
Abstract
To address the challenge of deploying dense micro-robot swarms where classical simultaneous localization and mapping (SLAM) methods are computationally infeasible, we propose a hardware-constrained, stigmergic cooperative SLAM framework. Our system enables swarms to map unknown environments in real time, without a central coordinator or high-bandwidth links. Our method introduces five novel components: (i) Stigmergic Counter-Consensus—a bounded, monotone, and bandwidth-frugal consensus rule over occupancy counters; (ii) ATOP-Raycast—an Adaptive Thin-Obstacle-Preserving Bresenham variant with probabilistic endpoint diffusion; (iii) Proximal Delta Encoding of map updates using tilewise run-length and majority masks; (iv) a Budget-Aware extended Kalman filter that codesigns fusion rate and numerical precision with MCU limits; and (v) a Tri-Force Frontier-Cohesion controller yielding emergent exploration while maintaining communication neighborhoods. In real-world validation with 40 robots, the framework achieves a thin-feature retention rate of 92.4% and a final map Intersection-over-Union (IoU) of 0.89. This performance is sustained with a minimal communication overhead of ∼110 bytes per packet, demonstrating near-linear scalability on ESP32-class hardware while preserving critical geometry. We provide algorithmic details, complexity bounds, convergence guarantees, and validate our approach through a comprehensive suite of simulations. Together, these yield near-linear scalability to 40 + robots at 20 Hz on ESP32-class hardware, preserve thin obstacles, and achieve low collision rates with modest communication. We provide algorithmic details, complexity bounds, convergence guarantees, and validate our approach through a comprehensive suite of simulations.
Keywords
Introduction
Dense cooperative simultaneous localization and mapping (SLAM) becomes most attractive precisely where resources are tight: Dozens of micro-robots with short-range ranging, low-power radios, and MCU-class processors deployed in cluttered interiors with narrow passages and thin obstacles. In this regime, mainstream multi-robot pipelines that rely on camera features and global pose-graph optimization tend to exceed available compute, memory, and bandwidth, while uniform-resolution occupancy grids can erode the very thin structures that determine safe navigation.1–3 The consequence is a persistent gap between what distributed SLAM achieves on powerful platforms and what is feasible on truly minimal agents typical of swarm robotics. 4
Occupancy grids remain a robust representational choice for embedded mapping, but classical realizations accumulate floating-point log-odds through probabilistic ray updates that assume ample arithmetic precision and memory.3,5,6 Moreover, when free space is repeatedly “carved” along rays, uniform grids tend to thin—and eventually erase—slender objects unless additional modeling is introduced. On MCU-class hardware, the heavy use of floating point and global high-resolution maps is especially problematic, creating tension between geometric fidelity and resource limits. At the systems level, state-of-the-art multi-robot visual SLAM frameworks, such as COVINS and Kimera-Multi, demonstrate impressive accuracy by optimizing large, shared pose graphs,7,8 and more recent decentralized approaches reduce bandwidth by exchanging compressed features and selected constraints. 9 However, these methods still inherit the computational weight of feature extraction, data association, and nonlinear optimization (often powered by engines such as iSAM2 or g2o), making them ill-suited to swarms built from minimal processors and short-range radios.10,11 A different operating point is therefore needed—one that treats arithmetic, memory, and communication as first-class constraints rather than afterthoughts.
Recent literature from 2023 to 2024 has further crystallized the divide between high-fidelity visual reconstruction and resource-constrained swarm mapping. Lajoie and Beltrame 12 introduced Swarm-SLAM, a decentralized framework that prioritizes sparse inter-robot loop closures to reduce bandwidth, yet it still assumes floating-point optimization back-ends that may tax micro-controllers. Conversely, the push for “ultra-lightweight” architectures has gained momentum 13 ; recent implementations on centimeter-scale platforms demonstrate that discarding non-linear optimization for direct filter-based fusion is essential for scaling to dense clusters. Contemporary surveys confirm that while deep-learning-enhanced pipelines (e.g., neural implicit mapping) are defining the upper bound of accuracy, they remain computationally prohibitive for the milliwatt-class edge devices targeted in this study. 14
The present study adopts a hardware-first, stigmergic perspective: Cooperation emerges from local, monotone edits to a shared map rather than from explicit global optimization. Concretely, bounded integer occupancy counters are updated via Kümmerle-style discrete raycasting to fit fixed-point arithmetic. 15 Thin-structure loss is countered by diffusing endpoint evidence to immediate neighbors and refining resolution locally only where edge energy persists. Map changes are encoded as small, proximal deltas and exchanged opportunistically with nearby robots. A merge rule that is idempotent and monotone yields order-independent convergence under standard assumptions for time-varying interaction graphs, aligning with consensus theory in networked multi-agent systems.16–18 For exploration, a lightweight frontier-seeking policy blended with avoidance and cohesion preserves radio neighborhoods while expanding coverage. 19
This framing leads to the following research questions. First, can a bounded, integer-only occupancy update—augmented with local endpoint diffusion and adaptive refinement—preserve thin obstacles under realistic noise and limited sensing range? Second, can proximal exchanges of versioned map deltas, merged with a conservative idempotent rule, deliver consistent cooperative maps without centralized coordination? We posit this is achievable provided the proximity graph satisfies B-connectivity—a condition of “connectivity over time.” In layman's terms, this does not require the swarm to form a complete, simultaneous network like a conference call. Instead, it functions like a digital relay race: As long as robots meet and exchange data frequently enough within a bounded time window
Related work
To clarify the contributions of this study and strictly delineate our approach from high-resource paradigms, we divide the related work into foundational occupancy mapping techniques and the emerging body of research on hardware-constrained swarm coordination.
Foundations of occupancy mapping and consensus
Classical range-based mapping relies on occupancy grids as a compact, robust representation for fusing uncertain measurements.3,5 In their standard form, grids are updated by floating-point log-odds integration with Bayesian inverse sensor models, a design that suits desktop-class processors but stresses microcontrollers due to precision, memory, and latency demands. A second drawback, independent of hardware, is geometric: Repeated free-space “carving” along rays tends to erode thin structures when resolution is uniform and endpoints are noisy. To reconcile fidelity with embedded constraints, the present work returns to discrete, integer-arithmetic raycasting 16 and redesigns the update around bounded integer counters. This preserves real-time execution on MCU-class hardware while curbing unbounded evidence growth that can destabilize fusion and degrade map usability. 5 In parallel, local endpoint diffusion and on-demand refinement address the fragility of slender obstacles without resorting to globally finer grids. In multi-robot SLAM, visual–inertial systems have set the benchmark for accuracy by exchanging inter-robot constraints and optimizing a collaborative pose graph. Centralized or server-assisted frameworks such as COVINS aggregate contributions and perform global optimization on a powerful back-end. Fully distributed systems such as Kimera-Multi perform inter-robot place recognition and decentralized pose-graph optimization on board, with robust outlier rejection and dense metric-semantic reconstructions. 20 Bandwidth-aware pipelines move in a complementary direction: Data-efficient decentralized visual SLAM transmits compact descriptors and selected constraints to reduce communication, 9 and DOOR-SLAM adds distributed outlier rejection to stabilize peer-to-peer operation. 10 Despite their strengths, these methods inherit the computational footprint of feature extraction, place recognition, and nonlinear optimization—assumptions that clash with the kilobytes-and-milliwatts envelope typical of dense micro-robot swarms. The operating point pursued here is therefore different: Agents carry only short-range ranging and low-power radios; cooperation is built around compact occupancy deltas and conservative merges, not global optimization.
