
Abstract
Using tether to replace rigid arms, the tethered space robot has more flexibility and security than the traditional space robot, which gives it a wide application prospect in the satellite retrieval. After a noncooperative satellite is captured by the tethered space robot, the tethered space robot and the satellite compose a combination with uncertain mass, inertia, and tether junction position. The tether length, tether deflection, and combination attitude are coupled seriously and control inputs are strictly limited, which make the retrieval of tethered space robot very difficult. First, a retrieval dynamic model of in-plane motion is derived using Lagrangian method. Then, in order to solve the uncertainty problems of dynamics parameters, an adaptive controller and its parameter updating law are proposed using the dynamic inversion theory. Moreover, an anti-windup strategy with auxiliary variables is derived to compensate the limited control inputs. Simulation results validate the feasibility of the proposed adaptive anti-windup control method. The noncooperative satellite is retrieved along the desired trajectory effectively.
Introduction
The tethered space robot (TSR), which consists of a gripper, a tether, and a platform, has attracted much attention for future use in on-orbit services, including on-orbit maintenance, on-orbit refueling, auxiliary orbit transfer, and space debris removal. 1 Using tether to replace rigid arms, the capture distance of TSR can reach several hundred meters long and the terminal maneuver of platform is unnecessary, which greatly improves the security of the platform and reduces the propellant consumption. 2 However, many problems may arise in the flight control of TSR for the space tether.
Research into the issue of its trajectory control can be found in many literatures. Nohmi clarified the characteristics of TSR and proposed an approaching trajectory adjustment scheme by the spacecraft-mounted manipulator. 3,4 Nakamura et al. discussed the collaborative control method using gripper thrusts and tether tension in the approaching phase. 5 Mori and Matunaga introduced a coordinated control method and demonstrated that the use of tether tension reduces the propellant consumption. 6 Huang et al. studied an optimal trajectory planning and tracking control method based on velocity impulse. 7 Williams proposed an open-loop optimal controller and a corresponding receding horizon controller for the tether deployment and retrieval. 8,9 Wen proposed an optimal feedback control by infinite horizon control theory. 10,11 Sun and Zhu studied a fractional order tension controller. 12,13 Liu et al. proposed a nonlinear output tracking control scheme based on the θ-D technique. 14 In these literatures, the tether is long and the gripper is assumed to be a mass point. It is appropriate for the traditional tether space system. However, it is not suitable for TSR with a much shorter tether. The attitude of the gripper should be considered in the dynamic modeling and the controller design.
Modi et al. studied attitude control of a rigid platform with a flexible tether connected to a rigid satellite, and the control is achieved through time-dependent offset of the tether attachment point. 15 Nohmi investigated the attitude control of gripper by an arm link and conducted a microgravity experiment to validate its feasibility. 16,17 Godard and Kumar designed a fault-tolerant nonlinear controller via tether offset variations to control the attitude of a tethered satellite. 18,19 Xu et al. studied a coordinated attitude controller by tether attachment point moving and reaction wheel rotating. 20 Huang et al. used the tether force to apply greater control torques for a tumbling combination system in the postcapture phase of TSR. 21 Huang et al. studied the attitude control problem of a tumbling combination after the target capturing. An adaptive law is designed to estimate the disturbance of attitude disturbing torque and inertia uncertainty. 22 Conversely, influences of the orbit dynamics are not considered in these literatures.
