
Abstract
The escalating incidence of sudden medical emergencies has imposed formidable challenges on emergency medical response, especially timely medication delivery during the “golden window of treatment” in the early stages of the patient's illness. However, in large confined spaces such as underground mines, traditional medication delivery methods often struggle to reach the patient's location promptly, which significantly compromises the patient's treatment efficacy and chances of survival. Therefore, it is urgent to develop more efficient and flexible medication delivery strategies to address complex and changing rescue scenarios. To achieve efficient patient localization and emergency medication delivery in confined spaces, this paper proposes an autonomous unmanned aerial vehicle (UAV)-based search and rescue strategy. First, upon detecting an obstacle, the UAV dynamically adjusts its orientation toward the obstacle. Second, during the patient search phase, the priority of viewpoints within already searched areas and at the frontiers of unsearched areas is increased. Finally, through systematic patient search simulations and experiments using autonomous UAVs carrying emergency medicine, the effectiveness and superiority of the proposed search scheme in terms of search time and search path length are verified.
Introduction
With the advancement of society, an increasing number of individuals are experiencing chronic health conditions, which are often caused by factors such as psychological stress, excessive fatigue, and unhealthy lifestyle habits, which may precipitate acute medical events including heart diseases, cerebral infarctions, medication overdoses, seizures, and traumas.1,2 The onset of such illnesses is often sudden and associated with a high mortality rate, making timely access to emergency medication a critical factor in patient survival.3,4 Although emergency medical supplies are available in many public areas for rapid treatment, in large confined spaces such as office buildings, subway tunnels, and underground mines, it is extremely difficult to quickly locate patients and deliver medication via rescue personnel once an incident occurs. Owing to their strong terrain-crossing capabilities and high maneuverability, unmanned aerial vehicles (UAVs)—initially developed for aerial photography, pesticide spraying, and other purposes5,6—have undergone rapid advancement. Applying UAVs to the delivery of civilian medical supplies can leverage their inherent advantages, thereby increasing the survival probability of patients. UAVs can be used to rescue the patient in mine caves, as shown in Figure 1.
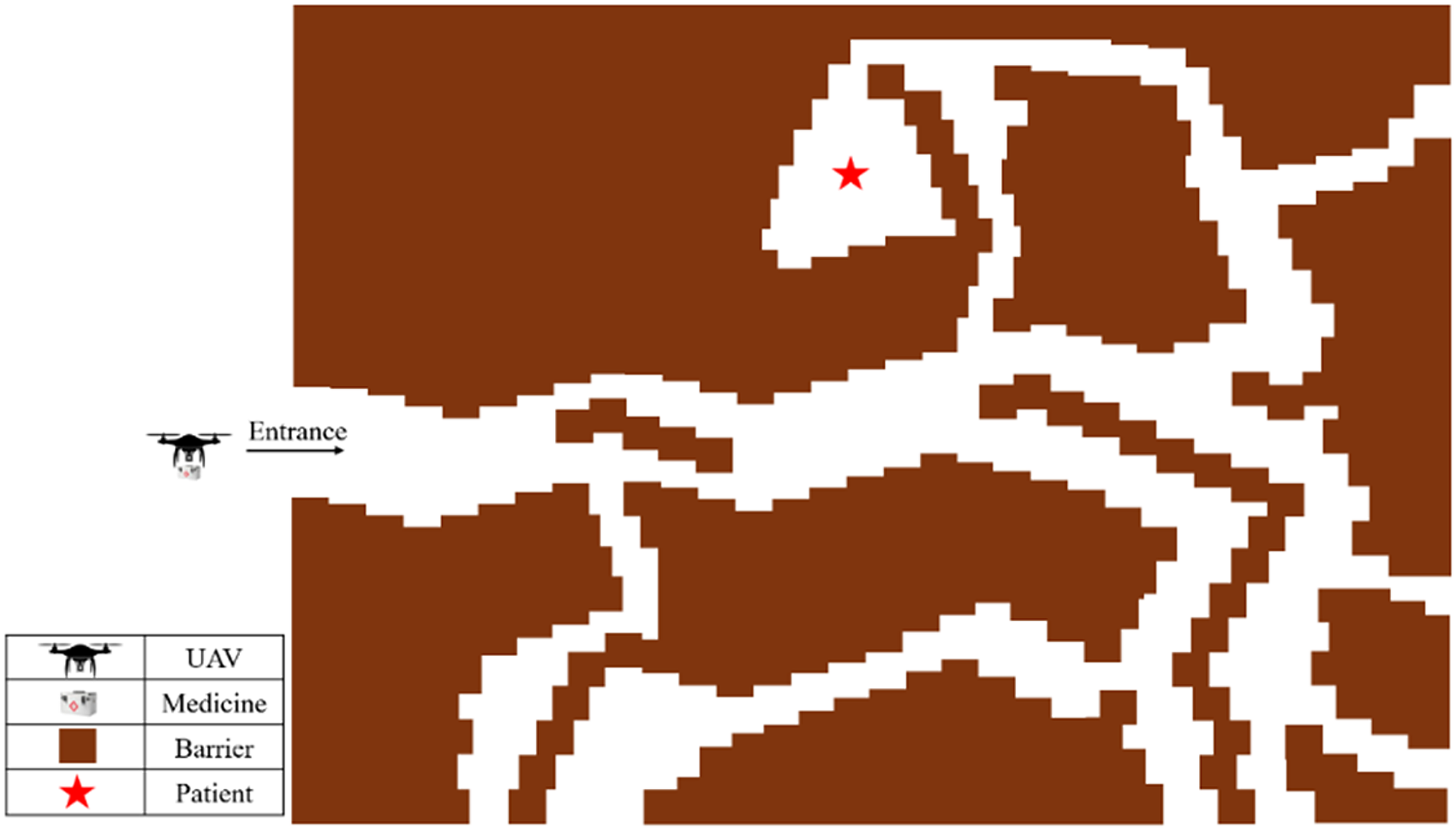
UAVs carrying emergency medicine for mine search and rescue. UAV: unmanned aerial vehicle.
Recent years have witnessed a surge in the deployment of UAVs for emergency rescue missions, ranging from disaster zone assessment to time-critical medical supply delivery.7–9 In, 10 UAVs are deployed to deliver COVID-19 therapeutics and diagnostic equipment, avoiding direct person-to-person contact, thereby reducing the risk of infection. In, 11 a novel UAVs-assisted healthcare delivery system is proposed. It reduces medication delivery time. In, 12 UAVs are utilized to deliver automated external defibrillators (AEDs), substantially reducing the rescue waiting time for out-of-hospital cardiac arrest patients. In, 13 the application of machine learning to UAV-based pharmaceutical transport in remote regions transforms UAV operation from traditional manual remote control to fully autonomous flight, thereby enhancing delivery efficiency and reducing personnel training costs. In, 14 Zipline's UAVs are deployed to transport blood for the purpose of saving the lives of residents in Rwanda. In, 15 Experimental results demonstrate that UAV-based AED delivery not only achieves a success rate of 92% but also significantly reduces response time compared to traditional ambulance-based AED transportation.
