
Abstract
A new method of fault detection and fault-tolerant control is proposed in this article for mechanical systems and aeronautical systems. The faults to be estimated and diagnosed are malfunctions that occurred within the control loops of the systems, rather than some static faults, such as gearbox fault, component cracks, and so on. In the proposed method, two neural networks are used as online estimators, the fault will be accurately estimated when the estimators are adapted online with the post-fault dynamic information. Furthermore, the estimated values of faults are used to compensate for the impact of the faults, so that the stability and performance of the system with the faults are maintained until the faulty components to be repaired. The sliding mode control is used to maintain system stability under the post-fault dynamics. The control law and the neural network learning algorithms are derived using the Lyapunov method, so that the neural estimators are guaranteed to converge to the fault to be diagnosed, while the entire closed-loop system stability is guaranteed with all variables bounded. The main contribution of this article to the knowledge in this field is that the proposed method can not only diagnose and tolerant with constant fault but also diagnose and tolerant with the time-varying faults. This is very important because most faults occurred in industrial systems are time varying in nature. A simulation example is used to demonstrate the design procedure and the effectiveness of the method. The simulation results are compared with the two existing methods that can cope with constant faults only, and the superiority is demonstrated.
Keywords
Introduction
Fault detection (FD) and fault-tolerant control for industrial systems have attracted great attention in the past few decades and different methods have been proposed. A popular method for FD of nonlinear dynamic systems is using a nonlinear state observer1–3 or a fuzzy observer-based method.4,5 In these methods, observers were used to predict system state. The residual would then be generated as a function of state estimation error. While the fault occurrence can be detected, however, the identification of fault amplitude will normally be difficult. Therefore, these methods do not make a large contribution in passive fault-tolerant control design. Another type of the FD system uses a nonlinear dynamic model to predict system output. The model can be constructed with fuzzy logic or neural networks.6,7 A function of the modelling error was then used as the detection residual. These models are not adaptive and therefore the system uncertainties will significantly affect the detection accuracy. If these models are adapted online to cope with model uncertainty, the fault will also be accounted as model uncertainty and the residual will be insensitive to the fault. In recent years, a nonlinear observer with an online estimator method8–10 attracted much attention of researchers. This method uses an online estimator in the dynamic equation of the system to estimate a fault or disturbance. While the fault is estimated by the online estimator and compensated for in the state dynamics, the observed state under the fault condition converges to the nominal system state. It therefore naturally forms a passive fault-tolerant control strategy.
For fault-tolerant control techniques, recently developed methods include the use of adaptive neural networks, 11 back-stepping method, 12 colony-based optimization method, 13 least-squares support vector machine intelligent diagnosis method with improved particle swarm optimization algorithm, 14 terminal sliding mode control method, 15 and so on. The adaptive observer method for fault-tolerant control usually uses an online estimator to estimate a fault, where the fault estimator can be implemented using different components and are adapted with different learning algorithms. A radial basis function (RBF) network was used in Trunov and Polycarpou 16 and Polycarpou and Trunov 17 as the online estimator, and a projection-based learning algorithm was developed to tune the weights of the network. As the reported work was in an early stage, simulations showed that the tuning of the estimator is very difficult and the convergence of the estimation is slow. Rather than directly estimating disturbance, neural networks have also been used to estimate unknown parameters in a nonlinear uncertain system without combining with a nonlinear state observer. In the air-to-fuel ratio (AFR) control of air path in a spark ignition (SI) engine using a sliding mode method, 18 an RBF network was used to estimate two unknown parameters, the partial derivative of air passed the throttle with respect to the air manifold pressure and that with respect to crankshaft speed. The adaptive law of the network estimator was derived so that the states out of sliding mode will be guaranteed to converge to the sliding mode in finite time. Moreover, an RBF network was used to estimate the optimal sliding gain in Wang and Yu 19 to achieve an optimal robust performance in AFR control against model uncertainty and measurement noise.
