
Abstract
This article aims to adapt the chaotic trajectory generation algorithm, as originally presented by Cetina-Denis et al. in 2022 for quadcopters. This adaptation opens possibilities for various applications, including search and rescue operations and the handling of hazardous objects, within a three-dimensional exploration space. To accomplish this, hyperchaotic behavior is introduced into the linear displacement velocities along the three axes of motion by using the four-dimensional hyperchaotic Méndez–Arellano–Cruz–Martínez system. The article also delves into the potential applications of these aerial robots in patrolling designated spaces. It presents and analyzes both numerical and experimental findings, along with quantitative tests to assess the level of hyperchaos inherent in the generated trajectories. Furthermore, the article examines the scenario where two quadcopters simultaneously patrol the same workspace, exploring both numerical simulations and experimental outcomes.
Keywords
Introduction
Studies on food searching behavior of animal groups (especially ants) help in the solution of many problems, primarily optimization problems. Recently, biologists have discovered that ant activity is mostly of a chaotic nature. 1
Chaos theory is an interdisciplinary area of scientific study and a branch of mathematics. It focuses on understanding the underlying patterns and deterministic laws of dynamical systems that are highly sensitive to initial conditions. The study of chaos theory has applications in various fields, including physics, biology, economics, engineering, and even social sciences. It helps us understand complex systems that exhibit nonlinear behavior and provides insights into the irregular and unpredictable nature of many phenomena. Extensive research has been conducted on the development of chaotic trajectory patterns for mobile robots to replicate such unpredictable behaviors. For instance, existing research on introducing chaotic motion in differential drive robots often relies on Chaotic Random Number Generators (CRNGs) for motion selection,2–4 or directly manipulate the wheel-controlling pulse-width modulation signals. 5 However, the experimental data presented in these studies lacks sufficient detail to enable robust comparison and evaluation of different approaches.
Efforts have been made to create algorithms for generating chaotic trajectories in mobile robots that allow an easier implementation on physical robots. 6 These algorithms involve introducing chaotic system states into the linear and angular wheel velocities of differential drive mobile robots, allowing easy implementation on real robots. Some researchers have explored the generation of chaotic behaviors in mobile robots as they traverse predefined paths for surveillance purposes.7,8 Research on embedding chaotic properties into quadcopters has explored a wide range of objectives, predominantly through simulations. Some studies focus on introducing chaotic perturbations around a predefined trajectory, 8 while others utilize chaotic attractors as the trajectory itself.9,10 Experimental studies involving quadcopters, however, have primarily focused on testing various control metrics for trajectory or waypoint tracking,11–13 often without incorporating chaotic motion. While some experimental results have been presented for control in turbulent flight conditions, 14 the broader field of embedding chaotic dynamics into quadcopter behavior remains largely unexplored in real-world settings.
In other studies, the utilization of the Arnold cat map to generate a sequence of chaotic waypoints for UAVs is discussed in Curiac and Volosencu. 15 Additional investigations 16 tackle the challenge of surveillance within a confined area is addressed by using a four-engine unmanned aerial vehicle, leveraging chaotic systems to design an unpredictable velocity profile for the quadrotor. Furthermore, the emergence of chaotic behaviors in groups of mobile robots is considered, by adapting a control law to work in a self-organized robotic swarm using distance and bearing as coupling information. 17
Motivation
A key attribute of chaotic systems lies in their inherent unpredictability. Harnessing this characteristic for a mobile robot’s trajectory can offer numerous advantages and potential applications. Some of these applications include border surveillance, the detection of hazardous objects (such as explosives), search and rescue operations, and the exploration of uncharted territories, among others. For example, by employing trajectories that are inherently unpredictable, it would become virtually impossible for a hypothetical intruder to access a valuable item located within a specified area being patrolled by a quadcopter, without triggering threat-response measures.
