
Abstract
This article investigates the cargo’s blocking failure analysis, simulation, and safety control of transport aircraft with continuous heavy airdrop. As the cargos move backward and drop out, the continuous variation of center of gravity for the whole system will deteriorate flight quality dramatically. Furthermore, due to various mechanical reasons, if the cargo is blocked on the delivery channel and the airdrop process is suspended suddenly at this time, the flight safety may be threatened. In view of this, the blocking failure is analyzed based on the aircraft model in this article and then the simulation is completed to show the failure’s impact on aircraft’s flight quality. Next, based on the uncertainty analysis and introduction of interval robust control theory, the safety controller is designed to stable the closed-loop system. The final simulation shows the proposed safety control strategy’s effectiveness.
Introduction
Both for the civil relief supplies and military weapons delivery, the rapid, heavy and accurate are the development trends of air transportation. As a necessary skill for transport aircraft, airdrop technology has attracted more and more attention from lots of country; 1–2 airdrop ability is an important indicator of national defense force and significant means of rapid response and long-distance maneuvers in modern war.
Airdrop attracts lots of scholars’ attention and increases steadily. 3 –19 Ward 3 and his colleagues complete the system control for autonomous airdrop system through in-flight system identification, which can estimate the system dynamics better than a precomputed model, and then they extend their works on the glide slope control strategy 4 for autonomous airdrop systems. Bury et al. 5 focus his work on the experimental characterization of the vortices structure in the aft fuselage region and in the wake of a simplified geometry of a military transport aircraft. Xu and Chen 6 present the review of modeling and control during the airdrop process of transport aircraft, dividing it as high-altitude and low-altitude airdrop. In a study by Chen and Shi, 7 the modeling problem of transport aircraft with cargo moving inside is studied and then the effects of moving process parameters are analyzed. Based on these simplified airdrop flight equations, the advanced control methods are developed to tackle the flight attitude holding and disturbance/uncertainty attenuation problem in the studies by Chen and Shi 8 and Chen et al. 9 Cuthbert 10 and Cuthbert and Desabrais 11 develop the simulation software called Decelerator System Simulation to predict the dynamics and trajectory of the parachute system. Wright et al. 12 develop the Precision Airdrop System to support ground and in-flight high-altitude airdrop mission planning for ballistic and autonomously guided system payloads. Zhang et al. 13 present the mathematical model of the airdrop system with two different methods and then the comparison analysis and effectiveness simulation verification are explored. Considering the transport aircraft’s ultralow altitude airdrop mission, Ouyang and his colleague 14 study the modeling problem of Y-8 aircraft with ultralow altitude airdrop, Liu et al. 15 build the system model for ultralow altitude airdrop and then complete the controller design. Regarding the ultra low altitude airdrop problem on unconventional condition, Chen et al. 16 adopted the computational fluid dynamics approach to analyze the ground effect on airplane’s aerodynamic parameters with forward or asymmetrical lateral obstacles and obtained some useful results. For the heavy airdrop problem, Liu et al. 17 build the dynamics equation of transport aircraft for heavyweight airdrop and then linearize it to construct L1 adaptive control. In German Aerospace Center (DLR), Institute of Flight Systems, Thomas 18 presents a cargo airdrop simulation for evaluation and assessment of airdrop mission in future military transport aircraft applications.
Continuous airdrop refers to the airdrop of more than one goods in a short time. Compared with the single airdrop, this scenario is more common in engineering practice and it will change the flight quality dramatically. If the controller is not designed or implemented properly, security accidents will happen to the aircraft. 19 During the continuous airdrop process, the cargos fixed on the floor will move backward along the delivery channel and drop out in turn. As the transport aircraft frequently performs heavy cargo airdrop or even continuous airdrop, the airdrop mechanical system is prone to be blocked or other failure. The blocking failure will not only result in the suspension of the airdrop mission but also introduce trouble to flight safety. 20 In view of this, the variable structure control theory is adopted to control such process based on the input–output feedback linearization form. 20,21 Xu 22 investigates the dynamic surface control of nonlinear transport aircraft model during the continuous heavy cargo airdrop.
The main contributions of this article are as follows: (1) Different from the airdrop modeling and various controller designs by most scholars, this article focuses on the blocking failure analysis of continuous airdrop and extends the previous results in a study by Chen and Shi 7 to the failure process modeling. (2) With this analysis, the typical continuous airdrop process cases are defined and simulated to show the blocking failure’s impact on aircraft’s flight quality. (3) To guarantee flight stability and complete continuous airdrop mission, the safety controller is designed based on the interval control theory and then the simulation test is completed to validate the controller design in the end.
This article is organized as follows. In the “Cargo blocking failure analysis and problem formulation” section, the simplified model of airdrop is described firstly and then the continuous airdrop and its blocking failure mode are analyzed based on this model. To show the continuous airdrop and its blocking failure’s impact on flight quality, the simulation test is completed in the “Cargo blocking failure simulation test” section. In the “Safety controller design for cargo blocking failure” section, based on the failure mechanism analysis, the safety controller design is presented to guarantee flight stability and then the simulation results are illustrated. The final conclusion is included in the “Conclusion” section.
Cargo blocking failure analysis and problem formulation
Simplified flight equations of transport aircraft with cargo airdrop
Based on Newton’s second law and the Euler angle relation of rigid body, the nonlinear aircraft motion equations with the heavy cargo airdrop were derived 7,26,27,28 as
1. Force equation