If an external disturbance is a matched one or the distribution matrix of the system fault is the same as that of the control input, robust control can be achieved easily by using a basic sliding model method. For mismatched disturbance, Chen et al. proposed a disturbance observer for a class of nonlinear systems,20–22 which can estimate a constant disturbance but cannot estimate a time-varying disturbance. A sliding mode method was developed for disturbance estimation in Yang et al., 23 which used the disturbance observer of Chen et al. 20 in the sliding surface. While the disturbance estimation converges, the initial state out of the sliding mode would converge to the sliding mode. The method can guarantee the stability of the whole system, but is still robust to constant disturbance only. So, the aforementioned method will have very limited applications in practice as most faults considered in real industrial systems are time varying. Compared with the above commented disturbance observer-based methods, the proposed method in this article has advantage of diagnosing and tolerant with time-varying faults. The disturbance observer was also used in Kayacan et al. 24 to design a robust control for nonlinear systems. In this method, the disturbance estimation was achieved by combining the disturbance observer with a type-2 neural-fuzzy network (T2NFN) in Kayacan et al. 25 and was tuned by combining three adaptive laws: a conventional estimation law, a robust estimation law and the T2NFN law. While the method can estimate time-varying disturbance without bias, the structure of the estimation system is rather complex and the computing load is high. Besides, some other disturbance observer–based methods have also been developed for robust control, such as Wei et al.26,27 However, the two methods in Wei et al.26,27 are for stochastic systems.
A class of nonlinear systems discussed in this aticle is described by the state space model in equation (1). The model represents many industrial systems, including magnetic levitation suspension systems, 28 the chaotic Duffing oscillators, 29 a three-dimensions of freedom model helicopter system, 11 near space vehicle systems, 30 robotic manipulators, 31 and so on. The motivation behind the development of the new method in this article is to propose a new fault diagnosis and fault-tolerant control method for this class of nonlinear systems using a full-order sliding mode observer combined with two neural network fault estimators. The major expectation is to use the developed method for fault-tolerant control for mechanical systems and aeronautical systems in the follow-up research.
The novelty and contributions of the proposed method in this article are as follows. The method uses a sliding mode approach and includes an online fault estimator in the sliding surface. The major contribution in this article is that the proposed method can detect time-varying faults compared with the existing methods that can detect constant fault only. Furthermore, the time-varying faults can be estimated via the two RBF networks, and the fault-tolerant control is achieved by compensating the impact of the fault on the system performance. Here, one network is used to estimate fault, while another RBF network is used to online estimate the first-order derivative of the fault with respect to time, and is included in the control law, so that the time-varying fault is diagnosed. The occurred fault is not only detected but also its format, size, location and occurring time have also been diagnosed or identified.
The Lyapunov method is used to derive the adaptation laws for the two RBF estimators, so that the convergence of the two estimators and the stability of the entire system are guaranteed. Under the proposed control strategy, closed-loop stability of the underlying system will be guaranteed and performance maintained when a fault occurs in the system. The fault-tolerant control is achieved by reconstructing the fault with the two neural estimators, and the fault occurrence is reported with the identified fault size and occurrence time, which are used for later maintenance. A numerical simulation is used to evaluate the developed method and results prove the effectiveness of the method in detecting a fault, estimating fault amplitude and passive fault-tolerant control by automatic fault compensation. The article is organised in the following way. The sliding mode control and fault estimators are described in section ‘FD system’. Convergence of the adaptive laws for the fault estimators and system stability are proved in section ‘Stability analysis’. Section ‘Simulation example’ gives a simulation example and section ‘Conclusion and future work’ draws some conclusions.
FD system
Consider the following second-order nonlinear system with mismatched disturbance