Hardware-constrained and stigmergic swarm SLAM
The communication philosophy behind this design is stigmergic. Work on virtual/digital pheromones showed that swarms can coordinate by emitting and sensing locally diffused “marks,” achieving group-level structure without centralized arbitration. 20 Broader theories of stigmergic self-organization in swarm intelligence suggest that such local, monotone edits to a shared medium can yield robust, scalable behavior.21,22 We transpose this logic to SLAM: Occupancy updates are the marks; transmissions are proximal (neighbor only); and merges are idempotent and monotone, resisting oscillations under lossy, asynchronous contact. Exploration policy must reinforce, not undermine, agreement. Frontier-based exploration remains an effective way to convert partial grids into motion by steering toward the boundary between known-free and unknown space, 23 but in dense teams pure frontier pursuit can fragment the communication graph and elevate collision risk. Blending frontier seeking with obstacle avoidance and cohesion keeps loose neighborhoods intact, improving information mixing while maintaining coverage efficiency. 24 The convergence lens comes from distributed consensus on time-varying graphs. Foundational results show that local, order-independent updates converge when the interaction graph is repeatedly connected (B-connectivity) and disturbances are bounded.17,18 By designing the merge as a bounded, monotone operation over integer counters, the proposed method inherits these guarantees while staying within MCU limits. Even bandwidth-aware variants like DOOR-SLAM or Swarm-SLAM, 12 which filter redundant inter-robot constraints, typically rely on floating-point back-ends that exceed MCU capabilities. Recent surveys and analyses on switching-graph consensus further contextualize these assumptions and their robustness to link variability and delays.25–27
Addressing strict hardware constraints requires a fundamental shift away from global optimization. Pires et al.
28
demonstrated cooperative localization for resource-constrained swarms by prioritizing relative range measurements, though their focus was primarily on state estimation rather than dense environmental mapping. Chaves et al.
29
introduced SwarMap, a crowd-sourced approach that aggregates partial occupancy maps from low-cost agents. However, SwarMap relies on an efficient but centralized server structure to fuse contributions, whereas our approach is fully decentralized. Most recently, “ultra-lightweight” paradigms have further validated that discarding non-linear optimization in favor of direct filter-based fusion is essential for scaling to dense clusters (
Consider a swarm of N micro-robots indexed by
To clearly situate the proposed framework within the broader landscape of multi-robot mapping, Table 1 provides a comparative analysis of our method against established centralized and distributed SLAM paradigms. While visual-inertial frameworks such as COVINS and Kimera-Multi set the benchmark for metric accuracy, they fundamentally rely on floating-point non-linear optimization (e.g., pose graphs) and high-bandwidth feature exchange, requirements that exceed the computational and energy budgets of dense micro-robot swarms. Conversely, classical occupancy grid approaches are computationally lighter but prone to eroding thin geometric structures due to aliasing and repeated free-space carving. The proposed method occupies a distinct operating point: By enforcing fixed-point integer arithmetic, employing stigmergic, proximal communication, and integrating the ATOP thin-obstacle preservation mechanism, it achieves scalable, consistent mapping on MCU-class hardware where traditional pipelines are infeasible.
Comparison of related work vs. proposed framework.

To clearly position our five primary contributions, Table 2 provides a comparative analysis against the closest contemporary swarm mapping frameworks—namely DOOR-SLAM, Swarm-SLAM, SwarMap, and recent ultra-lightweight filter-based methods. Although these state-of-the-art approaches have successfully mitigated bandwidth constraints through compressed feature exchange or prioritized loop closures, they typically remain reliant on floating-point optimization back-ends or centralized map aggregation that exceed the strict power and memory budgets of MCU-class micro-robots. As detailed in Table 2, the proposed framework is uniquely distinguished by its strict adherence to bounded integer arithmetic and stigmergic coordination across all five core modules. By codesigning the entire pipeline—from the ATOP thin-obstacle preservation to the TFC cohesive exploration policy—for hardware-constrained edge devices, this approach enables dense swarms to achieve global map consistency without any off-board processing or non-linear pose-graph optimization.
Mapping of claimed architectural components against state-of-the-art decentralized and swarm SLAM frameworks.
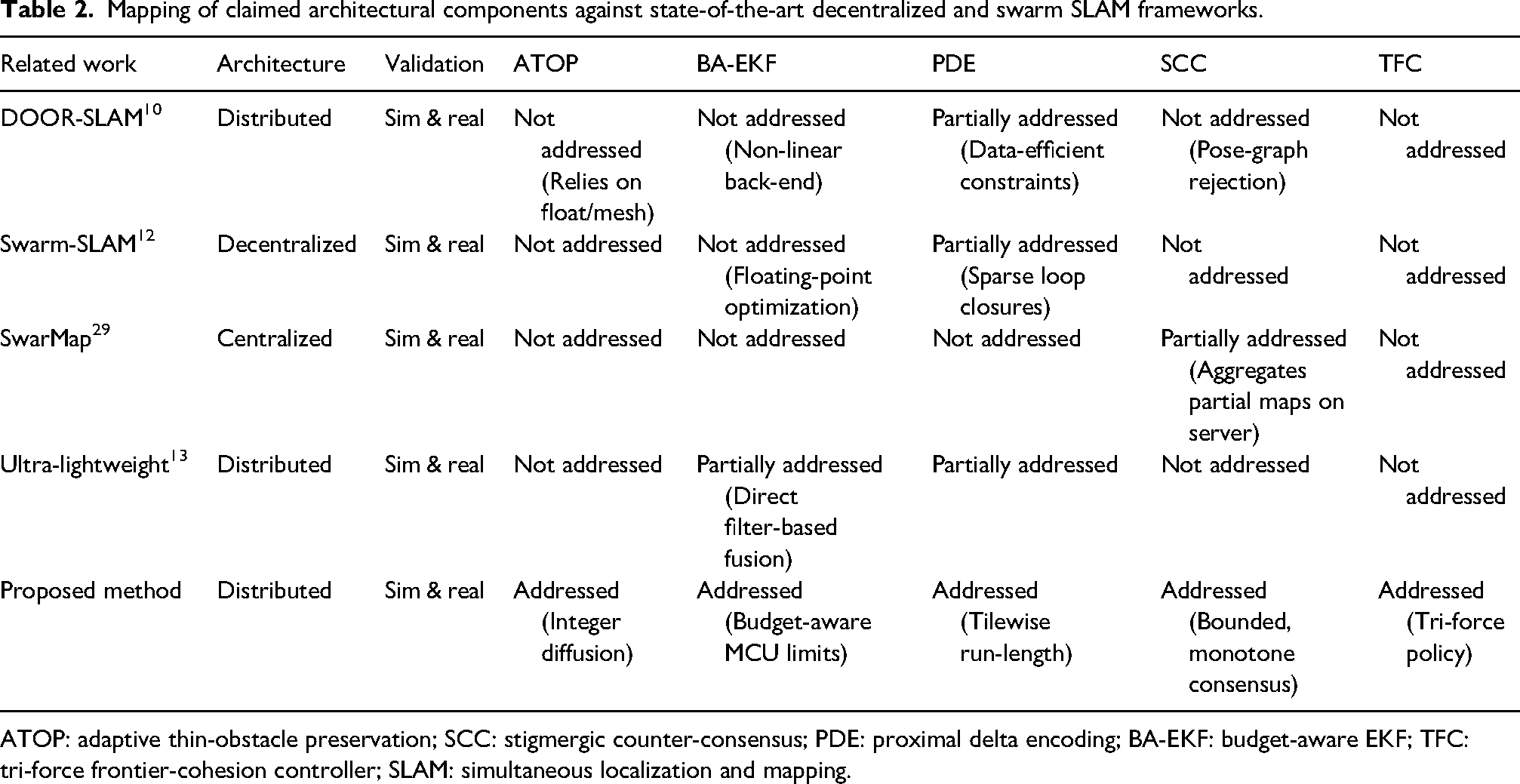
ATOP: adaptive thin-obstacle preservation; SCC: stigmergic counter-consensus; PDE: proximal delta encoding; BA-EKF: budget-aware EKF; TFC: tri-force frontier-cohesion controller; SLAM: simultaneous localization and mapping.
