In this article, a neural network–based tracking controller is developed for an unmanned helicopter system with guaranteed global stability in the presence of uncertain system dynamics. Due to the coupling and modeling uncertainties of the helicopter systems, neutral networks approximation techniques are employed to compensate the unknown dynamics of each subsystem. In order to extend the semiglobal stability achieved by conventional neural control to global stability, a switching mechanism is also integrated into the control design, such that the resulted neural controller is always valid without any concern on either initial conditions or range of state variables. In addition, deterministic learning is applied to the neutral network learning control, such that the adaptive neutral networks are able to store the learned knowledge that could be reused to construct neutral network controller with improved control performance. Simulation studies are carried out on a helicopter model to illustrate the effectiveness of the proposed control design.
In the past decades, the unmanned aerial vehicles have been widely studied since they provide a promising manner to fulfill the increasing demands in both commercial and industrial applications. Particularly, the research works of unmanned helicopters have gained much attention since they provide efficient solutions for many important tasks, such as land surveillance, forest fire monitoring, traffic condition assessment, and mineral exploration in a field of aerial aspect.1–5 On the other hand, the controller design for helicopters faces a number of challenges, due to the inherited features embedded in the helicopter dynamics, such as high nonlinearity, strongly coupling, and uncertainties presented in the helicopter dynamics.6 The aforementioned features greatly increase the difficulty of the attitude and position control of helicopter, and therefore, the controller design has been focused by numerous researchers.7–12
To guarantee a safe and stable flight of the helicopters, a large number of effective control schemes have been developed, for example, adaptive control,13,14 fuzzy control, neural network (NN)-based intelligent control,15–17 sliding mode control,18 backstepping control,19 robust control,20–22 and so on. In the study by Chen and Yu,18 a terminal sliding mode control with disturbance observer was employed to estimate modeling uncertainties and external disturbances. To deal with the uncertain external disturbances, modeling uncertainties, a neural controller was designed for a 3-DOF helicopter model.6
In practical applications, helicopter systems are typically difficult to be modeled accurately due to the presence of unknown aerodynamical disturbances and the strongly coupled dynamics, thus it may not be suitable to use model-based control methods, which perform well when the system dynamics is perfectly known.
When the control input of model-based feedback is affected by the unknown disturbances and uncertainties, the system performance may be degraded or even unstable. Therefore, it is important for us to handle the helicopters’ control in the presence of structural and parametric uncertainties, since little knowledge about helicopter dynamics parameters is available. To deal with these uncertainties, particularly, the unstructured model uncertainties, the model-free control design approaches have been extensively studied. One of the most widely employed control methods is the NN-based intelligent controller, which utilizes the powerful universal approximation ability of NN to compensate for unknown dynamics.23–32 In the work of Xu et al.,25 an NN tracking control was employed to approximate the unknown hypersonic flight vehicle dynamics. In the work of Cheng et al.,26 an NN control was constructed to compensate the complicated nonlinearity of the robot dynamics. In the work of Ren et al.,33 an NN controller was employed to control a large class of nonlinear systems with unknown input hysteresis. The NN control has also been successfully developed in applications such as NN-based discrete backstepping for hypersonic flight vehicle,34 adaptive NN output feedback control for discrete-time nonlinear systems,35 and discrete-time output feedback NN control in the presence of uncertain control directions.36
It should be noted that, although the control performance can be well achieved without using the information of system dynamics, the aforementioned NN control methods only ensure the semiglobally uniformly ultimately boundedness (SGUUB) stability of the closed-loop signals, due to the approximation of NN is only valid in a certain compact set, the so-called NN’s approximation domain. Therefore, the range of NN input should be within this approximation domain. However, it is hard for us to precisely identify such a compact set beforehand, particularly for the highly nonlinear complicated systems. When the NN inputs not remain the compact set, the NN controller could become invalid. As a result, the control performance will be deteriorated and instability may even occur. Therefore, it is necessary to design an NN controller with guaranteed global stability. To achieve globally uniformly ultimately boundedness (GUUB) stability of strict-feedback systems, a robust adaptive neural controller was developed in the study by Huang.37 To ensure GUUB stability of hypersonic flight vehicle systems, an adaptive NN control was proposed in the study by Xu et al.,25 where the unknown dynamics is assumed to be in a strict-feedback form.
