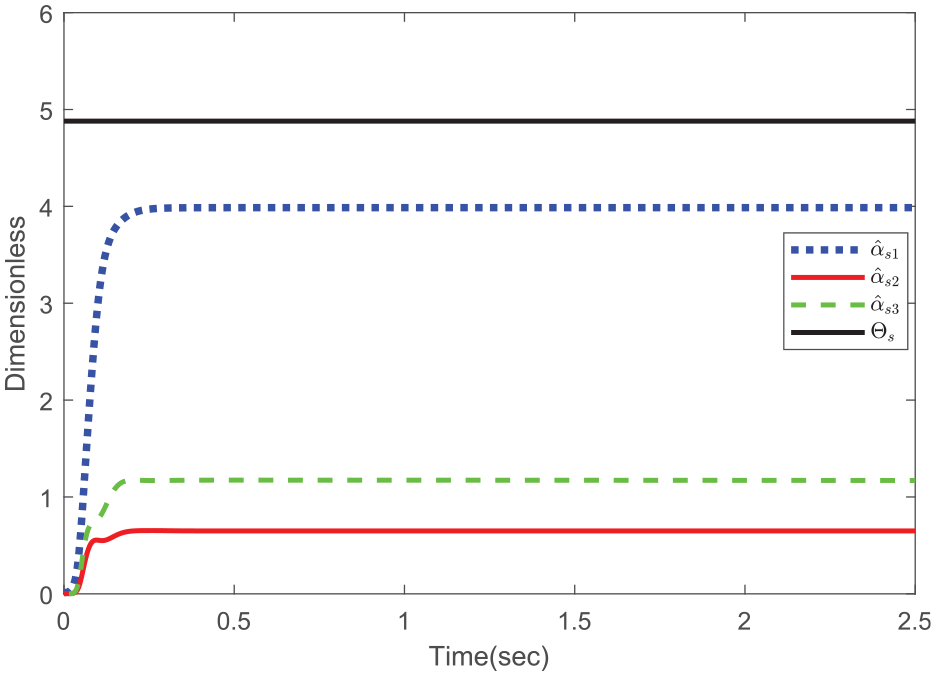
The slave adaptive law estimation with sinusoidal signal.
To verify the effectiveness and reliability of the newly designed approach, a comparison is made with the PD+like scheme as proposed in Ref. 47 and the model reference adaptive impedance control (MRAIC) as illustrated in Ref. 15 The manipulator dynamics are described by equation (1) and the two-link degree-of-freedom (DOF) serial teleoperation system shown in Figure 3 is subjected to joint friction and external disturbances. A 10 N force is applied in the x-axis direction on the master manipulator, and the force and position responses of the three controllers are recorded and depicted in Figures 18 and 19.
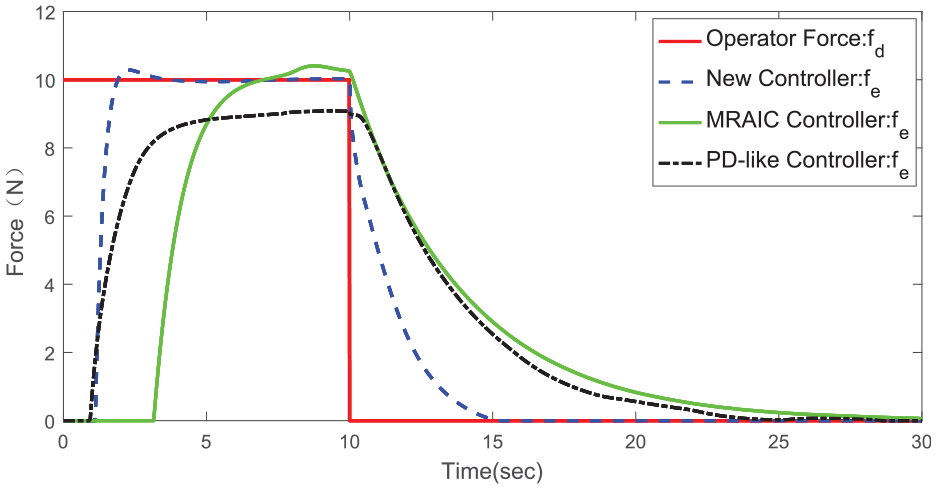
The curves of master and slave force in different controller.