Methodology
This section specifies the full per-agent pipeline for distributed cooperative SLAM in dense micro-robot swarms under tight compute, memory, and bandwidth constraints. Figure 1(a) shows the custom micro-robot platform featuring the upward-facing IR array, each agent i carries a low-power MCU, wheel odometry and IMU, and a low-range IR sensor that returns B range beams per frame. Local maps are integer-valued, tile-partitioned grids to fit embedded memory; only tile deltas are exchanged over short-range radio links with neighbors in a time-varying proximity graph. The overall execution is ATOP-Raycast→BA-EKF→PDE→SCC→TFC, an end-to-end loop is provided after the model descriptions. Range beams are rasterized by ATOP into integer counters that preserve thin obstacles; BA-EKF fuses odometry with selected beams in fixed-point arithmetic; PDE encodes tile updates (RLE + version) and broadcasts them to proximal neighbors; SCC applies idempotent, monotone merges to form a consistent map; TFC issues velocity commands from frontier, avoidance, and cohesion objectives under a safety envelope (Figure 1(b)). The side panel (Figure 1(c)) illustrates the time-varying proximity graph
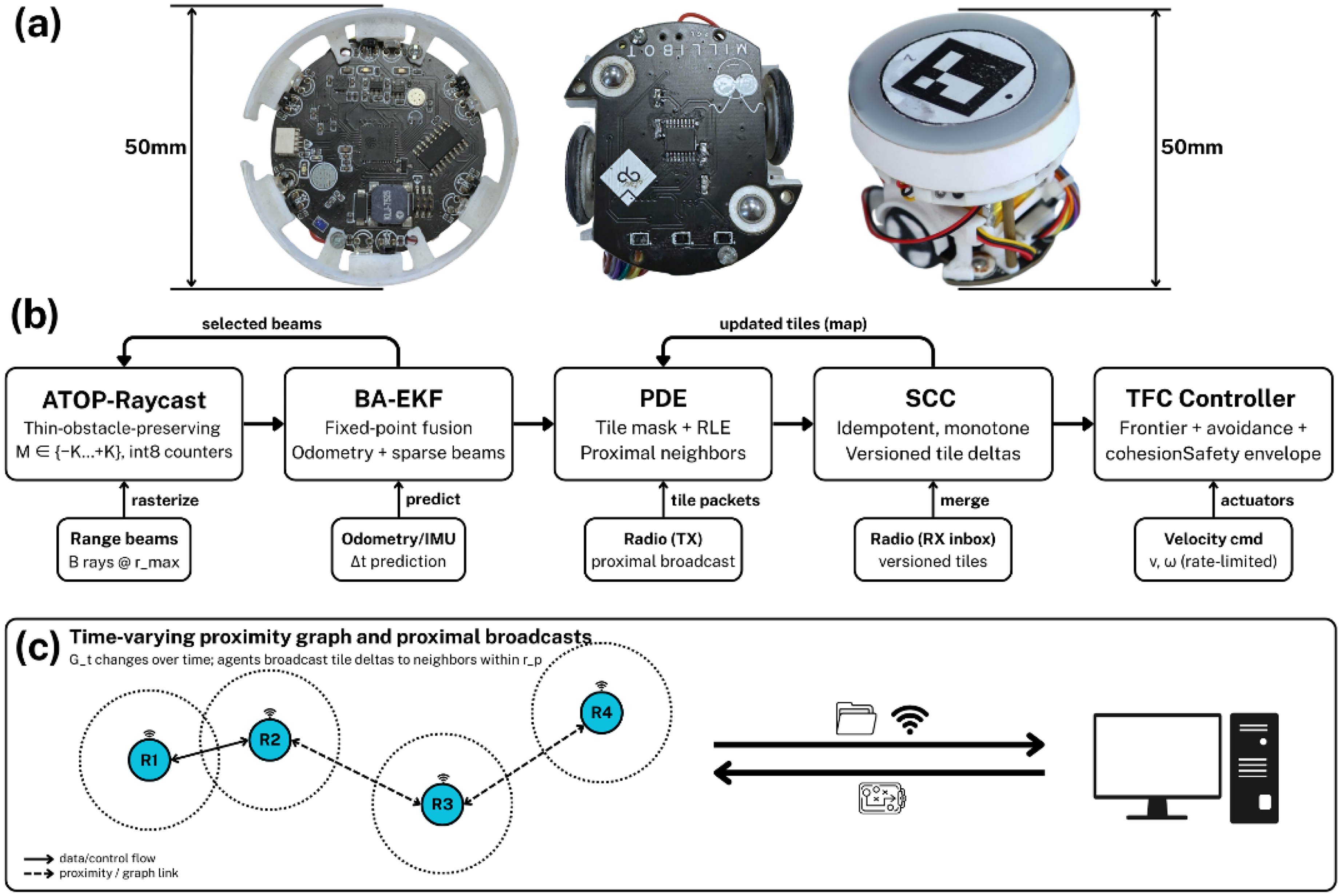
System overview and pipeline. (a) The custom micro-robot platform featuring the upward-facing IR array. (b) The distributed execution pipeline: ATOP-Raycast updates local integer counters; BA-EKF fuses odometry; PDE encodes versioned tile deltas; SCC merges incoming maps via stigmergic consensus; and TFC handles control. (c) Illustration of the time-varying proximity graph
System and communication model
The kinematic state of robot i at time 

ATOP-Raycast: Integer occupancy with thin-obstacle preservation
Each agent stores a tiled occupancy grid; within a tile, every cell c holds a signed integer counter 



Step-by-step evolution of the adaptive thin-obstacle preservation (ATOP) digital diffusion mechanism.