2. Moment equation

The values and units of the aircraft coefficients in this article are listed in a study by Xu. 22
Through the analysis of force and motion, we can get the following conclusions: Airdrop has great impacts on inertia force, aerodynamic moment, and inertial moment; meanwhile, the aerodynamic moment of cargo moving (i.e. n 1 sB × F) makes a critical effect on aircraft attitude variation, and the other items can be neglected in force equations and moment equations in the range of tolerance deviation.
Expand the aero dynamical moment as

Then the moment equations can be rewritten as

In this article, the airdrop’s impact on longitudinal axis equations is further considered, that is, the whole system can be rewritten as

where the flight states are xT = [V, α, θ, q] and the controller inputs are
Continuous heavy airdrop formulation
Generally speaking, before airdrop, the cargos will be placed and fixed in the fuselage in turn. As the transport aircraft delivers them to the predestined location and altitude, the cargos will be released from aircraft one by one, that is, the cargo near the door will begin to move backward and drop out firstly, and then the second cargo will start to move backward, and so on. With this airdrop process, the center of gravity (CG) of aircraft will move backward and switch back suddenly as the cargo moves back and drops out, and it will be repeated again as the next cargo airdrops. As the cargo’s weight, quantity, and airdrop time increase, the flight quality will be gradually decreased.
In this article, we set two continuous airdrop scenarios, namely two cargos continuous airdrop and four cargos continuous airdrop, which are described in Tables 1 to 4 and Figures 1 and 2 as follows. Two 20 tons cargos airdrop Four 10 tons cargos airdrop
The cargos’ airdrop process is defined as follows: Each cargo’s moving acceleration is optional, which is 0.5 m/s2, 1 m/s2, and 2.5 m/s2. The (k + 1)th cargo will start moving as the kth cargo drops out 1 s later. The airdrop process will be ended as the last cargo drops out.
Flight condition for two 20 tons cargos airdrop.

Two 20 tons cargos layout scheme.

CG: center of gravity.
Flight condition for four 10 tons cargos airdrop.