As mentioned in the previous section, the lack of experimental results in the literature on this subject promotes a significant gap between theory and application. Therefore, the main contribution of this paper is the implementation of unpredictable and efficient trajectories in aerial mobile robots (particularly quadcopters) in a simple and cost-effective manner for its application in patrolling or search and rescue tasks by a real quadcopter.
The remainder of the paper is structured as follows: In the third section, we introduce the state model of the hyperchaotic Méndez–Arellano–Cruz–Martínez (MACM) system, 18 which is utilized here for the generation of unpredictable trajectories in mobile robots (quadcopters). In the fourth section, we delve into the mathematical model of a quadcopter, which is used for simulations. The fifth section outlines the algorithm for generating hyperchaotic trajectories for quadcopter, which is inspired by the one presented in Cetina-Denis et al. 6 that was applied to mobile robots, that is, it is a suitable extension to quadcopters. The findings of our numerical results are detailed in the sixth section, and the seventh section provides an account of the experimental outcomes. The eighth section presents experimental results for two quadcopters flying simultaneously in the same workspace. Finally, the last section presents our conclusions and potential avenues for future research.
Hyperchaotic MACM system
Chaotic systems are a category of dynamical systems in mathematics and physics. These systems are characterized by their sensitivity to initial conditions, which means that slight changes in the starting conditions can lead to vastly different outcomes. These systems are deterministic, leading to complex and unpredictable behavior. They are characterized by nonlinear dynamics and often exhibit strange attractors and fractal patterns. Understanding chaotic systems is essential in various fields, from physics and mathematics to engineering and even the study of chaotic phenomena in nature. Hyperchaotic systems typically manifest in higher-dimensional spaces, often involving three or more variables, and demonstrate increased complexity with more than one positive Lyapunov exponent. Therefore, its unpredictability increases.