where
For the purpose of FD and fault-tolerant control, we propose to estimate the fault d(t) using an RBF network. As a class of linearly parameterized neural networks, an RBF network can approximate any smooth nonlinear mapping to any accuracy if provided with enough hidden layer nodes due to its universal approximation ability. The fault


where

where

where

where
A sliding mode control is developed for the system in equation (1) with the sliding surface designed as follows

where

where

Here,


where superscript or subscript d denotes the estimated disturbance-related parameters or variables, while g denotes the estimated first-order derivative of disturbance-related parameters or variables.
Assumption 1. Disturbance estimation error,

where
Assumption 2. Estimation error of disturbance derivative,

where
The estimate of disturbance is used as FD residual. In this way, not only the fault alarm can be triggered when a fault occurs but the fault amplitude can also be identified. The estimation of the fault is then used in the control system as compensation to form the fault-tolerant control. The fault-tolerant control configuration is displayed in Figure 1.

Schematic of the fault-tolerant control system.
Stability analysis
For the sliding surface designed in equation (7) and control law in equation (8), we now prove system stability and neural estimator convergence.
States converge to sliding mode
A Lyapunov function is chosen as

From equation (7) we have

Using equation (15), we have

It is evident in equation (16) that if k is designed such that
Convergence of neural estimators
To make sure the estimation error converges to the minimum, it requires that the neural estimator weights
Theorem 1
Consider the nonlinear system in equation (1), given assumption 1 equation (12) and assumption 2 equation (13), if the two neural estimators are updated using the adaption law as follows


the system states will be guaranteed to be attracted on the sliding mode equation (7) and the two neural estimators will converge to the optimal estimators given in equation (6).
Proof
A Lyapunov function as follows is designed

where

In equation (20), if we choose adaptive law for neural estimator weights as follows


then equation (20) becomes
It can be seen that the two learning rates will affect the value of the adaptive law of the neural estimators. Therefore, a bigger value of learning rate may cause the updating unstable, while a small learning rate will cause slow learning. This can be tuned in the simulation.
Tracking control
We consider the case of zero reference. When the state converges to the sliding surface

Substituting equation (23) into equation (1)

Lemma 1
If a nonlinear system
According to Lemma 1, as

As equation (25) is input-to-state stable and
Theorem 2
Consider the nonlinear system equation (1) with fault
Simulation example
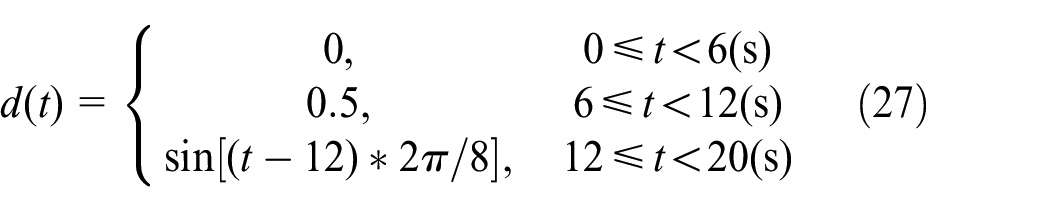
The numerical example used in Yang et al. 23 is adopted in this article to demonstrate the effectiveness of the developed novel method. Consider the following nonlinear system
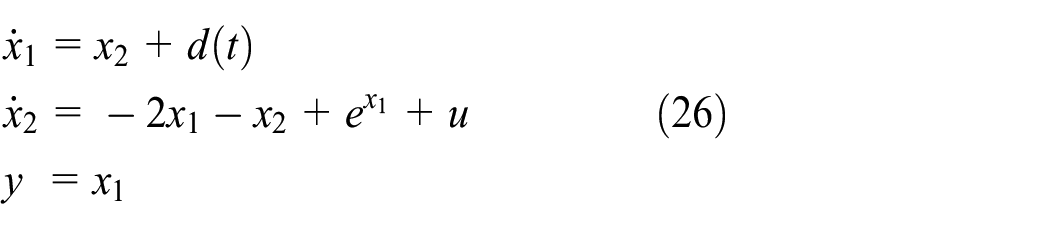
with the initial states
Here, a basic sliding mode control without rejecting disturbance and an integral sliding mode control rejecting constant disturbance as used in Yang et al. 23 will also be simulated for comparison.
The basic sliding mode control has the sliding surface

and the control law is

The design parameters are
Basic sliding mode control performance.
It can be observed that the output is deviated from the reference value, r = 0 for t = 6 s–12 s for the constant disturbance, and for t = 12 s to t = 20 s for the time-varying disturbance.
The integral sliding mode control uses the sliding mode

and the control law is

The design parameters are

Integral sliding mode control performance.
We can see that the output is insensitive to the constant disturbance from t = 6 s to t = 12 s, but deviates away from zero for the period t = 12 s to t = 20 s.
The method developed in Yang et al.
23
used a disturbance observer to estimate the disturbance, based on which a siding mode control law is derived. However, due to that the disturbance observer can estimate a constant disturbance
In the simulation of our developed neural estimator-based fault diagnosis and fault-tolerant control, the network parameters for the two RBF networks are set as:
Estimator
Estimator
The adaptation algorithms in equations (17) and (18) are used to update the weights with the learning rates
The control parameters are chosen as

