
Abstract
The aim of the presented article is to overcome the force overshoot issue in impedance based force tracking applications. Nowadays, light-weight manipulators are involved in high-accurate force control applications (such as polishing tasks), where the force overshoot issue is critical (i.e. damaging the component causing a production waste), exploiting the impedance control. Two main force tracking impedance control approaches are described in literature: (a) set-point deformation and (b) variable stiffness approaches. However, no contributions are directly related to the force overshoot issue. The presented article extends both such methodologies to analytically achieve the force overshoots avoidance in interaction tasks based on the on-line estimation of the interacting environment stiffness (available through an EKF). Both the proposed control algorithms allow to achieve a linear closed-loop dynamics for the coupled robot-environment system. Therefore, control gains can be analytically on-line calculated to achieve an over-damped closed-loop dynamics of the controlled coupled system. Control strategies have been validated in experiments, involving a KUKA LWR 4+. A probing task has been performed, representative of many industrial tasks (e.g. assembly tasks), in which a main force task direction is defined.
Keywords
Introduction
Highly accurate force control is strongly required in many robotic applications. 1 –6 Force overshoots might compromise the task execution, resulting in task failures and the production of waste.
Due to their limited inertia and (controlled) compliant behaviour, light-weight manipulators 7 are attractive for the execution of such applications.
Compliant joint manipulators have been investigated for human-robot safe interaction. 8 However, it is still difficult to obtain high-perfomance in force tracking applications involving such robots due to the low rate joint stiffness adaptation and due to the difficulties in compensating for the robot dynamics (such as friction, that is a function of the joint properties). High-perfomance in force tracking applications involving a compliant robot behaviour can be easier achieved by the control side. 9 Since the milestones, 10 –12 impedance control 13,14 has been particularly effective in order to interact with compliant environments. In fact, with respect to pure force controllers, 15,16 impedance control compounds an easier tunable dynamic balance response for the robot. In addition, particular design of impedance controllers, 17 grants a wide control bandwidth, thanks to a continuous adaptation of the controller.
Nevertheless, some force/deformation regulation requirements are introduced in order to improve the robustness and safety of interaction with a dynamic task, especially in the case of a precision-force process. 18 Although impedance methods have proven to be dynamically equivalent to explicit force controllers, 19 a direct tracking of explicit interaction forces is not straightforwardly allowed.
To perform a tracking of a target force based on the impedance control while preserving the properties of the impedance behaviour (e.g. to simultaneously interact with a human operator), many works have been presented. While some methods are based on the energy tank theory to preserve the passivity of the controlled system, 20,21 and other methods are based on voltage control strategy and can be applied to electrically driven robots? (even if no experimental results are shown), 22 many works are directly adapting the impedance control parameters based on the interaction force and can be divided in two main families: class (a) set-point deformation impedance controllers and class (b) variable stiffness controllers. Common solutions of class (a) methods are suggested in the literature 23 , where the controlled force is derived from a position control law, scaling the trajectory as a function of the estimated environment stiffness, calculating the time-varying PID gains. Another important approach 24 –26 involves the generation of a reference motion as a function of the force-tracking error, under the condition that the environment stiffness is variously unknown, it is estimated as a function of the measured force. Common solutions of class (b) methods consist of gain-scheduling strategies that select the stiffness and damping parameters from a predefined set (off-line calculated) on the basis of the current target state. 27 Lee et al. 28 vary the controlled robot stiffness on-line to regulate the desired contact force based on the previous force tracking error, without any knowledge of the environment. Yang et al. 29 present a human-like learning controller to interact with unknown environments that feed-forward adapts force and impedance. Oh et al. 30,31 describe a frequency-shaped impedance control method which shapes a disturbance observer in the frequency domain so that the impedance is manipulated to achieve both the compliant interaction and reference tracking.
Commonly in class (a) methods, all approaches maintain a constant dynamic behaviour of the controlled robot, so that when the environment stiffness quickly and significantly changes, the bandwidth of the controllers has to be limited to avoid instability, while in class (b) methods, stationary, known and structured environments are considered.
Despite the force overshoots, control is of primary importance in many industrial tasks (e.g. fragile components assembly and polishing), and to the best of the authors’ knowledge, few works deal with this issue. In the literature, 32 the authors investigated the possibility of adopting a class (a) controller, while in another case, 33 the authors investigated the possibility of adopting a class (b) controller to guarantee the force overshoots avoidance. Although the experimental validation shows the capabilities of the defined controllers to avoid force overshoots, the authors were not able to analytically calculate the control gains. In Roveda et al., 34 the authors propose a class (a) optimal controller. However, such control schema relies on the experimental setting of the optimal control gain and of the target force filtering parameters.
The presented article aims to propose and deeply discuss two methodologies, a class (a) control law and a class (b) control law, to analytically overcome the force overshoot issue while tracking a target force, completing the impedance control based state-of-the-art methods. While the class (a) algorithm set-point variation control law has been already described in the literature, 35 the class (b) algorithm proposes a new stiffness adaptation control law to regulate and control the interaction force. The proposed methodologies rely on a common control approach that allows us to shape the equivalent impedance of the coupled controlled robot–interacting environment system. Moreover, both of the approaches rely on the estimation of the interacting environment stiffness performed by an extended Kalman filter (EKF). The interaction force measurements are used to track the target force adapting the impedance control parameters. Both the proposed control algorithms allow us to obtain a linear closed-loop coupled robot–environment system. Therefore, control gains can be analytically on-line calculated to achieve an over-damped closed-loop dynamics of the controlled coupled system. Control strategies have been validated in experiments, involving a KUKA LWR 4+ (Figure 1). A probing task has been performed, representative of many industrial tasks (e.g. assembly tasks), in which a main force task direction is defined.

