
Abstract
The article deals with the issue of use of geometric mechanics tools in modelling nonholonomic systems. The introductory part of the article contains fiber bundle theory that we use at creating mathematical model of nonholonomic locomotion system with undulatory movement. Further the determination of general mathematical model for n-link snake-like robot is presented, where we used nonholonomic constraints. The relation between changes of shape and position variables was expressed using the local connection that was used to analyze and control system movement by vector fields. The effect of links number of snake-like robot on its mathematical model was investigated. The last part of this article consists of detailed description of modeling reconstruction equation for four- and five-link snake-like robot.
Introduction
Different methods of locomotion were studied separately, and most approaches in the analysis process and design relied on the specific characteristics of given locomotion system. However, despite their differences, most robots share common features. Most of the robots today use wheels and legs, but there are other classes of robots such as snake-like robots.
Imitation of snake-like locomotion in robotics is an important area of research with respect to high stability and good terrainability compared with wheeled and legged robots. Significant is also their robustness to mechanical failure due to high redundancy. Motion patterns of biological snakes therefore serve as a source of inspiration for snake-like locomotion. To be able to analyze and control these motion patterns, suitable mathematical models are need. In general, based on the observation of animal locomotion in nature such as walking of horses or swimming of fishes, it is possible to find out that the locomotion occurs due to change of body shape and its interaction with the environment. This fact is the basis for creating models of robot locomotion.
According to the study by Liljebäck et al.,
1
the research in area of snake-like robot locomotion modeling is focused on the following areas:
biomechanical studies of biological snakes; modeling and analysis of flat surface locomotion with sideslip constraints; modeling and analysis of flat surface locomotion without sideslip constraints; modeling and analysis of robotic fish and eel-like mechanisms; and modeling and analysis of locomotion in environments with obstacles.
Our article deals with area no. 2 in which the principle of modeling is based on the assumption that snake body cannot perform a lateral movement, it follows that, it is necessary to substitute nonholonomic constraints first kind to motion equations of snake-like robot. In real model of robot, we obtain given nonholonomic constraints using wheels. In biological snake, this fact is explained by anisotropy of skin friction and surface irregularity on which the snake moves. 2
Unfortunately, introducing nonholonomic constraints to conventional methods such as Newton—Euler equations or Lagrange equations is quite problematic. In the last 30 years, in the context of rapid developments of differential geometry and global analysis and their application to mechanics, this topic has been intensively studied and new mathematical models to deal with nonholonomic systems had been invented. 3
For creating model of locomotion we inspired by works by Shapere and Wilczek, 4 Murray and Sastry, 5 Kelly and Murray, 6 and Ostrowski, 7 in which authors tried to research basic mathematical structures that are common for all locomotion systems. These research studies have led to the general principle of locomotion that says if certain variables in locomotion system change periodically, movement of the whole locomotion system occurs. The mathematical object, which describes effectively this phenomenon, is called connection, which is object used in theoretical physics. A key result of this approach is reconstruction equation for nonholonomic systems, which gives to correlation local velocity of locomotion system and velocity of changes its internal shape for broad group of locomotion systems. The classical treatment of multibody systems dynamics provides length and complicated equations of motion and these equations are often not suitable for control analysis and design. Geometric mechanics offers a powerful tool for formulating equations of motion and understanding important properties of their dynamics.
Although now foundations of the theory of nonholonomic locomotion systems are quite well established, there is still a lack of solved models of locomotion systems appearing in robotics. In this article, we use mathematical framework connection and established techniques from geometric mechanics to derive the reconstruction equation for four- and five-link planar snake-like robot moving on planar surface.
The fiber bundle theory
The research studies concerning application of unconventional locomotion of technical systems were always inspired by nature. We can state that animal locomotion in homogeneous environment is based on periodic change in their internal shape, by which displacement occurs in their body. This displacement in their body can be mathematically determined by element of Lie group, for example, SE (2) for the movement in plane and this group is typically represented as a homogenous matrix: SE(2).

