
Abstract
A study of the L1 adaptive controller is conducted based on the backstepping method for the model of large transport aircraft with drastic changes appearing in heavy load airdrop process. The system is divided into an attitude subsystem and a velocity subsystem. For the attitude subsystem, the backstepping control is used to design the virtual control of path angle and the pitch angle in external loop with the L1 adaptive controller designed in internal loop to estimate the uncertainties and disturbances in the subsystem and to compensate them. In the stability analysis, the uniform boundedness of all signals in the closed-loop system is proven. Simulation results show that the proposed control method preserves the quick dynamic torque response, high efficiency, and robustness in heavy load airdrop; to some extent it can alleviate the control switch lead or lag problem and ensure the safety of the transport aircraft to fulfill the complete airdrop mission.
Introduction
Large air transport and precision airdrop plays an important role in military and rescue operation, with the airdrop ability being an important indicator of national defense force and the significant means for rapid response and long distance maneuvers in a modern war.
However, the robust and precise airdrop is difficult to carry out due to model mutation occurring especially during the large transport heavy drop. The aircraft controller cannot be switched accurately during airdrop, that is to say, the switch can occur either ahead or lagged, causing intense oscillation or machine apart. This problem belongs to the mutation model control, 1 –3 and it is necessary to solve it properly for the safety of large transport aircrafts.
Currently, the study of transport load airdrop focuses on the analysis, 4,5 modeling, 6 simulation, 7,8 and control law design. 6,9 In the study by Jann, 8 the general military airdrop process of longitudinal channel is simulated, with the influence of airdrop on the flight control system studied by Chen et al. 6,9 At the moment of cargo separating from aircraft, the large angle of attack motion and the problem from controlling models of security are shown in the literatures. 10 –13 The variable structure control in Xu and Sun 14 and sliding mode control in Zhang and Shi 15 are also studied to ensure the safety of the aircraft.
With the development of the modern control theory, many methods 16 –21 are useful in improving the robustness of the system. In earlier works, 17,20 the discrete adaptive backstepping is studied for a class of uncertain systems and they are also applied in helicopter control by Li et al. 22 To deal with the calculation explosion, the dynamic surface control and instruction filter are introduced in the study by Xu. 23 The backstepping combined with sliding control is introduced in the longitudinal sliding mode adaptive controller for the unmatched and uncertain longitudinal parameters. The L1 adaptive control theory is presented by Cao and Hovakimyan 24,25 and widely used later. Compared to the conventional adaptive control, L1 adaptive control can make the regulation time shorter and ensure better asymptotic tracking and transient performance in the delay system. 26 –29
For the instability of control system by model mutation during the ultra low altitude airdrop, this article presents a method combined with backstepping and the L1 adaptive method for obtaining the robust and precision airdrop. The backstepping method is used for the controller of track angle and pitching angle in the attitude subsystem. The L1 adaptive controller is carried on the estimation and compensation to improve the dynamic performance and robustness. Through the design of virtual control, compensation is made to solve the problem of calculation explosion, ensuring the stability and reliability. Simulation results show the effectiveness and strong robustness of the method proposed in this article.
The article structure is as follows. The airdrop model is presented in the dynamic model section, the design of controller is given in the third section, an analysis of stability is made in the fourth section, in fifth section, simulation results show the effectiveness of the control method, and the conclusion is drawn in the last section.
Dynamic model
In this article, the force in the airdrop process of the aircraft is analyzed and for the cargo movement displacement as additional state variables, the dynamic model from Christopher et al. 26 can be described as follows
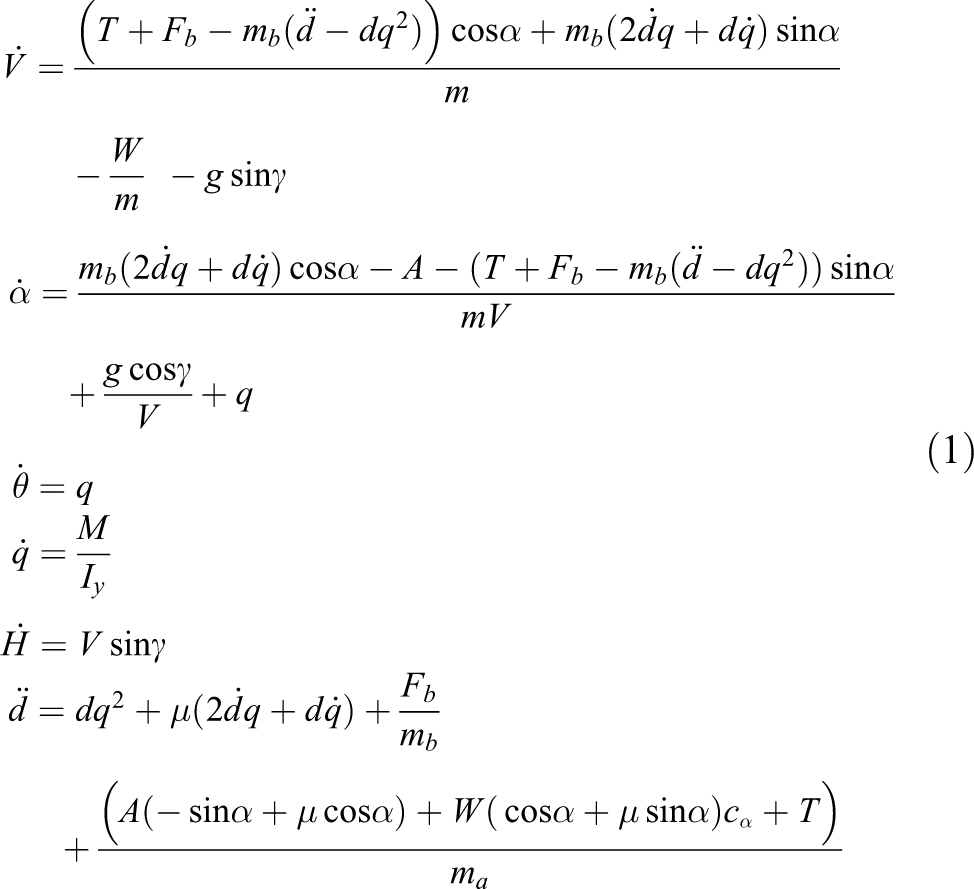
In equation (1),
V is the plane velocity; α is the attack angle;
θ is the pitch angle; H is the altitude;
q is the pitch rate; d is the distance of the first
cargo moved away; γ is the flight path angle and
γ = θ − α; Fb is the traction for cargos
movement and