Experimental set-up. One KUKA LWR4+ is used as a variable stiffness environment. The second KUKA LWR4+ implements the optimal impedance force-tracking controller described in the article.
Interacting environment modeling and estimation
Compliant environment dynamics
Denoting

where
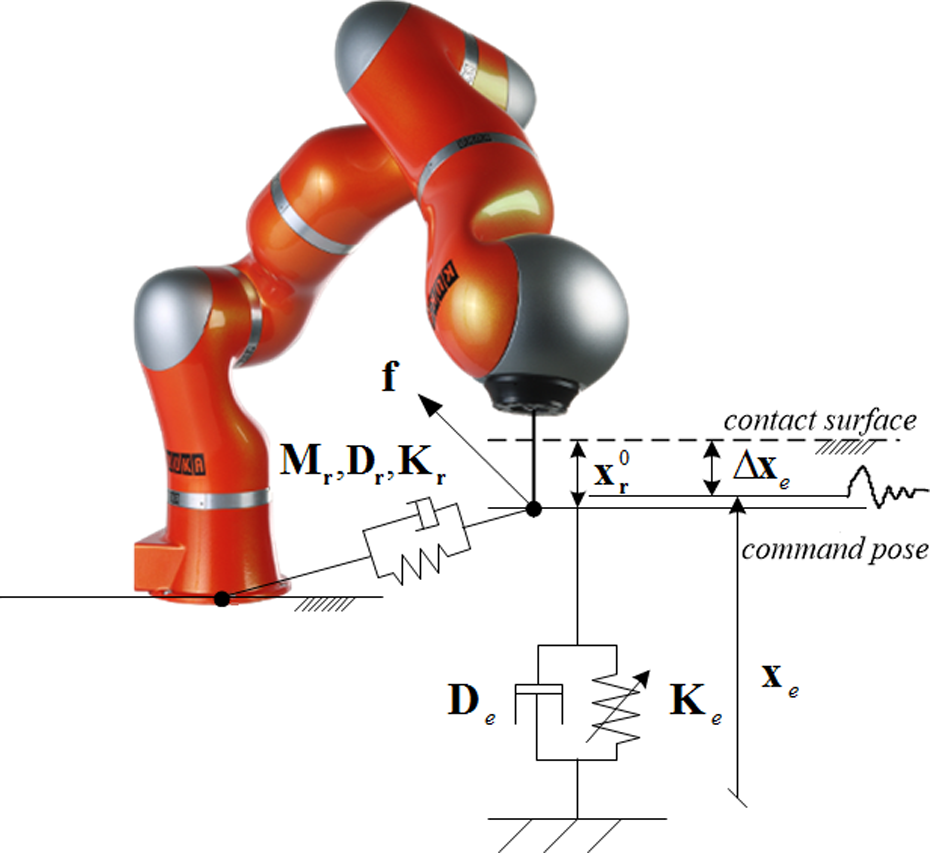
KUKA LWR 4 + interaction model.
Environment observer design
The environment model in equation (1) is used to implement an EKF for the environment stiffness estimation. Under the mild hypothesis that the contact is preserved once established and simplification hypothesis that the contact(s) are elastic, the robot-environment interaction is defined by the filter state, augmented with the environment properties