We are able to express the total body movement based on the relation between shape variables and external constraint forces that arise through the interactions of animal with its environment. One type of movement that works on the mentioned principle is called undulatory locomotion. Although this is a relatively primitive and simple movement, it can be significantly robust. Not surprising, that is used across the entire biological spectrum from moving bacteria to reptiles.
According to definition of undulatory locomotion is the process that generates displacements of locomotion system via a coupling of internal deformations to an interaction between the robot and its environment. As from this definition implies, generally undulatory locomotion requires some form of interaction with environment, which we will model as a constraint. These constraints can have several forms, such as:
viscous friction; rolling of wheels without slipping; and interaction of surface with a viscous liquid or air.
Although constraint forces do not perform mechanical work, that is, they do not supply the energy to system, they allow to convert energy generated by shape variables to the kinetic energy of group variables.
With the examples of undulatory locomotion, we can include worms, snakes, amoeba, and fish. In this article, we restrict interactions between the robot and its environment on nonholonomic kinematic constraints. This constraint allows us to model large group of systems and it leads to good structures. 8
As we already know animal locomotion is produced by the shape change of body and its reaction with the environment. A gait decides about the locomotion, which can be described by kinematics, as it is shown in Figure 1. According to definition, the gait is a continuous closed curve φ in the base space M, that is 9 :


The scheme of using of kinematics and dynamics at control the locomotion system.
Thus the gait is periodic and so after each period of time τ, the system returns to the same point in the base space and in each cycle has the same shape. ϕ is the smooth map of real interval on a manifold M. We will assume that all base variables are fully actuated, that is, we can independently control each of the base configuration variables and also we assume that the base variables represent the ideal source of velocity.
The effect of environmental constraint force on locomotion can be described with dynamics. If we have given gait for locomotion system and the environmental constraint force, then we can calculate the torques of actuators through the inverse dynamics and we can control these torques to adjust the side constraint force based on the inverse dynamics.
Using fiber bundle theory, we obtain reduced dynamic equations. The modeling process based on fiber bundle theory is shown in Figure 2. 10

Modelling process based on fiber bundle theory. Q is the bundle manifold, G is the structure group, M is the base manifold and (φ1, φ2, …) is the joint angles.
The principle fiber bundle Q represents the configuration space of locomotion system. Given that the locomotion group is SE and is also a Lie group, it responds to the structure group G of the principle bundle. Then we have enough nonholonomic constraints that can be used to construct the connection of the fiber bundle which responds to the kinematics of locomotion system. Using the redundant nonholonomic constraints, we can reduce the dynamics from the shape space to the gait space and finally we get the optimal torques by minimizing the constraint force. 10,11
When we work with mechanical systems, we will assume the existence of Lagrangian function L(q,

where τi is the force function. When we have k constraints, we can write their as set k vector-valued equations

This group of constraints includes the most frequently investigated nonholonomic constraints. The constraints can be incorporated into the dynamics using Lagrange multipliers. That is, the equation (2) is modified by adding the constraint of force with unknown multiplier λ

Although we use Lagrange multipliers to eliminate the constraints for obtaining the dynamic description of systems, it was found out that fiber bundle theory is quite useful. In the presence of symmetries, we can rewrite the equations of motion into the following form



The reconstruction equation (5) and the momentum equation (6) represent set of l first-order differential equations, where l is dimension of the fiber space G. The reduced base dynamic equation (7) is set of m second-order differential equations, where m is dimension of the base space M. Thus, we reduce original set of n = (m + l) second-order dynamic equation of motion obtained from equation (4) to set of 2l first-order differential equations and m second-order differential equations. 7,12
Individual equations (5), (6), and (7) are shown using block diagram in Figure 3.