It should be emphasized that conventional adaptive NN control needs to adapt online the NN weights at the start of a task, and the convergence of their optimal values is not ensured.38 Even taking a same task, we still need to adapt the NN weights in a new around with the initial values. Therefore, the idea that achieves the convergence of the estimated parameters, while utilizing the knowledge to improve the control performance, the so-called deterministic learning, is proposed in the study by Wang and Hill.39 Using the deterministic learning method, we can store the weight information of radical basis function neutral network (RBFNN) in a constant form and then obtain the fundamental information of dynamical patterns.39 On the other hand, it is important to ensure the convergence of the estimate parameters in deterministic learning. To guarantee parameter convergence of dynamical identification process, persistent excitation (PE) condition should be satisfied.38 Using deterministic learning theory, we can accumulate dynamics of fundamental knowledge-based-on-system, store, and represent it by constant RBF networks when tracking a periodic-like reference trajectory.39 The deterministic learning theory is employed in various applications, such as dynamical pattern recognition, marine surface vessels learning control, and oscillation faults diagnosis.24
Inspired by the aforementioned works, in this article, we propose an NN control enhanced by deterministic learning techniques for the helicopter systems, and special mechanism is embedded in the control design to ensure global stability of the NN control.
Model dynamics and preliminaries
Helicopter dynamics
The dynamic equation of a helicopter could be described in Lagrangian form as follows
where , with q1, q2, and q3 represent the position of the altitude, position of the yaw angular, and position of main rotor of the helicopter, respectively. is the inertia matrix, represents the vector of the Coriolis and centrifugal forces, stands for the gravity term, represents the friction force, is the input of the controller, and is a matrix with respect to the control coefficients.
To facilitate the controller design of the helicopter and better exploit helicopter’s physical properties, we use the assumption that the unknown dynamical parameters and structure of helicopter system can be described as follows
where m11, m23, m33, g1, and g3 are unknown constants, are unknown functions. The following properties of the helicopter dynamic are employed to facilitate the controller design.
Property 1
The terms m12 and m13 in could be set to zero entries, and M is a positive definite inertia matrix and is a skew-symmetric matrix, that is12
Property 2
The terms m11, are positive definite. The following equality holds for .12
Additionally, the following assumptions are employed to simplify the design of the controller.
Assumption 1
The reference position trajectories of the attitude and yaw angle and the time derivatives of them, , are bounded and continuously differentiable up to third order for all .
Assumption 2
The control input and state variables of the helicopter system q, are all available. The terms c11 and c22 are bounded, such that , where are known positive functions.
In the dynamics of the helicopter, as seen from equations (1) and (2), the are coupled, which greatly increase the difficulty of the control design based on equation (1) directly. In order to simplify the system description and further develop controller for the helicopter, we decompose the systems (1) and (2) into three subsystems as follows
After the aforementioned manipulations, we can perform system analysis and develop controllers for the subsystems.
Preliminaries
Radical basis function
In this article, we use the RBFNNs to approximate an unknown continuous function as follows7
where is the input vector, is the vector of NN weight, N is the number of NN nodes, is the regressor vector, and is an RBF. The most commonly used Gaussian RBFs are implemented as follows
and are distinct points with being the receptive field center and ϑi is the width of the receptive field. It has been proven that with sufficiently large number of nodes, RBFNN (7) could approximate any continuous function with arbitrary accuracy over a compact set ΩZ as
where W* is the ideal constant weight vector, and is the NN construction error. There exists an ideal weight vector W* such that with constant for all . W* represents the value of W that could minimize , that is
Note that the ideal weight vector W* is only used for analytical purposes. For real applications, we use the estimation .
Spatially localized approximation
The spatially localized approximation (SLA) of a localized RBF means that for any bounded trajectory remaining in a compact set, an unknown continuous function can be approximated by a limited number of RBFs and neural nodes in a local region close nearby the trajectory,38 that is
where with ς is a small positive constant, εξ is the construction error.
Lemma 1. (Partial PE condition)
Consider that the trajectory is periodic or recurrent and remain in the compact set Ω, is continuous and is assumed to be bounded, and the centers of the localized RBF placed on a regular lattice (which means that the centers of NN could cover the compact set Ω), then the subvector satisfies the PE condition.40
Remark 1
For the adaptive control and identification of the nonlinear system, the satisfaction of PE condition could ensure the convergence of the estimated parameters, and we can then reuse them in the learning control system without readaptation. However, the priori verification of the PE condition is difficult for identification of the nonlinear system. Based on the result of partial PE condition given in the literature,40 the localized RBFNN can be applied in the learning system by utilizing its function approximation ability, linear-in-parameter form, spatially localized ability, and the satisfaction of PE condition. The “partial” PE condition also means that the NN input trajectory does not need to visit all the centers of the regular lattice PE condition that hold for as long as is periodic like and stays within the regular lattice.