Substituting the augmented state (equation (2)) into the model equation (1), the filter dynamics result in

where the vector
The observer of the augmented state is therefore defined as

where
The state
Impedance control loop
The impedance control loop design has to guarantee a pure decoupled second-order impedance behaviour is achieved for the controlled robot up to a reasonable frequency of around 5 Hz. Such behaviour can be obtained by properly designing a control loop around the standard position controller for many lightweight industrial robots. 38 Therefore, the target dynamics for the controlled robot should result in

where
Finally, considering a stable contact point with
Remarkably, the KUKA LWR4+, that is the robot used for the experimental tests, already displays such behaviour as seen in the literature.
9
In fact, experiments show that also
Force tracking control algorithms with overshoots avoidance
General notation
The main goal of the stable force tracking control problem is related to limiting/eliminating any force overshoot. The problem is therefore formulated taking into account the coupled dynamics (controlled robot–interacting environment) for the established contact with the environment. The algorithms use the estimate of the interacting environment stiffness in order to on-line (analytically) calculate the control gains to achieve target interaction dynamics.
Both the algorithms define a linear variation of the equivalent closed-loop stiffness with respect to the force tracking error, adopting an equivalent control structure. Thus, let us denote
Sections ‘Set-point deformation strategy’ and ‘Variable stiffness strategy’ respectively, describe how the stiffness
Set-point deformation strategy
The control law here presented aims at modifying on-line the equivalent stiffness of the closed loop controlled robot acting on the impedance control set-point, in order to avoid the force overshoot when the robot is in contact with the environment.
A simple and suitable formulation for the on-line tuning of the

Thus, we can define two control signal terms

Finally, in order to avoid the dependency of the gains from the actual robot configuration (i.e. the stiffness parameter of the Cartesian impedance control), the position set-point

The control schema, considering the interacting environment observer, is shown in Figure 3.

Set-point deformation control schema, including the interacting environment observer (EKF).
Closed-loop dynamics
Considering a single DoF (as the impedance control allows to decouple the Cartesian DoF) and substituting the impedance control set-point

By imposing the equivalent closed-loop system mass as

where

are the eigenvalues of the coupled controlled system (equation (7)) and the constants c1 and c2 depends on the initial position xr,0 and velocity
Control parameters calculation
The control parameters Gp and Gd can be calculated analytically in order to guarantee the proper force tracking during the task execution, while avoiding any force overshoot.
Gp gain can be calculated considering the static term of equation (7). In fact, at the steady state, the robot position has to be equal to


Therefore, the control signal term utrg is not a function of the estimated interacting environment stiffness
Gd gain can be calculated considering the eigenvalues in equation (9). In fact, by properly defining such derivative gain it is possible to obtain an over-damped system, allowing us to avoid any force overshoot during the task execution. In particular, to have an over-damped system, the following inequality has to be satisfied

In such a way, the eigenvalues in equation (9) are negative real (

Such definition allows us to obtain an over-damped system and avoid any force overshoot.
The control gain Gd is a function of the impedance parameters Mr, Dr, Kr, of the control parameters Gp, mk, of the target force fd, and of the estimated stiffness of the interacting environment Ke. Moreover, even if equation (12) allows us to calculate the derivative control gain Gd considering a zero initial velocity
Based on equation (12), control parameters mk and K0 do not affect the force overshoots avoidance, while they affect the closed-loop bandwidth. In fact, their values define the eigenvalues in equation (9).
It has to be highlighted that if the interacting environment mass Me has to be taken into account, the equivalent mass results in
Variable stiffness strategy
The control law here presented aims at modifying on-line the equivalent stiffness of the closed loop controlled robot directly acting on the impedance control stiffness, in order to avoid the force overshoot when the robot is in contact with the environment.
A simple and suitable formulation for the on-line tuning of the

Thus, we can directly define the impedance control stiffness as

The

The control schema, considering the interacting environment observer, is shown in Figure 4.