The foregoing research has all dealt with the transportation of medical supplies in outdoor environments with well-defined start and end points. Nevertheless, these approaches do not address indoor patient treatment scenarios in which exact patient locations are unknown. Otherwise, unlike outdoor environments, indoor scenarios are characterized by GPS denial,16,17 poor network connectivity, and complex surroundings. In order to conduct patient search-and-rescue operations and deliver medical supplies within confined environments such as mine caves, UAVs must be endowed with the capability to autonomously search unknown spaces. In recent years, several studies have focused on exploration in confined environments. In, 18 an efficient frontier-based autonomous UAV exploration strategy is proposed to overcome the challenges of inefficient and incomplete map construction. However, when the environmental terrain changes are complex, it may lead to unstable frontier selection. In, 19 frontier-based exploration for global coverage with implicit surface uncertainty-based reconstruction frontier information is incorporated to guarantee global coverage of UAV exploration. However, frontier exploration requires a large number of sampling viewpoints in large-scale dense environments, which affects planning efficiency. In, 20 a visual-inertial odometer (VIO) and frontier-based exploration are designed for the autonomous navigation of indoor environments by UAVs, but the performance of visual sensors degrades significantly in occlusion and low-texture areas, resulting in a decrease in VIO accuracy. In, 21 an efficient exploration planning method for large-scale three-dimensional environments is proposed, which significantly improves planning efficiency and exploration coverage. In, 22 a UAV exploration method based on frontier viewpoint exploration and incremental information gain is proposed, improving the exploration completion rate of UAVs in unknown environments. However, the aforementioned methods suffer from low efficiency due to suboptimal viewpoint-selection strategies, the complexity of frontier detection and low VIO accuracy, significantly prolonging the time required for patient search and rescue. For critically ill patients, every second is vital, and such inefficiencies in patient search markedly increase the risk of patient mortality.
Therefore, in order to efficiently enable UAVs to autonomously deliver emergency medical supplies to patients at unknown locations within complex and confined environments, this paper proposes a patient search and emergency medication delivery scheme based on autonomous UAVs, making the UAV an excellent assistant for rescuing patients in confined environments. The emergency medication delivery method adopts precise landing delivery by UAVs. The innovations of this paper are summarized as follows.
For emergency rescue of patients in confined spaces, we propose an autonomous UAV strategy for search and emergency medication delivery. In order to improve the efficiency of patient search using autonomous UAVs and reduce patient risk, we propose a sampling viewpoint method for the presence of obstacles within the UAV's sensing range and consider the priority of two types of viewpoints: viewpoints in the frontier cluster within the searched area and viewpoints in the frontier of the unsearched area. Through patient search simulation and experiments, the effectiveness and superiority of our proposed autonomous UAV search and rescue strategy are verified.
In the rest of this paper, in order to improve the efficiency of the patient search, Section Incremental frontier detection and updating proposes frontier generation and elimination as well as sampling viewpoint methods that include obstacles. In order to timely deliver medication and reduce patient risk, Section Frontier search sequences solution based on asymmetric traveler problems proposes two methods to increase the priority of viewpoints located at the frontier of the search and unsearched area, and solve the asymmetric traveling salesman problem (ATSP). Section Simulation experiment demonstrates the effectiveness of our proposed scheme through patient search simulation and experiments. Section Summary summarizes the conclusions of this paper.