Actually, the orbit dynamics and attitude dynamics of TSR are highly coupled, both of which should be considered in the dynamic modeling and controller design. Wang et al. designed a coordinated control mechanism and proposed a coordinated controller. The gripper attitude is stabilized by the tether tension moment and thrust moments. Meanwhile, the approaching trajectory is tracked by tether tension and thrusts. 23 Considering the motion of the platform, an approach control scheme is studied by Meng and Huang, in which the tether tension, thrusters, and the reaction wheel are all utilized. 2 An attitude and orbit coupling controller is also proposed by Huang et al., in which an optimal open-loop controller is designed based on the hp-adaptive pseudospectral method to minimize the fuel consumption and a classical proportional-derivative (PD) controller is designed to generate the error corrections. 24 However, in the aforementioned literatures, dynamic parameters, including mass and moment of inertia, are assumed to be certain and known. Actually, after the capture of a noncooperative target, the combination consisted of the gripper and target is uncertain. The mass, the moment of inertia, and the position of tether junction are all unknown. In addition, thrusts and torques are limited by the gripper, and then saturation of thrusters may occur during the target retrieval, which may lead to the instability of the controller. In this article, these aforementioned problems are investigated and an adaptive anti-windup retrieval method is proposed.
This article is organized as follows: In section “In-plane retrieval dynamic model”, an in-plane retrieval model including orbit dynamics and attitude dynamics is derived via Lagrangian method. In section “Adaptive anti-windup retrieval method”, an adaptive anti-windup retrieval control method is designed. In section “Numerical simulation”, the feasibility of the retrieval control method is validated by numerical simulations and the results are analyzed. Final section gives the conclusion.
In-plane retrieval dynamic model
As shown in Figure 1, the gripper and the target satellite compose a combination after the capturing. Then, the combination is retrieved by the platform via the tether. For simplicity, the following assumptions are made in the dynamic modeling:
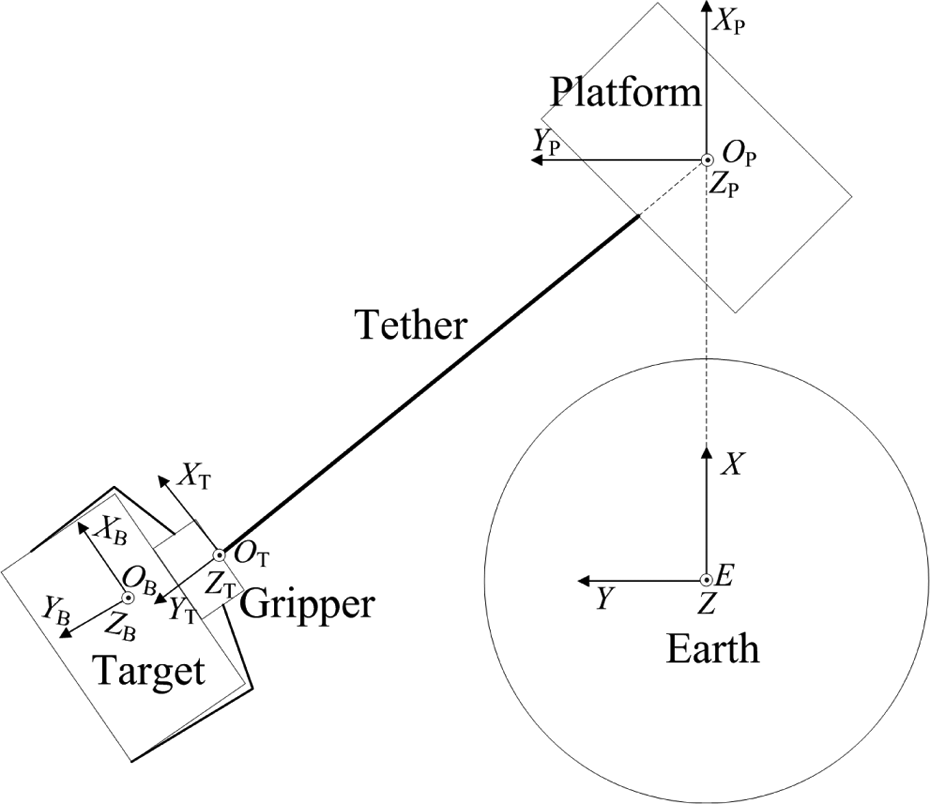
Retrieval of a noncooperative target after capturing by TSR. TSR: tethered space robot.
The platform moves along a circular Keplerian orbit and its mass is much bigger than the combination. The platform can be maintained during the retrieval phase by its own thrusters.
The inelastic and massless model of the tether is adopted.
EXYZ is the earth-centered inertial frame (ECIF) with its origin E located at the mass center of the earth. The platform in its orbit around the earth is defined by the radial coordinate R0, true anomaly γ, and orbital angular velocity ω. OPXPYPZP represents the platform orbit frame (POF) with its origin OP located at the centroid of the platform. The XP-axis is directed from the center of the earth E to OP, the YP-axis is perpendicular to the XP-axis and along the direction of orbital velocity, and ZP-axis completes the frame following the right-hand principle. OTXTYTZT represents the tether frame (TF) with its origin located at the junction of the tether and gripper. OBXBYBZB is the body frame (BF) with its origin located at the centroid of the combination. For simplicity, only the in-plane motion of the system is considered in this article. The X − Y plane is assumed to be the system orbit plane and the z-axis of ECIF, POF, TF, and BF are parallel to each other. Then, the coordinate systems OTXTYTZT and OBXBYBZB are obtained by rotating OPXPYPZP angles of α and ψ around ZP-axis, respectively.
The combination mass is m and its moment of inertia around OBZB in BF is IzB. The position of OT in OBXBYBZB is [dx,dy,0]. The orbital angular velocity ω is calculated by
The position vector of OB with respect to the mass center of the earth is