Useful function and key lemma. Definition 1
Let us define a set of switching functions as
where
where are positive constants satisfying that , and ϖ is a designed constant with .
For a helicopter system with being the altitude position and yaw angular, respectively, and the main rotor angular, our control goal is to develop an adaptive NN controller to ensure that (i) the altitude position and yaw angular of the helicopter could track a predefined trajectories , while ensuring the tracking errors fall into a small neighborhood around zero; (ii) guarantee the stability and boundedness of the rate of main rotor angular ; (iii) all the signals in the helicopter system remain GUUB.
Adaptive NN learning control design
To achieve the aforementioned control goals, we first defined the residual tracking errors for the helicopter subsystems as
where γi is a selected positive constant, . In terms of the results in the study by Lewis et al.,41 if the filtering error si is bounded, we can obtain the boundedness of the tracking errors ei and . Then, the following auxiliary reference signals are designed as
where are reference trajectories of the velocity and acceleration, respectively.
q1 subsystem
Using the definition of , and s1, the subsystem for can be rewritten as
Then, let us consider the following Lyapunov function for the q1 subsystem as
Since the velocity of the main rotor should satisfy to overcome the gravity and lift the helicopter up, thus , therefore is a Lyapunov candidate. Differentiate Vs1 with respect to time gives
Let us define an auxiliary function f1 for the V1 as
where is a positive function with respect to and satisfies that .
Using the universal approximation property of RBFNN as mentioned in lemma 1, we can approximate the unknown function by an RBFNN in the compact set Ω1 as
where is the optimal NN weight vector, L1 is the number of NN nodes, is the basis function vector, and is the NN construction error. It should be noted that is an unknown constant vector, and it would be estimated by , which is the estimation of .
Using the RBFNN control in equation (24), we can develop the global NN control input τ1 for the q1 subsystem as follows
where k1 is designed positive constant and is a switching function as defined in equation (13)
where is the estimate of f1, and we assume that f1 is bounded by known nonnegative smooth function with , and ω1 is a positive parameter.
The NN weight adaptive law is designed as
where Γ1 is a positive definitive matrix and σ1 is a positive constant.
Remark 2
The controller proposed in equation (25) consists of an adaptive NN controller and an extra robust controller combining with a smooth switching function . As seen from Figure 1, when the tracking runs in the NN active domain Ω1, the term plays a decisive role, implying that the controller turns into a pure adaptive NN control. Once the NN runs out of the Ω2, the extra robust term will take charge of the control and pull the state back to Ω2. If the NN runs in the domain between the Ω2 and Ω1, the switching mechanism will work and pull the state to compact set Ω1.
Global tracking.
Then, let us consider the Lyapunov function V1
where . Differentiating equation (28) with respect to time, we have
Substituting the control law (25) and the NN adaptive law (27) in equation (29), we have
Note that the following inequalities holds in term of lemma 2
The following relation can be easily obtained according to the Young’s inequality
where . Then, according to the Lyapunov theorem and in terms of equation (33), we can obtain that s1 converges to a small residual set around zero by
q2 subsystem
Considering the q2 subsystem in equation (5), similar to the analysis of q1 subsystem, let us define a Lyapunov candidate for the q2 subsystem as
According to property 3, and since is negative, we can obtain that is a valid Lyapunov candidate. Taking the deviation of equation (35) with respect to time, we have
Using the definition of , and s1, we can obtain that . Then, the q2 subsystem can be rewritten as
Using the approximation ability of RBFNN, the unknown system dynamics can be formulated as
where is the optimal NN weight vector, L2 is the number of NN nodes, is the basis function vector, and is the NN construction error.
Then, the global NN controller for q2 subsystem is designed as follows
where k2 is a selected positive gain, and has been defined in equation (13)
where is the estimate of f2, and f2 is bounded by known nonnegative smooth function with , ω2 is a positive parameter.
The NN weight adaptive law is designed as
where Γ1 is a positive definitive matrix and σ1 is a positive constant.
Substituting equations (43) to (45) into equation (41), and similar to the analysis in subsection “Problem formulation,” we can obtain that
where . Then, according to the Lyapunov theorem, we can obtain that s2 converges to a small residual set around zero by
q3 subsystem
In this subsection, we will investigate the stability of q3 subsystem. In practice, the velocity of the main rotor should satisfy to overcome the gravity and lift the helicopter up. From systems (4) to (6) with control laws (25) and (43), we can rewrite q3 subsystem as follows
where . Then, the zero dynamics of equation (48) can be obtained as
with . Assume that system (48) is hyperbolically minimum phase, which means that the system zero dynamics (49) is exponentially stable. We also employ the assumption that the reference signals are all bounded and u is the control input with respect to ξ and η. Assume that the function satisfies that
where Pξ and Pf are constants. Then, the stability of q3 subsystem is hold according to the following lemma.
