
Abstract
The nonstationary transition status of the motor start-up phase creates great threat against the stable operation of the flexible manipulator system. This article investigates the electromechanical coupling dynamics and vibration response characteristics for a flexible manipulator of an alternating current servomotor-driven linear positioning platform with considering the start-up dynamic characteristics of the motor. Based on the constructed global electromechanical coupling effect and the Lagrange–Maxwell equations, the dynamic model of the whole system is established. The electromechanical coupling vibration mechanism of the flexible manipulator is obtained by analyzing the multiphysical process and multiparameter coupling phenomenon of the whole system. The result demonstrates that the nonstationary transition status of the motor initialization phase is mainly manifested during the disturbance of the three-phase stator current. As the speed of the linear positioning platform increases, the current disturbance, arousing the change of the servo driving force of the linear positioning platform, has dominant frequency shift and frequency amplitude decrease. Then, the vibration response of the flexible manipulator is markedly affected and the variation of the high-order modes vibration response is more obvious. The analysis result is significant for improving the dynamic performance of the motor-driven flexible robot manipulator system.
Keywords
Introduction
As the modern robot technology is developing to lower energy consumption, higher speed, and higher precision, there has been increasing attention on the flexible manipulator. 1 –4 Compared with the rigid manipulator, the flexible manipulator has many advantages such as lower energy consumption, higher load weight ratio, and higher speed. Thus, it has been widely adopted in precision assembly, 5 space equipment, 6 and modern manufacturing processes. 7,8 However, owing to the feeble rigidity and heavy deflection, the flexible manipulator exhibits a long elastic vibration in rapid positioning, which seriously impacts the positioning speed and accurate tracking ability of the whole system. Therefore, the vibration mechanism and control strategy of the flexible manipulator have always been a quite focused issue. 9 –11
Before a reasonable and effective active vibration control algorithm is designed, the vibration mechanism of the flexible manipulator system should be obtained first. Most of the existing investigations focus on the effect of the parameters of the flexible manipulator itself on its dynamic characteristics. Coleman and McSweeney derived the eigenspectrum and eigenfunctions and investigated the behavior of the spectrum of a flexible manipulator while the base movement was described as zero-disturbance. 12 In the study by Qiu, 13 the vibration control of a Cartesian flexible manipulator was studied by ignoring the interference of the base. Abe 14 suppressed the vibration of a flexible Cartesian robot manipulator through planning the trajectory of its base while the exact mathematical model was aim to the flexible manipulator itself. However, the flexible manipulator system is mainly made up of the base driving devices and the upper flexible actuators. 15 –17 Due to the fluctuation of motor electromagnetic parameters and the structural inertia, it is very difficult to move with strict uniform velocity or constant axial force for the driving system, especially when the motion state changes.
With the base’s ripple components of the transmission speed or the axial force considered, the lateral movement of the flexible manipulator is likely to present complicated dynamical characteristics, and large amplitude vibration appears, which is caused by the parametric excitation vibration. 18,19 Therefore, it is very important to consider the effect of the base’s dynamic characteristics on the vibration characteristics of the flexible manipulator system. In the study by Pratiher and Dwivedy, 20 the influence of base excitation on the steady-state response of the flexible manipulator was studied by describing the interference of the base as harmonic excitation. Dwivedy and Kar investigated the nonlinear dynamic characteristics of a parametrically excited cantilever beam, the base of which was under harmonic excitation. 21 Liu studied the vibration response of a flexible manipulator which was driven by a moving base and confirmed that the rigid base, with its motion disturbances, had a significant influence on the vibration response. 22 Moreover, in order to satisfy the system’s requirements of high accuracy, high-speed performance, and strong adaptability, the alternating current (AC) servomotors are often adopted for the base driving devices of the flexible robot manipulator. Li studied the nonlinear dynamic characteristics of a linkage mechanism system, which was driven by a three-phase AC motor and indicated that the electromagnetic parameters had significant effects on the linkage mechanism system. 23 In another study, with the inconstant speed of the direct current (DC) motor considered, the dynamic response of a motor–gear mechanism system was analyzed. 24 For the motor-driven flexible manipulator system, the dynamic performance of the base is to a great extent determined by the output characteristic of the motor. However, the motor’s output is not ideally constant, but fluctuation exists, especially at the start-up stage. The motion fluctuation will further affect the vibration characteristics of the flexible robot manipulator. In addition, there are few reports on the special vibration characteristics of the flexible robot manipulator under the disturbance stimuli of special driving equipment. Besides, the relationship between the disturbance stimuli and the movement characteristics should be further studied. Therefore, in order to accurately analyze the vibration characteristics of the flexible manipulator and apply effective vibration control, the motion fluctuations of the motor should be taken into consideration.
Fortunately, based on the analysis dynamics theory of electromechanical system and Lagrange–Maxwell equations, the global coupling dynamic model of the AC servomotor-driven flexible manipulator is constructed in this article. Then, the electromechanical coupling between the AC servomotor and the flexible manipulator is intensively studied to demonstrate the global electromechanical coupling relationship diagram of the flexible manipulator of an AC servomotor-driven linear positioning platform. Furthermore, under the direct coupling of electromagnetic torque, the electromechanical coupling vibration characteristics of the flexible manipulator are investigated.
The structure of this article is organized as follows: The section “Electromechanical coupling dynamic modeling” describes the electromechanical coupling dynamic model of the flexible manipulator of an AC servomotor-driven linear positioning platform. In the section “Decoupling analysis of the electromechanical coupling vibration”, the decoupling analysis for the electromechanical coupling dynamic model is exhibited and the motor parameters, which have main influence on the elastic vibrations of the flexible manipulator, are provided. Then, a simulative example is introduced in the section ‘Simulation examples’ and the specific relationship between the motor parameters and the vibration response of the flexible manipulator is presented. The section ‘Conclusions’ concludes this study.
Electromechanical coupling dynamic modeling
The flexible manipulator system of a linear positioning platform, driven by an AC servomotor, is a complex electromechanical system that includes motor subsystem, transmission subsystem, control subsystem, and perform subsystem. For its dynamics characteristics, the flexible manipulator is affected not only by its own structure parameters but also by other coupling subsystems. Therefore, the global electromechanical coupling relationship diagram, which is shown in Figure 1, should be revealed to analyze the specific coupling form of the AC servomotor-driven translational flexible manipulator.