Incremental frontier detection and updating
Autonomous UAVs are characterized by their flexibility, high efficiency, and long-range operational capability. They can swiftly complete patient search and rescue tasks in complex and confined environments, and deliver emergency medication to patients timely. The environmental information is perceived by the UAV through the sensors carried by itself. When the environment is divided into grid cells, each cell represents the occupation state of a specific area and is classified as either free
Frontier generation and segmentation
An incremental frontier information is constructed for the corresponding frontier cluster, which contains: 1) the positions of all frontier cells within the frontier cluster; 2) the average position of the frontier cluster; 3) the minimum axis-aligned bounding box that can encompass the entire frontier cluster, 4) the viewpoints with specified positions and viewing directions; and 5) the cost between the frontier clusters. To optimize update efficiency during frontier state transitions, an autonomous UAVs-based patient search system implements an overlap detection mechanism between pre-update
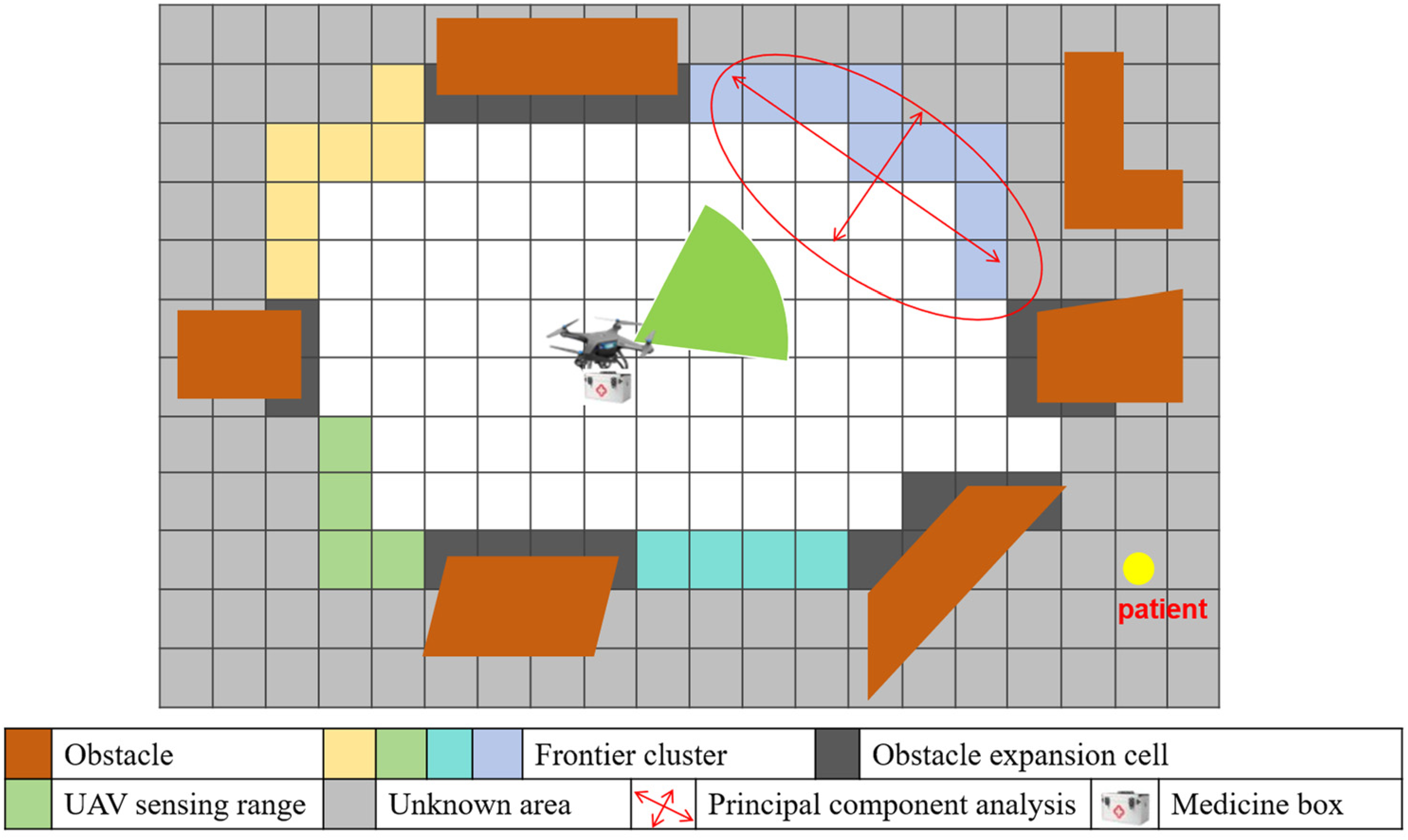
When frontiers change, old frontier units are deleted and a clustering method is used to generate new frontier clusters for the new frontier units. If the newly generated frontier clusters are too large, the UAV is not able to cover such frontier clusters, as shown in Figure 2. Principal component analysis (PCA) is used to split the frontier clusters into two smaller frontier clusters to ensure that each frontier cluster can generate viewpoints that cover itself.
Schematic diagram of frontier cluster segmentation.
Frontier sampling viewpoint strategy considering obstacles
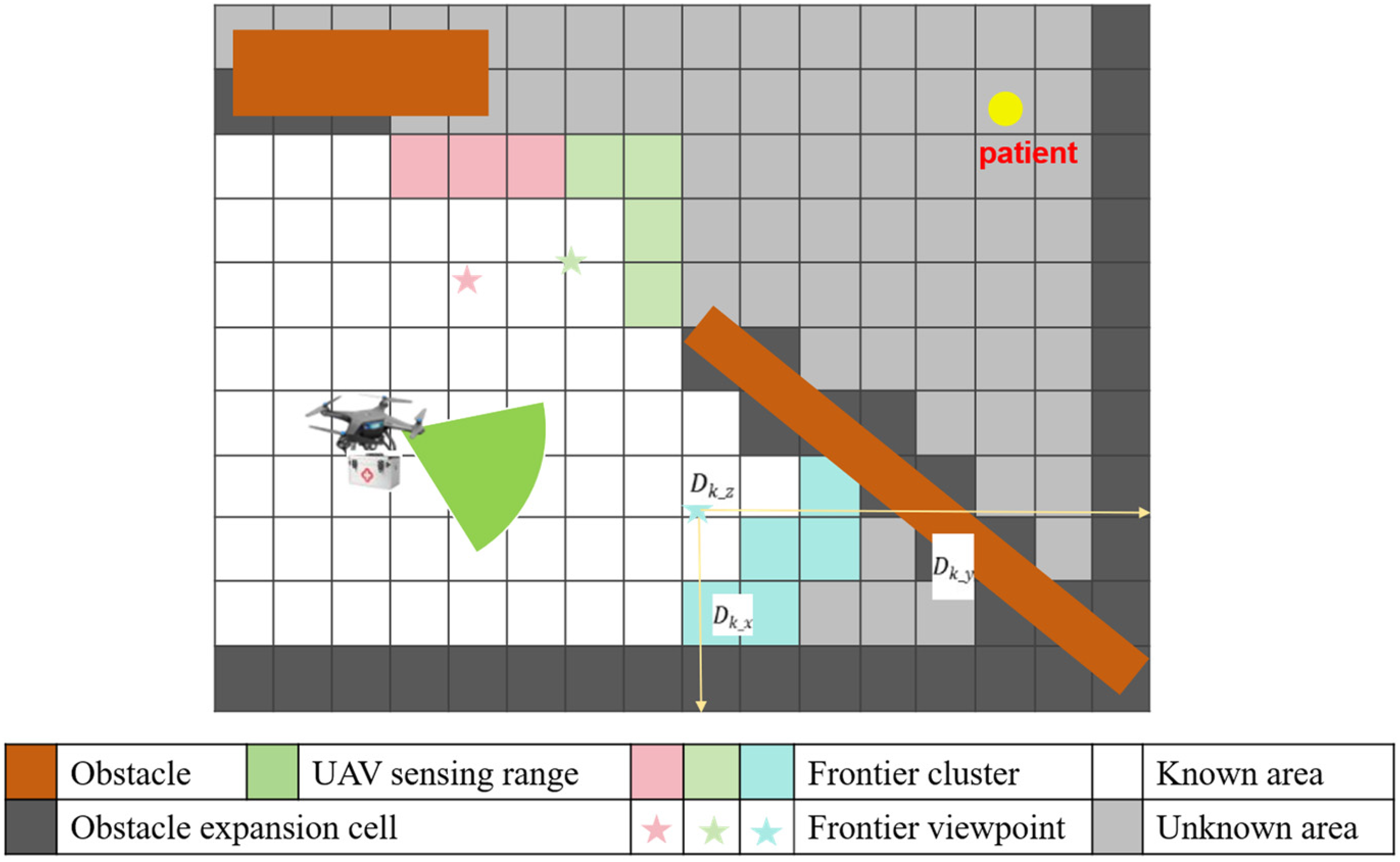
In order to improve the patient search efficiency of autonomous UAVs during emergency medication delivery in confined spaces, reasonable sampling viewpoint generation is beneficial for more efficient patient search. 23 The more unknown voxels observed by the sampling viewpoints, the higher the quality of the sampling viewpoints. The highest quality sampling viewpoint corresponding to each frontier cluster is used as a node for path planning in the patient search task. During the frontier elimination process, some areas contain obstacles. Some obstacle surfaces may be overlooked during the patient search, and sampling only near the frontiers cannot accurately represent the information about obstacles in the environment. Paths generated by the frontier sampling viewpoint may also result in incomplete search near obstacles.
As shown in Figure 3, where Figure 3(a) shows that the obstacle is outside the perception range of the sensor, Figure 3(b) shows that the autonomous UAV is not reasonably oriented to the obstacle, and Figure 3(c) shows a better obstacle viewpoint selection. The selection criteria for a qualified frontier viewpoint containing an obstacle are as follows: (1) The distance between the obstacle and the autonomous UAV should be within a reasonable range. (2) The orientation of the autonomous UAV towards obstacles should be within a reasonable range.
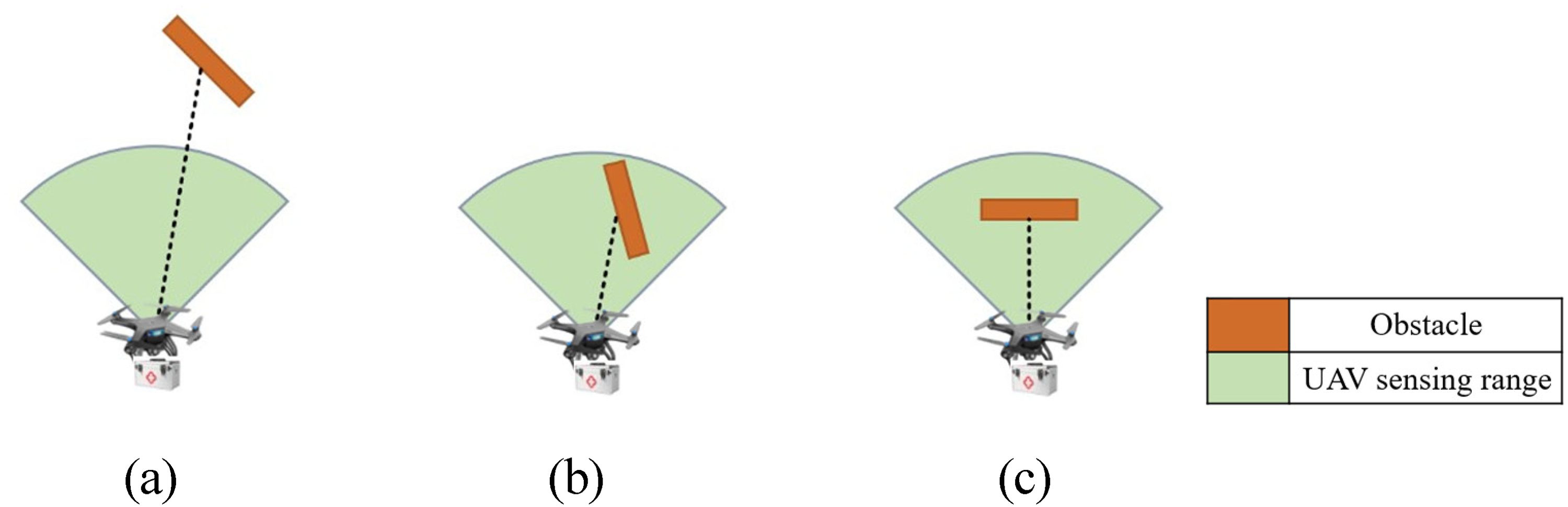
Selection of obstacle viewpoint orientation.
When an obstacle is within the perception range of the sensor, the autonomous UAV should first move in the direction of the large area of the obstacle to reduce search in the large frontier area. This paper performs conditional judgment in the process of sampling viewpoint of the frontier and the frontier cluster