Lemma 3
For the system as defined in equation (48), under assumptions 1 and 2, there exist positive constants Pη and T0, such that12
Stability analysis
Theorem 1
Consider the subsystems of helicopter dynamic in (4) (5) (6) with the tracking errors (15) under assumptions 1 and 2, employ the global NN controllers (25) and (43) with the NN weight adaptive laws in equations (27) and (45), then we have (i) all the signals remain GUUB and (ii) the tracking errors e1 and e2 converge to a small neighborhood of zero.
Proof
From the previous analysis, we find that , τ1, and τ2 are bounded and the filtered tracking errors s1 and s2 converge to a small compact set around zero, respectively. Then, substituting equation (15) into equations (33) and (46), we have
where . The solution of the inequalities can be derived as follows
Then with , we can obtain that
Then, let us investigate the boundedness of the closed-loop signals of the helicopter system. For the states variable qi and , since ei is bound, and are bounded in terms of assumption 1, we find that q1, , q2, and are bounded. Then, the boundedness of q3 and can be obtained in terms of lemma 3. Hence, we can deduce that all the closed-loop signals of the system are GUUB. In addition, the tracking errors e1 and e2 are also bounded by appropriately choosing the control gains k1, k2, γ1, and γ2. This completes the proof.
Remark 3
The designed control gains k1 and k2 in the controller should be chosen simply as positive constants, satisfying that , while λ1 and λ2 should be chosen as positive constants. The gains in the NN adaptive laws Γ1 and Γ2 should be positive. If the gains k1, k2, Γ1, and Γ2 are chosen to be relatively large, while the σ1 and σ2 chosen to be relatively small, then the amplitude of tracking error could be made smaller.
Knowledge-reused NN control design
In this section, we will show that the adaptive NN controllers (25) and (43) with NN weight adaptations (27) and (45) are able to achieve knowledge expression, acquisition, and storage of uncertain system dynamics f1 and f2 in the steady-state control process. Then, the learned constant NN weights can be reused in the design of neural learning control to improve the control performance.
To achieve an accurate estimation of the converged NN weight, we will show that the inputs of NN, , are recurrent orbit. According to Theorem 1, we have shown that tracking error converges to a small neighborhood around zero. Since and qid is a recurrent orbit, thus qi is recurrent orbit. It has also been proven that the filtered error si falls into a small neighborhood of zero, and γi is a bounded parameter; from equation (15), we know that is also recurrent orbit. Therefore, the input of RBFNN, , is the recurrent signal and the regressor subvectors, , satisfy the PE condition. Then, the results of NN learning ability can be formulated by the theorem below.
Theorem 2
Considering the helicopter system defined in equations (4) to (6), the filtered tracking errors in equation (15), and the NN adaptation law (27) and (45), for any recurrent orbit φi, and initial conditions , we have that the NN weight estimate converges to small neighborhoods of its optimal value along , and the system dynamics could be approximated accurately by either or to the desired error level as
where is close to εi in the steady-state process and is defined as
where denotes the time segment in the steady stage.
Proof
According to Theorem 1, we have that in the steady stage, the system states q1, q2, and tracking errors q1 and q2 subsystems can converge to small compacts. Therefore, it is reasonable for us to employ the assumption that the inputs of the NN would remain in a compact set after the transient stage. Hence, the NNs controller are always valid at the steady stage, and the controller can be rewritten as follows
Let us employ the SLA ability of RBFNNs with the controller (57), then the q1 and q2 subsystems could be rewritten as follows:
where . Since , m11, m33, and are positive and is negative, we can obtain that ψ1 and ψ2 are positive. By defining , equation (58) can be rewritten in linear time-varying form as
where . Let , we have .
Then, following the proof as in the work of Dai et al.38 and Wang and Hill,40 we can obtain that the NN weights estimate error could exponentially converge to zero. Therefore, can converge to a small neighborhood nearby the optimal NN weight . This completes the proof.□
Then, we can reuse the constant weight of RBFNN to reconstruct the static NN controller to achieve the improvement of control of the helicopter system when tracking a similar trajectory. The NN controller with learned knowledge is designed using the constant NN weight and without the NN weight updated law as
where . W1 and W2 are the constant NN weight vectors that are obtained from equation (56).