Four 10 tons cargos layout scheme.
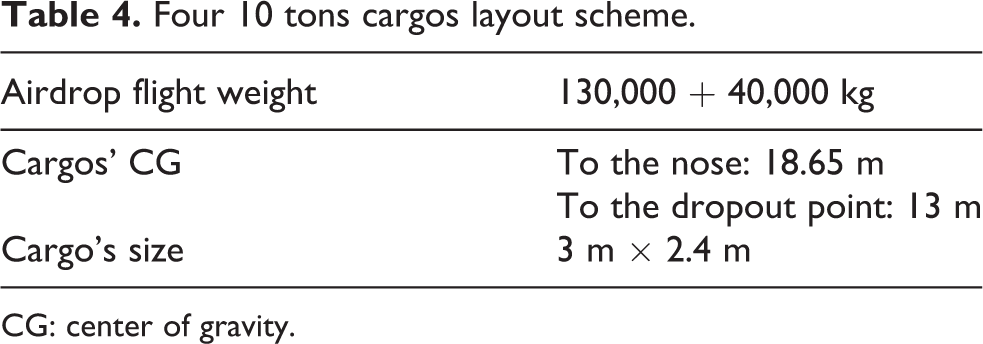
CG: center of gravity.

Two cargos airdrop layout.

Four cargos airdrop layout.
Cargo blocking failure analysis
During the airdrop process, due to the cargo’s heavyweight, the high strength usage of airdrop system, and the sundries intrusion, the blocking failure is easy to be occurred on delivery channel, and furthermore, the blocking location is unknown in advance.
Cargo blocking failure will lead to the suspension of airdrop, and the closer the blocking location is from the door, the greater the impact is on the flight condition. Especially, if the cargo is blocked near the door, the whole system will be susceptible to disturbance or even be unstable, and the predesigned control law may not guarantee flight safety.
With the occurrence of the blocking failure, the cargo’s moving velocity and acceleration in the system are zero, and the location remains constant. From the viewpoint of modeling, the whole system’s CG stays near the safety area boundary for a long time. If the system is affected by the external disturbances (e.g. crosswind) or the controller is not working properly, then the aircraft will become uncontrollable, which is a serious threat to flight safety.
Cargo blocking failure simulation test
Based on the airdrop model, flight condition settings, and continuous heavy airdrop formulation described in the section above, the simulation platform is built in this section. And the cargo’s moving acceleration is set to 1 m/s2 as an example.
For the cargo blocking failure simulation test, the simulation conditions are set as: airdrop mode: the two modes described above, for example, two 20 tons cargos airdrop and four 10 tons cargos airdrop; control mode: the airdrop process with controller in a study by Chen et al.
8
will be implemented; blocking failure: During the continuous airdrop, the last cargo is assumed to be blocked near the door.
With these conditions, the flight simulation tests with cargo blocking failure and normal airdrop are completed and compared to show the failure’s impact on aircraft’s flight state as follows. Two 20 tons cargos airdrop Four 10 tons cargos airdrop
From Figures 3 and 4, it’s interesting to see that, as the second cargo or forth cargo is blocked near the door, the whole system becomes more fragile, especially the short-period motion parameter. As the cargo’s weight is heavy in the two cargos continuous airdrop mode, which is shown in Figure 4, the angle of attack and pitch angle rate oscillation amplitude are bigger. It’s no doubt that such a large oscillation angle cannot be accepted in an actual airdrop mission.

