
Abstract
In this article, an adaptive sliding mode fault-tolerant control scheme is proposed to address the problem of robust and fast attitude tracking for a hypersonic vehicle in the presence of unknown external disturbances, additive fault and partial loss of effectiveness fault. Firstly, the healthy and faulty models of the vehicle are given. Then, a radial basis function neural network is designed to estimate the unknown additive fault, and the adaptive method is applied to deal with the unknown partial loss of effectiveness fault. Combined with the sliding mode control theory, the fault-tolerant controllers are designed for the outer and inner loops of the faulty system, respectively. The adaptive laws are designed to update parameter estimates to implement the inner-loop controller. Closed-loop stability is analysed and simulation results verify the effectiveness of the proposed fault-tolerant control scheme.
Introduction
Hypersonic vehicle, whose March number is over five, has important application values in military affair and civil area for their high speed, good break-defence capability and well-known attack performance, and the study of hypersonic vehicles has become a hot topic in the aerospace area. Recently, there have been significant research activities in hypersonic flight control. 1 –6 In the study by Xu and Shi, 1 the commonly used hypersonic flight model for controller design and the recent researches on hypersonic flight control were presented. Meanwhile, the potential challenges about hypersonic flight control were discussed for future research. A backstepping controller was designed by Xu and Zhang 3 for the longitudinal dynamics of a generic hypersonic flight vehicle with neural networks, and to avoid the causality contradiction, the hypersonic flight dynamics were transformed into a strict-feedback form from which the virtual control was designed in this article. In the study by Chen et al., 6 a robust attitude control scheme was developed for the near-space vehicle with external unknown disturbance and control input saturation.
Due to the complex flight conditions of hypersonic vehicles, they become sensitive to changes in atmospheric conditions and aerodynamic parameters, and the performance of the control system will inevitably be weaken. These significantly increase the possibility of the occurrence of faults, which can be affected by actuators, control surfaces and sensors. In order to improve the safety and reliability, the fault-tolerant control (FTC) for hypersonic vehicles must be considered.
In recent years, some effective FTC approaches have been proposed for longitude dynamics of hypersonic vehicles, such as backstepping control, 7 state tracking control 8 and output feedback control. 9 In the study by Qi et al., 7 an adaptive backstepping FTC scheme was proposed for a hypersonic vehicle with parameter uncertainties and actuator fault. The dynamic inversion control technique was introduced to handle the problem of velocity control, and the adaptive backstepping method was applied to guarantee the attitude tracking. In the work of He et al., 9 an adaptive output feedback FTC scheme was designed for a hypersonic vehicle in the presence of external disturbances, parameter uncertainties and actuator faults. The feedback linearization technique was applied to design the nominal controller. Based on the nominal controller, a fault-tolerant controller was proposed to compensate for the influence of actuator fault.
There have been some approaches proposed on controlling the attitude of hypersonic vehicles, such as sliding mode control (SMC), 10,11 adaptive control, 12,13 control allocation 14,15 and so on. In the study by Zhao et al., 11 an adaptive sliding mode FTC scheme was presented for near-space vehicle attitude control systems with actuator fault. The additive fault was considered, and the designed fault-tolerant controller ensured that the desired signals were tracked in the presence of faults. In the work of Jiang et al., 13 the problem of robust fault-tolerant tracking control for near-space vehicle was investigated. The vehicle attitude dynamics was transformed into Takagi–Sugeno fuzzy models. An adaptive fault-tolerant controller, which was based on the online estimation of actuator faults, was designed to reduce the effect of actuator fault. In the study by Alwi and Edwards, 15 in order to solve the problem of FTC for a flight vehicle subjected to control surface faults and failures, an online SMC allocation scheme based on the effectiveness level of the actuators was proposed. The control signals were assigned to the remaining healthy control surfaces. An active FTC strategy based on H∞ control theory was designed in the study by Cieslak et al. 16 for an aircraft suffering from degraded stabilizer control effectiveness. In a more recent work, 17 an integral-type sliding mode fault-tolerant controller, which was incorporated with adaptive technique, was designed to accommodate actuator faults of spacecraft with external disturbances.
Among these approaches, the adaptive SMC is recognized as an effective control technique to deal with model uncertainties, parameter fluctuations and external disturbances. It shows many merits, such as robustness to uncertainties and disturbances, 18,19 fast response ability, simple structure and easy implementation, and has been applied to a wide range of practical systems. 20 –22 Adaptive SMC has been addressed in some FTC studies for flight vehicle attitude tracking. 23,24 In the study by Xiao et al., 24 an adaptive sliding mode FTC approach was developed. The partial loss of effectiveness fault was effectively handled, and the attitude tracking was ensured.
The neural networks 25 or radial basis function neural networks (RBFNNs) 26,27 were used to estimate unknown nonlinear functions, and the approximation capability has been illustrated in the study by Sanner and Slotine. 28 In the study by Xu et al., 26 the unknown longitudinal dynamics of a hypersonic aircraft caused by fault was approximated by RBFNN. Combined with the dynamic surface control, the designed control scheme ensured good tracking performance in the presence of fault. Although attitude control has been achieved in some studies using RBFNN, few results in attitude dynamics of hypersonic vehicles are found, let alone integrate it into FTC.
Inspired by the above researches, an adaptive sliding mode FTC scheme based on the RBFNN technique is proposed in this article to deal with the attitude tracking problem for a hypersonic vehicle with unknown external disturbances, additive fault and partial loss of effectiveness fault. The main attraction of this study is that the unknown additive fault is handled using RBFNN, and the proposed FTC scheme, which is based on the estimation of the unknown additive fault, handles additive fault and partial loss of effectiveness fault simultaneously. Furthermore, the designed FTC scheme does not require any information about the effectiveness factors of partial loss of effectiveness fault.
This article is organized as follows. In ‘Problem formulation’ section, the healthy and faulty models of a hypersonic vehicle and the control objective are given. The unknown additive fault is estimated using RBFNN in ‘RBFNNs estimator’ section. The main researches are stated in ‘Adaptive sliding mode fault-tolerant controller design’ section; combined with RBFNN and adaptive control laws, the sliding mode fault-tolerant controllers are designed, which ensure the realization of the control objective. In ‘Simulation results’ section, simulation results are given to verify the effectiveness of the proposed approach, followed by some conclusions in the last section. The definitions on the norm of a vector and the norm of a matrix are given in Appendix 1.
Problem formulation
The considered hypersonic aircraft in this study is X-33. 29 The dynamic equations and attitude kinematics of the aircraft in its re-entry mode are given as follows