Representation of reduced base dynamic equation, reconstruction equation, momentum equation and their relation expressed using block diagram.
Snake-like robot models
In the following sections, we will show how to build a mathematical model of n-link kinematic snake. Then we will discuss the case of four- and five-link snake and we will consider the situation when the base variables represent the ideal source of velocity.
N-Link kinematic snake
The undulatory locomotion of the n-link kinematic snake will be provided by modifying the angle size α1, … , αn-1, where the wheel axes are rigidly held perpendicular to the links (Figure 4). The position and orientation of kinematic snake is represented in the plane by the three fiber variables (x, y, θ) ∊ SE (2), and its configuration space is

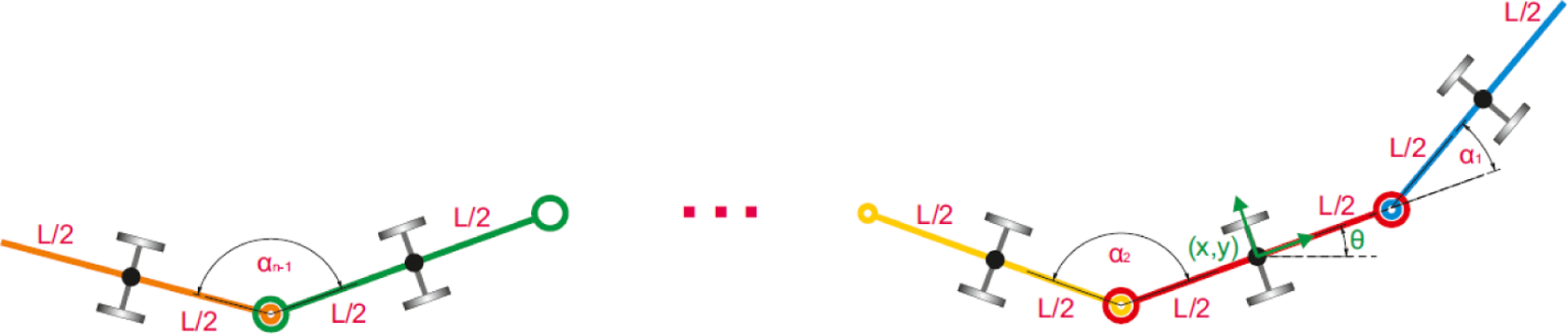
The simplified scheme of n-link kinematic snake.
The n-link kinematic snake has three degrees of freedom given by variables (x, y, θ) and n − 1 shape variables α1, …, αn−1, while we have only two independent variables α1, α2, and α3, …, αn−1, we obtain by combination of variables α1 and α2. This means, that n-link kinematic snake belongs to under-actuated nonholonomic mechanical systems first order.
This n-link kinematic snake belongs to the category of principally kinematic systems, where to build the reconstruction equation fully suffice nonholonomic constraints (Figure 5). For this type of snake, we have n nonholonomic constraints and thus we get n equations, while the fourth to the nth equation represents only the dependence between shape variables.