Closed-loop systems’ flight state curves comparison 1.
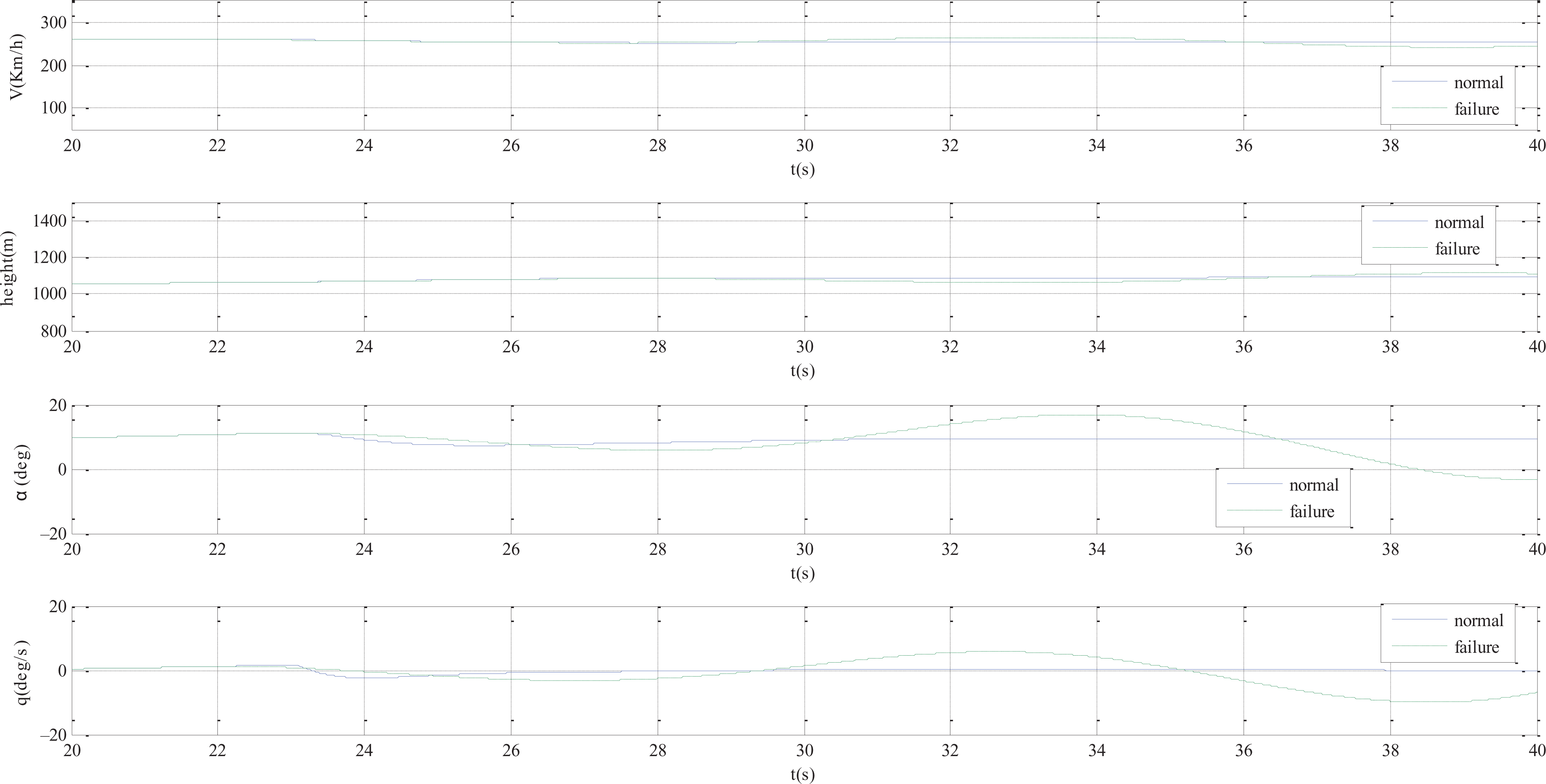
Closed-loop systems’ flight state curves comparison 2.
Safety controller design for cargo blocking failure
The tasks for blocking failure problem can be divided into two items, that is, failure detection and stable control after the occurrence of failure. In engineering practice, the moving cargo’s blocking failure time can be detected by the airdrop system, but the blocking failure location cannot be known in advance or be known precisely. Such unknown location makes it difficult to determine the controlled model.
So in this section, the cargo blocking failure time is assumed to be detected, and the controlled model determination and controller design are analyzed in detail. Considering the model uncertainty’s interval properties, the interval system robust control theory is introduced firstly as follows.
Interval system
To design the safety controller, the general controlled system is considered as