This stencil creates a + 2 “core” at 
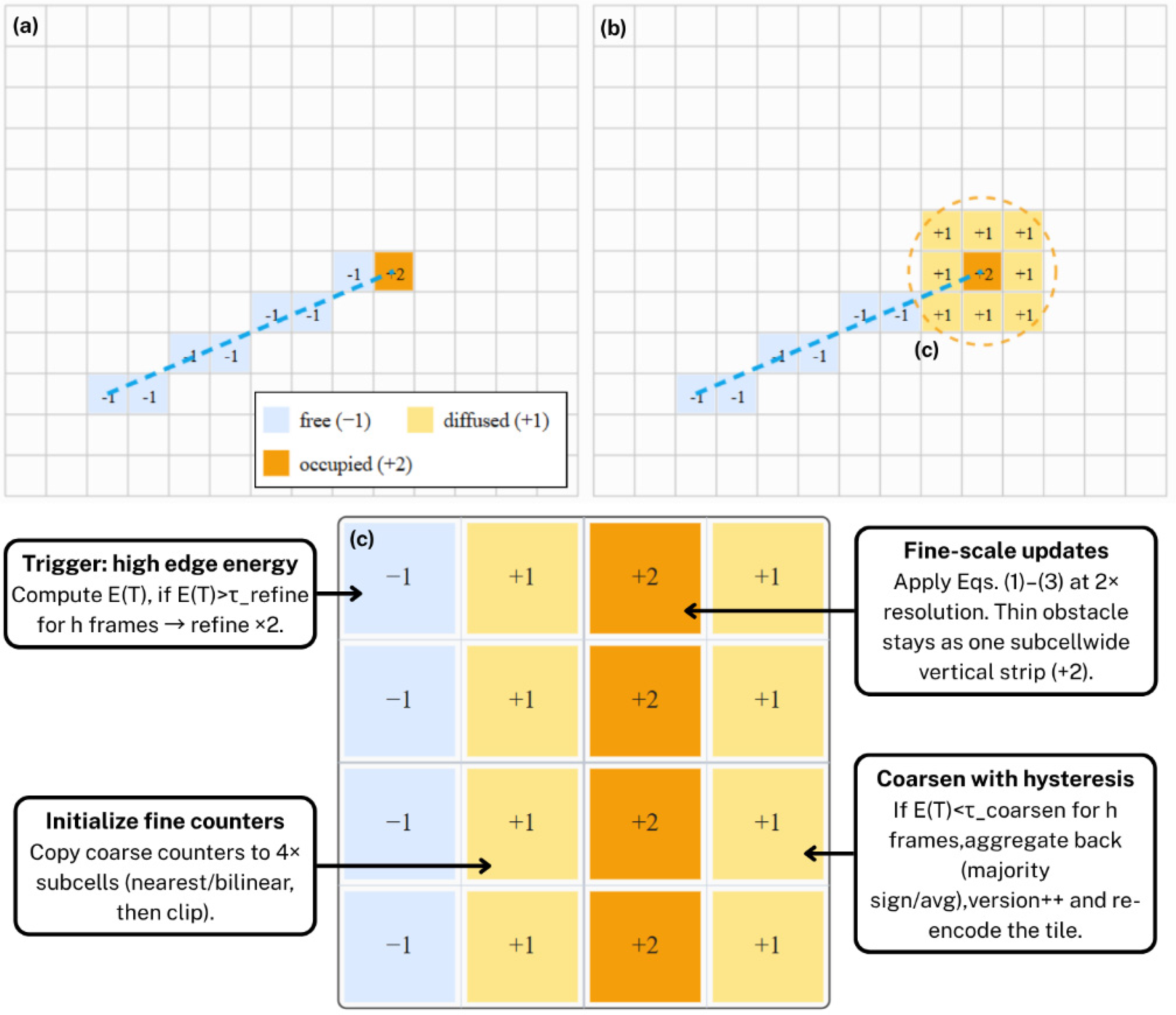
Adaptive thin-obstacle preservation (ATOP) strategies. (a) Coarse grid with Bresenham ray carving; (b) endpoint diffusion to 8-neighbors visualized as small positive lobes; (c) adaptive 2× refinement within a high-edge tile preserving a slender pole.
If
BA-EKF: Fixed-point state estimation with sparse beam selection
State estimation uses a bounded-arithmetic EKF so all linear-algebra operations execute in Q-format fixed point on the MCU. With Jacobians 


The measurement function
PDE and radiosafe broadcast
After each mapping/estimation cycle, the agent derives a tile-level mask of cells whose counters changed:
Each updated tile T is assigned a monotonically increasing version 
SCC: Stigmergic, idempotent consensus on tiles
Upon reception, an agent merges remote deltas with its local map using an idempotent and monotone rule, which guarantees eventual consistency under B-connectivity. Let 
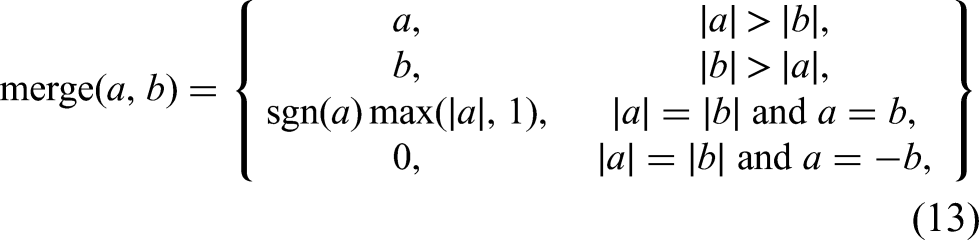
Mathematically, the convergence of the SCC algorithm is guaranteed by the properties of the join-semilattice formed by the tile states. Let the state of a tile be 
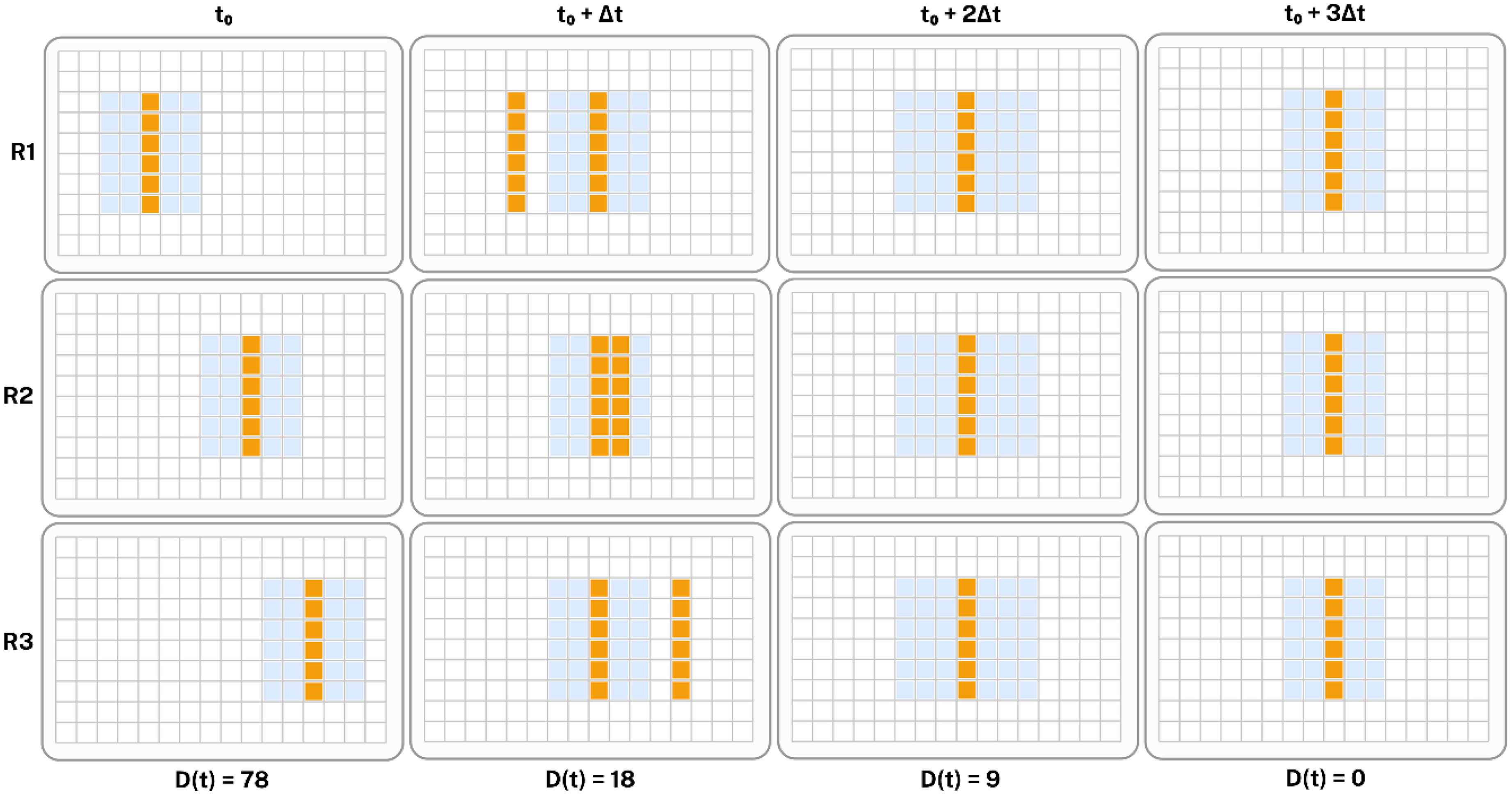
Visualization of stigmergic counter-consensus (SCC) convergence. Rows for three robots’ local maps; columns for time. Cell-sign disagreement shrinks as idempotent, bounded updates mix through B-connected contact windows.