Variable stiffness control schema, including the interacting environment observer (EKF).
Closed-loop dynamics
Considering a single DoF (as the impedance control allows to decouple the Cartesian DoF) and substituting the impedance control set-point

By elaborating such expression we obtain

By imposing the equivalent closed-loop system mass as
Control parameters calculation
The control parameters Gp and Gd can be calculated analytically in order to guarantee the proper force tracking during the task execution, while avoiding any force overshoot.
As described in Section ‘Set-point deformation strategy: Control parameters calculation’, Gp gain can be calculated considering the static term of equation (15). Therefore, the proportional gain Gp results in the following

Substituting equation (16) into equation (14) it is possible to highlight that the impedance control set-point is not a function of the environment stiffness estimation (
Gd gain can be calculated considering the eigenvalues in equation (9) as in Section ‘Set-point deformation strategy: Control parameters calculation’ to obtain an over-damped closed-loop system

Such definition allows us to obtain an over-damped system and avoid any force overshoot.
The control gain Gd is a function of the impedance parameters Mr, Dr, Kr, of the control parameters Gp, mk, of the target force fd, and of the estimated stiffness of the interacting environment Ke. Moreover, even if equation (17) allows us to calculate the derivative control gain Gd considering a zero initial velocity
Based on equation (17), control parameters mk and K0 do not affect the force overshoots avoidance, while they affect the closed-loop bandwidth. In fact, their values define the eigenvalues in equation (9).
It has to be highlighted that if the interacting environment mass Me has to be taken into account, the equivalent mass results in
Free-motion approach velocity controller
As described in ‘Set-point deformation strategy: Control parameters calculation’ and in ‘Variable stiffness strategy: Control parameters calculation’, the derivative gain Gd can be calculated to take into account non-zero approach velocities for both the proposed control strategies. Thus, it is possible to avoid any force overshoot even if the robot has to perform multiple non-contact to contact phases. In more detail, for the free-space motion it is possible to define a velocity control loop to approach the target environment with a target velocity as follows (considering 1 DoF)

where Gv is the velocity control gain and
Therefore, considering the free-space motion, control gains are imposed