Scheme representing mathematical model of principally kinematic systems.
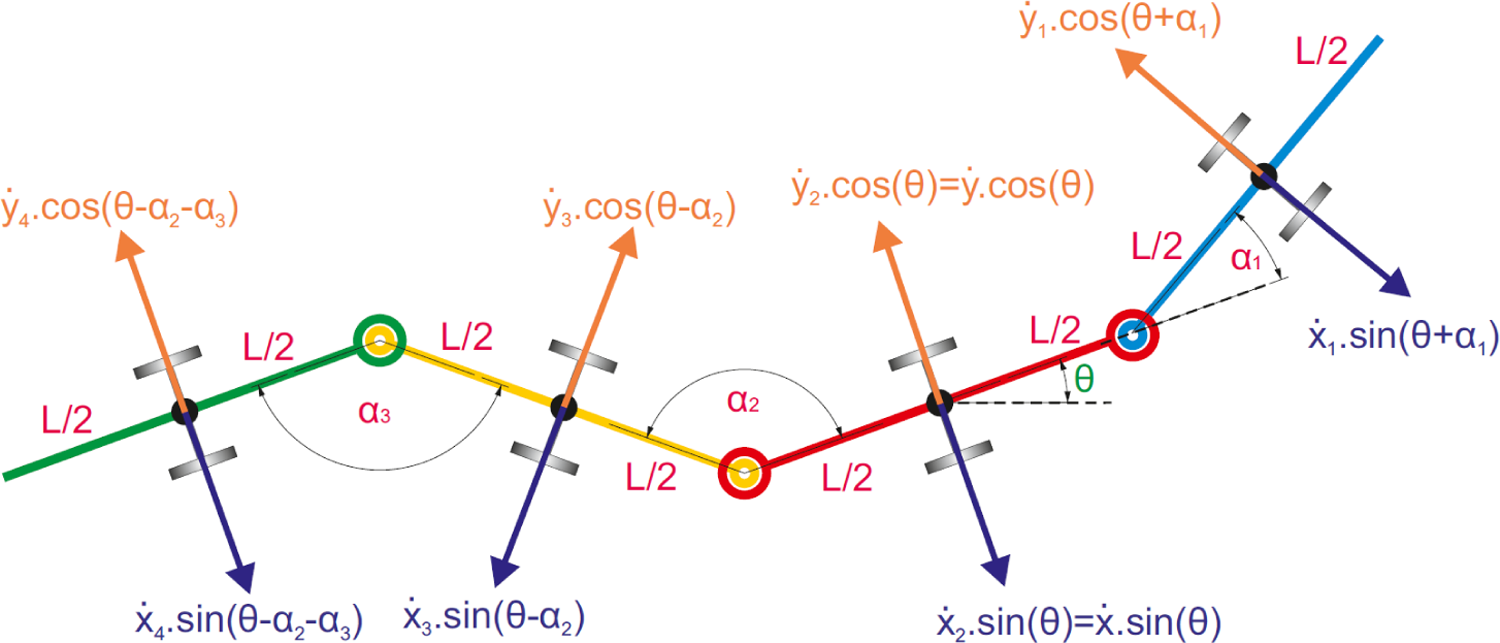
For creating the mathematical model–reconstruction equation, we will use the approach where we work with nonholonomic constraints expressed in world coordinates (Figure 6). For n-link kinematic snake, we have n nonholonomic constraints and we will express constraints for the first five links and for ith link with respect to coordinates x and y




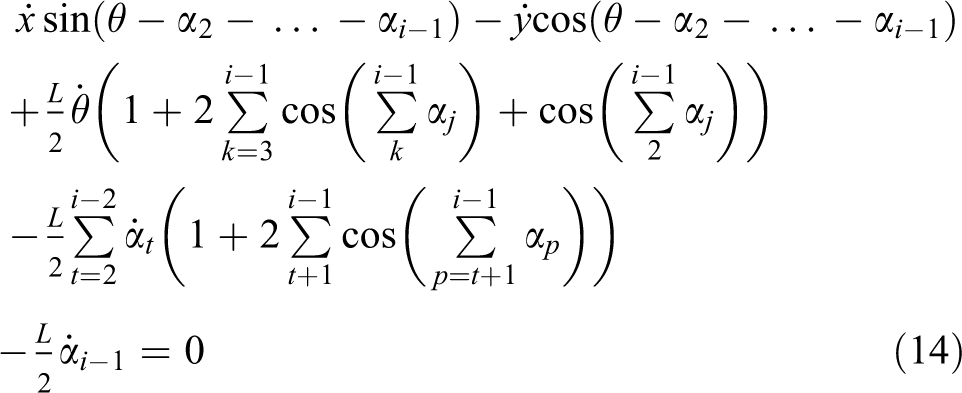
Equation (8) represents a general notation of nonholonomic constraint for ith link and we have been able to determine this shape of constraint after determining five constraints.

Nonholonomic constraints in world variables.
Now we rewrite nonholonomic constraints to Pfaffian form with the use of substitution, where by using r1, we will mark the first two shape variables α1 and α2 and using r2 other shape variables α3, …, αn−1 10:

Then we state the general form of the reconstruction equation using local coordinates

If we want to obtain the reconstruction equation expressed using world coordinates, we will use the following relation

using which we transform the body velocity to the world velocity

Four- and five-link kinematic snake
In this part, we will show the creation of reconstruction equation for four- and five-link kinematic snake.
The undulatory locomotion of the four-link kinematic snake will be provided by modifying the angle size α1, α2, and α3 (Figure 7). The position and orientation of kinematic snake is represented in the plane by the three fiber variables (x, y, θ) ∊ SE and its configuration space is