where
Then, the position vector

where

Then,

where
The kinetic energy of the combination is derived as
The potential energy of the combination is

Then, expanding it by Taylor’s series and ignoring forth and higher terms of 1/R0

Selecting

where





In this article, Qα is realized by thrusters on the gripper. Given the thrust F acts on the tether junction OT and the direction is perpendicular to the tether, Qα = Fl. Qψ is realized by reaction wheels or attitude control thrusters of the gripper.
Even if the dynamic model is complex and highly nonlinear, there are still some important properties in equation (7).
Property 1
The inertia matrix
Property 2
For
Given


where
Adaptive anti-windup retrieval method
For the retrieval of a noncooperative target by TSR, an adaptive anti-windup control method is studied in this section. Given unknown dynamic parameters of the combination, an adaptive dynamic inversion controller is proposed first. Then, auxiliary variables are designed to compensate the limited control inputs. Finally, a stability analysis is carried out and the stable region is derived.
Adaptive dynamic inversion control
The basic idea of the well-known dynamic inversion control theory is to seek a nonlinear feedback control law to cancel exactly all of the nonlinear terms. Then, the closed-loop system is linear and decoupled in the ideal case.
25
Assuming that

where
For unknown dynamic parameters, the controller (9) cannot be used in this article. Substituting these unknown parameters with their estimates, the following controller is derived

where
Setting

where
Assuming that

where λ is a positive design constant and
In equation (12),

where
Setting

The stability is analyzed as follows:
Choose the Lyapunov function as

Differentiating V with respect to time yields

Substituting the controller (13) and equation (14) into equation (16), we have

where
Selecting
Anti-windup auxiliary variables
The existence of input saturation can degrade the system control performance and even lead to the system instability. For this problem, Chen et al. used command filters to implement physical constraints on the virtual control laws.
26
Huang et al. and Xia et al. designed auxiliary variables and auxiliary systems in the presence of input saturation.
22,27
Wen et al. and Li et al. used the special property of a hyperbolic tangent function to deal with the input saturation.
28,29
In this article, an auxiliary variable

where
Inserting the auxiliary variable to the controller, the adaptive anti-windup controller (AAC) is rewritten as

where
Substituting the controller (18) into equation (8), we have

Stability analysis
Choose the Lyapunov function as

Differentiating V with respect to time yields

Substituting equations (17) to (19) into equation (21), we have
where

For
If the initial value of W2 is W0, then,

The entire retrieval control method of TSR is shown in Figure 2.

Adaptive anti-windup retrieval controller.
Numerical simulation
In this section, simulations of retrieval for a noncooperative target are conducted to illustrate the performance of the proposed controller first. Then, the proposed controller and an AC are compared.
Simulation of a representative retrieval
The orbit altitude of the platform is 700 km and the orbital angular velocity ω is 0.0011 rad/s. The control inputs of actuator satisfy
Initial and terminal values of parameters.