Subsequently, we can apply the developed neural learning controller with the stored knowledge to control the helicopter with improved control performance.
Simulation studies
In this section, simulation studies are carried out to illustrate the effectiveness of the proposed global NN control algorithms (25) and (43). In the simulation, the helicopter dynamics and parameters are described using the Vario model42
with
with the term chosen to be .
The helicopter is commanded to follow the reference trajectory as follows
In terms of the zero dynamics as mentioned in section “q3 subsystem”, let s1, s2, are all zero, and the desired trajectories can be obtained as
By linearizing equation (64) and substituting equation (62) into equation (64), and using the assumption that the acceleration of angular is zero, we can obtain that the equilibrium point of dynamics equation is close to and its eigenvalue is negative, which demonstrate that the helicopter dynamics has observed a stable behavior.
For the global NN control laws and adaptation laws with the input vectors , we employ totally 2187 nodes for and 19,683 nodes for , the centers of S1 are evenly spaced in, and centers of S2 are evenly spaced in , respectively. The widths are chosen as . The control gains and design parameters are selected to be . The initial states are set as .
The simulation results are shown in Figures 2 to 7.
Tracking performance of q1.
Tracking performance of q2.
Tracking errors e1.
Tracking errors e2.
Control input τ1.
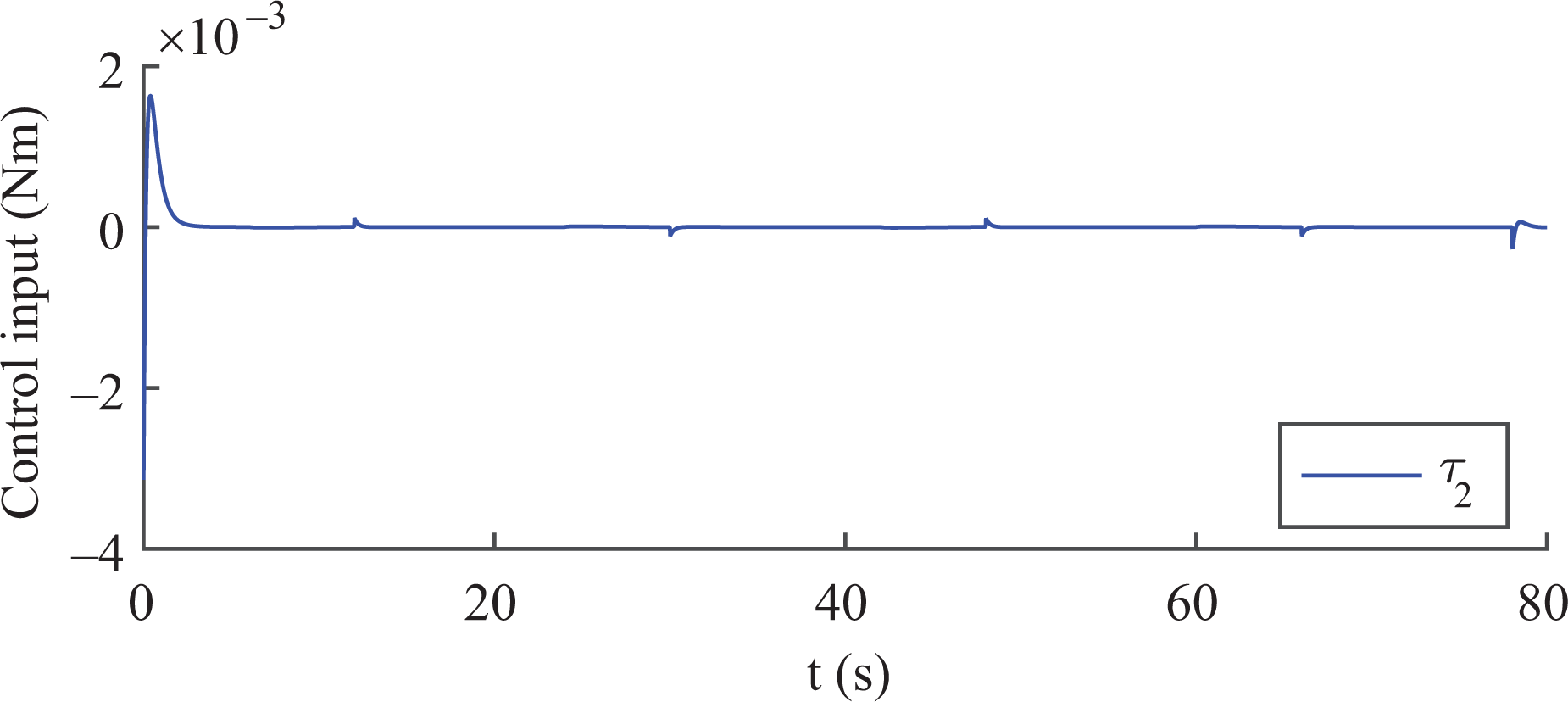
Control input τ2.