In the dynamic model,

where n is the ratio of mb and m, Iy is the total inertia of plane and the rest load. The values and units are listed in Tables 1 to 5.
Miscellaneous coefficient values.

Lift coefficient values.

Drag coefficient values.

Moment coefficient values.

Thrust coefficient values.

Remark 1
When all the cargos are dropped, the system model from Christopher et al. 26 is

Controller design
As the track angle γ is little, it is assumed that

where the PID parameters kP, kI, and kD can be set by the designer.
When the track angle approaches the expected γd, a height index tracking error converges to zero. Through the instruction transformation, the height control can be achieved through the attitude control.
Define the state variables
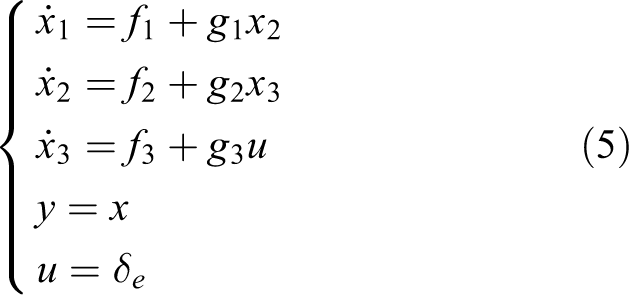
Velocity subsystem can be written in the following form

where
Attitude subsystem model
The attitude subsystem was composed of track angle parts, pitching angle parts, and pitching angle rate parts. It was divided into the external loop and internal loop subsystems.
The external loop subsystem is as follows

The internal loop subsystem is

By introducing the dynamic surface control to the external loop and L1 adaptive control to the internal loop, the controller diagram is shown in Figure 1.