The desired tether length ld is derived by a cubic polynomial, which satisfies the initial and the terminal conditions in Table 1. The desired instructions of tether deflation and combination attitude are αd = 50° and ψd = 50°, respectively. The simulation results are shown in Figures 3 to 6
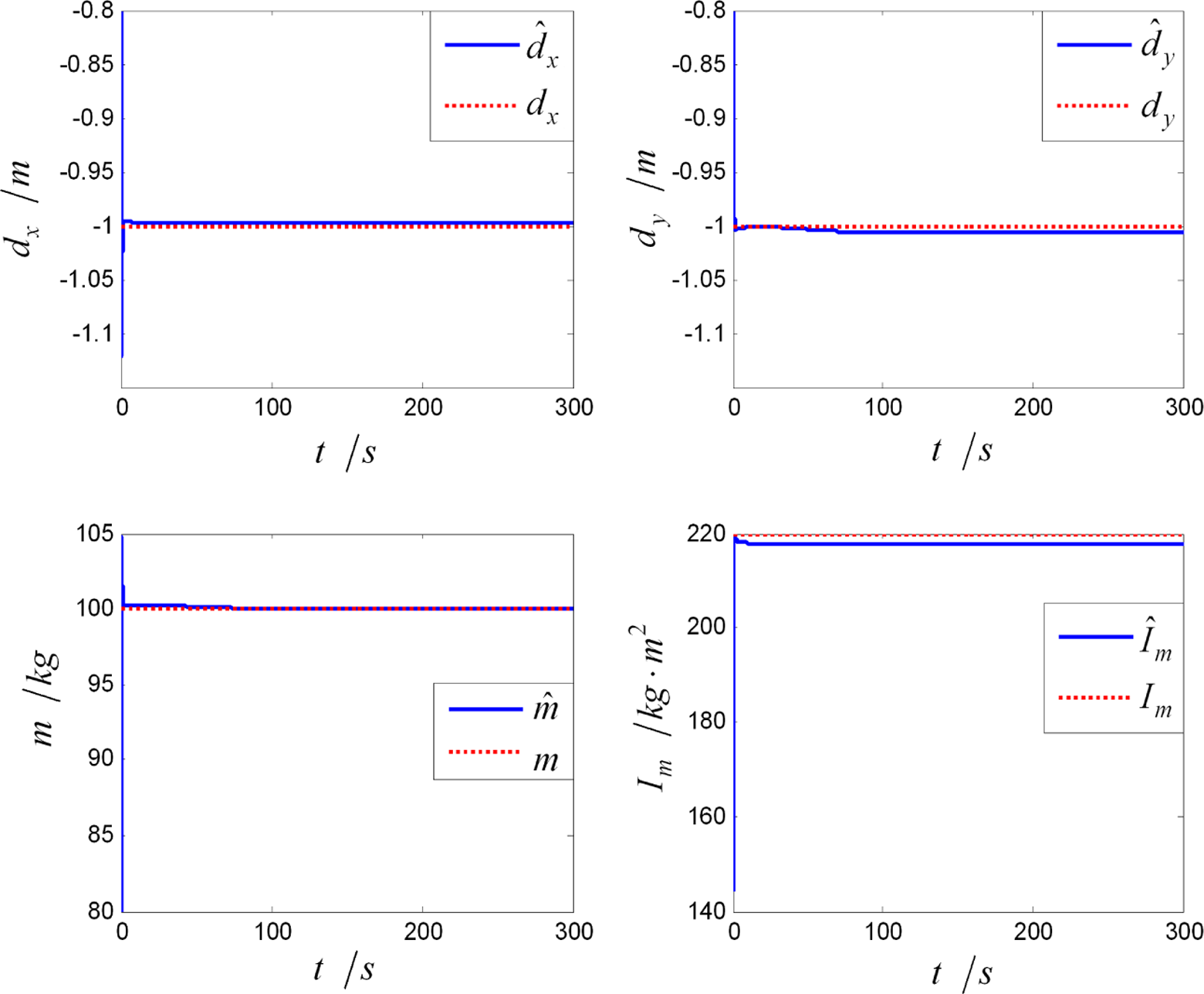
Dynamic parameter estimates.