where
By performing PCA on
Obstacle surfaces are processed as frontier clusters for classification, while simultaneously incorporating yaw angle adjustments with enhanced directional bias toward obstacle surfaces. These surface elements are subsequently clustered to constitute obstacle cluster

The eigenvector corresponding to the smallest eigenvalue, i.e. the normal vector of the obstacle cluster, is derived from the obstacle cluster



where
First, sampling points that are not within a certain range of the obstacle cluster are removed to obtain the optimized sampling point
The sampling viewpoint

The angular relationship

The final yaw angle for the sampling viewpoint in the presence of obstacles is


By adopting different sampling strategies for whether the frontier area contains obstacles or not, it can not only improve the efficiency of patient search using autonomous UAVs in unknown environments, but also improve the completeness of obstacle mapping during the patient search process. Different sampling strategies reduce the lack of information on the surface of obstacles and the omission of frontiers due to insufficient search, prevent the autonomous UAV from repeatedly turning back due to incomplete frontier elimination, and improve the patient search efficiency of the UAV.
Frontier search sequences solution based on asymmetric traveler problems
During emergency medication delivery, when the autonomous UAV fails to locate the patient, it must prioritize environmental search in unknown confined spaces. By leveraging frontier cluster viewpoints, the autonomous UAV generates optimized search trajectories where each viewpoint is visited exactly once. This problem can be described as a classic traveling salesman problem (TSP). By solving the TSP, a sequence of search viewpoints can be obtained. However, unlike the traditional TSP, the autonomous UAV's patient search does not require returning to the starting point. Consequently, this paper constructs an ATSP matrix to solve the problem of frontier search order. The following sections detail our methodology for prioritizing the frontier viewpoint visit order during the patient search using autonomous UAVs.
Raising the priority of different viewpoints
The viewpoint within the search area
Throughout the patient search process, the autonomous UAV dynamically maintains a search of mapped areas and their associated frontiers. As the autonomous UAV progresses through the environment, the search area gradually expands. In order to improve search efficiency, the missed areas within the already searched area are eliminated before continuing outward search, as shown in Figure 4. Because such viewpoints will not significantly change the overall trajectory, timely elimination of frontier clusters in the search area can prevent the autonomous UAV from turning back midway to eliminate missed areas in the previous search.
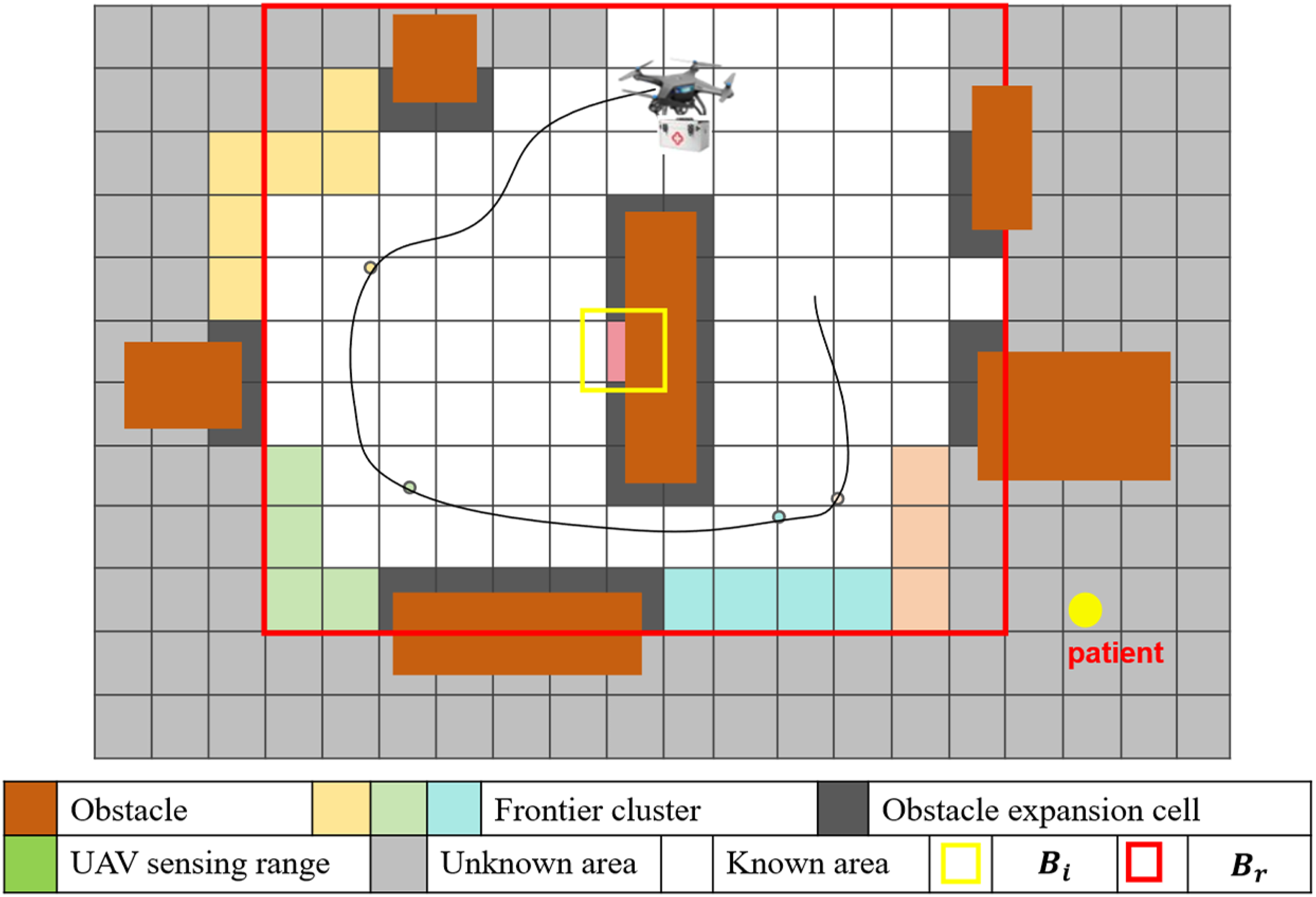
Schematic diagram of the search area including the frontiers.
The viewpoint located at the frontier of the search area
When the autonomous UAV approaches the frontier of the search area, the frontier should be more complete, as shown in Figure 5, where
Schematic diagram of the frontier viewpoint close to the map frontier.
Constructing an asymmetric traveling salesman matrix
In order to reduce the search time and improve patient search efficiency, this paper combines the proposed strategy of improving the viewpoint search order priority in Section Raising the priority of different viewpoints. By constructing the ATSP cost matrix, the search order priority corresponding to the viewpoints close to the search area boundary and the viewpoints located in the search area are added to the cost matrix. Solving the ATSP cost matrix obtains a better frontier search order and reduces the duplication of the UAV search path. In addition, the flight distance, yaw angle, and velocity direction are considered comprehensively to obtain a frontier search order to minimize the autonomous UAV's search time and search path.
We solve the order problem of frontier cluster viewpoints by constructing the cost matrix