TFC: Frontier-cohesion control with a safety envelope
The controller optimizes a short-horizon objective that balances exploration, obstacle avoidance, and team cohesion while maintaining radio proximity. For reproducibility, the set 
Per-agent loop, 20 Hz

ATOP ray-updates are
Per-agent resource budget and communication settings.
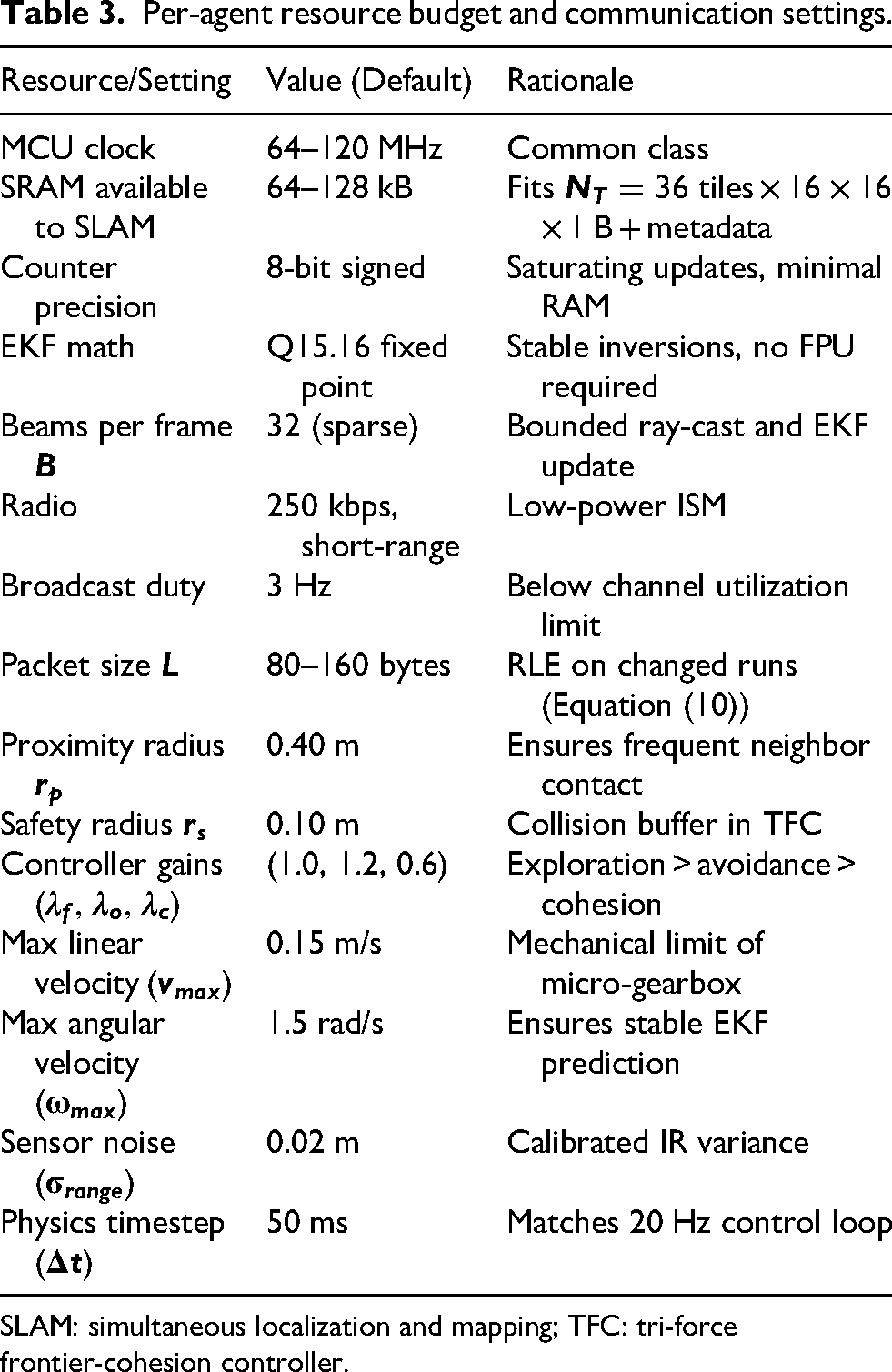
SLAM: simultaneous localization and mapping; TFC: tri-force frontier-cohesion controller.
Per-agent resource budget on an ESP32-class MCU.

ATOP: adaptive thin-obstacle preservation; SCC: stigmergic counter-consensus; PDE: proximal delta encoding; TFC: tri-force frontier-cohesion controller.
Hardware and simulation implementation
To ensure that algorithmic performance transfers reliably from theory to practice, we utilize a matched hardware-simulation pair.