Tether length during the retrieval.

In-plane angle during the retrieval.

Combination attitude during the retrieval.

Figure 3 shows the estimates of dynamic parameters, including dx, dy, m, and Im. They can converge to their actual values quickly. The identification errors of these four parameters are less than 2%.
The tether length, in-plane angle, and combination attitude during the retrieval are shown in Figures 4 to 6, respectively. Figure 4 demonstrates the change of the tether length. Using a cubic polynomial, the tether is desired to retrieve smoothly from 200 m to 10 m and satisfy the terminal condition at 300 s. The actual tether length tracks the desired tether length quickly and accurately. The terminal tether length error is less than 0.05 m. The terminal retrieval rate is less than 0.01 m/s. Figure 5 is the in-plane angle of the space tether. The controller can overcome the influences of the initial deflection. The actual in-plane angle α is converged from 40° to the desired value in about 120 s. The terminal angle error is less than 0.1° and the terminal angle rate is less than 0.05°/s. For the influence of the limited inputs, the convergence rate is slow and acceptable. Figure 6 represents the combination attitude. The actual combination attitude ψ is converged from 40° to the desired attitude in about 70 s. The terminal attitude error and attitude rate are less than 0.1° and 0.05°/s, respectively. We can see that under the designed controller, the target with unknown dynamic parameters can be retrieved by the limited control inputs of TSR.
Furthermore, when physical parameters
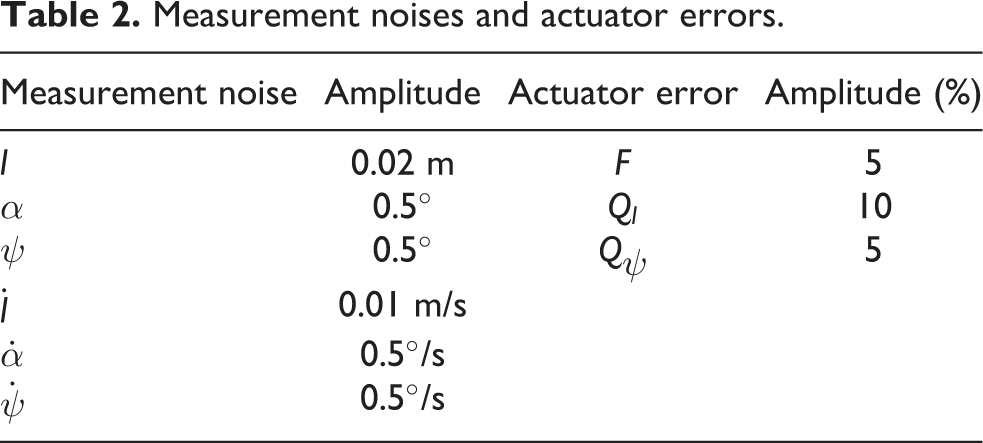
Measurement noises and actuator errors.
Numerical results are shown in Figures 7 to 9. Dispersions of tether lengths are shown in Figure 7. The actual tether length tracks the desired tether length accurately. The terminal tether length error is less than 0.2 m. The terminal retrieval rate is less than 0.03 m/s. Dispersions of in-plane angles are shown in Figure 8. The controller can overcome the influences of model uncertainties, and the actual in-plane angle is converged to the desired value in about 120 s. The terminal angle error is less than 2°. Figure 9 shows dispersions of combination attitudes. The maximal overshoot is less than 3° and the terminal attitude error is less than 2°. These simulation results validate that the retrieval control method is feasible and the noncooperative satellite is retrieved along the desired trajectory effectively. Furthermore, an interesting phenomenon is demonstrated in Figures 8 and 9. Tracking errors of in-plane angle and combination attitude become larger with time. It is quite plain after 200 s. The reason is analyzed as follows. The main inertia of the in-plane angle is ml2 and it becomes much smaller when the tether length becomes shorter. Then, influences of actuator errors are amplified. The combination attitude error becomes larger for the coupling of α and ψ.