According to the FAEP method,
24
the minimum distance between the frontier cluster viewpoint

The cost term between the frontier cluster viewpoint

The time cost term

To mitigate reciprocating behavior in search trajectories induced by the viewpoint selection, a directional consistency penalty term

If the viewpoint

The total cost from the current position of the autonomous UAV

The cost of one frontier cluster viewpoint

The cost of the frontier cluster viewpoint

The traveler problem is converted to an asymmetric traveler problem by setting the cost of the frontier cluster viewpoint to the UAV's current position to zero. Two factors that cause the search path to move back and forth are included in the viewpoint sequence cost matrix
Following the computation of the frontier viewpoint visit order, the results obtained are a sequence of frontier viewpoints, rather than the trajectory information of the autonomous UAV. Subsequent path planning must be performed based on these frontier search sequences. We implement Minco 26 trajectory optimization to generate a real-time path of the autonomous UAV during patient search, ensuring computational efficiency while maintaining dynamical feasibility.
Simulation experiment
In order to ensure that the autonomous UAV can quickly find the patient and deliver the emergency medicine during the search and rescue process, a patient search simulation is first conducted to verify the effectiveness of our proposed scheme. The experimental scenario is a 14 × 30 × 2 m3 confined space. In addition, we conduct multiple simulation experiments with different sampling radius step size parameters
This paper compares the proposed search scheme with existing advanced search schemes, highlighting the superiority of our proposed scheme. Patient search results of the autonomous UAV carrying emergency medicine under our proposed scheme are shown in Figure 6. The shaded area is the unknown map environment, the purple area is obstacle information, the blue area is the searched coverage, the solid line is trajectory information of the autonomous UAV and the yellow dot represents the patient. Patient search results of the autonomous UAV carrying emergency medicine under the FUEL scheme 22 are shown in Figure 7, and patient search results of the autonomous UAV carrying emergency medicine under the Aeplanner scheme 23 are shown in Figure 8. The initial UAV's position is (00,1), and the maximum search speed is configured as 1.5 m/s, and the maximum acceleration is configured as 1.0 m/s2.
Patient search results of the autonomous UAV carrying emergency medicine under our proposed scheme. UAV: unmanned aerial vehicle.
Patient search results of the autonomous UAV carrying emergency medicine under the FUEL scheme. UAV: unmanned aerial vehicle.