where

and the matrix R(⋅) in the kinematics equation (2) is defined as

When additive and partial loss of effectiveness faults appear simultaneously, the dynamic equation (1) can be rewritten as 30,31

where σ(t) = diag(σ11, σ22, σ33) and σii (i = 1, 2, 3) represent the effectiveness factors satisfying
Assumption 1
The disturbance torque d in equation (5) is bounded, that is,
Assumption 2
The additive fault
Assumption 3
The lower bound μ0 of σii (i = 1, 2, 3) in equation (5) is an unknown positive constant. 30
The control objective is to determine the control torque T in equation (5) such that all closed-loop signals are bounded and the desired attitude angle vector
RBFNNs estimator
It has been proved that given any arbitrary ε > 0, a three-layer RBFNN with single hidden layer containing a sufficiently large number of neurons can approach to a continuous nonlinear function f(x) with the approaching error ε. Hence, the nonlinear function f(x) can be represented as 28

where x ∈ Rp is the input vector,
In general, ϕi(x) is defined as the following Gaussian function

where
Therefore, a continuous nonlinear function vector

where
As a consequence, the unknown additive fault

where

where

where
Adaptive sliding mode fault-tolerant controller design
In this section, the two-loop sliding mode FTC scheme, which consists of an outer attitude angle loop and an inner angular rate loop, is designed to achieve attitude tracking. The design of the controllers consists of two steps. Firstly, the outer-loop sliding mode controller is designed to realize attitude tracking by taking the angular rate vector ω as the virtual control input. Then, the inner-loop sliding mode controller is designed so that the command angular rate vector ωc is tracked. Based on this design, the tracking of the desired attitude angle vector γd is achieved.
Outer-loop sliding mode controller design
For the attitude kinematics (2), let the attitude angle tracking error vector be

where
It is clear that on the sliding mode surface s1 = 0, the motion is governed by

which ensures the asymptotic convergence of the tracking error. The dynamic evolution of s1 satisfies

