
Abstract
This article presents the review of modeling and control during the airdrop process of transport aircraft. According to the airdrop height, technology can be classified into high and low altitude airdrop and in this article, the research is reviewed based on the two scenarios. While high altitude airdrop is mainly focusing on the precise landing control of cargo, the low altitude flight airdrop is on the control of transport aircraft dynamics to ensure flight safety. The history of high precision airdrop system is introduced first, and then the modeling and control problem of the ultra low altitude airdrop in transport aircraft is presented. Finally, the potential problems and future direction of low altitude airdrop are discussed.
Introduction
Through airdrop process, personnel and/or goods from airplanes can be released and transferred to the predestined places by parachute (see Figures 1 to 3). Thus, airdrop plays very important role in military and civil field. As the news 4 claimed in August 2014, the airdrop was conducted by one C-17 and two C-130 cargo aircrafts that together dropped a total of 72 bundles of supplies, including food and water for thousands of Iraqi citizens threatened by the Islamic State of Iraq and the Levant on Mount Sinjar, Iraq. Airdrop ability is an important indicator of national defense force and the significant means for rapid response and long-distance maneuvers in modern war. US Army has repeatedly used the transport aircraft (such as C-17 and C-130) in the Iraq and Gulf War to carry and drop supplies to troops at ultra low altitude. Nowadays, transport aircraft has become one of the types to be equipped by air force. Although the powerful countries (such as United States and Russia) have developed and equipped lots of transport aircrafts, the European countries have developed the A400 transport aircrafts together to break the monopoly of United States in transport aircraft field and enhance national defense capabilities. The C-5, C-17, and C-130 of United States and Russia’s IL-76 are the most representative military transport aircrafts in the world.

XC-2 test. 1

C17 airdrop of Humvee. 2

An M551 Sheridan being dropped from a C-130 hercules. 3
Precision airdrop is challenging since winds greatly affect the airborne operation and it is particularly true for cargo parachute deliveries without guidance control. In the study by Carr et al., 5 the wind field is measured using lidar wind profiling system and the objective is to permit real-time determination of ballistic winds and improve airdrop accuracy from high altitudes. To reduce the cost of guidance, navigation, and control systems, the low cost parachute system is analyzed where the system descends at high speeds and at the appropriate altitude, the main parachutes are deployed to minimize the wind effect and to reduce the system velocity. 6 In the study by Ward et al., 7 the in-flight system identification for autonomous airdrop system is used for system control and it shows that the method provides better estimates of system dynamics than a precomputed model. The work is further extended in the study by Ward and Costello 8 where the glide slope control strategy is proposed and the experiment shows that the landing with glide slope control is generally closer to the target in comparison with basic control algorithm. In the study by Calise and Preston, 9 the flocking of parafoil-based systems is studied by mimicking the behavior of biological system and neural networks is employed to achieve adaptive design.
According to the airdrop height of transport aircraft, the airdrop technology can be classified into two types: high altitude and ultra low altitude airdrop. High altitude airdrop dropouts and deliveries the troops or material to the ground by parachute at high altitude. The conventional high altitude airdrop method that the cargos use its gravity and parachute to fall down freely has been for long time an application direction and got considerable interest. Although the high altitude airdrop is simple and easy to implement, shortcomings are summarized as follows: Airdrop droppoint is lack of accuracy since the airdrop height point has long distance to ground and it is difficult for the pilot to confirm airdrop placement point. Airdrop accuracy is prone to be affected by the flight height, regional terrain, and weather condition. The longer the cargo moves, the more possible to be deviated from airdrop placement point. The required dropping zone area is large, and it’s hard to collect force quickly and prone to be attacked by the enemy, which limits the maneuvering performance.
During the ultra low altitude airdrop process, aircraft glides and flares to the height of 1.5–5 m up to ground first and then transfers to level flight. The cargo will be pulled out from fuselage by the extraction of parachute and fall down the ground directly. After the cargo dropout, aircraft will pull up and complete airdrop. Although the modern precision guidance and control technology’s introduction have dramatically improved the performance of high altitude airdrop system, the advantage of ultra low altitude airdrop is as follows: Airdrop precision is easy to realize since distance between aircraft and ground is short and there is little drift impact. In this way, the heavy cargo, such as tank helicopter, can be airdropped. The field limit is greatly reduced since the height is low and the equipment can be dropped more easily. The timeliness of weapon movement and displacement is strong, which ensures the war to be time efficient.
Nowadays, the ultra low altitude airdrop has attracted increasing attention by many countries and can enhance national defense power. However, there is danger during this process. In the study by Chen Jie and Heyong, 10 with the computational fluid dynamics (CFD) approach to analyze the ground effect on airplane’s aerodynamic parameters with forward or asymmetrical lateral obstacles, results are shown in Figures 4 and 5, and it indicates that the airplane is induced to touch the ground since the obstacles on the ground can deteriorate the flight system stability. Great challenges are raised on the ultra low altitude airdrop:

Lift coefficient parameter variation. 10

Pitch moment coefficient parameter variation. 10
As transport aircraft flights near the ground, low altitude makes aircraft control more difficult, and the aircraft is prone to crash ground if the flight altitude cannot be controller in certain safe domain.
The terrain or low altitude environment, such as mountain, buildings will bring impact to aircraft’s flight and change the dynamic characteristic of aircraft dramatically so that the high precision trajectory follow and attitude control should be guaranteed even that the flight speed is slow as ultra low altitude airdrop process. The above-mentioned problems will be more obvious and dramatic with big transport, as it has very big span and anhedral angle, which makes the main wing closer to ground compared with aircraft’s center of mass (COM).
Due to the sun’s radiation and other factors, the air flow in low altitude is more complex than the case in high altitude, and the aircraft is vulnerable to strong crosswind. Once the control law cannot control the aircraft’s track smoothly, such effect of crosswind will make the aircraft to deviate from appointed airdrop zone, miss the airdrop chance, and the serious problem is, instable flight attitude may cause the wingtip touch the ground directly or even make the aircraft crash.
During the heavy cargo airdrop process, moving of the cargo inside the aircraft will introduce the variation of the whole system’s COM and aircraft’s rotation inertia. Meanwhile, as cargo dropout, both the mass, COM and aircraft rotation inertia will mutate at the same time. Thus, the aircraft model before and after airdrop is with quite different aerodynamics.
High altitude precision airdrops
The goal of high altitude precision airdrop is to complete airdrop mission rapidly, accurately, and with low cost. With guidance and control system on airdrop, transport aircraft can flight to the spatial point far away from the airdrop point and then dropout the cargo. With the aerial maneuvering and controlled flight system, cargo or load can approach the landing point through long distance flight, and the airdropping precision will be greatly improved while the landing point selection is also more flexible.
Precision airdrop system greatly improves the performance of traditional high altitude airdrop, enhances the combat capability, and has been extensively studied domestic and overseas. Currently, the precision airdrop system can be divided into three categories: passive, active, and hybrid.