Dispersions of tether lengths with the measurement noises and actuator errors.

Dispersions of in-plane angles with the measurement noises and actuator errors.

Dispersions of combination attitudes with the measurement noises and actuator errors.
Comparison with an AC
For the retrieval of a noncooperative target, the adaptive control is incontrovertibly required because of the unknown dynamic parameters. Then, the availability of the anti-windup strategy is verified by the comparison of the AAC (equation (18)) and the AC (equation (13)).
Ignoring measurement noises and actuator errors, the simulation results of AAC and AC with the same controller parameters are shown in Figures 10 to 13. Figure 10 represents the tether length. Under AC, the tether is retrieved smoothly and satisfies the terminal condition. The control performance is almost the same as that of AAC. Figure 11 represents the tether in-plane angles and Figure 12 represents the combination attitudes. AC can also overcome the influences of the initial errors and the initial angular velocity. The terminal control errors of both α and ψ are less than 0.1°. The convergence times are about 120 s and 70 s, respectively. However, the initial error of ψ is 10° and the maximum tracking error of AC is about 55°. By the anti-windup strategy, the maximum tracking error is about 10°, which is much smaller than AC. Figure 13 is the comparison of generalized forces between AAC and AC. AAC represents the actual generalized forces

Tether lengths under AAC and AC. AAC: adaptive anti-windup controller, AC: adaptive controller.
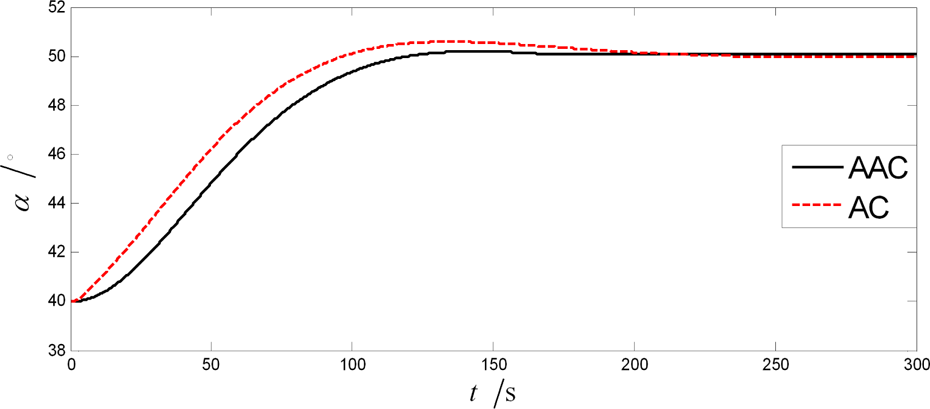
In-plane angles under AAC and AC. AAC: adaptive anti-windup controller, AC: adaptive controller.

Combination attitudes under AAC and AC. AAC: adaptive anti-windup controller, AC: adaptive controller.

Generalized forces under AAC and AC. AAC: adaptive anti-windup controller, AC: adaptive controller.
In addition, assumed measurement noises and actuator errors follow the Gaussian distribution and their amplitudes are shown in Table 2, 150 simulations are performed under AC. Unfortunately, most of the simulations are divergent. The first divergence state is the combination attitude. The main reason is the saturation of Qψ. For example, if Qψ satisfies
Conclusions
After a noncooperative satellite is captured by the TSR, TSR and the satellite compose a combination with uncertain mass, inertia, and tether junction position. For this retrieval problem, an adaptive anti-windup control method is proposed in this article. Simulation results verify the feasibility of this retrieval control method by a representative retrieval of TSR. Under the controller, the combination is retrieved along the designed trajectory and can overcome measurement noises, actuator errors, and disturbances of initial states. Compared with the adaptive control, the adaptive anti-windup control method can realize smaller control forces and better attitude tracking.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (Grant Nos 61005062 and 11272256) and the Fundamental Research Funds for the Central Universities (Grant No. 3102015BJ006).