Global electromechanical coupling relationship diagram of the AC servomotor-driven translational flexible manipulator. AC: alternating current.
Owing to the fact that the motor subsystem is the direct driving source of the whole system, the direct coupling of electromagnetic torque, which is the basic form of the electromechanical coupling, is analyzed in this article. A schematic diagram of an AC servomotor-driven translational flexible manipulator is shown in Figure 2. The slider, which is rigidly connected to the flexible manipulator by bolts, is driven by an AC servomotor and a ball screw. During the modeling process, assumptions are made as follows: (1) the influences of temperature and frequency on the motor parameters are neglected; (2) the motor air gap is uniform; (3) the self-inductance and mutual-inductance among the motor three-phase windings are assumed as constants; (4) the flexible manipulator is simplified as an Euler–Bernoulli beam by neglecting the impact of shear and axial deformation; and (5) the influence of gravity is ignored.

Schematic diagram of an AC servomotor-driven translational flexible manipulator. AC: alternating current.
The electromechanical coupling dynamic models of the AC servomotor-driven translational flexible manipulator are constructed by Lagrange–Maxwell equations which can be expressed as

where Tmech is the kinetic energy of the AC servomotor-driven translational flexible manipulator system, U is the elastic potential energy of the flexible manipulator, and Wm denotes the magnetic field energy of the AC servomotor.
Assuming that the AC servomotor-driven translational flexible manipulator system has N degrees of freedom, its Lagrange–Maxwell equations can be given as 25

where Qm denotes generalized force that corresponds to generalized coordinates qm and Fh is the dissipation function of the whole system. 1. The whole kinetic energy of the AC servomotor-driven translational flexible manipulator system includes four parts: the motor shaft, the screw, the solider, and the flexible manipulator. Besides, the kinetic energy of the screw and the solider can be equaled to the motor shaft and the equivalent rotary inertia of the motor shaft can be written as
where Jd is the rotary inertia of the motor shaft, W is the quality of the solider, and M, D, and P are the quality, diameter, and lead of the screw, respectively.