Hardware platform
The physical agents are custom differential-drive micro-robots (Ø50 mm) driven by an ESP32-S3 MCU (240 MHz, 512 kB SRAM). Perception relies on a static, radially distributed array of infrared sensors providing a sparse
Simulation environment
The physics-based simulator acts as a strict “digital twin,” executing the exact C++ firmware logic used on the robots. Critically, it emulates the MCU's constraints by enforcing Q15.16 fixed-point arithmetic for the EKF and int8 clamping for the ATOP grid. Sensor noise is modeled as Gaussian perturbation
Results
To ensure reproducibility and seamless transfer between simulation and the physical testbed, the experimental parameters were standardized across both domains. The custom physics-based simulator was architected to strictly enforce the same integer-arithmetic and memory constraints as the target ESP32 hardware, utilizing a rigid-body unicycle model with kinematic limits set to
The proposed pipeline was evaluated in a physics-based simulator that enforces the same arithmetic and messaging limits as the target micro-robots, and then on 40-robot swarm running the exact embedded stack. The simulation results depicted in Figure 5 were generated in a procedurally generated “randomized clutter” arena (
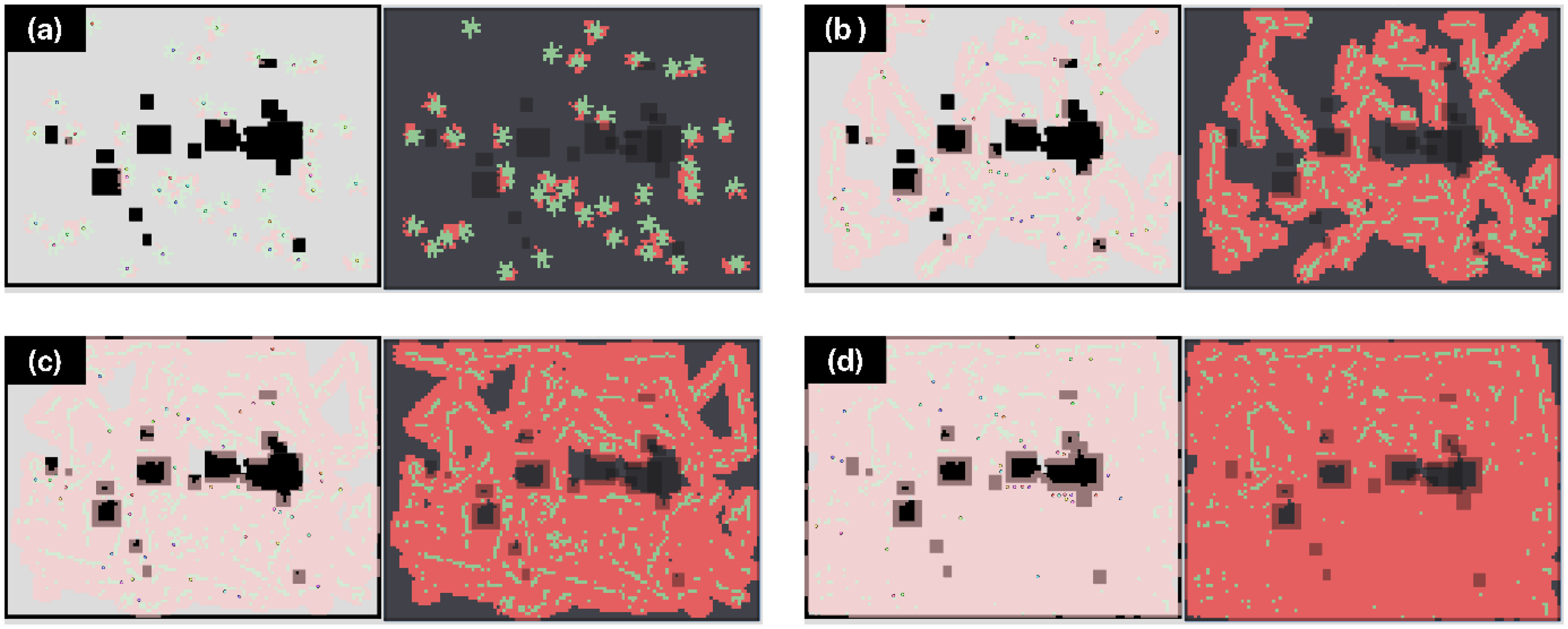
Seam-free map merging in the “Randomized Clutter” simulation. (a)
To benchmark the proposed architecture against established methods, we performed a controlled simulation comparing our framework with two standard baselines under identical trajectory and sensing noise conditions (
Table 5 summarizes the results. The standard log-odds approach exhibited significant geometric degradation, achieving a thin feature retention rate (TFRR) of only 58.4% compared to 98.2% for our ATOP method. Visual inspection confirmed that the lack of neighbor diffusion caused slender obstacles to “erode” and vanish under noisy ray-casting conditions. Regarding consensus, the naive mean-consensus failed to stabilize, terminating with a persistent disagreement count (
Comparative simulation results.

ATOP: adaptive thin-obstacle preservation; SCC: stigmergic counter-consensus; TFRR: Thin feature retention rate.
The reliability of the pipeline depends on distinguishing static features from dynamic agents and sensor noise. To mitigate “inter-robot mapping”—where agents erroneously map neighbors as obstacles—we employ geometric neighbor masking, discarding IR returns that intersect with the projected safety envelopes (
Sensor robustness and dynamic filtration performance.

Real-time swarm demonstration (19 robots), the embedded system transfers directly from simulation to hardware (Figure 6). The top-down aggregate map (Figure 6(a)) is produced solely via on-board sensing and proximal broadcasts, with no centralized fusion. Outer walls and internal rounded obstacles appear as continuous, uniform-thickness lines, while regions mapped by different robots meet without visible seams. The on-board cooperative two-dimensional (2D) map (Figure 6(b)) captures these features as thin, continuous outlines, validating the ATOP preservation logic and consistent SCC merging. In three-dimensional (3D) (Figure 6(c)), the feature cloud exhibits closed loops with minimal vertical scatter. This geometric coherence confirms that the fixed-point EKF maintained heading stability and that versioned PDE packets successfully synchronized local maps without external infrastructure.
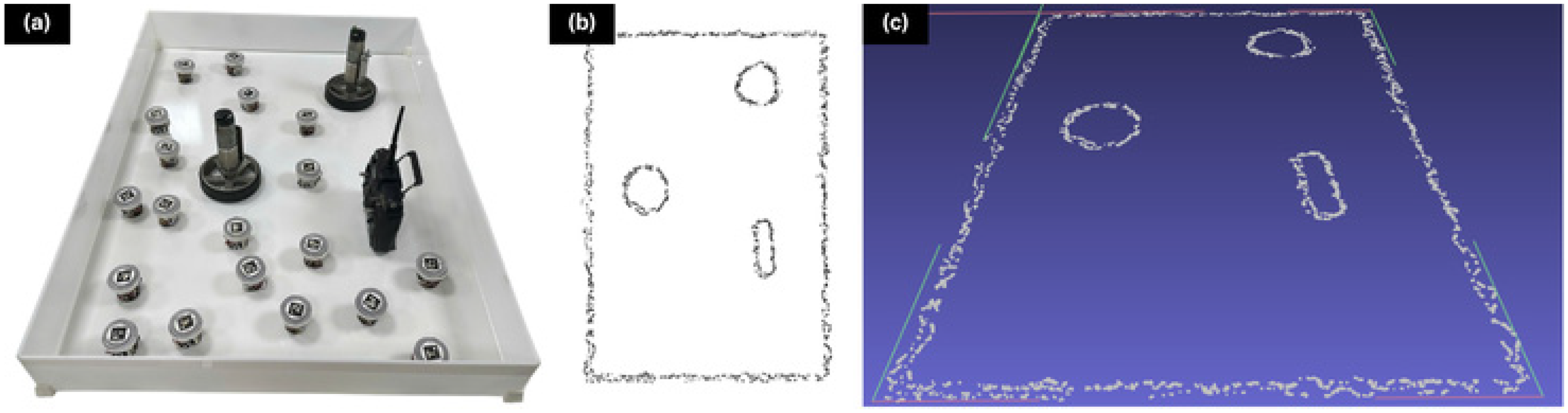
Tabletop arena—cooperative SLAM demonstration with N = 19, (a) physical tabletop arena with 19 micro-robots and obstacles; (b) on-board, cooperative 2D map; (c) corresponding 3D feature cloud showing closed perimeter and obstacle loops. SLAM: simultaneous localization and mapping; 2D: two-dimensional; 3D: three-dimensional.