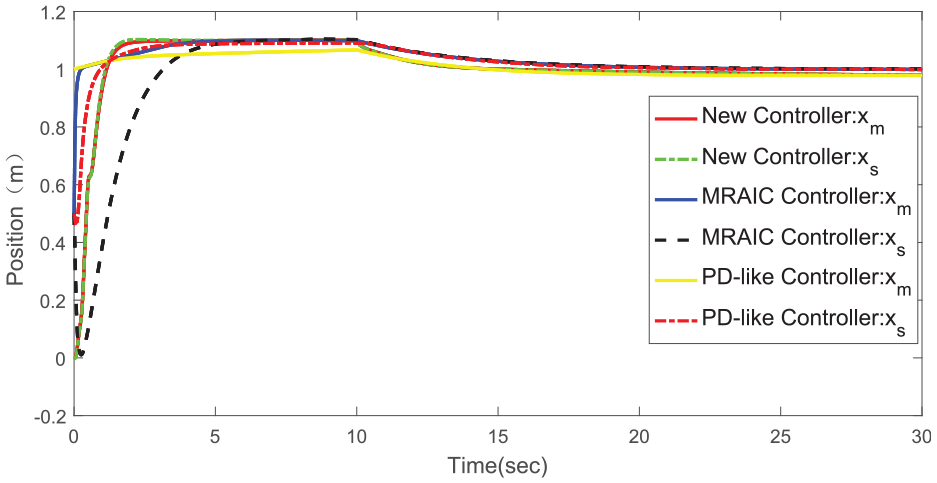
The curves of master and slave position in different controller.
From Figures 18 and 19 we can conclude that the proposed adaptive control strategy exhibits superior force-position tracking convergence performance compared to the other two controllers, especially in the presence of system uncertainty and external disturbances. The response of the designed approach is with the characteristics of little overshoot and no static errors, and the response shacking is suppressed with the new controller under external disturbances.
Experimental verification
According to the simulation verification above, an effective performance of force and position tracking ability is investigated with the proposed approach. For the further research and verification, a single DOF manipulator teleoperation experimental system is set up with the proposed controller. Similar to the simulation system, the whole structure diagram with the proposed controller is expressed as Figure 20.
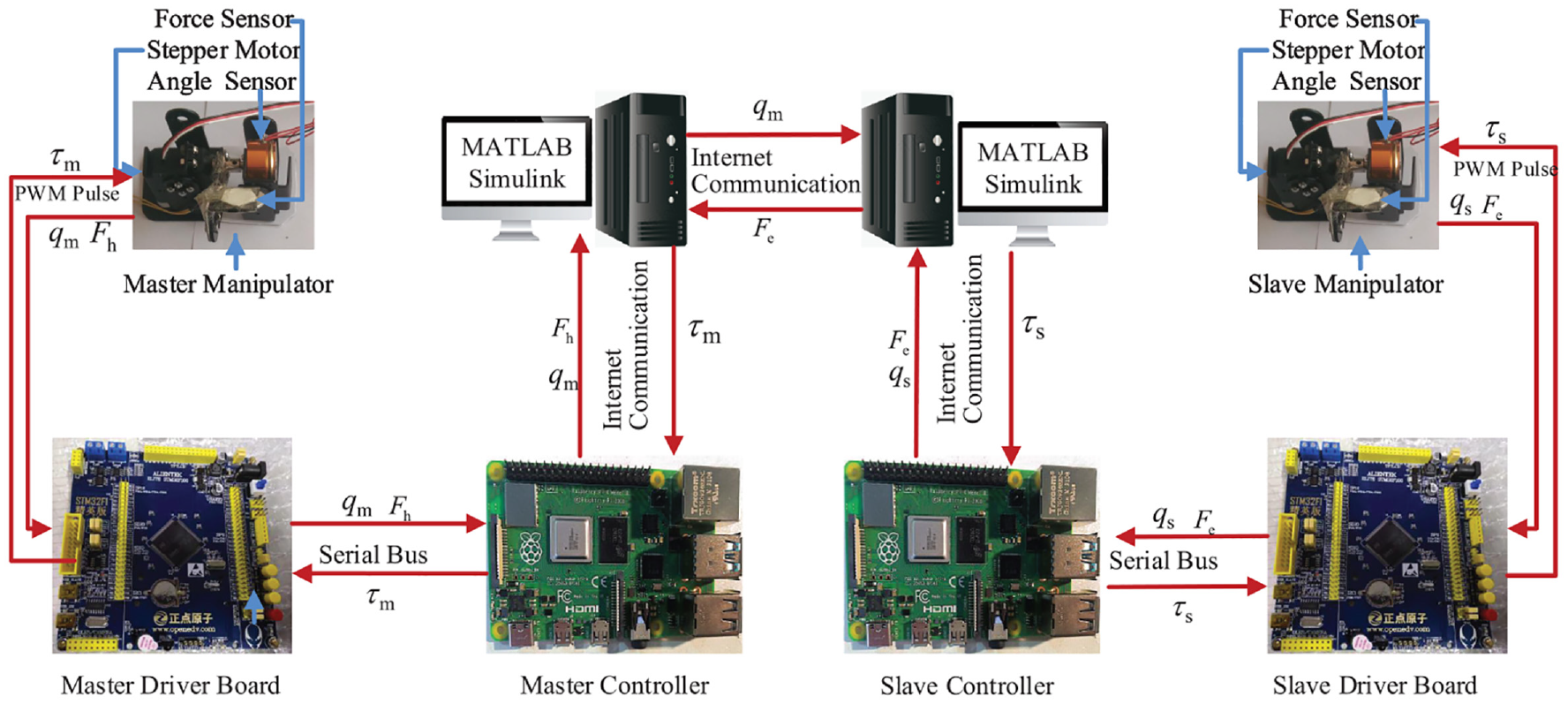
The experiment setup of single joint teleoperation system.
Both the master and slave manipulators are designed with the same structure. They consist of a single degree-of-freedom(DOF) manipulator driven by a stepper motor to achieve drive torque output. An angle sensor is coaxially connected with the linkage to measure the rotation joint position. Additionally, a piezoelectric film type tactile force sensor is installed at the force sensing point of the linkage end to measure the force exerted by the master operator.