Choose the Lyapunov function as

The derivative of V1 is

To ensure the asymptotic stability of the origin of the system (13), the virtual controller ωc for the outer loop is chosen as

where ρ1 > 0 is a design parameter and sign(s1) is a vector-valued sign function defined as
Substituting equation (17) into (16) yields

Clearly, the desired sliding mode surface is guaranteed, and s1 = 0 will be reached in a finite time. The asymptotic tracking of γd by γ is guaranteed.
However, the command angular rate vector ωc is discontinuous, it will chatter on the sliding surface and cannot be accurately tracked in the inner loop. Therefore, the discontinuous function sign(s1) in equation (17) is changed to the saturation function

where η1 is a small positive constant. As a consequence, the continuous command angular rate vector is shown as

Inner-loop sliding mode controller design
In the study by Xiao et al., 24 the adaptive method is adopted to deal with the unknown partial loss of effectiveness fault of spacecraft. However, only this kind of fault is considered, the fault-tolerant capability is limited. On the basis of this study, two kinds of faults occurring simultaneously are considered in the following design of controller. The following task is to design an inner-loop sliding mode controller T to enable that the command angular rate vector ωc is tracked by the angular rate vector ω asymptotically.
Define the angular rate tracking error

where

whose derivative is

To facilitate the design of controller, equation (5) can be rewritten as

where

Substituting equation (25) into equation (24) yields

Recall assumption 2, according to the description of RBFNN in ‘RBFNNs estimator’ section, the additive fault f(⋅) in equation (25) is replaced by

Note assumption 1, the external disturbance d in equation (25) and ε in equation (28) satisfy the following condition

where
The required torque command T is designed as

where Tn is the normal controller, Tf is the fault-tolerant controller compensating for the influences of external disturbances and faults and the two terms are developed as


where k1 is defined as

and the adaptive laws are designed as



where
Choose the following positive definite Lyapunov function

where
The time derivative of V2 is

Let

Therefore, V2 is bounded and it is easy to find that
Similarly, the discontinuous sign function sign(s2) in equation (32) is replaced by the saturation function

where

And the adaptive law (36) is replaced by

It is of interest to determine how the inner-loop stabilization properties are altered when the fault-tolerant controller (40) and the adaptive law (42) are applied to the control system. The impact of this substitution on inner-loop stability will be addressed. To make the analysis precise, the parameter projection method 34,35 is firstly applied to guarantee the boundedness of estimated parameters and avoid parameter drift.
Suppose
where
and the projection
where
By applying the projection operator method, the parameter adaptive laws about

It has been verified in the study by Khalil
35
that
Then, in order to analyse the stability, choose the same Lyapunov function as equation (37)

Based on the characteristics of sliding mode surface s2, two cases are considered.
Case 1:
Let

According to equation (49), it is clear that when
Remark 1
Actually, according to practical experience,
Case 2:
Similarly to case 1, by replacing equations (32) and (36) with equations (40) and (42), the derivative of V3 is

When
Remark 2
Similarly, according to equation (50) and actual application, it can also be derived that the value of ∥ s2 ∥, which is smaller than
Through the above stability analysis of cases 1 and 2, it can be summarized that when the parameters related to the designed fault-tolerant controller are selected reasonably, there will always be a time t0 > 0, so that when
Furthermore, based on the characteristics of two-loop SMC, how the bounded convergence of angular rate affects the attitude tracking of outer loop must be considered. Hence, in the following discussion, the results of stability analysis of inner loop will be applied to analyse the outer-loop stability.
Choose the same Lyapunov function as equation (15)

The derivative of V4 is

Substituting equation (21) into equation (52) yields

Recall the definition of R(⋅) in equation (4), it can be concluded that

To make
To sum up, in order to avoid chattering, the modified outer-loop controller (21) and inner-loop controller (40) are used to replace equations (17) and (32), which guarantee the attitude bounded convergence.
Simulation results
In this section, simulation results are given to verify the effectiveness of the designed FTC scheme. The moment of inertia tensor is given in the study by Shtessel and McDuffie 29 and taken as