The tracking performance of the helicopter attitude position q1 and the yaw angle q2 is depicted in Figures 2 and 3.
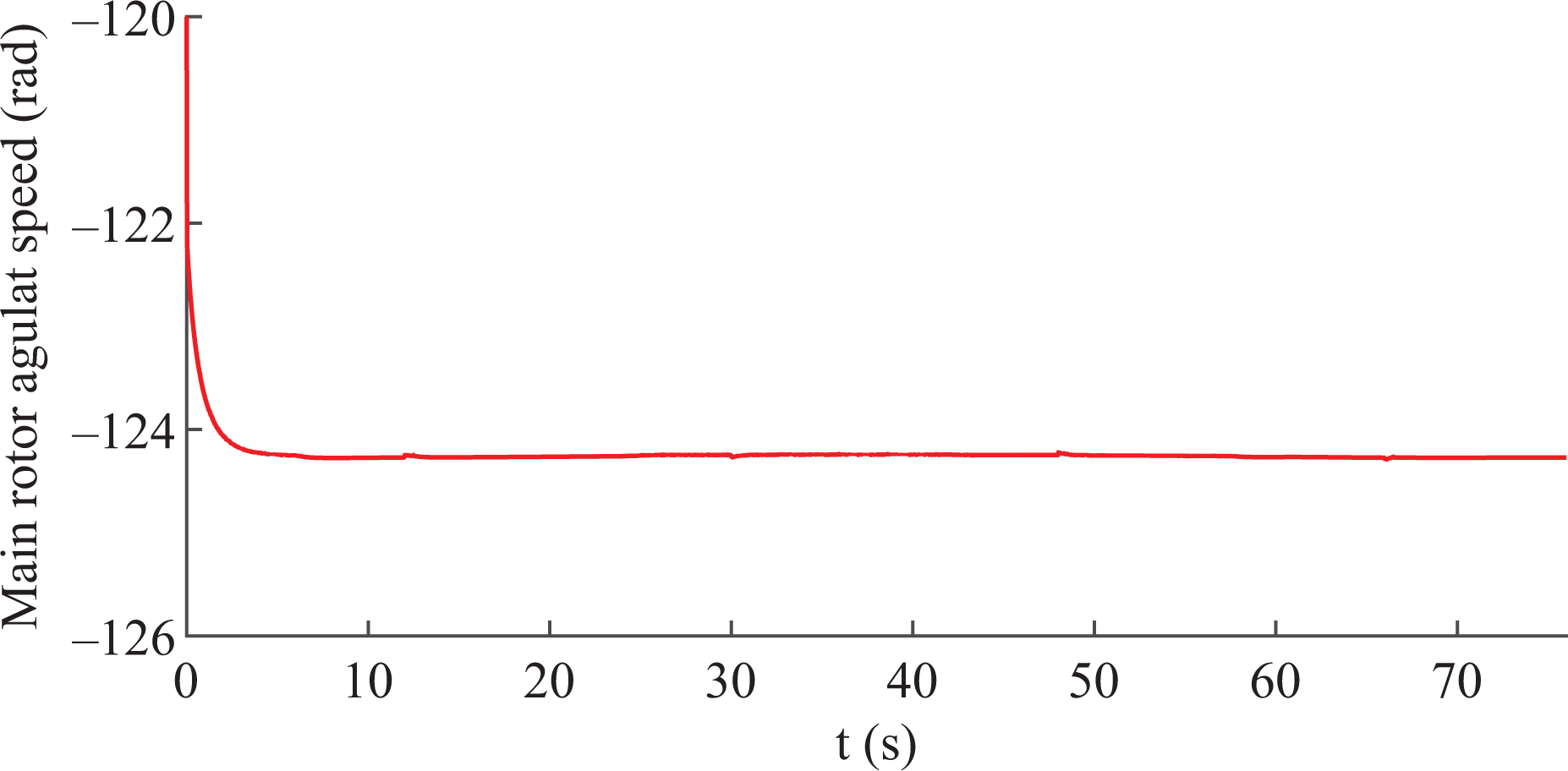
We see clearly that q1, q2, could effectively follow the reference trajectories with a good steady-state performance. This implies that the proposed controller can achieve a good tracking performance in the presence of unknown dynamics. The performance of tracking errors e1 and e2 is shown in Figures 4 and 5. As shown in the figures, using the proposed global RBFNN controller, the tracking errors converge to a small value close to zero with fast converge rate and good steady-state performance. A comparative simulation study is performed based on a model-based controller. From Figures 4 and 5, we can see that the proposed RBFNN controller is better than the model-based controller. Additionally, Figure 8 indicates that the speed of the main rotor angular is stable. Figures 6 and 7 illustrate that the control inputs τ1 and τ2 are bounded. The simulation results illustrate that our proposed global RBFNN controller can ensure the helicopter to effectively track a predefined trajectory and guarantee the tracking error converge to a small neighborhood near zero.