where
The matrices

where
Modeling of cargo blocking failure
During the airdrop process, the CG of the whole system will move as the cargo’s moving in the fuselage. With the cargo blocking failure, the final aircraft’s CG location is unknown or uncertain. From a theoretical point of view, the uncertainty of the CG location will lead to the uncertainty of the system controlled model, and we can assume that the uncertain upper and lower bounds are the initial system model and the model which the last cargo has blocked near the doorway. And these two models can form the model boundary of transport aircraft with cargo blocking failure, for example, the system state equation’s matrix interval.
With nonlinear flight equations in the “Cargo blocking failure analysis and Problem formulation” section and the continuous airdrop scenarios description above, we can get their system intervals as follows. Failure system interval for two 20 tons cargos airdrop: For the initial system model, the cargos’ moving acceleration and velocity are all set to be zero, which means the cargos’ state is kept in the initial layout as shown in Figure 1; and for another system model, the ultimate cargos’ weight is set to 20 tons and the cargo location is set to the tail of fuselage. Failure system interval for four 10 tons cargos airdrop: For the initial system model, it’s the same with the (1) above; for another system model, the ultimate cargos’ weight is set to 10 tons and the cargo location is set to the tail of fuselage.
With these two airdrop scenarios, four nonlinear equations and the trimming and linearization methods can be used to get the linear system state matrixes. Take the two 20 tons cargos airdrop as an example, its corresponding matrixes in equation (7) are



The four 10 tons cargos airdrop’s matrixes are the same with the above method, so it’s omitted because of the limited space.
Controller design
The emergency controller’s mission is to guarantee flight stability in short time passively without knowing the cargo blocking failure location. Based on the classical interval system robust control theory, the below theorem can be obtained:
Theorem 1 : The system (6) with state feedback controller is stable if there exist positive define matrix X and real constant ε > 0 that satisfy the following Riccati equation
23

where


In which, the definition of
With the system description in (6), the real constant ε in theorem 1 is set to 0.3 for the closed-loop system eigenvalue optimization and we can get the interval system robust controller as

Closed-loop system simulation
For the effectiveness validation of controller design, several cargo blocking failure cases (e.g. different blocking failure locations: case 1, case 2, case 3; from cases 1 to 3, the blocking position is farther to the rear door) are simulated and analyzed comparatively with three different controllers (e.g. normal airdrop with general controller in a study by Chen and Shi, 8 cargo blocking failure airdrop with general controller, and the third one, the failure airdrop with safety controller), the results are shown in Figures 5 to 7.
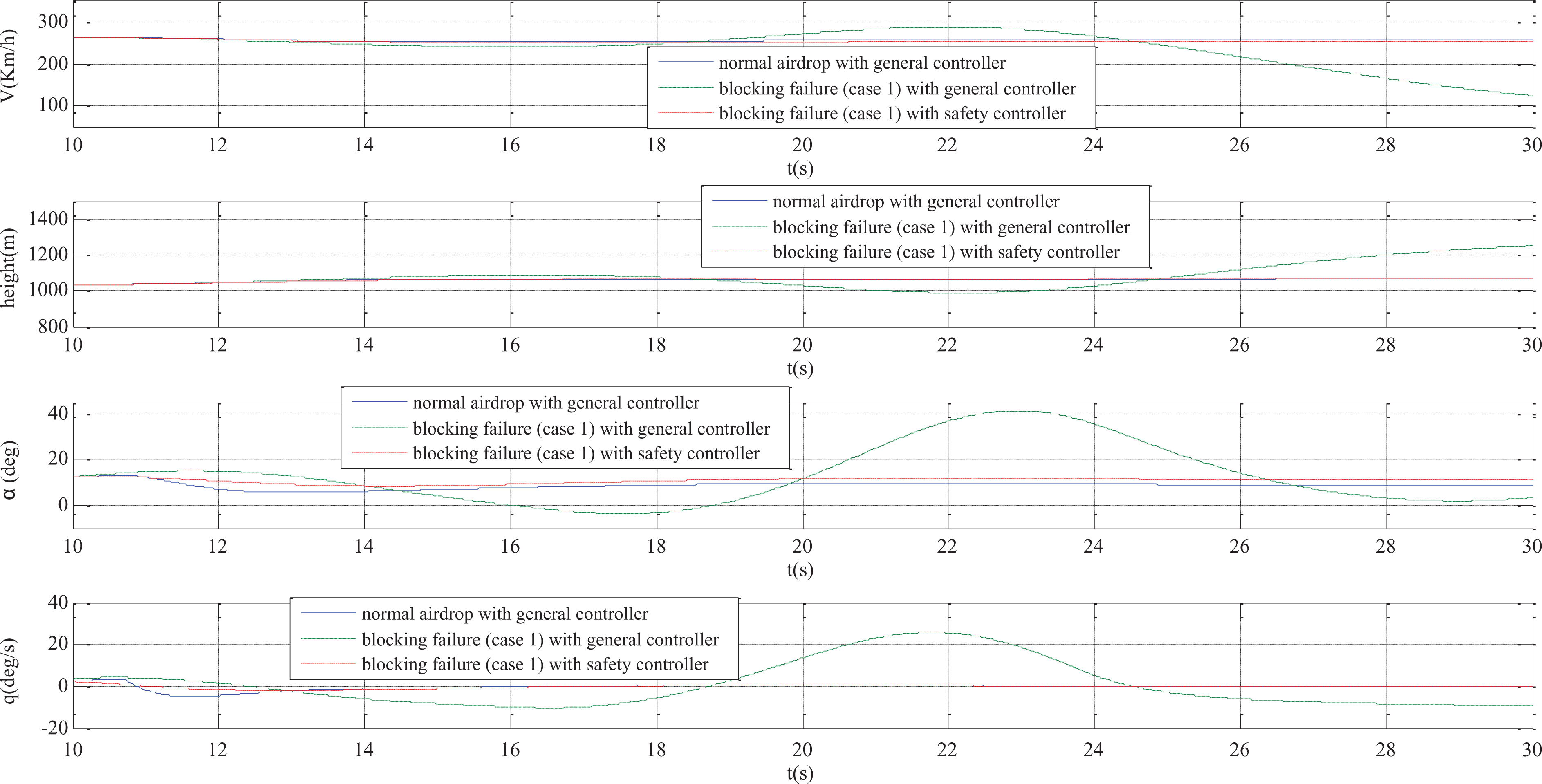
Closed-loop systems’ flight state curves comparison for case 1.