The four-dimensional hyperchaotic system
18
emerges by extending the three-dimensional (3D) MACM chaotic system.
19
This system incorporates two essential parameters, features only two nonlinearities, offers flexibility and robustness, exhibits a single unstable equilibrium at a saddle point, and is characterized by cost-effective electronic implementation for both continuous and discretized versions. This system is described by the following equations:
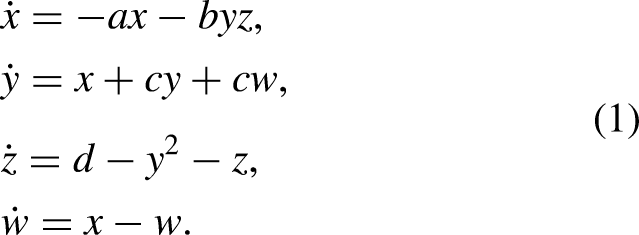
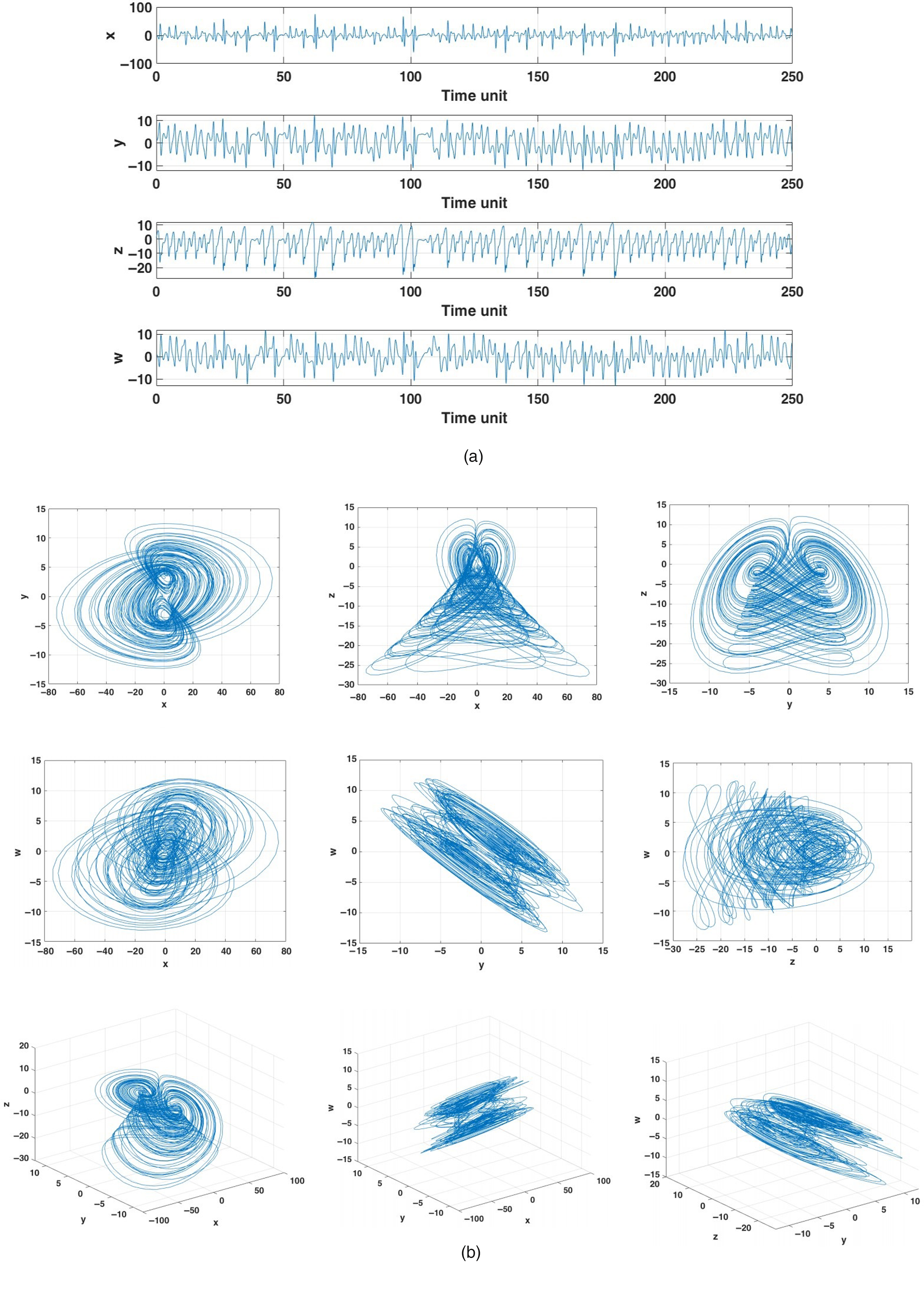
Hyperchaotic Méndez–Arellano–Cruz–Martínez (MACM) time evolution of states x, y, z, and w (a), and their hyperchaotic attractors (b).
Quadcopters
Unmanned aerial vehicles (UAVs), commonly referred to as drones, are advanced pieces of technology that rely on propellers or rotors to achieve lift and propulsion in the air. These drones maintain their stability by having half of their propellers spin in one direction while the other half rotate in the opposite direction. Each of these propellers is driven by a compact electronically powered motor.
Drones are operated via remote control and can execute various maneuvers. They have the ability to rotate both to the right and to the left around their vertical axis and longitudinal axis, which are referred to as Yaw and Roll, respectively. Additionally, they can ascend vertically, adjust their thrust, and tilt forward or backward relative to their transverse axis, known as Pitch (Figure 2). The control of these movements is achieved by modifying the propulsion of each propeller, a task managed by a device known as the central flight controller. The primary role of this controller is to ensure the drone maintains the highest level of stability during flight. Presently, UAVs serve a multitude of purposes, encompassing commercial, military, and recreational applications. These versatile devices can be employed for various tasks, including search and rescue missions, surveillance, traffic management, climatological data collection, and observations, firefighting, and the transportation of goods. The full quadcopter dynamic model, with x, y, and z planes position and (“Roll,” “Pitch,” “Yaw”) orientation angles, is described by Bouabdallah et al.20,21:


Axes of movement of a quadcopter.