with

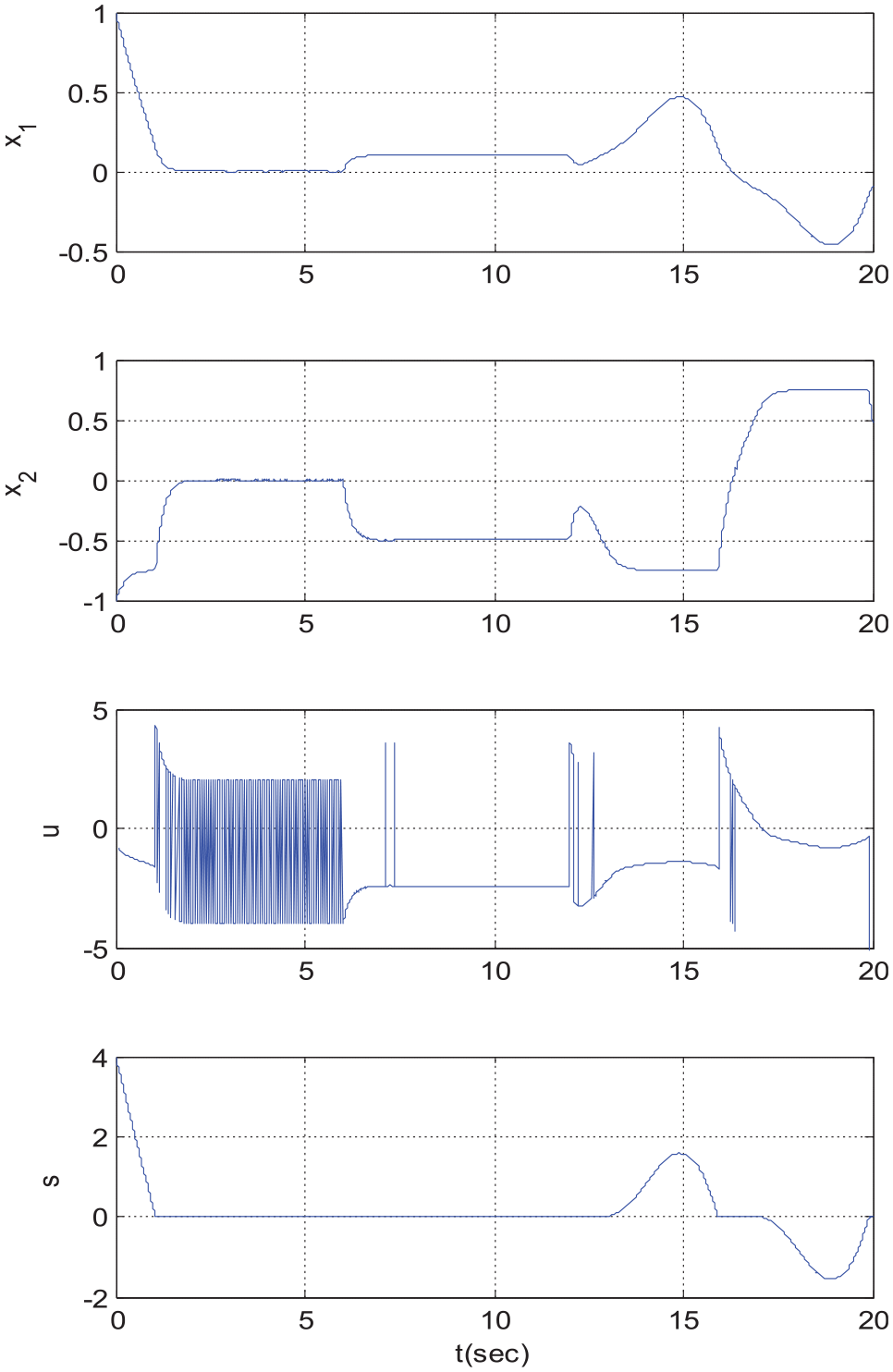
System states, input and sliding mode.

Estimated disturbance, its derivative and network weights.
From Figure 4, we can see that the output
Conclusion and future work
The article proposes a new fault diagnosis and fault-tolerant control method for a class of nonlinear systems. Two neural network fault estimators are used in a sliding mode strategy and their online adaptation algorithms are derived. Both constant and time-varying faults are accurately estimated online for FD and identification purposes. With the estimated fault compensation, fault-tolerant control is achieved in terms of maintaining the entire system stability and closed-loop system performance. A numerical example is simulated to demonstrate the effectiveness of the proposed method. As the method is simple and straightforward to implement, it has a great potential to be applied in real fault-tolerant control for industrial systems.
The future work following the presented research is to apply the developed method to a few mechanical systems and aeronautical systems, such as a wind turbine generation system and an autonomous under-water vehicle system. For such systems, fault analysis and modelling are important and essential. Then, the developed method will be applied to diagnose and tolerant control with these faults. It would be necessary to consider noise impact and to express the effects of some other unavoidable external disturbances. These will further prepare the proposed method for real applications.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.