The master driver board is responsible for acquiring the angle and tactile force signals through A/D conversion. It also receives the control law for the master manipulator from the master controller through the serial bus and sends the collected force and position information of the master manipulator back to the master controller through the same serial bus. The master controller is connected to the master host computer via the internet, and it transmits the master force and position signals to the master computer. It also receives the control law from the master host computer, which is then converted into PWM pulse performance and sent to the master driver board for execution. The master host computer mainly runs the Matlab/Simulink platform, which supports the Peter Corke and Haviland’s robot toolbox 48 and supports the hardware board structure. The hardware support is realized by installing the driver package in the Matlab environment. The Matlab/Simulink platform obtains the master position and force information from the master controller, simultaneously it obtains the slave position and force information from the slave host computer with internet communication. The robot toolbox and the single DOF manipulator model are used to calculate the adaptive impedance control law, and the solution control law is sent to the master controller.
Simultaneously, the Matlab/Simulink platform running on the master computer transmits the master position and force information to the slave host computer via internet communication. Similarly, the slave host computer runs mainly on the Matlab/Simulink platform. It receives the slave position and force information through internet communication from the slave controller. By combining this information with the master position and force information, the slave adaptive law is calculated and transmitted back to the slave controller. At the same time, the slave position and force information are also transmitted to the master host computer.