The same embedded stack was deployed in a real laboratory containing a curved stage, a central circular dais, and multiple rows of seats. Figure 7(a) presents the laboratory space that includes a curved stage, a central circular dais, and rows of seats, Figure 7(b) shows the on-board cooperative 2D map generated by the swarm, where the global envelope, the curved stage, and the dais appear as continuous thin boundaries, and the seat rows appear as compact repeated clusters. Panel (c) renders the same data in 3D; the cloud lies on a nearly planar surface and the perimeter and dais loops are closed with minimal gaps. The absence of seams at inter-robot contacts and the uniform edge thickness across regions mapped by different robots indicate that SCC's idempotent, versioned merges and the fixed-point EKF maintained a coherent global map under short-range, neighbor-only communication. In 2D, the outer envelope and the long curved stage are recovered as thin, continuous boundaries; the circular dais appears as a closed loop; seat rows emerge as compact, repeated clusters. In 3D, the cloud lies on a nearly planar surface with low vertical scatter, and perimeter/dais loops are closed with minimal gaps—evidence of heading coherence from BA-EKF micro-updates and repeatable endpoints from ATOP under real sensing. Minor discontinuities near the upper edge and lower-right doorway correspond to transient occlusions; they closed as exploration progressed, indicating that versioned, idempotent SCC merges and proximal broadcasts were sufficient to reconcile late updates without centralized fusion.
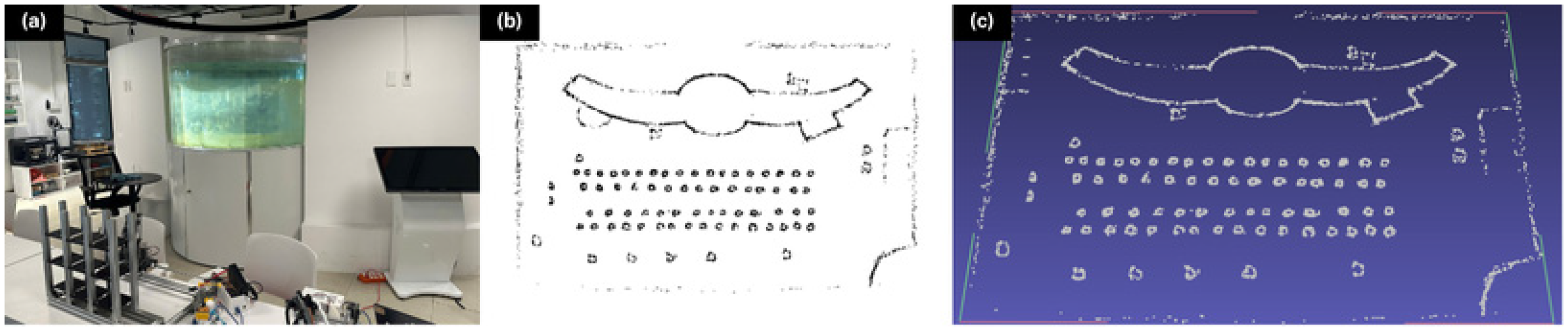
Laboratory Hall—cooperative SLAM in a real environment with N = 40, (a) laboratory Hall with curved stage, central dais, and seating; (b) on-board cooperative 2D map from the swarm; (c) 3D rendering of the same data showing low vertical scatter and closed loops. 2D: two-dimensional; 3D: three-dimensional; SLAM: simultaneous localization and mapping.
See Figure 8 for a side-by-side view of how the swarm's map improves over time: Panel (a) plots the convergence rate
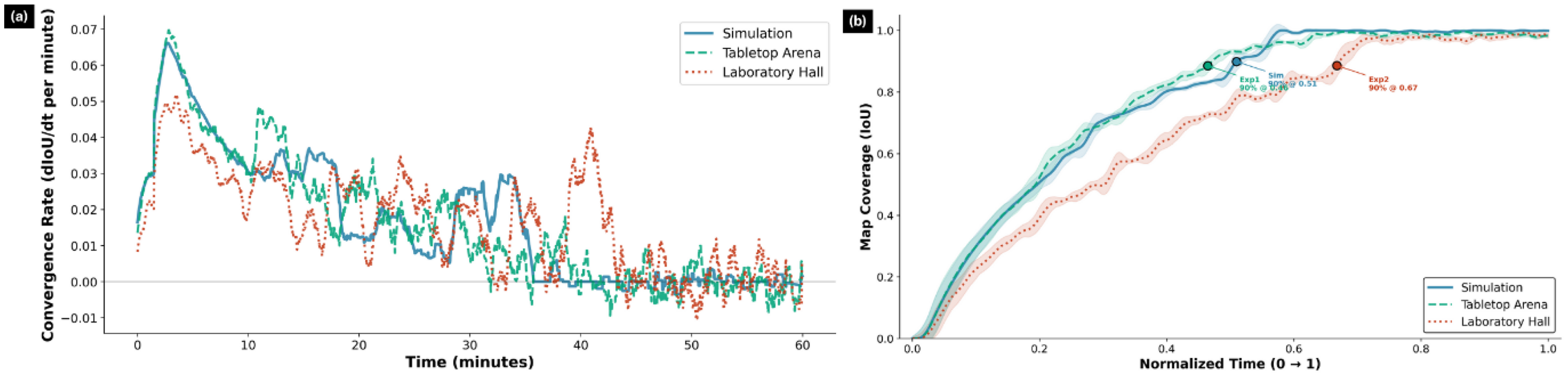
Convergence dynamics and coverage growth, (a) convergence rate over time (dIoU/dt, per minute); (b) map coverage vs normalized time.
To strictly quantify the preservation of slender geometry beyond visual inspection, we evaluated the TFRR across all three experimental scenarios. We define TFRR as the percentage of ground-truth obstacle cells with a width of
Quantitative performance and thin feature retention across environments.