Attitude subsystem control diagram.
According to the track angle instruction γd , the repeated
virtual control is used to achieve the control effect with instruction filter introduced
to solve the traditional problems of “calculation explosion.” The
Backstepping control
Step 1
According to the equation


where k1 is a positive design parameter.
There is the new signal

where
Define

Step 2
The definition of
Define

where k2 is a positive design parameter. Equation (8) can be written as

L1 adaptive controller
The internal loop subsystem

where A = 0, B = g3,
c = 1, and
Assumption 1
Unknown parameters ρ and σ are uniformly bounded. For
known tight convex set Θ and Δ, there is
Assumption 2
Unknown parameters ρ and σ are continuous,
differentiable, and uniformly bounded. There is
L1 control law is composed of two parts

where

As the introduced state feedback control, the transfer function is as follows

In this article, the used state prediction model is

Define the state prediction error 
L1 adaptive update law is in the following


Estimate errors are 
where Γ > 0 and P > 0 is the solution of
Lyapunov equation
Then the adaptive controller can be designed as

where u2(s),
So, the L1 controller diagram is shown in Figure 2 .
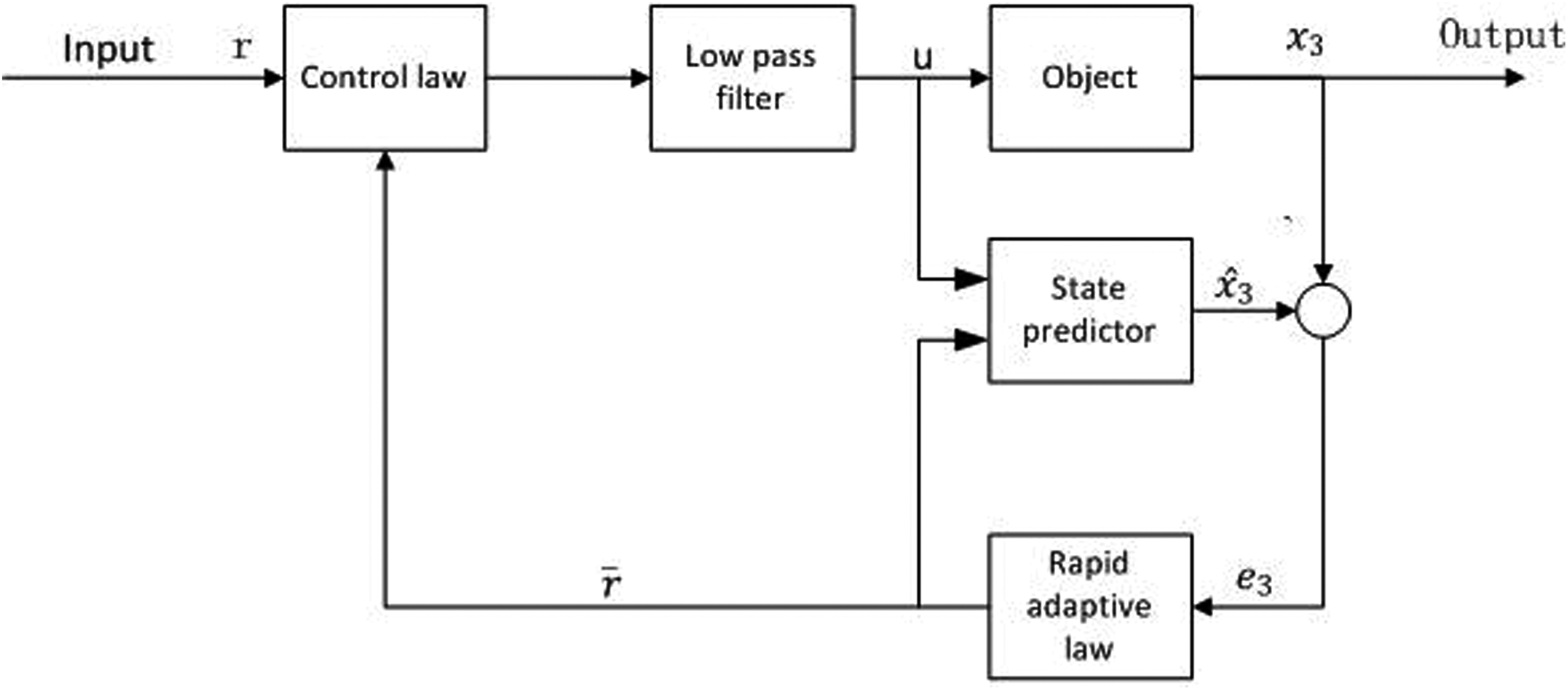
L1 adaptive controller diagram.
In all, the prediction model of loop system is in the following
It is necessary for the L1 adaptive controller to satisfy the following conditions

where
Velocity subsystem controller
According to

The expected controller is

where kV is the designed parameter and kV > 0.
So, equation (23) can be written as