Closed-loop systems’ flight state curves comparison for case 2.

Closed-loop systems’ flight state curves comparison for case 3.
Compared with the blocking failure with general controller in Figures 5 to 7, after 11 s, the angle of attack and pitch angle rate curves of closed system with safety controller still have slight oscillation, but the amplitudes have obviously been reduced in different blocking failure cases. Moreover, the whole system tends to be stable or smooth rather than divergent, which means that the controller can effectively guarantee the system’s stability and can smooth the system response with different failure cases. The results show that the safety controller can stable the system with cargo blocking failure, even if the blocking failure location is unknown in advance.
Conclusion
In this article, to analyze the cargo blocking problem, the simplified flight model and continuous heavy airdrop formulation were described, and then the flight process simulation and safety controller design with cargo blocking failure were implemented. The system model with uncertain failure location was assumed to be interval model, and then the robust controller design method was adopted to stable the closed system. Simulation results were presented to show the effectiveness of the proposed controller.
For future work, because the failure has happened suddenly, the failure self-detection which is integrated into the controller design framework by employing the disturbance observer, 24 immunity-based schemes 25 should be considered. Furthermore, the failure detection and the corresponding safety control problem in case of low-altitude airdrop should be considered since the aircraft’s attitude variation in low altitude is intolerable. 16
Footnotes
Acknowledgements
The authors would like to thank the editors and the anonymous reviewers for their critical and constructive comments that helped to improve the quality and presentation of this article. They would also like to thank B Xu and CT Wu for valuable discussions on the dynamical modeling.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Basic Research Program of China (grant no 2014CB744900), the Fundamental Research Funds for the Central Universities (grant no 3102018ZY003), and Aeronautical Science Foundation of China (grant no 20165553035) and Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417).