Main rotor angular speed .
Conclusion
This article investigates the NN control for an unmanned helicopter in the presence of unknown system dynamics. NN control is constructed to compensate the unknown dynamics of each subsystem of the helicopter. A switching mechanism is also integrated into the control design to extend the SGUUB to GUUB, such that the resulted neural controller is always valid without any concern on either initial conditions or range of state variables. Deterministic learning technique is applied to improve control performance, with the storage of the learned knowledge of the adaptive neural learning control. Simulation studies have shown the validity and effectiveness of proposed control design based on the helicopter models.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by Excellent Doctoral Innovation Foundation of South China University of Technology, National Nature Science Foundation (NSFC) under grant no 61473120, Guangdong Provincial Natural Science Foundation 2014A030313266 and International Science and Technology Collaboration grant no 2015A050502017, Science and Technology Planning Project of Guangzhou 201607010006, and the Fundamental Research Funds for the Central Universities under grant no 2015ZM065.
References
1.
BagnellJAHneiderJGS. Autonomous helicopter control using reinforcement learning policy search methods. In: IEEE international conference on robotics & automation, 2001, Vol. 2, pp. 1615–1620. IEEE.
2.
ButtMMunawarKBhattiUI. 4D trajectory generation for guidance module of a UAV for a gate-to-gate flight in presence of turbulence. Int J Adv Robot Syst2016; 13: 125.
3.
LiuXGaoLGuanZ. A multi-objective optimization model for planning unmanned aerial vehicle cruise route. Int J Adv Robot Syst2016; 13: 116.
4.
ChenMWuQJiangC. Guaranteed transient performance based control with input saturation for near space vehicles. Sci China Inform Sci2014; 57(5): 1–12.
5.
ChenMBeiBeiRQinXianWChangShengJ. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci China Inform Sci2015; 58(7): 1–12.
6.
ChenMShiPLimC. Adaptive neural fault-tolerant control of a 3-DOF model helicopter system. IEEE Trans Syst Man Cybernet Syst2016; 46(2): 260–270.
7.
ChenMSam GeSRenB. Robust attitude control of helicopters with actuator dynamics using neural networks. IET Control Theor Appl2010; 4(12): 2837–2854.
8.
SamSRenBTeeKP. Approximation-based control of uncertain helicopter dynamics. IET Control Theor Appl2009; 3(7): 941–956.
9.
RenBSam GeSChenC. Modeling, Control and Coordination of Helicopter Systems. New York: Springer Science & Business Media, 2012.
10.
RenBWangYZhongQC. UDE-based control of variable-speed wind turbine systems. International Journal of Control, 2016. In press.
11.
LiuZHuangPLuZ. Recursive differential evolution algorithm for inertia parameter identification of space manipulator. Int J Adv Robot Syst2016. In press..
12.
GeSSRenBTeeKP. Adaptive Neural Network Control of Helicopters with Unknown Dynamics. In: Proceedings of the IEEE conference on decision and control, 2006, pp. 3022–3027. IEEE.
13.
TeeKPSam GeSTayFEH. Adaptive neural network control for helicopters in vertical flight. IEEE Trans Control Syst Technol2008; 16(4): 753–762.
14.
NaJRenXXiaY. Adaptive parameter identification of linear SISO systems with unknown time-delay. Syst Control Lett2014; 66: 43–50.
15.
ChenMTaoGJiangB. Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans Neural Netw Learn Syst2015; 26(9): 2086–2097.
16.
ChenMChenWWuQ. Adaptive fuzzy tracking control for a class of uncertain mimo nonlinear systems using disturbance observer. Sci China Inform Sci2014; 57(1): 1–13.
17.
ChenMSam GeS. Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans Cybernet2013; 43(4): 1213–1225.
18.