Stability analysis
Proof 1
Select the Lyapunov function for the external loop subsystem in the following


Taking the derivative of



As

For


The dynamic errors e1 and e2 are all bounded, so the external loop subsystem is stable.
Select the Lyapunov function of the internal loop subsystem in the following

Taking the derivative of (34), there is
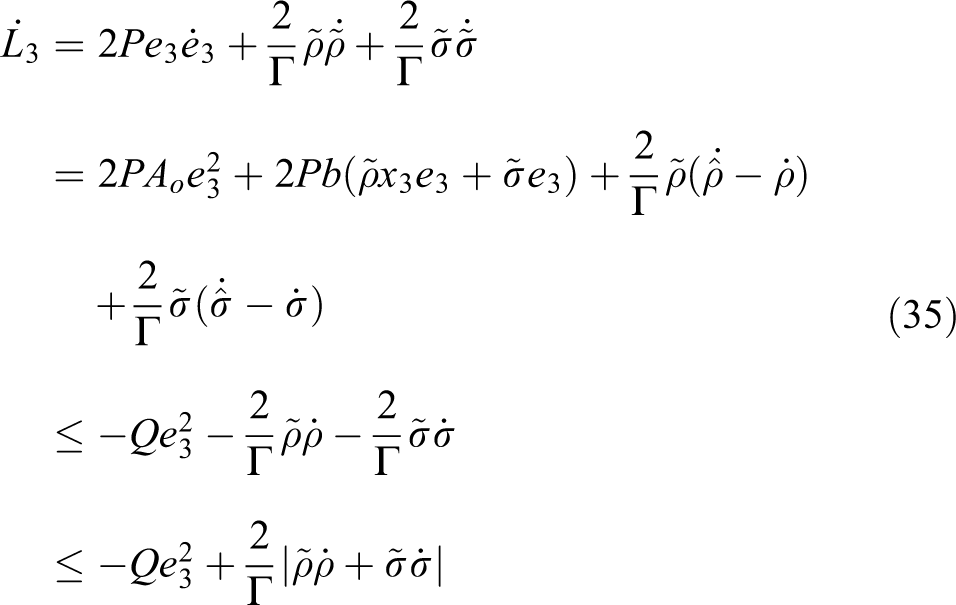

The projection operator guarantees that ρ ∈ Φ and σ ∈ Δ, and therefore the following formula is established

Suppose


then equation (40) is obtained

For P > 0, there is

From assumptions 1 and 2, the following equation can be obtained

Putting (41) and (42) into (35), there is

Suppose that

Thus

So the attitude subsystem is stable.
Proof 2
Select the following Lyapunov function

Similar to proof 1, there is

where the design parameter is

For the Lyapunov function is negative, the velocity subsystem is stable.
Simulation verification and analysis
Using Matlab to calculate the balance state of different heights and velocities, this article simulates the situation of airdrop as shown in Table 6.
Different trim conditions for airdrop.