As a consequence, the kinetic energy of the AC servomotor-driven translational flexible manipulator system can be represented as:

where θ signifies the motor angle, s(x, t) is the transverse vibration displacement of the flexible manipulator, and L, ρ, and A are the length, density, and cross-sectional area of the flexible manipulator, respectively.
2. The AC servomotor is chosen as a permanent magnet synchronous AC servomotor (PMSM) due to its good low-speed characteristics and excellent speed control performance. Then, the magnetic energy, caused by the stator current itself as well as the interaction of the stator current and the flux linkage of the permanent magnet rotor, constitutes the whole magnetic field energy of the motor and can be expressed as

where iA, iB, and iC indicate the current of the three-phase stator, LA, LB, and LC are the self-inductance of the three-phase windings, H is the mutual-inductance, and ψf is the flux linkage of the permanent magnet rotor.
3. The elastic potential energy of the flexible manipulator can be represented as

where E and I are the elastic modulus and moment of inertia of the flexible manipulator, respectively.
4. The dissipation function of the whole system includes the heat dissipation of the motor resistance and the rotation resistance dissipation of the motor rotor which is given as

where RA, RB, and RC are the resistance of the motor three-phase windings and Rn is the rotation resistance coefficient of the motor rotor.
5. For the electromagnetic system, the nonconservative force is the input voltages of the three-phase stator. Additionally, for the mechanical system, the nonconservative force is the frictional resistance between the slider and the guide rail and can be expressed as

where υc is the friction coefficient between the slider and the guide rail.
By substituting equations (4) to (6) into equation (1), the Lagrange–Maxwell operator can be written as

The generalized coordinates include: the three-phase stator charge (eA, eB, eC) of the PMSM, the motor angle (θ), and the transverse vibration displacement of the flexible manipulator (

Thus, the voltage equation of A stator winding can be written as

Similarly, the voltage equations of B and C stator winding are deduced to


For the mechanical system, when the generalized coordinate is the motor angle (
Then, the torque equation of the mechanical system can be represented as
When the generalized coordinate is the transverse vibration displacement of the flexible manipulator (

Then, the vibration equation can be expressed as

Combining equations (11) to (13), (15), and (17), the electromechanical coupling dynamic models of the flexible manipulator of an AC servomotor-driven linear positioning platform are attainable and can be expressed as

From equation (18), it is obvious that the electromechanical coupling performance between the driving current of the PMSM and the transverse vibration displacement of the flexible manipulator is strong.
Decoupling analysis of the electromechanical coupling vibration
Using the assumed mode method, the transverse vibration of the flexible manipulator is given by

where
Substituting equation (19) into equations (15) and (17) leads to:


According to the structural mechanics, equation (21) can be translated into

where λk is the k-th natural frequency of the flexible manipulator.
In accordance with the orthogonality of the modal shapes, equation (22) can be further simplified as

Because only the first several order modes play a leading role in the vibrations of the flexible manipulator, only the first four order modes are taken into consideration. By defining


According to equation (18), the PMSM models are of strong coupling and nonlinearity, which is the reason why the traditional control strategies have heavy difficulty and challenges in the realization of high-performance speed regulation for the PMSM. Therefore, under the condition of the production of same magnetomotive force, the coordinate transformation is often adopted to equal three-phase AC windings to two-phase DC windings. Then, the PMSM, whose models are simplified and some variables are decoupled, can obtain good static and dynamic properties as DC adjustable speed system.
The Clarke transformation and Park transformation are essential for the three-phase AC windings transforming to two-phase DC windings. The constant power transformation is adopted and the synthetic transformation matrix can be derived as

Using the coordinate transformation for the PMSM models in equation (18), the stator voltage equations of the PMSM can be deduced as

where ud and uq are the dq axis components of the stator voltage, ω is the speed of the PMSM, and id and iq are the dq axis components of the stator current. Combining equations (24) to (27), equation (18) can be further decoupled as

From the previous analysis, the partial decoupling model of the flexible manipulator of an AC servomotor-driven linear positioning platform is obtained. The quadrature axis current (iq), which couples with the vibration modal coordinates of the flexible manipulator, can synthetically reflect the influence of the dynamic behavior of the PMSM on the electromechanical coupling vibration characteristics of the flexible manipulator.
Simulation examples
Because there are eight degrees of freedom in the global coupling dynamic models of the AC servomotor-driven flexible manipulator, of which mechanism and electromagnetism parameters are shown in Table 1, the numerical method is adopted to solve the models. In the simulation experiments, the tip vibrations of the flexible manipulator are analyzed.
Main mechanism and electromagnetism parameters of the AC servomotor-driven flexible manipulator.

According to the speed formula of synchronous motor (ω = 60f/p), when the frequency of the input voltages is 50 Hz, the theoretical value of the output speed of the PMSM is 750 r min−1. Then, the simulation value of the output speed, whichis also 750 r min−1, is shown in Figure 3. Thus, the accuracy of the model is verified.