Patient search results of the autonomous UAV carrying emergency medicine under the Aeplanner scheme. UAV: unmanned aerial vehicle.
Table 1 shows the comparison of our proposed scheme with the FUEL and Aeplanner search schemes in the confined scenario during the patient search process. Compared with the FUEL scheme, our proposed scheme reduces the search time by 53.87% and the search path length by 54.39%. Compared with the Aeplanner scheme, the search time is reduced by 60.49% and the search path length is reduced by 60.70%. By optimizing the frontier sampling viewpoints and visit order, the proposed patient search scheme reduces the situation of round-trip search paths and search omissions. The search path and search time of our proposed scheme are both superior to those of the other two search schemes. This verifies that the proposed search scheme has more efficient patient search performance compared to existing advanced search schemes. In the process of emergency medication delivery, it can search for the patient more quickly, providing valuable time for rescue.
Patient search comparison of the autonomous UAV carrying emergency medicine in confined scenes.
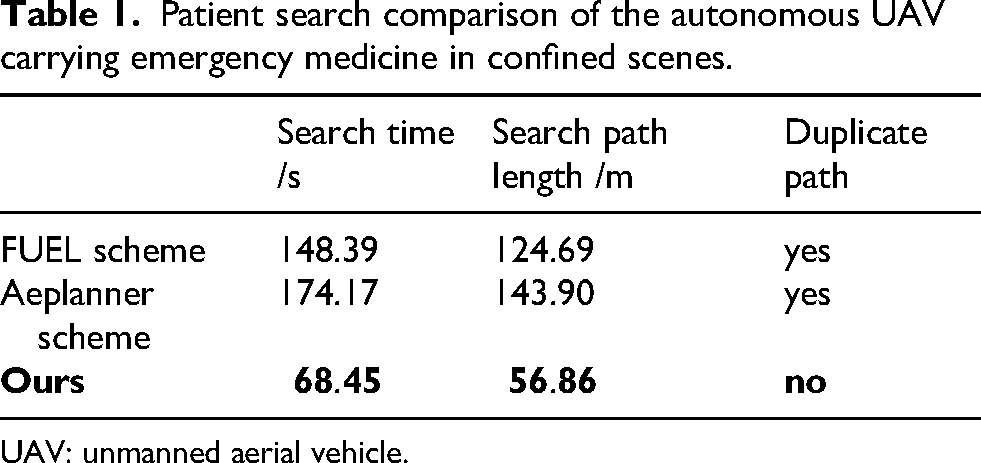
UAV: unmanned aerial vehicle.
Real experiment
In order to more realistically simulate the emergency response scenario involving patients under the ground, we select an underground garage with a size of 30 × 15 × 2 m3 as the experimental environment and carry out actual patient search and rescue experiments. This space has typical underground scene characteristics such as insufficient lighting, complex structure, and GPS denial, which helps to verify the performance of the autonomous UAVs-based patient search system in a real confined environment. The autonomous UAV with a wheelbase of 250 mm is equipped with a camera (Intel RealSense D435), a Lidar (Livox Mid360), and an onboard processor (Nvidia Orin NX 16GB) to enable autonomous positioning, navigation, patient recognition, obstacle avoidance, etc. A medicine box is mounted under the body to deliver medication to trapped patients.
In the experiment, the UAV adopts the Lidar and the Faster-LIO algorithm for real-time autonomous positioning. To evaluate the accuracy of this positioning scheme, we conduct a closed-loop motion experiment. By recording the pose deviation of the UAV when completing the closed-loop motion and returning to the starting position, the positioning error is quantitatively evaluated. Experimental results show that the positioning errors of the UAV in the three-dimensional directions are within 2 mm. Compared to the experimental scene scale, the corresponding