The initial state before the airdrop is
The L1 adaptive backstepping controller for large transport
aircraft airdrop heavy load is designed for the instability of the aircraft caused by the
drop process. The controller parameters in the attitude subsystem are
k1 = 1.2 and k2 = 4 with the
static gains of K = −20, Γ = 1000, and
Q = 1, and the low-pass filter is
Figure 3 is the chart for comparing the plane altitude and the velocity response with no controller or the L1 adaptive backstepping controller. Figure 4 shows the dynamic response of flight angle, pitch angle, and pitch angle velocity in the two cases. From the comparison in Figures 3 and 4, we can see that the flight altitude, velocity, and attitude angles can be kept stable during the airdrop using this control method. If there is no proper control, the flight will change seriously, which will threaten the aircraft safety especially at the moment of cargos leaving the aircraft.
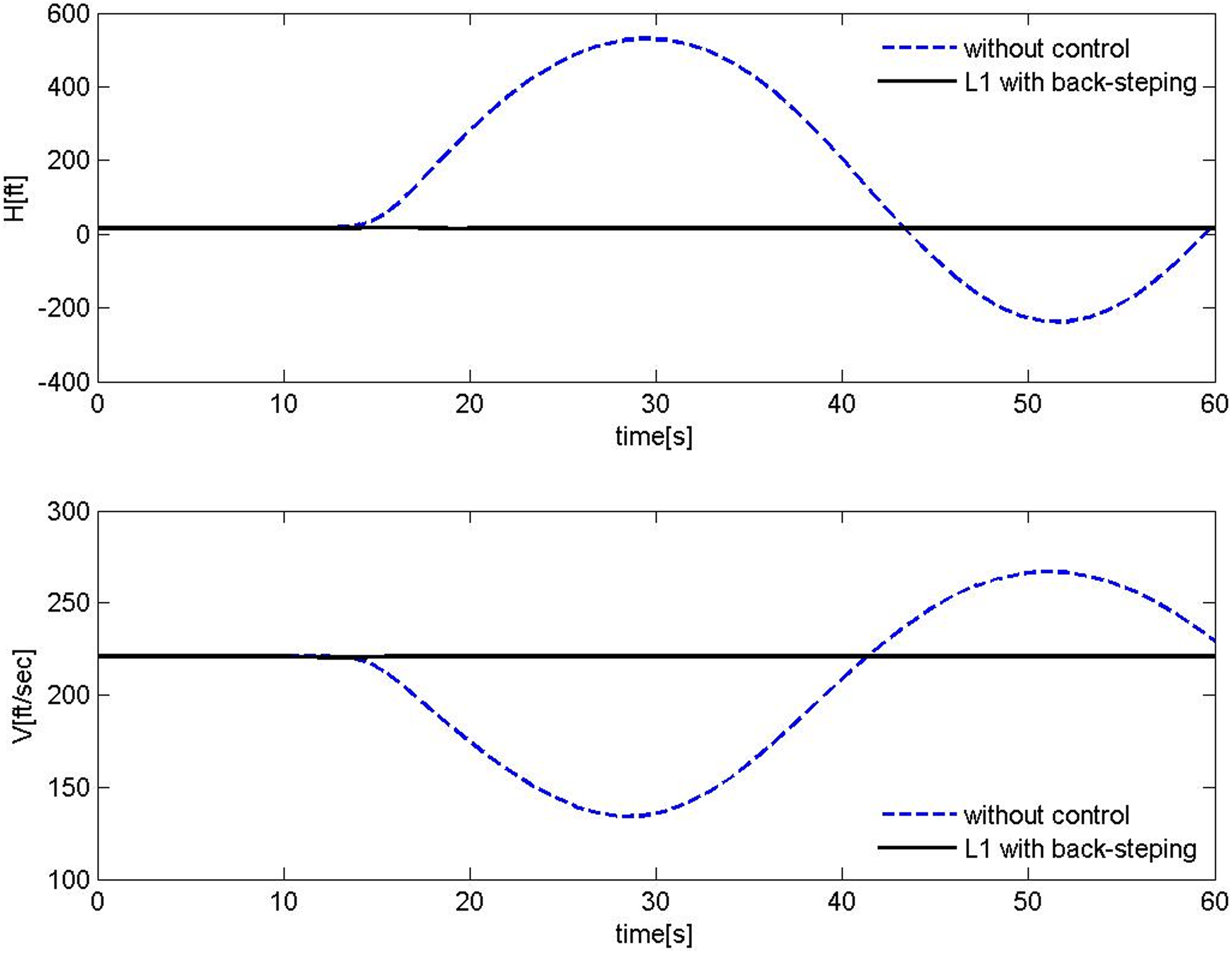
Altitude and velocity response.