Speed of the PMSM (f = 50 Hz). AC: alternating current; PMSM: permanent magnet synchronous AC servomotor.
In the start-up phase, the three-phase stator current of the PMSM and the quadrature axis current, which is obtained by coordinate transforming from the three-phase stator current, are shown in Figure 4. It is found that the three-phase stator current oscillates for some time before getting to steady state. Correspondingly, before the quadrature axis current reaches the steady values, there is also an oscillation process which is bound to affect the servo driving force of the linear positioning platform and subsequently influence the dynamic behavior of the flexible manipulator. Thus, it is very important to consider the effect of the start-up dynamic characteristics of the PMSM on the vibration characteristics of the flexible manipulator.
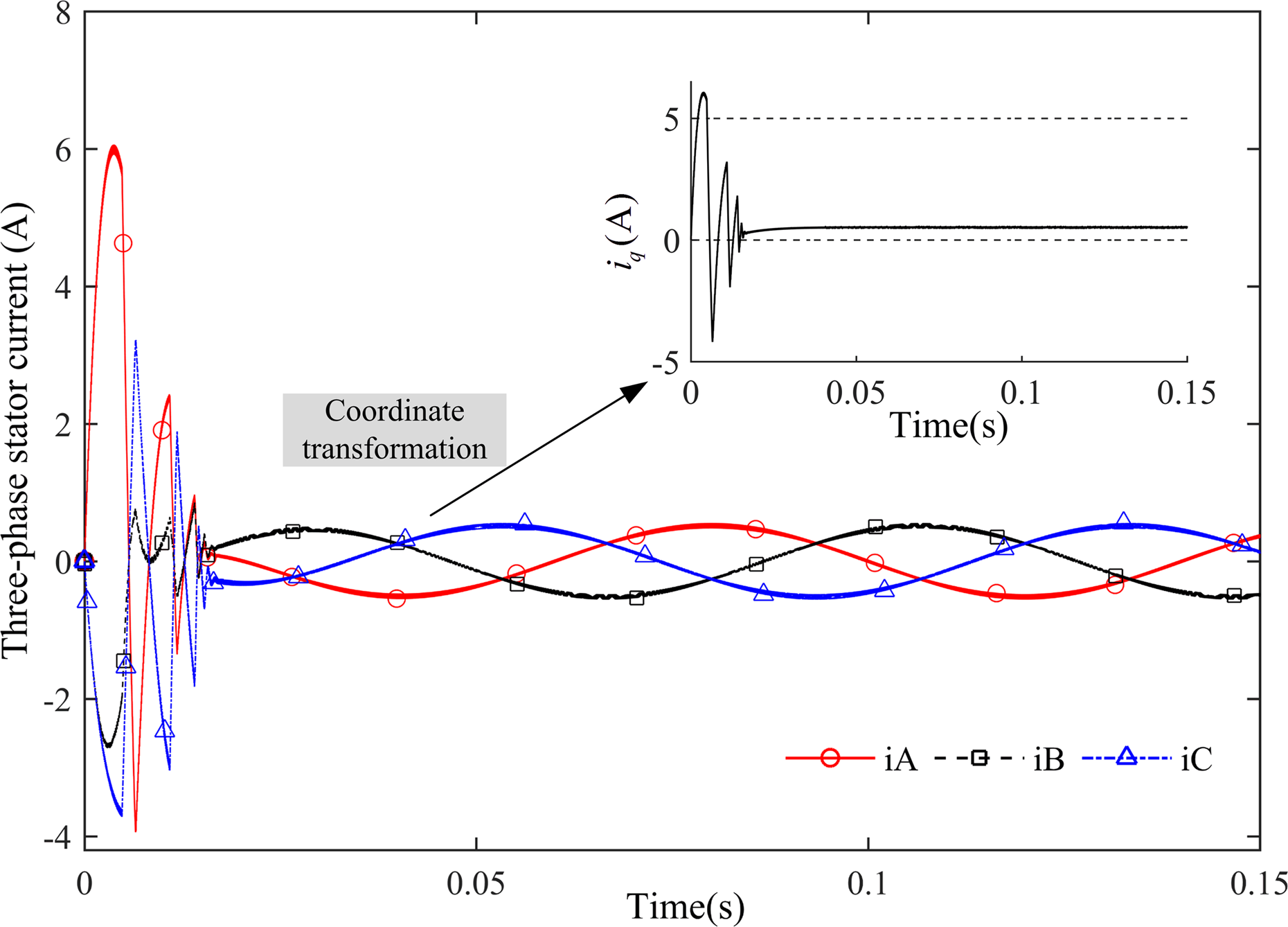
Current curve of the PMSM in the start-up phase. PMSM: permanent magnet synchronous AC servomotor.
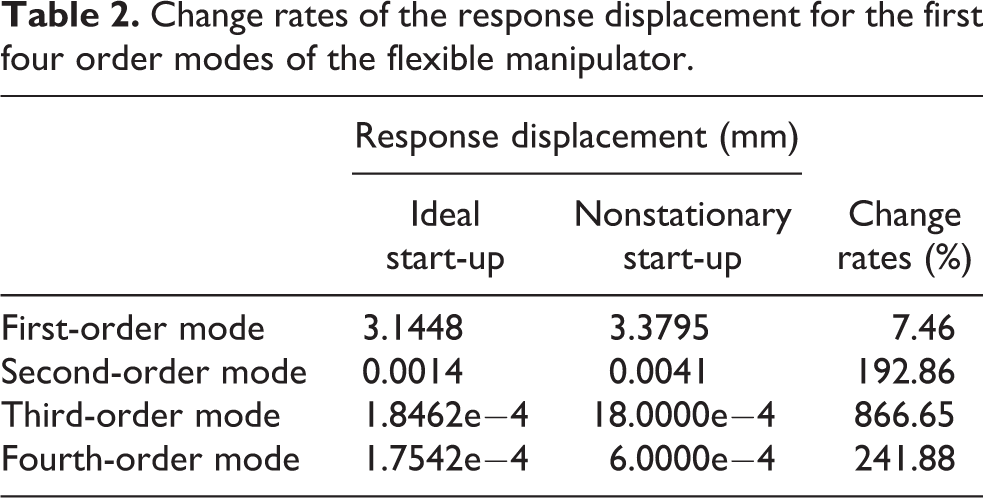
To the first four order modes of the flexible manipulator, the comparison of the response displacement and frequency characteristics for two states, the nonstationary start-up and ideal start-up of the PMSM, are shown in Figures 5 and 6. It can be seen that the current disturbances of the nonstationary start-up have great influence on the amplitude of the response displacement and almost have no effect on the response frequency. The results illustrated in Table 2—the change in rates of the response displacement for the first four order modes are 7.46%, 192.86%, 866.65%, and 241.88%, respectively—indicate that the influence of the current disturbances on the response displacement becomes obvious with the increase of the vibration modes. Furthermore, the effect on the response displacement of the third-order mode is the largest.