where τith is the time constant of the control gain adaptation. The dynamics of the logistic functions is faster than the dynamics of the observer and of the control loop (at least 1 decade). Therefore, the analytical control gains adaptation defined in Section ‘Set-point deformation strategy’ and in Section ‘Variable stiffness strategy’ will not be affected by the logistic function dynamics.
Experimental results
All of the quantities are referred to the robot base reference frame. The impedance loop rate is 200 Hz, synchronously with the environment estimation. In fact, the KUKA LWR 4+ allows us to tune such control loop rate. 9 Signals are updated to the main LWR 4+ control loop, together with the sampling of force (used in the control loop and by the EKF) and the kinematics state. The remote controller is a real-time Linux Xenomai PC with RTNet.
The coupled environment is implemented using a second KUKA LWR 4+ (see Figure 1), setting
Set-point deformation strategy
Control gains has been imposed as follows:
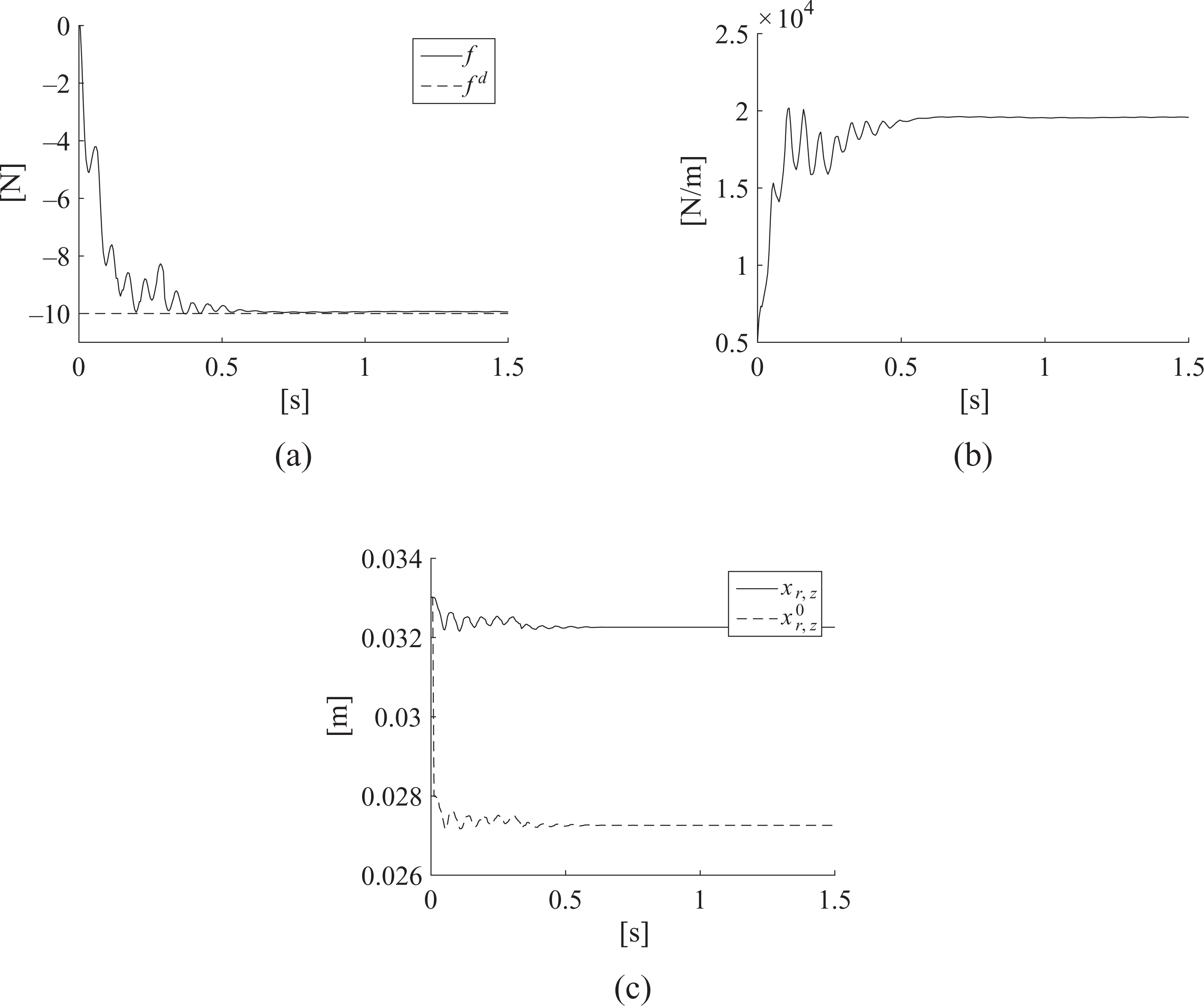
Figure 5(a) shows the measured force during the interaction task execution using the set-point deformation control algorithm. Force overshoots are avoided and the proper force tracking is achieved. In fact, the force error is less than 1 % (i.e. negligible force error), attributable to non-compensated dynamic, as static friction. Figure 5(b) shows the estimated environment stiffness during the task execution. Figure 5(c) shows the measured xr,z and commanded