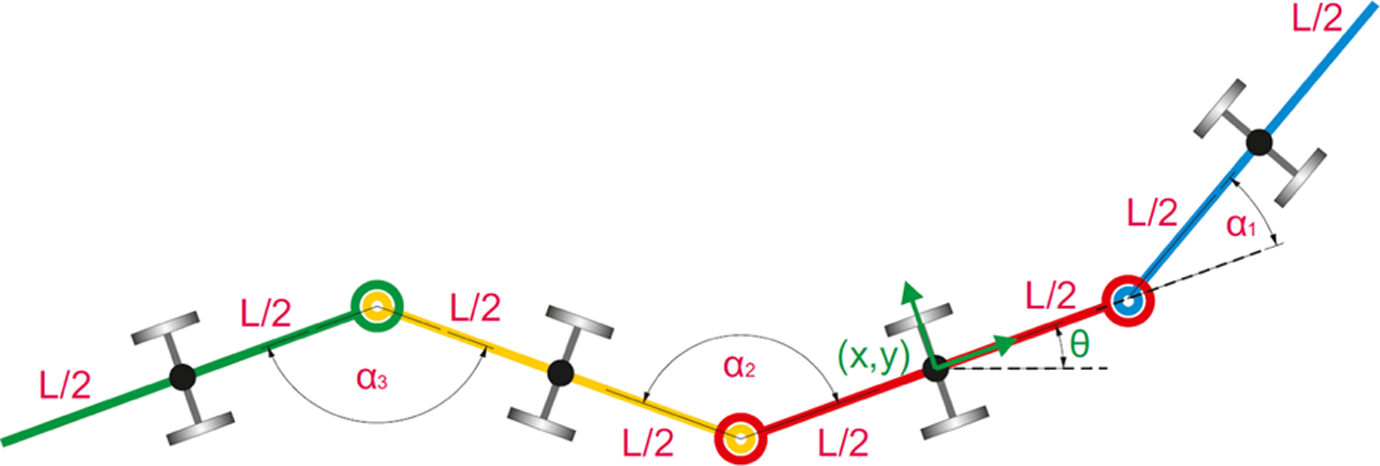
The simplified scheme of four-link kinematic snake.
The four-link kinematic snake has three degrees of freedom given by variables (x, y, θ) and three shape variables α1, α2, and α3, while we have only two independent variables α1, α2, and α3, we obtain by combination of variables α1 and α2. This means, that the four-link snake-like robot belongs to under-actuated nonholonomic mechanical systems first order.
The four-link kinematic snake belongs to the category of principally kinematic systems, where to build the reconstruction equation fully suffice nonholonomic constraints. For this type of snake, we have four nonholonomic constraints—equations (9) to (12) (Figure 8).
Nonholonomic constraints in world variables.
Nonholonomic constraints, equations (3) to (6), we express in Pfaffian form
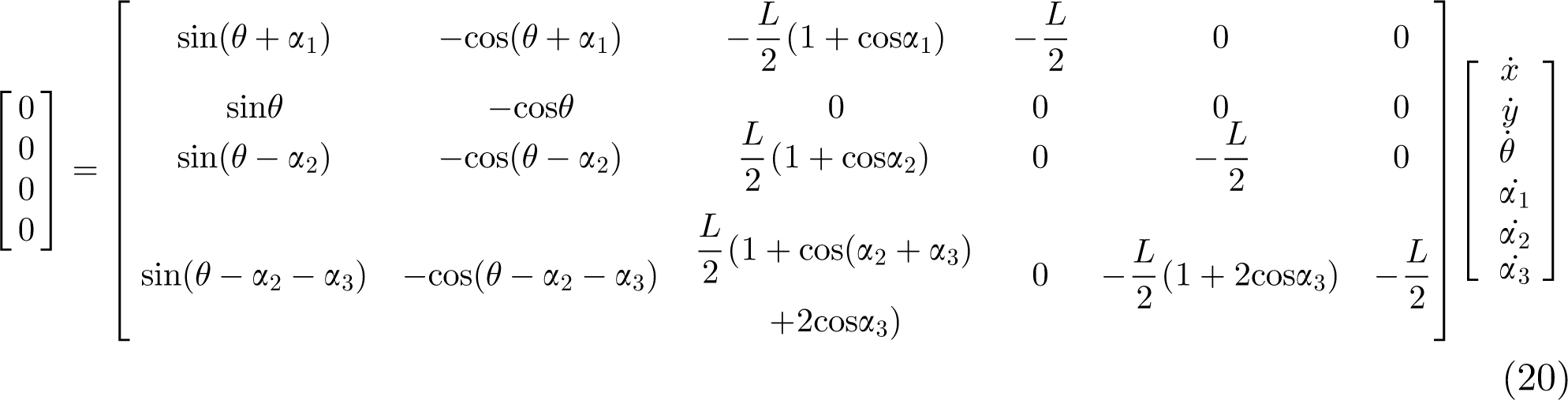
After multiplying the previous equation and separating group from shape variables, we obtain the reconstruction equation in the form