The first three components represent the quadcopter’s orientation


Quadcopter with respect to the inertial frame.
The inputs of the quadcopter model (equation (2)) are denoted by

Hyperchaotic 3D trajectory algorithm for quadcopters
The objective of this paper is to generate hyperchaotic trajectories into quadcopters, that is, to make them fly across a bounded workspace in an unpredictable manner. This approach is intended to endow the quadcopters with hyperchaotic attributes, making them well-suited for efficient patrolling applications. To generate the hyperchaotic trajectories to the quadcopter (equation (2)), we propose an appropriate extension of the algorithm reported in Cetina-Denis et al. 6 for differential robots. First, instead of applying the values from the chaotic system’s state to linear and angular velocities, we use them as displacement velocities along the three axes (x, y, z). Subsequently, we use the hyperchaotic MACM system (equation (1)) because it offers four states. The fourth state would be assigned to manipulate the yaw rate, although in this case, we maintain the yaw as zero to streamline the implementation process.
It is important to highlight that the proposed Algorithm 1 is one of the contributions of this article in the following directions:
The algorithm makes possible the extension of two-dimensional (2D)-plane trajectories for mobile robots to trajectories in 3D-space for quadcopters. The algorithm substantially increases the non-predictability of the trajectories. Therefore, the potential applications are expanded.

Figure 4 shows the block diagram of Algorithm 1 to be used in this work. In step 1, the initial positions (
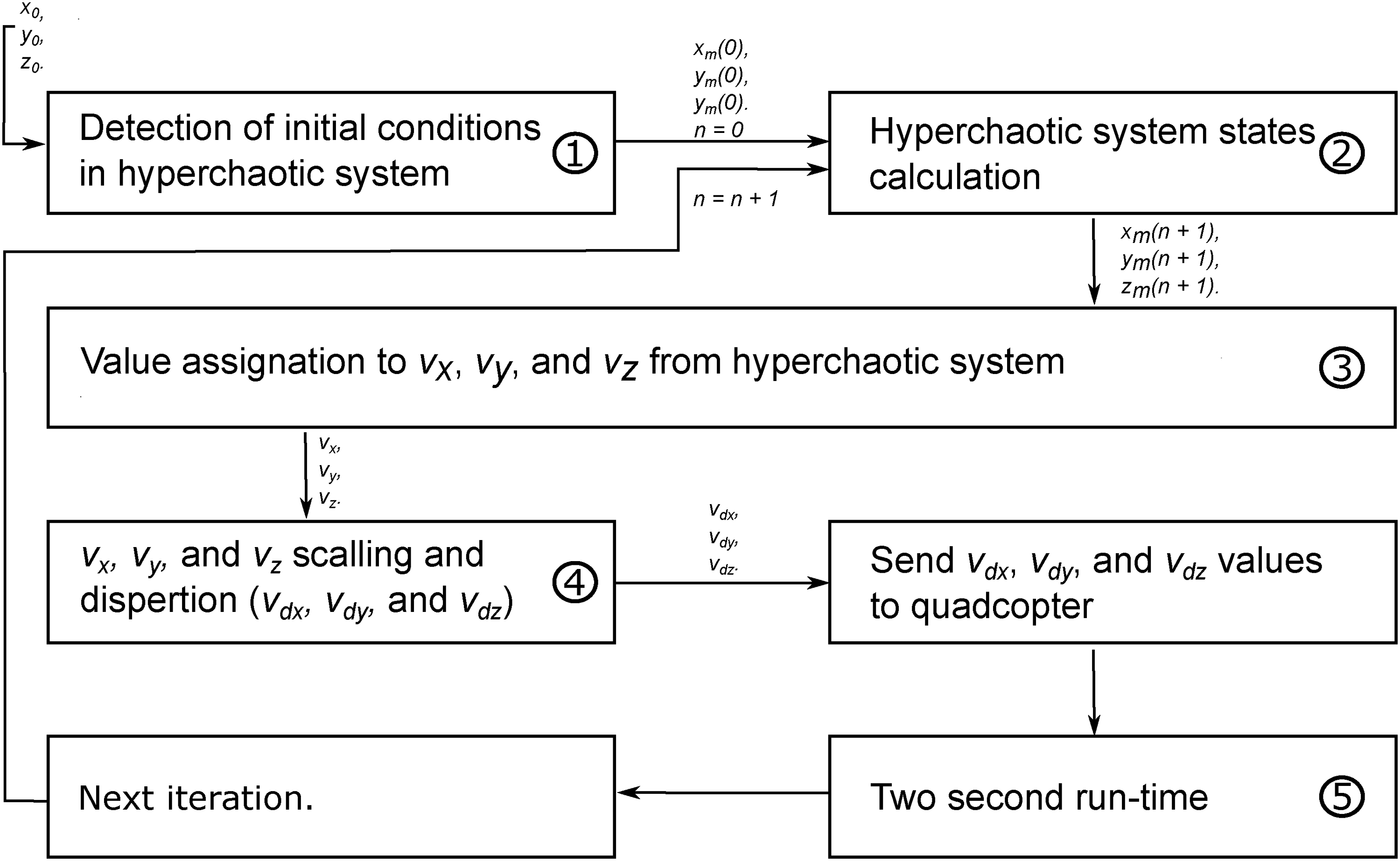
Block diagram of Algorithm 1.
To maintain the quadcopter within the designated workspace, a similar approach as presented in Cetina-Denis et al. 6 is implemented. In this approach, when the quadcopter approaches any of the predefined boundaries (Figure 5), it undergoes a “bounce-back” maneuver by reversing its current velocity along the same axis as the boundary it nears.

Reflective boundary avoidance strategy.
To keep persistent to the limits presented by a real quadcopter (as presented in a later section), we have constrained the velocities to a range of
Simulation results