The slave controller obtains the control law from the slave host computer, and converts it into PWM pulse performance and sends it to the slave driver board. At the same time the slave controller obtains the slave force and position information from the driver board and transmits it to the slave host computer. The slave driver board is responsible for collecting the force and position signals through A/D conversion. It also controls the slave stepper motor using PWM pulse signals. The Matlab/Simulink platform supports the robot toolbox and supports hardware boards such as the Raspberry Pi. Choosing the Raspberry Pi 4B as the controller of the master and slave manipulators, which is equivalent to a microcomputer and it supports network communication and serial communication.
The A/D conversion process is used to obtain force and position signals as shown in Figure 21. We express the force unit in mV instead of N, as the true force value is not required for this experiment. It is important to emphasize that the accuracy and precision of the A/D conversion process are critical to the success of this experiment. Any errors or noise in the A/D conversion process can have a significant impact on the quality of the acquired signals. Therefore, it is imperative to ensure that the A/D converter is correctly calibrated and that the input signal is within the valid input range.
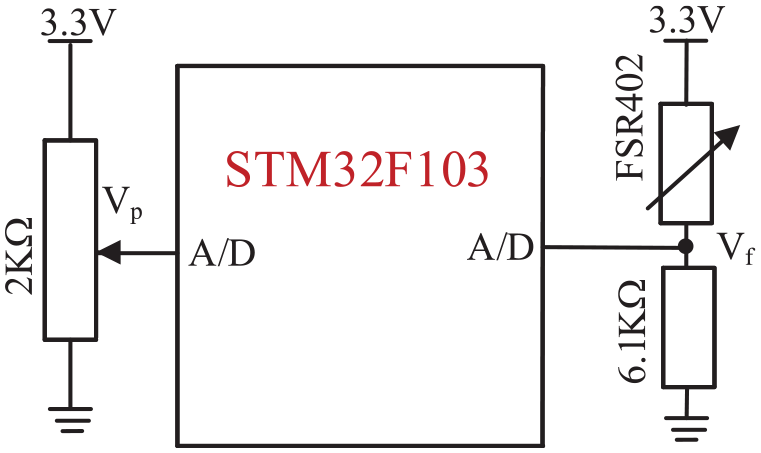
The measurement principle of force and position signal.
In conclusion, this experiment highlights the use of A/D conversion for force and position signal acquisition using a tactile force sensor and a precision conductive potentiometer. The A/D conversion process’s accuracy and precision are crucial factors for the experiment’s success, and care must be taken to calibrate the A/D converter correctly and ensure a valid input signal.
In order to better display the effect of the experiment, directly sensing the stiffness of operation object and avoiding to block the stepper motor of the slave manipulator with force insufficient contacting the force sensor, the virtual force