Passive precision airdrop system completes landing trajectory planning beforehand, which requires the full knowledge of spatial wind field, atmospheric density, parachute’s shape, size, weight, form of umbrella opening and inflating, hanging way, load’ weight, size and shape, and so on, comprehensively. Based on parachute aerodynamic model, spatial wind field model, and the aerodynamic model, using the wind field data collected by ground weather station and meteorological satellite, the landing trajectory will be designed, and then the airdrop point will be confirmed. When the transport arrived at the airdrop zone, dropsonde will be dropped out first to collect the wind field and other data, which will be transmitted back to computer, and used to correct preplanning landing trajectory, confirm the new airdrop point. In the end, the cargo-parachute system will be dropped out to complete the airdrop mission. In this system, the role of parachute is to guarantee the safety of cargo’s landing. For the passive precision airdrop system, the landing precision highly depends on information’s integrity and simulation model’s credibility, and airdrop mode has been widely used in the early stages of development, such as the Precision Airdrop System (PADS) precision system in the United States, which was sponsored by the US Air Force and Army, supports portable, low-cost ground and in-flight high altitude mission planning for ballistic and autonomously guided system payloads (Figure 6).
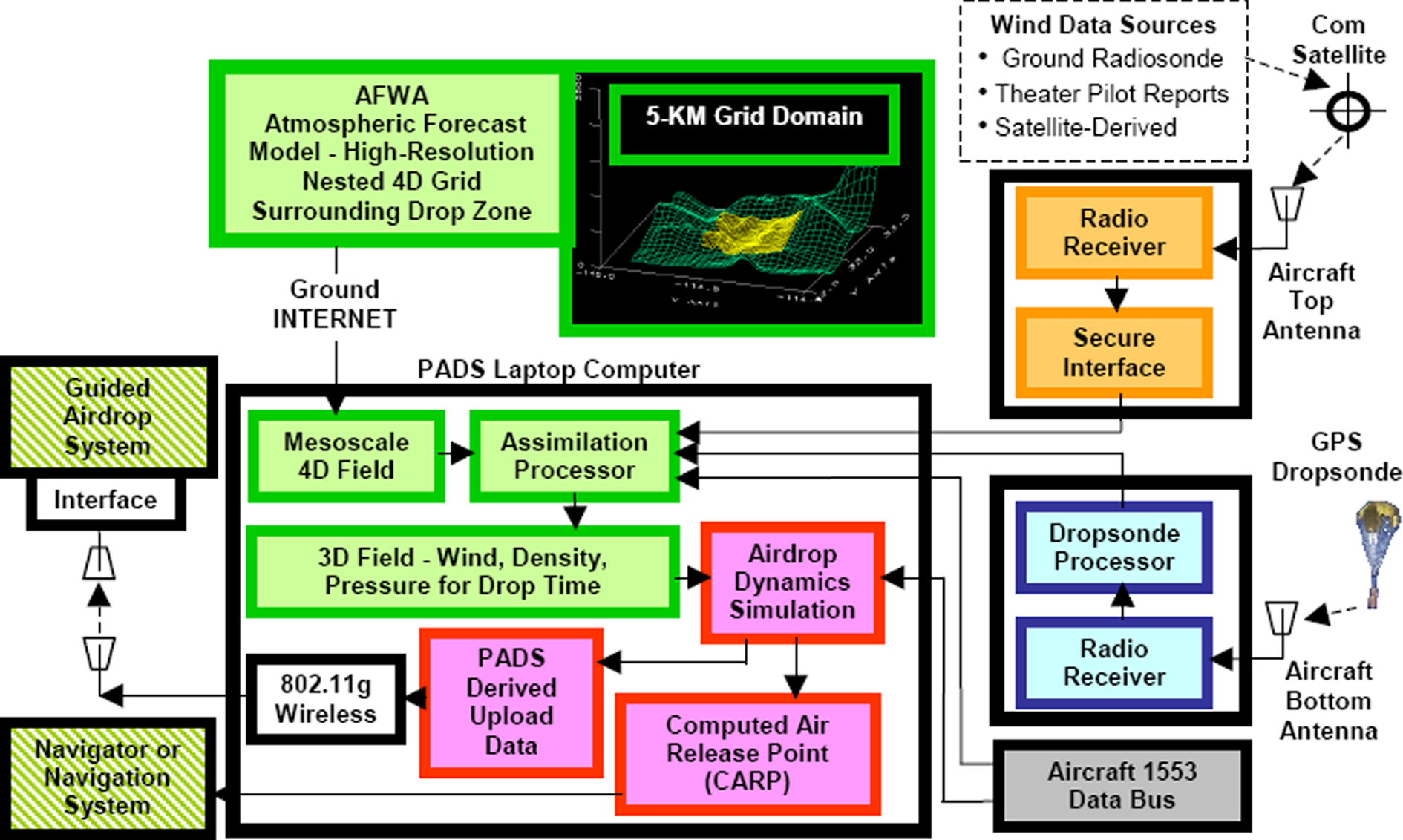
PADS architecture and top-level functions. 11
In the other aspect, active precision airdrop system can control the cargo-parachute system’s landing trajectory precisely, which requires that the cargo-parachute system has strong maneuvering and autonomous flight capability. Such method can be used in case of unknown information of drop point, uncertain parachute system model and wind field model, or under the condition that the passive airdrop system cannot guarantee airdrop precision and fulfill other requirements. Cargo-parachute system can locate and control its flight accurately by itself, and in this way, the cargo can reach the target point autonomously. At present, active precision airdrop is popular; the representative systems are the semi-rigid deployable wing precision system in the United states, controllable airdrop system (CADS) in the United Kingdom, “Spade” small parachute autonomous airdrop system in the Netherland.
Hybrid mode combines these two methods above, with both the landing trajectory planning in the early stage and landing trajectory controlling in the end. Compared with the other two modes whose cargo-parachute system is highly reply on spatial wind field information, parachute system model, wind field model, maneuvering capability demand hybrid mode integrates all their merit, and has become the mainstream development of precision airdrop system. With the enhancement of airdrop systems’ delivery, the accuracy is higher and distance is longer, thus the strategic and tactical application of airdrop has also been greatly expanded. The technology improves the overall deployment and support ability of army.
Aerodynamic model of ultra low altitude airdrop