It is assumed that the initial attitude angle vector and angular rate vector are
The derivative of ωc is needed in the inner-loop controller. To avoid the explosion of complexity in calculating the derivative, the following first-order filter is applied to get the differential of ωc

where
For the purpose of comparison for the effectiveness of FTC, the FTC approach that was developed in the study by Zhao et al. 11 is used to compare with the proposed FTC method in this article. Two cases are simulated.
Case 1: Only additive fault effects on the system.
When t ≥ 20 s, the system undergoes additive time-varying fault, and the details are described as

where
The simulation results for this case are shown in Figure 1
to 4. From Figure 1, it is clear that the additive fault
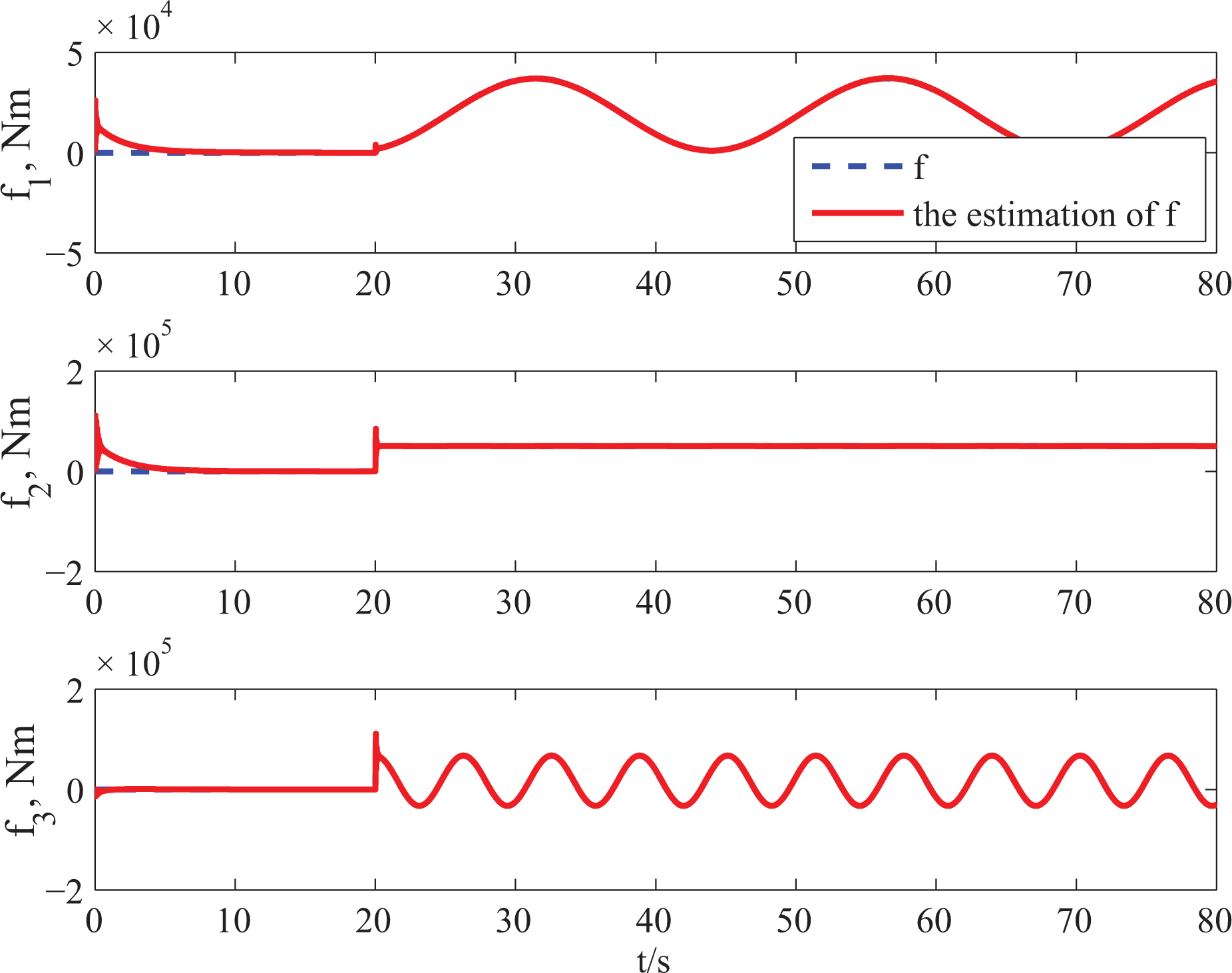
Additive fault
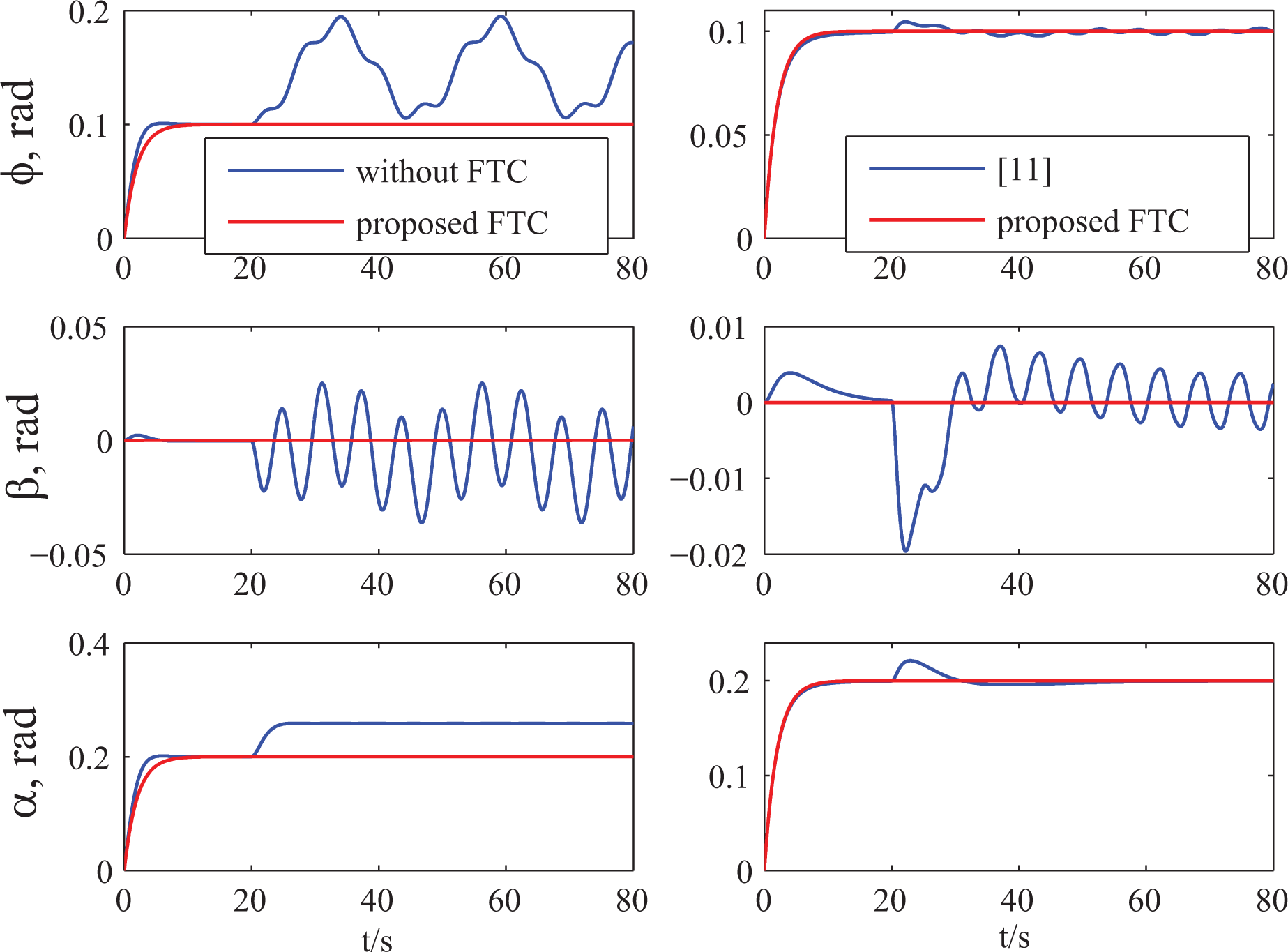
Attitude angle tracking responses under case 1.
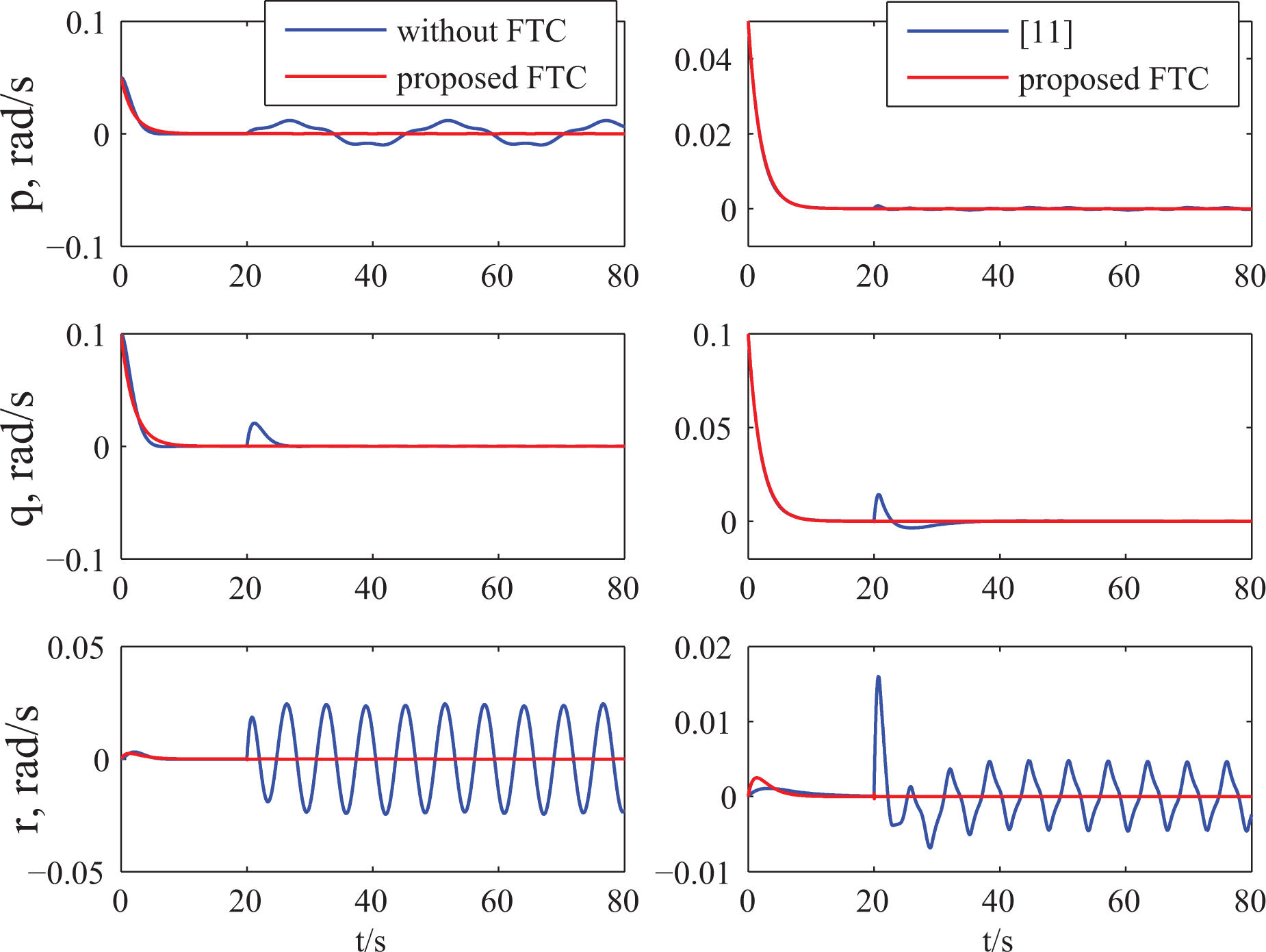
Angular rate responses under case 1.