The uncertainty disturbance is added to the dynamic model in the linkage in Matlab/Simulink environment. The direction of the master and slave force denoted as
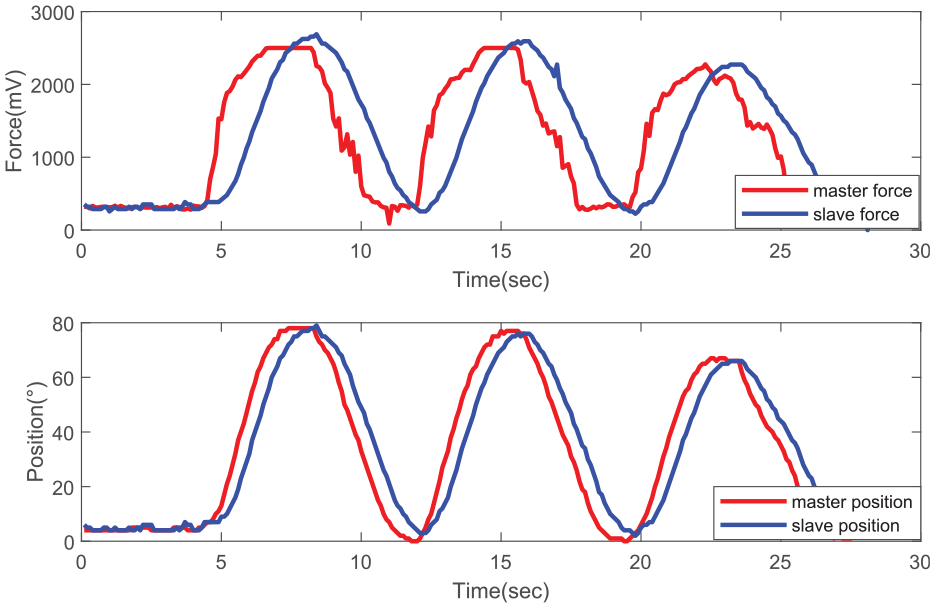
The force and position tracking curves
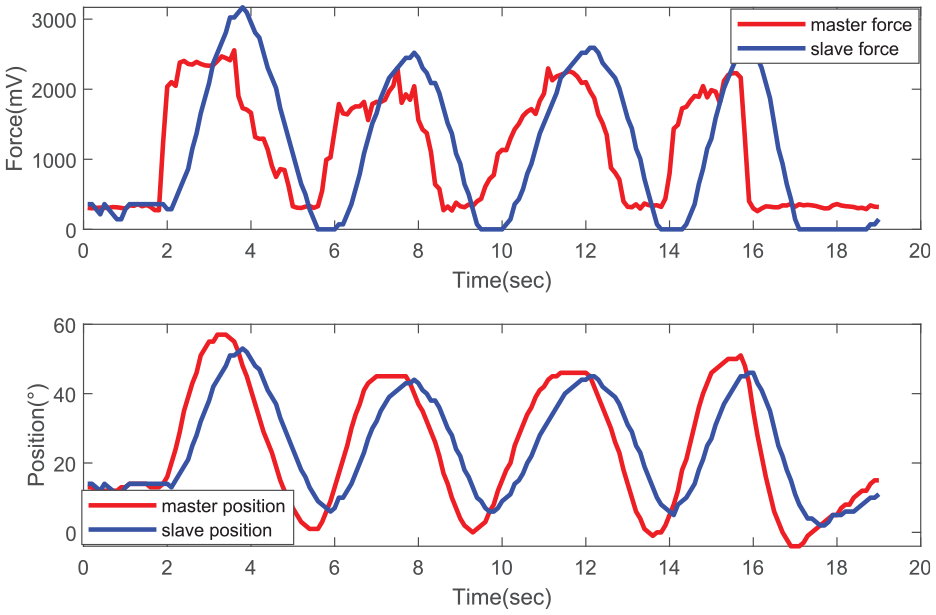
The force and position tracking curves
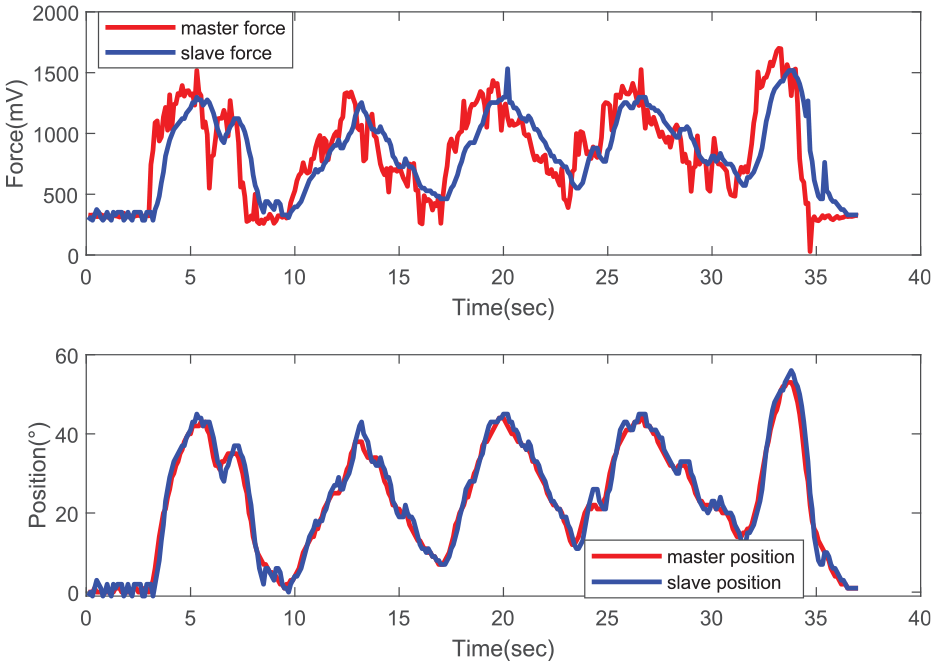
The force and position tracking curves
According to Figures 22 to 24, it can be concluded that the force and position asymptotic convergence of the dual manipulators is achieved with the controller under the force periodically applying and releasing on the master manipulator. The response characteristics of the master force tracking and slave position tracking are fast following response and small overshoot. The controller ensures the operator who applying force on the master manipulator can immediately sensor the slave’s operation force. After master force released, the dual manipulators still guarantees the force and position coordinated synchronization and finally the dual manipulators stay at the critical position with the operation object.
It is evident from Figures 22 to 24 that even with an uncertain system model and external disturbances, the overall system maintains the force tracking of the master to the slave manipulator and the position tracking of the slave to the master manipulator. This achievement is attributed to the implementation of the model uncertainty adaptive law and the adaptive law for estimating the upper bound of external interferences, which effectively compensates for both external disturbances and model uncertainties, thus ensuring the robust stability characteristics of the system. The designed control law for the master-slave robotic manipulators ensures consistent synchronous performance in the teleoperation system, and guarantees the system stability and robustness.
According to Figures 22 to 24, the rotation angle range is
Conclusion