where

As mentioned earlier, the last equation expresses only dependence shape variable α3 on α1 and α2.
The serpentine movement of four-kinematic snake simulated in program SolidWorks2015 during one period (2π s) is shown in Figure 9, where shape variables change according to equation

and dependence of these shape variables represents gait.
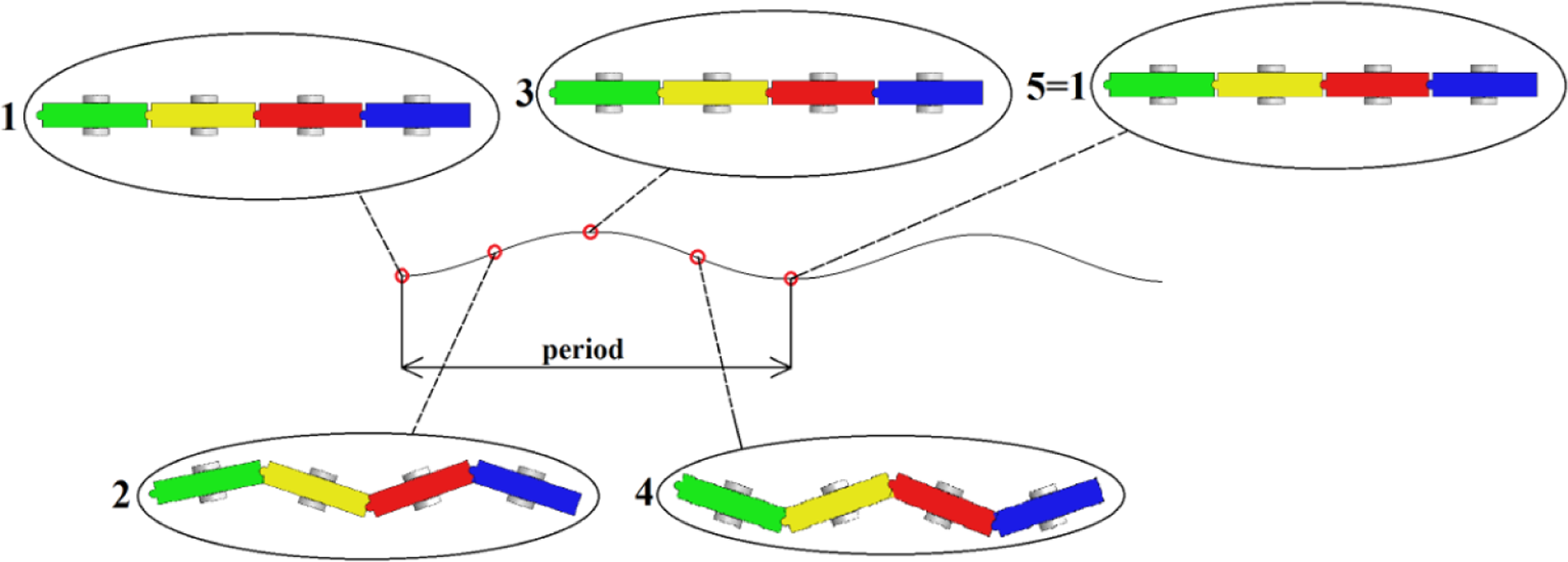
Serpentine movement of four-link kinematic snake with shown trajectory of the mass center.
The travelled distance of snake at serpentine movement during one period is 27.23 mm.
The undulatory locomotion of the five-link kinematic snake will be provided by modifying the angle size α1, α2, α3, and α4 (Figure 10). The position and orientation of kinematic snake is represented in the plane by the three fiber variables (x, y, θ) ∊ SE and its configuration space is