Response displacements of the first four order modes for the nonstationary start-up and ideal start-up of the PMSM. PMSM: permanent magnet synchronous AC servomotor.

Frequency characteristics of the first four order modes for the nonstationary start-up and ideal start-up of the PMSM. PMSM: permanent magnet synchronous AC servomotor.
Change rates of the response displacement for the first four order modes of the flexible manipulator.
Further, in order to analyze the special influence mechanism of the current disturbances of the nonstationary start-up on the vibration characteristics of the flexible manipulator, under different target feed speed of the PMSM, the frequency characteristics of the current disturbance signals are presented in Figure 7. It can be seen that the feed speed of the PMSM has impacts on both the frequency component and its amplitude of the current disturbances. Furthermore, with the increase of the target speed, the dominant frequency component and its amplitude decrease and the reduction degree of the dominant frequency component is relatively slight. However, although the dominant frequency component of the current disturbances declines, it is always closer to the three-order natural frequency, which is 67.22 Hz, than other natural frequencies of the flexible manipulator. Finally, the results demonstrate that the current disturbances during the start-up process of the PMSM have the biggest impact on the response displacement of the three-order mode at which the resonance occurs. Unfortunately, the resonance of the response displacement of the three-order mode exists for long time, and it is of significant harm to the movement stability and high-precision positioning of the flexible manipulator.