Control torques responses under case 1.
Case 2: Both additive and partial loss of effectiveness faults appear in the system.
When t ≥ 40 s, there exist both additive and partial loss of effectiveness faults, and the effectiveness matrix is given by

Attitude angle tracking responses under case 2.
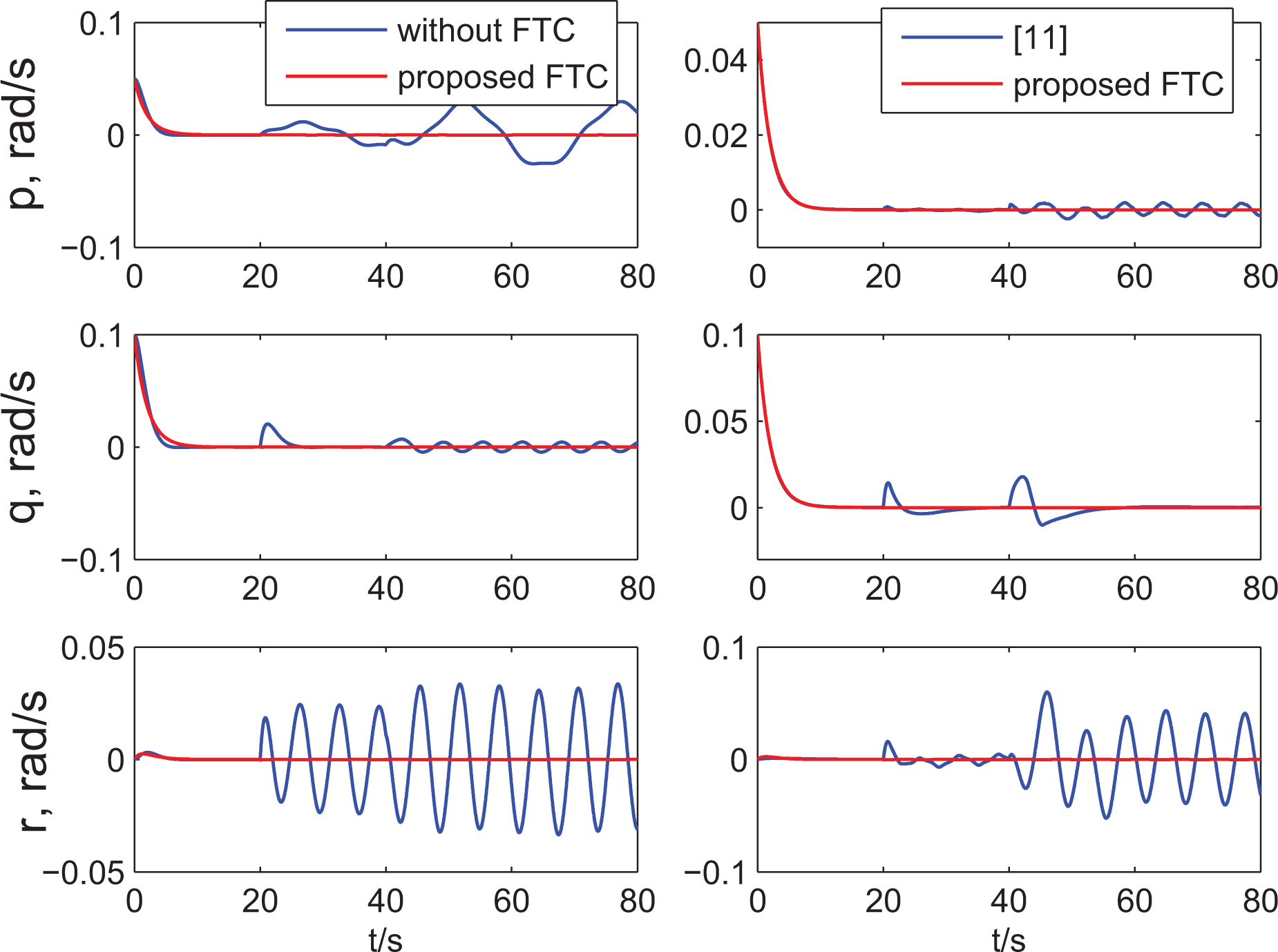
Angular rate responses under case 2.

Control torques responses under case 2.
Conclusions
In this article, an adaptive sliding mode FTC scheme based on the RBFNN technique has been proposed for a hypersonic vehicle with external disturbances and two kinds of faults. An RBFNN is designed to estimate the unknown additive fault, and the unknown partial loss of effectiveness fault is handled by the adaptive method. Under some reasonable assumptions, the two-loop sliding mode fault-tolerant controllers are designed to guarantee the asymptotical attitude tracking even with the presence of two kinds of faults and external disturbances. The designed fault-tolerant controller does not require any online fault diagnosis to obtain the lower bound on the effectiveness factor of the partial loss of effectiveness fault. The proposed FTC scheme is proved to have excellent control performance. Furthermore, simulation results evaluate the validity of the proposed control scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation under grants 61374116 and 61533009 and the Six Talent Peaks Project in Jiangsu Province (No. HKHT-010).
Appendix 1
In this article, the norm of a vector