The simplified scheme of five-link kinematic snake.
This five-link kinematic snake has three degrees of freedom given by variables (x, y, θ) and four-shape variables α1, α2, α3, and α4, while we have only two independent variables α1, α2, and α3, α4, we obtain by combination of variables α1 and α2. This means that the five-link snake-like robot belongs to under-actuated nonholonomic mechanical systems first order.
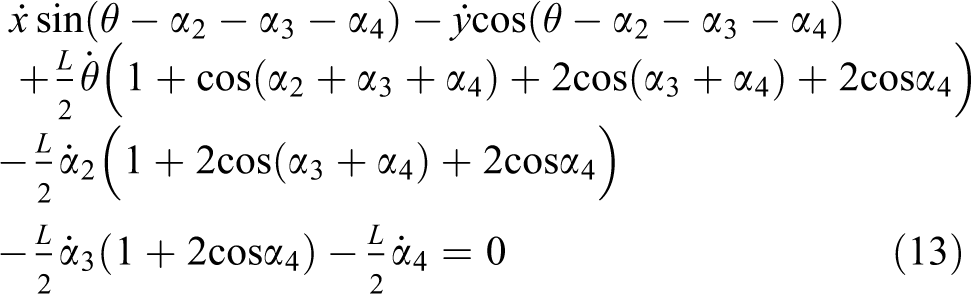
The five-link kinematic snake belongs to the category of principally kinematic systems, where to build the reconstruction equation fully suffice nonholonomic constraints. For this type of snake, we have five nonholonomic constraints—equations (9) to (13) (Figure 11).