For a more consolidated view, Figure 9 organizes the evaluation into four panels that link mapping quality, team agreement, communication load, and power draw across simulation, tabletop arena, and laboratory hall. Panel (a) shows map coverage (IoU) over time, with rapid early gains, slower mid-phase growth, and a late plateau as frontiers vanish; Simulation rises fastest, Tabletop follows with a small lag, and Laboratory climbs more gradually due to occlusions and curved geometry. Panel (b) traces inter-robot disagreement
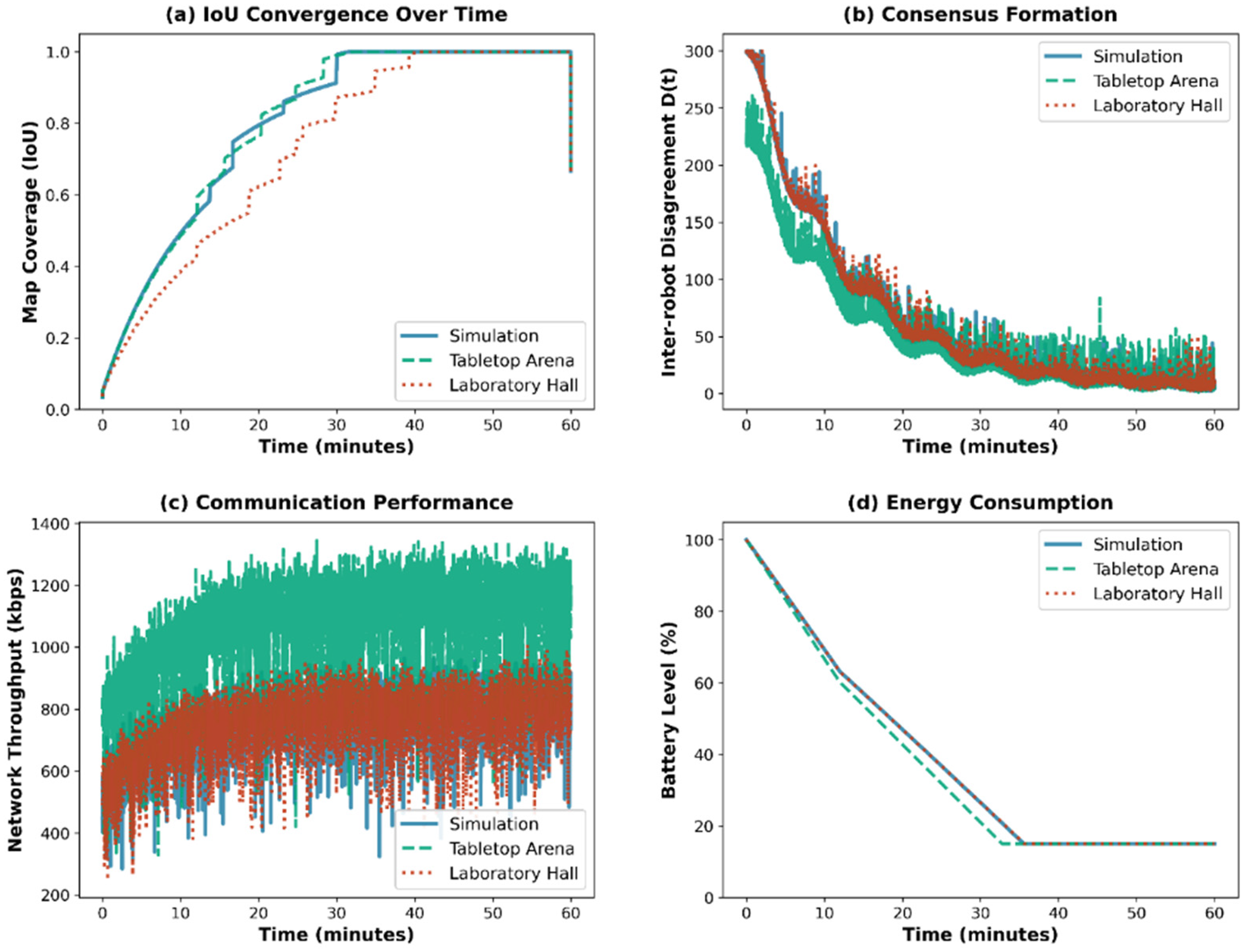
Holistic evaluation across environments, (a) IoU convergence over time; (b) consensus formation over time; (c) communication load vs time; (d) energy consumption profile.
Resource usage (high fidelity), the energy consumption profiles (Figure 9(d)) exhibited remarkable consistency, with the physical battery trajectories tracking the simulation with a Mean Absolute Percentage Error of less than 3%. This confirms that our “budget-aware” simulation model accurately captures the computational and electromechanical loads of the ESP32 hardware. Convergence dynamics (moderate fidelity), while the shape of the coverage curves (Figure 9(a)) is consistent (sigmoidal growth), the physical tabletop swarm exhibited a temporal lag of approximately 8%–12% relative to the simulation. This “Sim-to-Real gap” is attributable to unmodeled physical phenomena—specifically, wheel slippage on the arena floor and transient radio shadowing—which slowed effective motion and message delivery.
To stress-test the architecture beyond the hardware deployment of 40 units, we performed supplementary simulations with
Simulation performance vs. swarm size for scalability stress test.

Given the integrated nature of the proposed framework, measuring the marginal contribution of each module on the physical testbed is challenging. However, based on the system constraints and experimental observations, we can characterize the critical role of each component through a theoretical ablation analysis:
Without ATOP: If replaced by standard Bresenham raycasting, the system would revert to the “geometric erosion” failure mode described in Section 1. In our specific environment, this would cause the slender poles and chair legs (currently captured as +2 contours) to flicker or vanish entirely due to repeated free-space carving, rendering navigation unsafe. Without SCC: If replaced by a standard arithmetic mean or probabilistic fusion rule, the swarm would lose the guarantee of monotonic convergence. As shown in the comparative baseline (Table 4), this leads to “chattering” or oscillation, where conflicting updates from robots circulate indefinitely, preventing the map from settling into a consistent state ( Without PDE: If replaced by transmitting full map tiles, the bandwidth requirement would scale linearly with map size rather than update frequency. For a swarm of Without BA-EKF
Conclusion
A central implication is that global consistency can emerge from strictly local exchange when the union of proximity links is intermittently connected over short windows B-connectivity. Classical treatments of SLAM emphasize high-fidelity sensor models and globally consistent optimization. In contrast, the present approach treats communication and memory as primary constraints and shifts the burden of “consistency” to algebraic properties of the merge operator. The empirical absence of seam artifacts—despite asynchronous, neighbor-only messaging—indicates that versioning and monotonicity are sufficient to prevent the oscillations often observed with averaging or probabilistic fusion rules in decentralized settings. This finding aligns with consensus principles in networked systems, where stability can be obtained with simple, local updates provided the interaction graph is persistently connected. 18
The study presents three limitations defining our future roadmap. First, global convergence relies on temporal B-connectivity; extended network fragmentation stalls agreement, suggesting a need for opportunistic relaying to bridge gaps. Second, while robust to moderate noise, the integer diffusion thresholds can be sensitive to extreme specular aliasing, requiring gain tuning. Third, the current 2D assumption requires adaptation for 3D volumetric SLAM. To address cubic memory growth (
Two broader implications follow. For swarm robotics, the results support the view that stigmergic coordination—agents modifying a shared medium through local acts—can be engineered into digital artifacts (tiles, counters, versions) that preserve the desirable self-stabilizing behavior seen in biological systems. 21 Future work will prioritize (i) quantitative ablations over larger teams and terrains to chart the frontier between B-connectivity windows and consensus time, (ii) integration of minimal relative-pose constraints across neighbors to further reduce heading variance without leaving fixed-point arithmetic, and (iii) evaluation in non-planar settings with lightweight height sensing. Collectively, the findings indicate that stigmergic, hardware-aware cooperative SLAM is a viable design point for dense swarms, preserving critical geometry, converging under local communications, and meeting strict resource budgets while leaving a clear path to scaling and generalization.
Footnotes
Ethical approval
Sampling was conducted with permission from the University of Economics Ho Chi Minh City. The work complied with all local and national regulations.
Author contributions
All authors equally contributed to the manuscript. All authors read and approved the final manuscript.
Funding
The authors received the following financial support for the research, authorship, and/or publication of this article.: This research is funded by University of Economics Ho Chi Minh City—UEH, Vietnam.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Research data
No research data was used in this paper.