Power of qi frequencies for different target feed speed.
Under the influences of the current disturbances, the change in values of the tip vibration displacement of the flexible manipulator for different target feed speed is shown in Figure 8. It can be obtained that the larger the target speed, the more obvious changes of the tip vibration, which is manifested by the increase of the change in values of the tip vibration displacement.
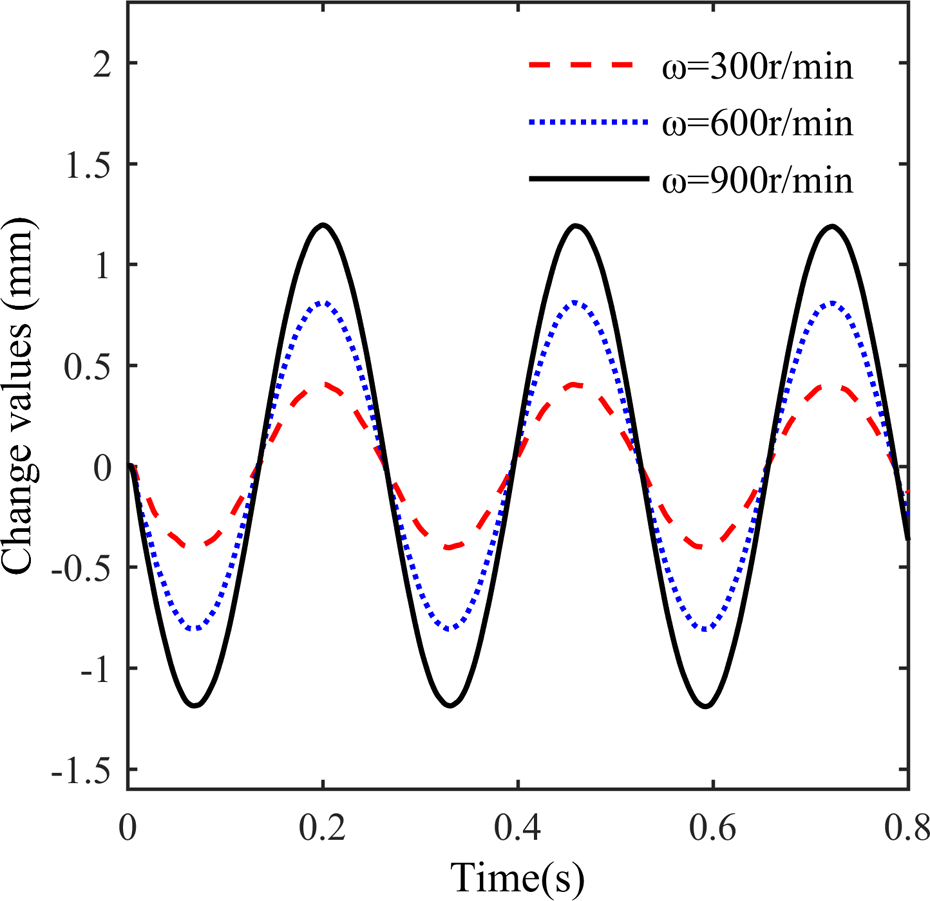
Influences of the current disturbances on the tip vibration for different target feed speed.
Conclusions
Under the disturbance excitation of the motor stator current, the high-amplitude vibration and motion instability can be aroused in the flexible robot manipulator, especially in the motor start-up stage. Thus, this article presents the theoretical analysis and experimental simulation of the electromechanical coupling vibration characteristics for an AC servomotor-driven translational flexible manipulator. The global electromechanical coupling dynamic model of the flexible manipulator of an AC servomotor-driven linear positioning platform is constructed and the decoupling analysis of the model is completed. The results show that the influences of the current disturbances on the elastic vibration of the flexible manipulator become more obvious and the dominant frequency component of the current disturbances as well as its amplitude decreases, with the increase of the target speed. Moreover, the dominant frequency component of the current disturbances, of which reduction degree is relatively slight, is always close to the three-order natural frequency of the flexible manipulator. Then, the high-order mode vibration of the flexible manipulator is aroused. Above all, for the dynamic characteristics analysis and vibration control design of the flexible manipulator, the current disturbances of motor start-up should be considered more seriously. The analysis results are important guidance for the vibration control design and accurate positioning operations of the flexible robot manipulator in future work.
Footnotes
Author’s Note
Author Yu-Fei Liu is currently affiliated to School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu 241000, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was partially supported by the National Natural Science Foundation of China (No.51305444 and No.51307172), the Scientific and Technological Project of Jiangsu Province (BY2014028-06), the Six Talent Peaks Project in Jiangsu Province (ZBZZ-041), the Postgraduate Cultivation and Innovation Project of Jiangsu Province (KYZZ16-0213), and the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).