relative error is very small, indicating extremely high positioning accuracy. Its impact on the viewpoint selection and path planning is negligible. For the patient recognition model, this paper adopts the existing YOLOv8 and trains it on a dataset containing complex scenes such as low light and occlusion. To evaluate its detection performance, this paper divides the dataset into training, validation, and test sets, and quantitatively evaluates the recognition model on the test set. Experimental results show that the YOLOv8 achieves a high recognition accuracy of 91.8% and a recall of 85.1%, while the false positive rate is 5.7%.
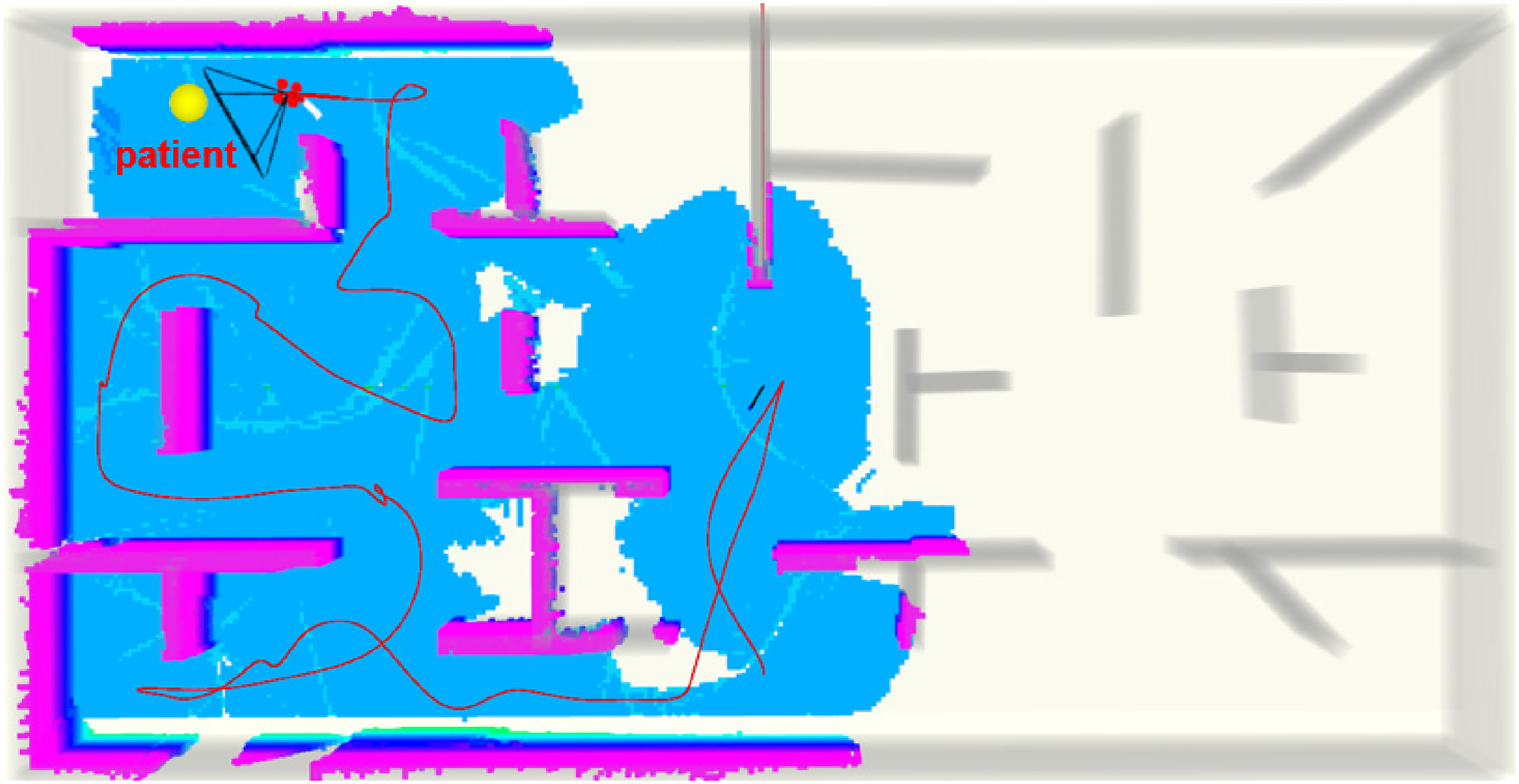
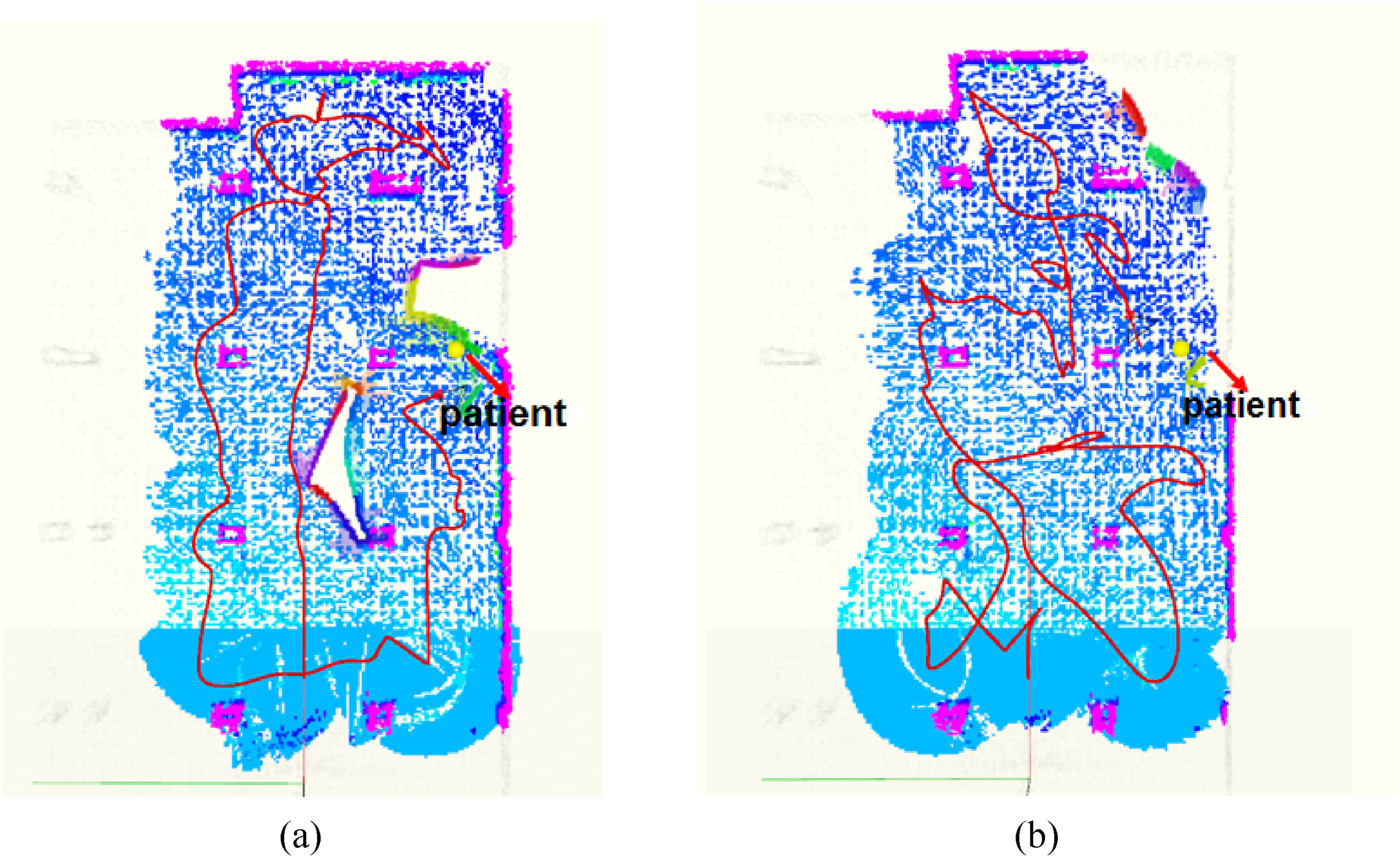
Figure 9(a) shows a UAV taking off from the white foam position in the underground garage. Figure 9(b) shows a medicine box below the UAV. Figure 9(c) shows a UAV carrying a medicine box searching and rescuing the patient in the garage below. The patient search effect using the autonomous UAV under our proposed scheme is shown in Figure 10, where the blue area represents the ground search display, the purple area represents the obstacle display, the colored area represents the uneliminated frontier during the patient search process, and the yellow dot represents the patient. The red trajectory represents the patient search path of the autonomous UAV in the underground garage.
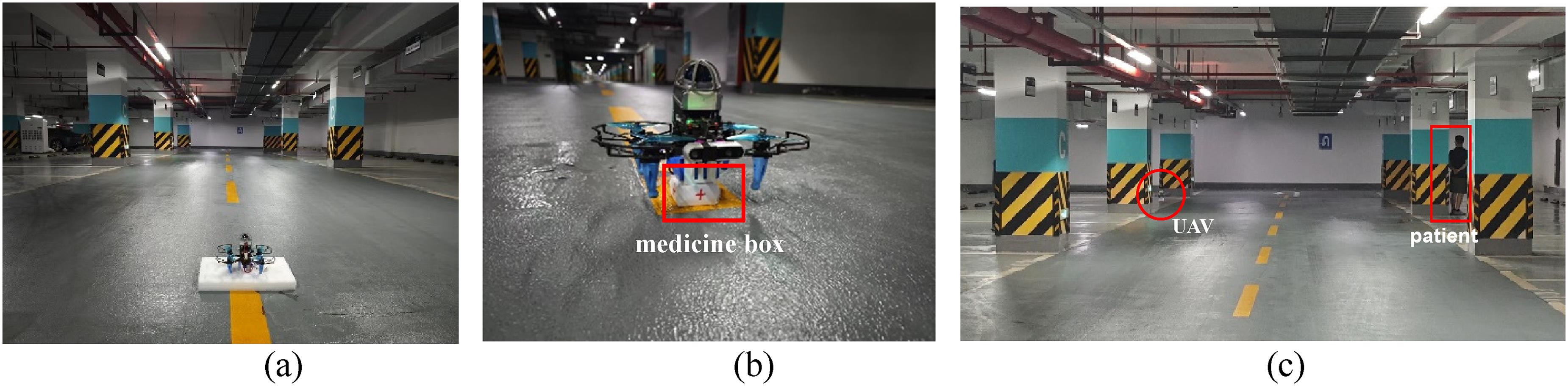
Patient search and rescue of the autonomous UAV carrying emergency medicine in the garage below. UAV: unmanned aerial vehicle.
Patient search effect of the autonomous UAV carrying emergency medicine under our proposed scheme. UAV: unmanned aerial vehicle.
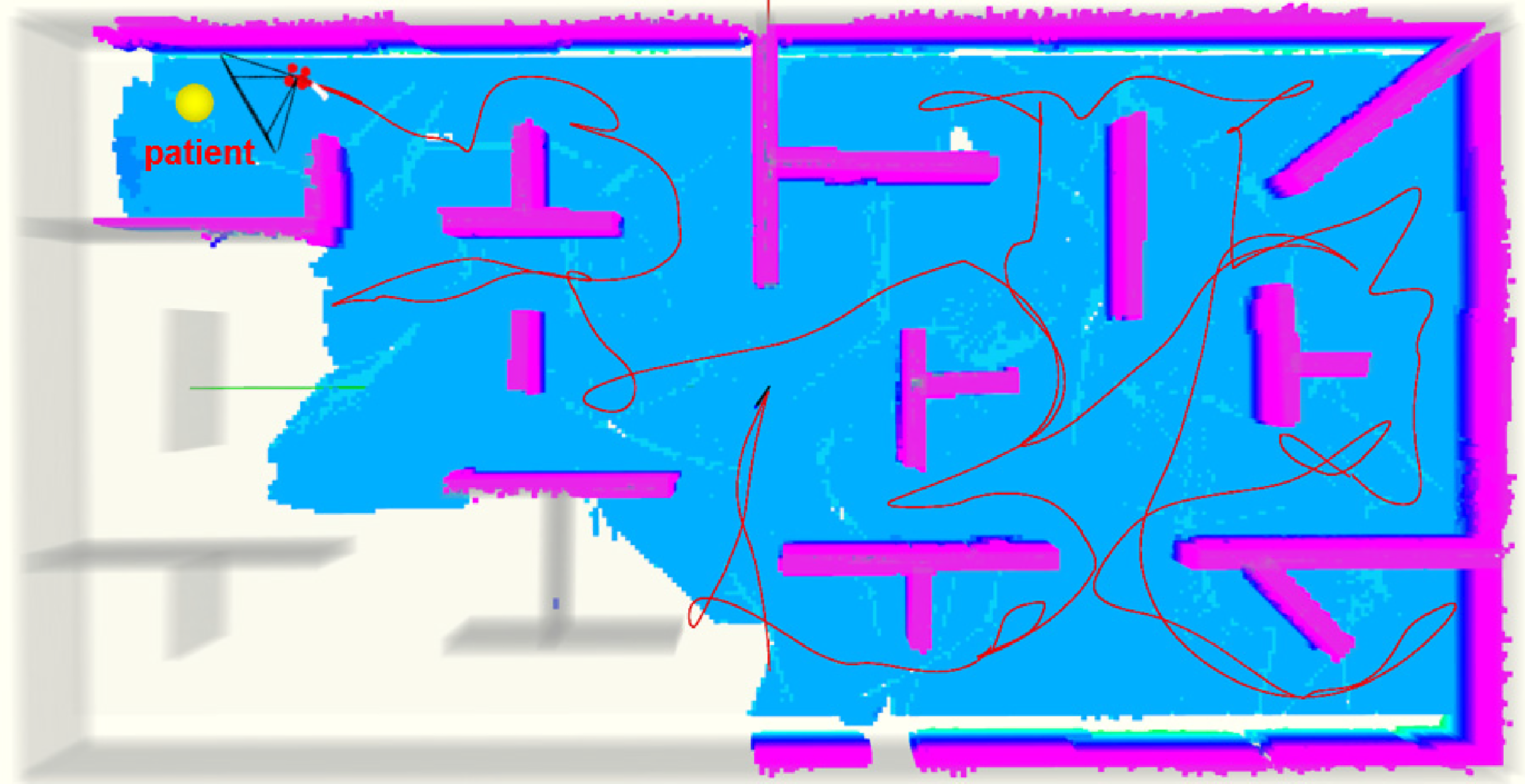
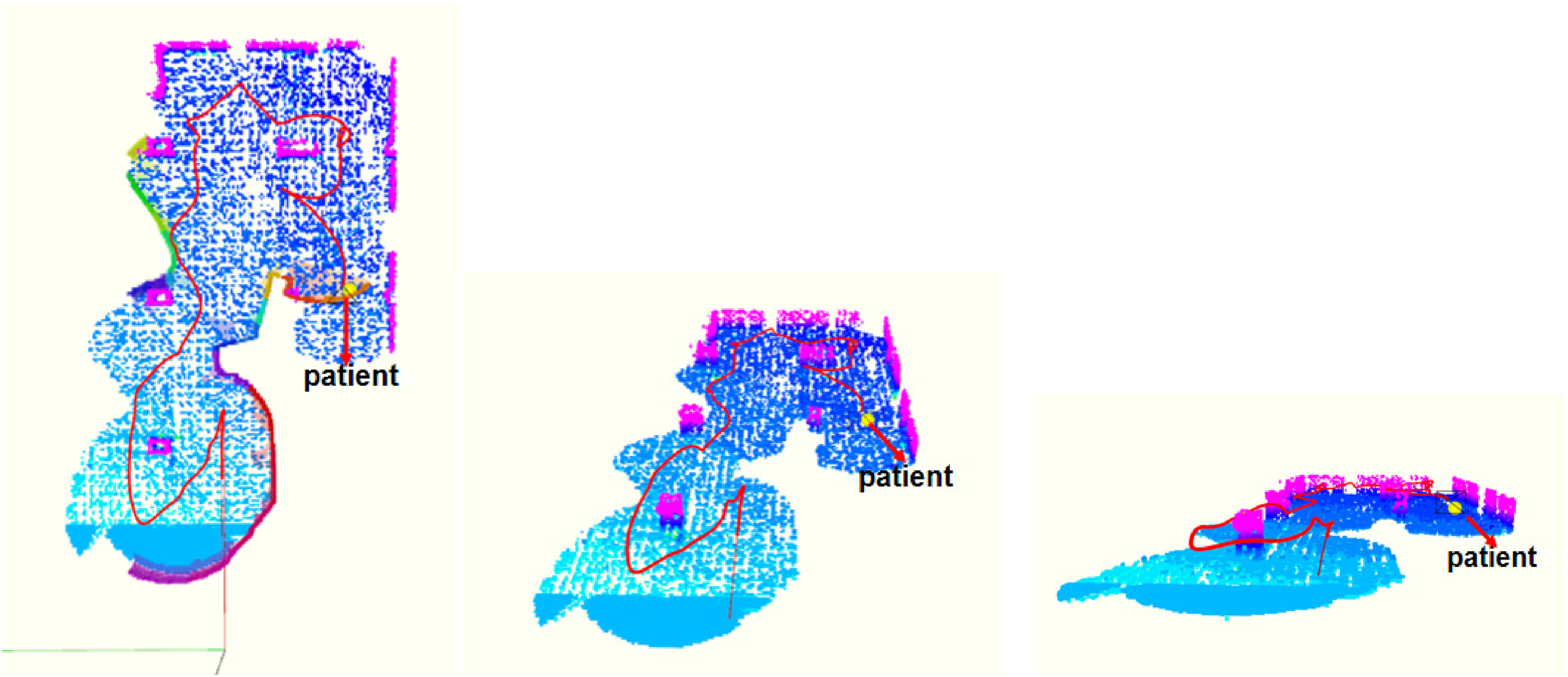
Figure 11 (a) shows the patient search effect of the autonomous UAV carrying emergency medicine under the FUEL scheme. Figure 11 (b) shows the patient search effect of the autonomous UAV carrying emergency medicine under the Aeplanner scheme. It can be seen that both the FUEL and Aeplanner schemes have duplicate and long paths during the patient search process, making it difficult to quickly rescue the patient.
Patient search effect of the autonomous UAV carrying emergency medicine under the FUEL and Aeplanner schemes. UAV: unmanned aerial vehicle.
The patient search and identification effect of the autonomous UAV carrying emergency medicine is shown in Figure 12. Figure 12 (a) shows that the autonomous UAV carrying the medicine box searches for the patient, and Figure 12 (b) shows that the autonomous UAV carrying the medicine box flies towards the patient and lands.