The research on high altitude airdrop in the world has been evolved to high precision airdrop system development, which is mainly focused on the flight control of parachute-cargo system, and not related to flight control of transport aircraft. As discussed earlier, for ultra low altitude airdrop, the critical problem is the transport’s flight safety during the airdrop. With this concern, much attention is paid on the aerodynamic modeling of transport aircraft with cargo moving in the hold or drop out from hold. Modeling problem of transport with ultra low altitude airdrop is studied in the work by Ouyang and Ding.
12
During the cargo movement, the dynamics is time-varying while at the point of airdrop, there is sudden change of the dynamics. To control such process, the first step should describe the process and thus two basic approaches, namely integral method and separation method, are employed to build up the transport aircraft’s mathematical model with airdrop. Subsequently, the comparison analysis and effectiveness simulation verification about these two methods have been explored in the studies by Zhang et al.
13
and Gan.
14
In the study by Yang and Lu,
15
the pull ratio of parachute and parachute opening process is introduced into model analysis for the ultra low altitude airdrop process, and parachute’s effect on airdrop has been analyzed based on the simulation of different cargo mass, pull ratio, and parachute opening process. The assumption condition is relaxed in the study by Li et al.,
16
and the floor angle factor in the hold has been introduced into modeling. Generally speaking, the following assumption in modeling of transport aircraft with cargo moving is made: The cargo moves in a straight line along the X-axis of aircraft’s body frame. Cargo’s movement plane is in coincident with the transport aircraft’s symmetry plane XOY. The cargo and transport aircraft do not have any elastic deformation during the airdrop. The cargo will stay in the center of gravity of transport aircraft in the initial time.
Integral method
The integral method for modeling is to take the cargo aircraft system as a whole, and the role between cargo and transport aircraft is seen as internal forces. As cargo moves in the hold, the position of the whole system’s center of gravity should be calculated continuously since the effect of cargo moving is dramatic especially as the cargo mass is large. When the cargo and transport aircraft are taken as a whole, the traction force executed by parachute has been added into the force equation. Similarly, the moment equation has additional moment due to the force of parachute. The center of gravity of whole cargo aircraft system will move back as the cargo moving back in the hold and then return to original position quickly as cargo drops away from transport aircraft. The detailed modeling process is shown in the work by Gan. 14
The modeling diagram of integral method is depicted in Figure 7. The general steps are as follows:

Integral method.
Calculate the whole center of gravity position and its moving speed based on the cargo’s movement in the hold.
Calculate the whole time-varying moment of inertia and aerodynamic moment around center of gravity according to position variation of the whole center of gravity.
Substitute the center of gravity position, moment of inertia, and aerodynamic moment in the first two steps into conventional aircraft model, then take the parachute’s pull force as additional force, and also add it into conventional model to get airdrop model, in which the mass is the whole system’s mass.
Calculate the actual speed by the additional speed conversion since the model’s speed obtained from the first three steps is speed of the whole center of gravity, rather than the actual speed of aircraft body.
Separation method
The separation method takes the no-load transport aircraft and cargo as independent aerodynamic research object separately, and corresponding models are built based on the consideration of interaction force between these two objects. That means, the force and moment effect of cargo’s moving in the hold are considered in the no-load transport aircraft’s aerodynamic model, and similarly, the force and moment effect of transport aircraft is considered in the cargo’s aerodynamic model. The detailed modeling process is shown in the work by Zhang et al. 13
Figure 8 shows the modeling diagram of separation method, the general steps are as follows:

Separation method.
Analyze the forces for the cargo within aircraft firstly and calculate the force from cargo to aircraft based on the interaction force principle.
Calculate the additional moment produced from cargo’s movement to aircraft due to the whole system’s center of gravity.
Calculate an additional force and moment from cargo’s movement to transport aircraft.
After cargo is dropped out, the dynamics is the same as conventional aircraft.
Control problems of ultra low altitude airdrop
Ultra low altitude airdrop process is near to ground and cargo airdrop process makes the dramatic variation of center of gravity and rotation inertia, which will change the aerodynamic moment parameter. Especially at the moment of dropout, mass, center of gravity, and rotation inertia of aircraft will be mutated, which will make flight unstable or cause failure of the transport aircraft’s airdrop missions.
Different from high altitude airdrop, the ultra low altitude airdrop doesn’t need to consider the landing point’s accuracy, but the transport’ flight safety with airdrop process should be seriously ensured. In fact, uncertainty and nonlinearity are always existing in flight dynamics especially in case of unknown environment, with this topic, many works have been done on problems of dynamics decomposition, 17 uncertainty learning, 18 and saturation compensation. 19
In the study by Liu et al.,
20
the linearized model from the dynamics is used to construct
Although several attempts are tried to control the dynamics, the unique problems encountered by transport aircraft’s flight control are discussed as follows: 1. Altitude control under constraints
Since the ultra low altitude airdrop process is near to the ground, the wing is possible to contact the ground and it might be fatal for the mission. Two kinds of constrains should be carefully considered. One is the input nonlinearity and the other is the output constraint. In case of input nonlinearity, the expected control signal cannot be exactly executed on the system and this might make the system performance worse or even unstable. So in the controller design, more consideration should be on the input constraint. See Figure 9 from 24 where the saturation is in effect. Currently, the controller is proposed in the way that the design is verified by simulation to see if the response of altitude is satisfied. This is vital problem in reality since such controller cannot guarantee the system output with prescribed performance boundedness. In future work, the transient performance should be considered in controller design, and in theory, the performance should be made to make sure that the altitude is maintained in certain region, thus the flight can be safe.

Elevator deflection of continuous airdrop. 24
2. System dynamics switching control
Before and after airdrop, the dynamics are with sudden change. Controller considering only one model cannot cover the situation and one concern is to design controller for both dynamics, while both controllers can make sure of system stability during the airdrop while the other concern is to design one controller, which can adapt to system change. Also, it should consider the case that the airdrop time is not known exactly so that unknown time delay should be considered in the controller design. From Figure 10, due to the dynamics sudden change, the system goes unstable if efficient controller cannot be designed. Thus, the case of continuous airdrop 24 should be carefully considered since the dynamics is switching from time to time.

Altitude response of continuous airdrop. 24
3. System uncertainty, ground effect, and crosswind
System dynamics is dramatically changed when cargo separating the aircraft and there is deviation of the dynamics when cargo moving inside. In reality, the terrain is not known as priori and there exists unknown wind. The controller should have the capability to learn system dynamics and adapt to the time-varying uncertainty caused by terrain and wind. Thus, the system should be equipped with strong learning scheme to achieve fast adaption. For example, the Kriging estimation 25 or neural learning 26,27 can be used to enhance system learning, while the disturbance observer can be constructed to estimate the change and used as compensator to improve the system performance. For more information about the disturbance observer design, the review can be found in the study by Chen et al., 28 whereas in the studies by Yang et al., 29 Xu et al., 30 Yang et al., 31 and Chen et al., 32 the technical design is proposed for many different systems with different concern.
Conclusion
The development of airdrop with high altitude and ultra low altitude is briefly introduced. The features of airdrop process are presented, while the main challenge is explained. For high altitude airdrop, three kinds of precision airdrop system are discussed. For the controller design of ultra low altitude airdrop, two kinds of modeling approaches are illustrated, while several significant problems during this process are analyzed in detail as future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61304098 and 61622308), Aeronautical Science Foundation of China (2015ZA53003), Natural Science Basic Research Plan in Shaanxi Province (2014JQ8326, 2015JM6272, 2015JQ6255, and 2016KJXX-86), Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417), National Key Basic Research Program of China (2014CB744900), and Fundamental Research Funds for the Central Universities (3102014JCQ01010, 3102015AX001, 3102015BJ(II)CG017).