Nonholonomic constraints in world variables.
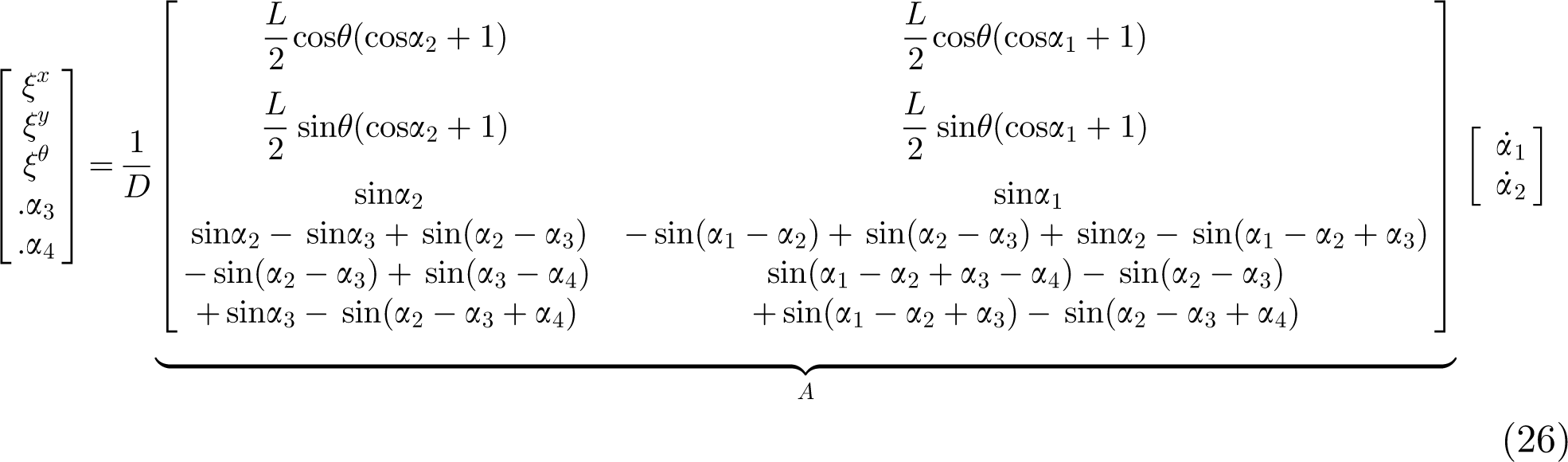
After modifying nonholonomic constraints and separating group from shape variables, we obtain the reconstruction equation in the form
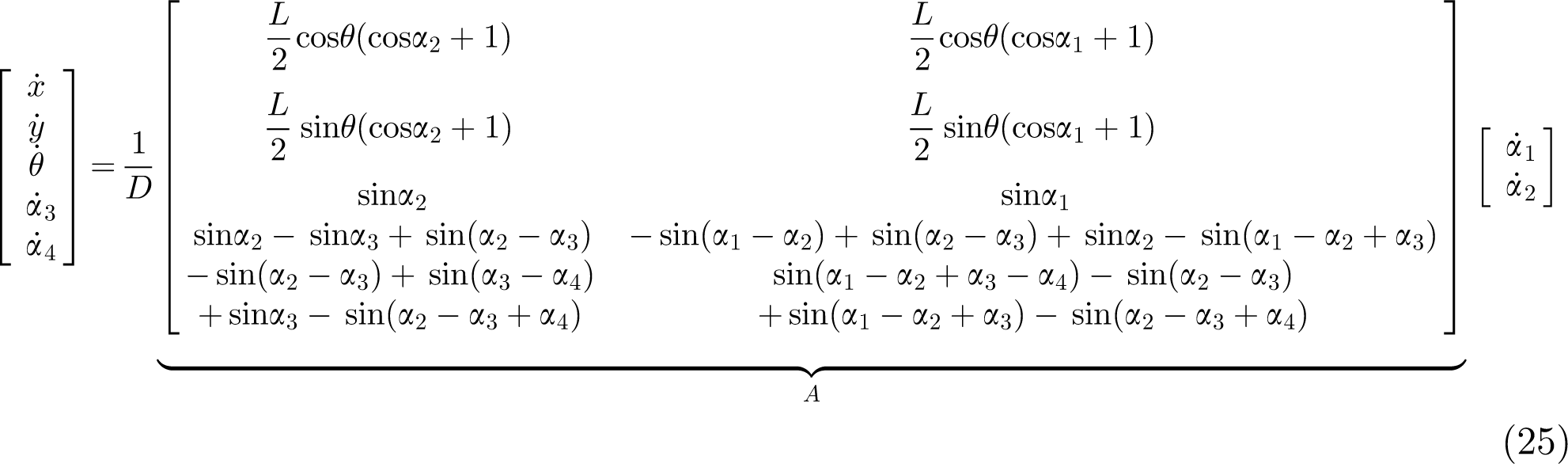
where
The serpentine movement of five-kinematic snake simulated in program SolidWorks2015 during one period (2π s) is shown in Figure 12, where shape variables change according to equation (23).

Serpentine movement of five-link kinematic snake with shown trajectory of the mass center.
The travelled distance of snake at serpentine movement during one period is 25.65 mm.
As we could notice, upon increasing the number of links, we always get the same structure of reconstruction equation. The addition of links leads to decrease in traveled distance during one period, because we have only two control variables—shape variables and other shape variables only follow control variables and do not perform any work.
Conclusion
The aim of this article was to introduce the use the geometric mechanics at modeling nonholonomic locomotion systems. At first we discussed about modeling process based on the fiber bundle theory that we used to create mathematical model of locomotion systems. We deduced mathematical model that is called as reconstruction equation in general form for n-link snake-like robot. The detailed process of creating reconstruction equation was presented on the four- and five-link snake. The main advantage of forming these created reconstruction equations is existence of connection. Individual components of connection we can show using vector fields and then we can analyse the shape of vector fields to the shape of gait by which we obtain the ability to predict how designed locomotion system will move in the plane.
Footnotes
Acknowledgements
The work has been accomplished under the research projects No. VEGA 1/0872/16 “Research of synthetic and biological inspired locomotion of mechatronic systems in rugged terrain” and the grant project Tatra bank: DidacticBot—“Innovation of educational process of robotics and mechatronics.”
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.