To achieve compliant operation of the slave manipulator while compensating for uncertainties in the manipulator model parameters and external disturbances, we propose a novel bilateral model reference adaptive impedance controller that achieves force and position coordinated synchronization. Two robust adaptive controllers are designed to compensate for uncertain errors in the master and slave manipulator models. In the robust adaptive controller process, the adaptive law estimates the upper bound of external disturbances, ensuring the closed-loop dynamics of the master and slave manipulators are consistent with the reference impedance model. The Lyapunov candidate function is employed to prove the tracking performance and global stability. We conduct two degrees of freedom teleoperation simulations with the robust adaptive controllers on the MATLAB/Simulink platform, verifying the force-position tracking asymptotic convergence ability. Finally, a single degree of freedom teleoperation system is set up to verify the designed controller.
The results show that the proposed controller has good force-position tracking performance under the influence of model parameter uncertainties and unknown external disturbances, and the overall system exhibits good stability and strong robustness. The proposed model uncertainty adaptive law and the external interface upper bound estimation adaptive law provide the compensation of the model uncertainty and external disturbance, ensuring the force and position tracking ability and the features of the robustness and stability.
Footnotes
Appendix
The inertia matrix
The Centripetal and Coriolis matrix
and also the gravity torques vector
where the gravity acceleration
The Jacobian matrix
The elements of the slave Jacobian
where the unit of
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Key Scientific Research Projects of University in Henan Province(No.24B413003), The Basic Research Business Fund Special Project of Henan Polytechnic University(No. NSFRF230434), Natural Science Foundation of Henan (No.232300421152) and Henan Province Scientific and Technological Project of China (Nos.232102240036, 232102220030, 232102240103 and 232102211004).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.