Patient search and identification effect of the autonomous UAV carrying emergency medicine. UAV: unmanned aerial vehicle.
Table 2 shows a patient search comparison of the autonomous UAV carrying emergency medicine in underground scenes. Our proposed scheme only takes 55.09 s to complete the patient search in the underground garage. The length of the patient search path is 68.72 m, and the average speed is 1.25 m/s. Compared with the FUEL search scheme, the length of the patient search path is shortened by 36.30%, and the patient search time is reduced by 43.11%. Compared with the Aeplanner search scheme, the length of the patient search path is shortened by 47.76%, and the patient search time is reduced by 47.06%. Through patient search experimental comparison, our proposed scheme can quickly find the patient in a confined environment, demonstrating the effectiveness and superiority of the search and rescue scheme proposed in this paper.
Patient search comparison of the autonomous UAV carrying emergency medicine in underground scenes.

UAV: unmanned aerial vehicle.
We test the delivery accuracy and delivery success rate in both simulations and real experiments. In 10 simulations, the average distance error between the medicine box and the patient is about 0.07 m, and the delivery success rate is 90%. In 10 real experiments, the average distance error between the medicine box and the patient is about 0.15 m, and the delivery success rate is 80%. The above results indicate that the proposed scheme has good feasibility.
Summary
This paper proposes an autonomous UAV-based solution for patient search and emergency medication delivery in confined spaces, with a primary focus on enhancing search efficiency through optimizing sampling viewpoint and frontier visit order. Based on whether obstacles fall within the UAV's sensor perception range, different sampling viewpoint strategies are adopted. Furthermore, according to the size of obstacles within the perception range, the yaw angle of sampling points is dynamically adjusted. This ensures that the sensor can cover more obstacles and avoid missing unsearched areas near obstacles. To address the problem of redundant back-and-forth search by autonomous UAVs, this paper proposes the priority mechanisms of two types of frontier viewpoint visit order: frontier clusters near the frontiers of unsearched areas and those within already searched areas. These two viewpoint priorities are integrated into the cost of the autonomous UAV reaching the frontier cluster, and the optimal solution is obtained by constructing an ATSP matrix. Through comparison with existing advanced search schemes in confined environments, experimental results demonstrate that the proposed patient search scheme is superior to the other two search schemes in terms of search time and search path length. In the future, we will collaborate with the demand team for emergency medication delivery to carry out the actual delivery verification, further verifying the practical applicability of the proposed scheme.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Zhejiang Traditional Medicine and Technology Program, Zhejiang Traditional Medicine and Technology Program for Young Scholar, (grant number 2026ZL0545, 2022ZQ062).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data are available from the corresponding author on reasonable request.