ChenMYuJ. Disturbance observer-based adaptive sliding mode control for near-space vehicles. Nonlinear Dynam2015; 82(4): 1671–1682.
19.
ChenMShiPLimC. Robust constrained control for MIMO nonlinear systems based on disturbance observer. IEEE Trans Automat Control2015; 60(12): 3281–3286.
20.
ChenMJiangB. Robust attitude control of near space vehicles with time-varying disturbances. Int J Control Autom Syst2013; 11(1): 182–187.
21.
RenBZhongQChenJ. Robust control for a class of nonaffine nonlinear systems based on the uncertainty and disturbance estimator. IEEE Trans Ind Electron2015; 62(9): 5881–5888.
22.
NaJMahyuddinMNHerrmannG. Robust adaptive finite-time parameter estimation and control for robotic systems. Int J Robust Nonlinear Control2015; 25(16): 5045–5071.
23.
WeichuanLChengLHouZ. An inversion-free predictive controller for piezoelectric actuators based on a dynamic linearized neural network model. IEEE/ASME Trans Mechatron2015; 21(1): 1.
24.
XuBYangCShiZ. Reinforcement learning output feedback NN control using deterministic learning technique. Neural Netw Learn Syst IEEE Trans2014; 25(3): 635–641.
25.
XuBYangCPanY. Global neural dynamic surface tracking control of strict-feedback systems with application to hypersonic flight vehicle. Neural Networks Learn Syst IEEE Trans2015; 26(10): 2563–2575.
26.
ChengLHouZTanM. Tracking control of a closed-chain five-bar robot with two degrees of freedom by integration of an approximation-based approach and mechanical design. Syst Man Cybernet B Cybernet IEEE Trans2012; 42(5): 1470–1479.
27.
YangCJiangYLiZ. Neural control of bimanual robots with guaranteed global stability and motion precision. IEEE Transactions on Industrial Informatics, 2016. In press.
28.
ChengLHouZTanM. Adaptive neural network tracking control for manipulators with uncertain kinematics, dynamics and actuator model. Automatica2009; 45(10): 2312–2318.
29.
LiYSam GeSZhangQ. Neural networks impedance control of robots interacting with environments. Control Theor Appl2013; 7(11): 1509–1519.
30.
LiYYangCSam GeS. Adaptive output feedback NN control of a class of discrete-time mimo nonlinear systems with unknown control directions. IEEE Trans Syst Man Cybernet B Cybernet2009; 41(2): 1239–1244.
31.
YangCWangXChengL. Neural-learning based Telerobot Control with Guaranteed Performance. IEEE Transactions on Cybernetics, 2016. In press.
32.
DaiS-LWangCWangM. Dynamic learning from adaptive neural network control of a class of nonaffine nonlinear systems. IEEE Trans Neural Networks Learn Syst2014; 25(1): 111–123.
33.
RenBSam GeSLeeTH. Adaptive neural control for a class of nonlinear systems with uncertain hysteresis inputs and time-varying state delays. Neural Netw IEEE Trans2009; 20(7): 1148–1164.
34.
XuBZhangY. Neural discrete back-stepping control of hypersonic flight vehicle with equivalent prediction model. Neurocomputing2015; 154: 337–346.
35.
LiYYangCSam GeS. Adaptive output feedback NN control of a class of discrete-time mimo nonlinear systems with unknown control directions. Syst Man Cybernet B Cybernet IEEE Trans2011; 41(2): 507–517.
36.
YangCSam GeSXiangC. Output feedback NN control for two classes of discrete-time systems with unknown control directions in a unified approach. Neural Netw IEEE Trans2008; 19(11): 1873–1886.
37.
HuangJ. Global tracking control of strict-feedback systems using neural networks. Neural Netw Learn Syst IEEE Trans2012; 23(11): 1714–1725.
38.
DaiSWangMWangC. Neural learning control of marine surface vessels with guaranteed transient tracking performance. IEEE Trans Ind Electron2016; 63(3): 1717–1727.
39.
WangCHillDJ. Deterministic learning theory for identification, recognition, and control, Vol. 32. Boca Raton: CRC Press, 2009.
40.
WangCHillDJ. Deterministic learning and rapid dynamical pattern recognition. IEEE Trans Neural Netw2007; 18(3): 617–630.
41.
LewisFLYegildirekALiuK. Multilayer neural-net robot controller with guaranteed tracking performance. IEEE Trans Neural Netw1996; 7(2): 388–399.
42.
Avila VilchisJCBrogliatoBDzulA. Nonlinear modelling and control of helicopters. Automatica2003; 39(9): 1583–1596.