Attitude angles response.
At the moment of airdrop, it is necessary to switch the control strategy for the model mutation and the switch moment is also very important for the flight’s robust performance.
Figures 5
to 9 show the control effect in the three cases:
accurate switch, time delay of 1 s and 1 s ahead of switch time. It can be seen that the
control strategy in this article obviously has the control performance with short
overshoot, short response time, and short adjustment time, showing the good stability and
dynamic performance. At last the rapidity of the control method is shown in Figure 10 in the certain control and
environmental cases. From the simulation results, we can see that the controller based on
the L1 adaptive backstepping can guarantee the flight
performance and high robustness. Attack angle dynamic response. Track angle dynamic response. Pitch angle dynamic response. Pitch rate dynamic response. Height dynamic response. Elevator response.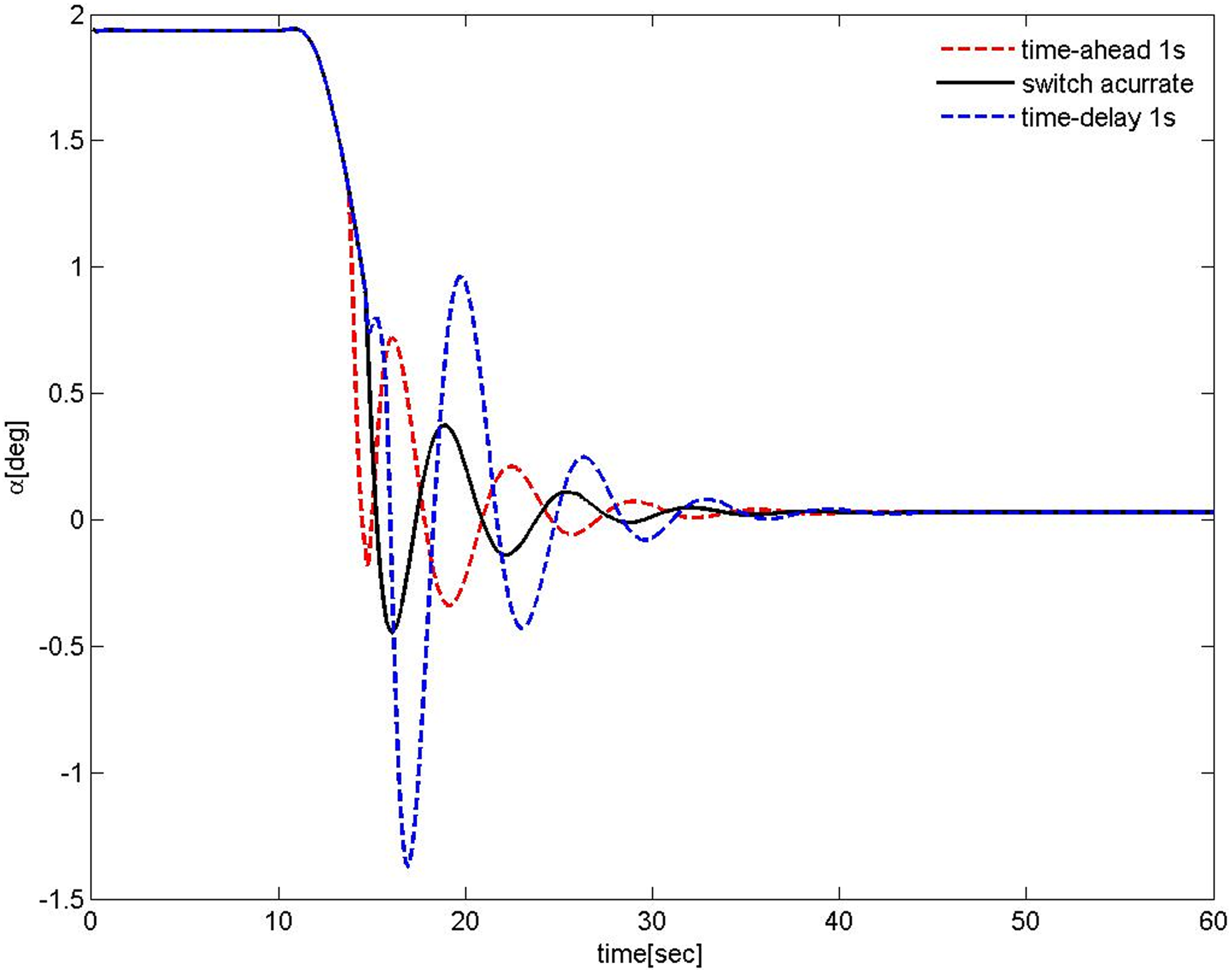





Conclusion
In this article, aimed at the airdrop, the backstepping is used for the velocity controller and the L1 adaptive control combined with backstepping is proposed for the attitude control law. In view of the uncertainty existing in the system, the L1 adaptive controller is used to estimate, compensate, and improve the control performance of the pure backstepping controller. By constructing the Lyapunov function, the system stability is proven. Simulation results show the effectiveness of the controller.
Footnotes
Acknowledgement
The authors would like to thank the anonymous reviewers for their helpful comments and valuable suggestions which improved this paper substantially.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study has been funded by the Shaanxi Industrial Science and Technology Key Project (grant no 2016GY-070) and Shaanxi Province Department of Education Key Project (grant no 2016JS017).