Set-point deformation approach. (a) Interaction target and measured forces are shown. (b) Estimated environment stiffness is shown. (c) Robot measured xr,z and commanded
Variable stiffness strategy
Control gains has been imposed as follows:
Variable stiffness approach. (a) Interaction target and measured forces are shown. (b) Estimated environment stiffness is shown. (c) Robot measured xr,z and commanded
Figure 7 shows the impedance control stiffness Kr,z calculated and commanded during the task execution. Since KUKA LWR 4+ impedance control allows us to impose a stiffness in the range [0, 5000] N/m,9 the maximum stiffness is saturated at 5000 N/m. Only one oscillation is saturated. To avoid such behaviour control parameters can be tuned to reduce the control bandwidth.
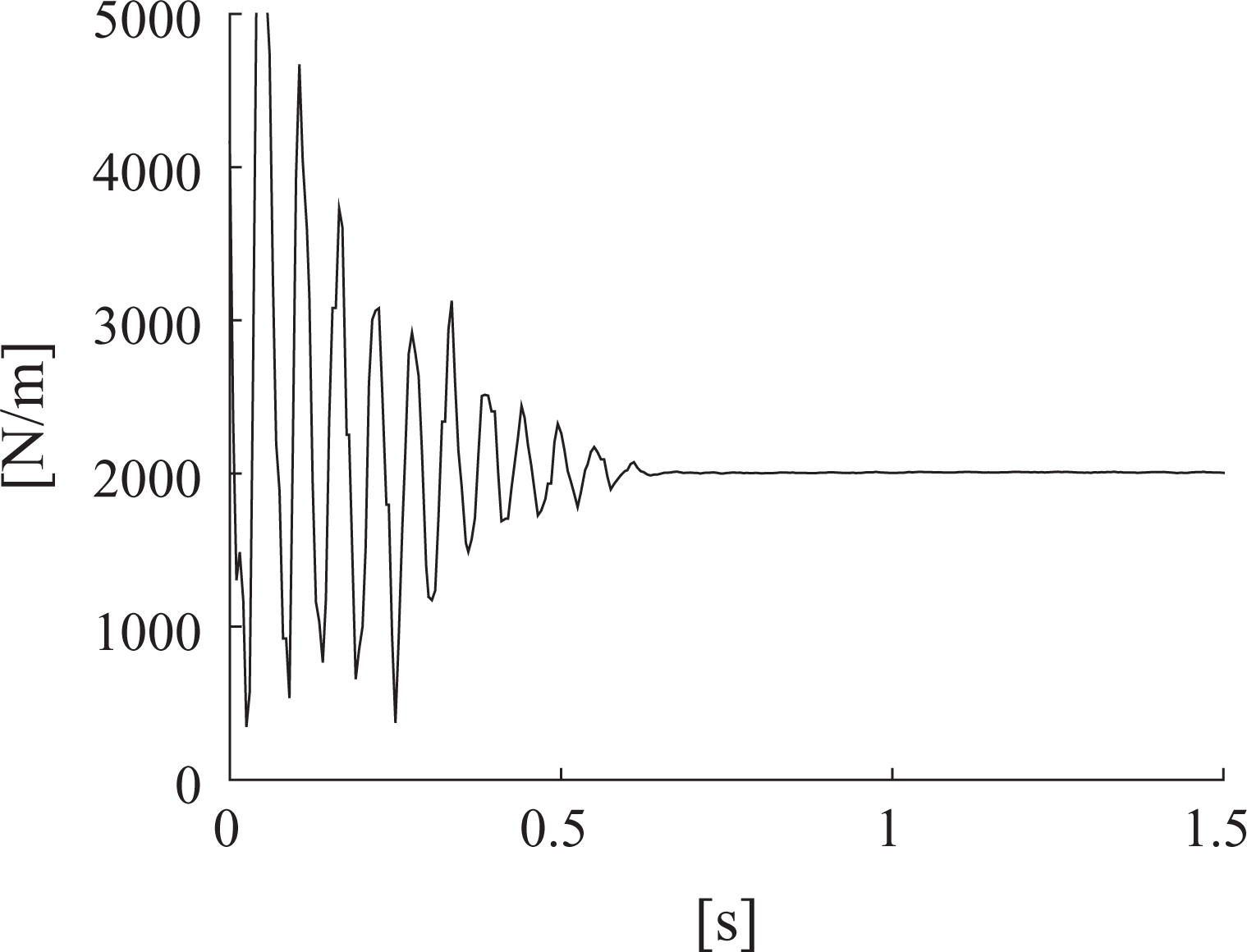
Variable stiffness approach. Impedance control stiffness Kr,z during the task execution.
Methods comparison
Since a common structure has been adopted for both the control strategies (i.e. both of the control strategies (a) and (b) rely on the definition of an equivalent stiffness
Both of the approaches allow us to obtain the tracking of the target force with a zero-steady-state force error as shown in ‘Set-point deformation strategy: Control parameters calculation’ and in ‘Variable stiffness strategy: Control parameters calculation’, even if estimation errors are affecting the environment stiffness estimate
Conclusions
The described article proposes two control algorithms (a set-point deformation algorithm and a variable stiffness algorithm) to overcome the force overshoot issue in impedance based force tracking control, completing the state-of-the-art methods. Both of the algorithms rely on a common control law to shape the equivalent impedance of the coupled controlled robot–interacting environment system (the interaction force is used to regulate the closed-loop stiffness of the controlled manipulator) and on the estimation of the environment stiffness performed by an EKF. In such a way, control gains can be analytically on-line calculated to achieve an over-damped closed-loop dynamics of the controlled coupled system. Control strategies have been validated in experiments, involving a KUKA LWR 4+. A probing task has been performed, representative of many industrial tasks (e.g. assembly tasks) in which a main force task direction is defined. Future work will investigate the possibility of extending the proposed approach to rotational degrees of freedom and will consider the application of such control algorithms to a direct human-robot cooperation in interaction tasks.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: The work has been developed within the project European Robotic Challenge, funded from European Unions Seventh Framework Programme under grant agreement n. 608849.