In this section, we present the trajectories obtained from two different types of simulations by applying Algorithm 1 discussed in the previous section. Additionally, we provide an analysis of indicators that can help determine the presence of hyperchaos in these trajectories. The generated trajectories will be confined within a virtual workspace, which is represented as a 1-cubic-meter (1 m
Ideal quadcopter simulation
Since we only need to provide the desired velocities along the x, y, and z axes for the quadcopter, we conducted a simulation where the drone’s spatial motion is solely determined by these velocities. We refer to this as an ideal drone simulation, as it disregards the numerous factors typically affecting quadcopters, such as propeller forces and gravitational influence. This initial approach was taken to assess the emergence of chaotic traits in trajectories with these specific characteristics. In Figure 6, we show the result of such simulation, where we set the initial conditions for the quadcopter as
Generated hyperchaotic trajectory in the ideal quadcopter simulation.
Graphic simulation
To get a better overview of the behavior generated by Algorithm 1 in a more accurate manner, we first applied it to a more realistic model before implementing it on real quadcopters. Webots is a professional mobile robot simulation software package. It provides a versatile environment for rapid prototyping, enabling users to create 3D virtual worlds with realistic physics properties such as mass, joints, and friction coefficients. It allows users to equip these robots with a wide array of sensor and actuator devices, such as distance sensors, drive wheels, cameras, motors, touch sensors, emitters, receivers, and more. Webots supports controllers written in C/C++, Java, Python, or Matlab. It offers a diverse selection of robot models, such as the Crazyflie, often accompanied by default controllers that emulate the real-world robot’s behavior and accessories. This results in simulations that closely replicate the performance of their physical counterparts. For our research, we employed the unmodified Crazyflie model included in Webots, retaining its default parameters. The environment was kept simple, utilizing the basic scenario devoid of any obstacles. Figure 7 displays the generated trajectory by the simulated quadcopter in a 3D space, and its real-time position is obtained and plotted.

Graphic simulation on Webots platform.
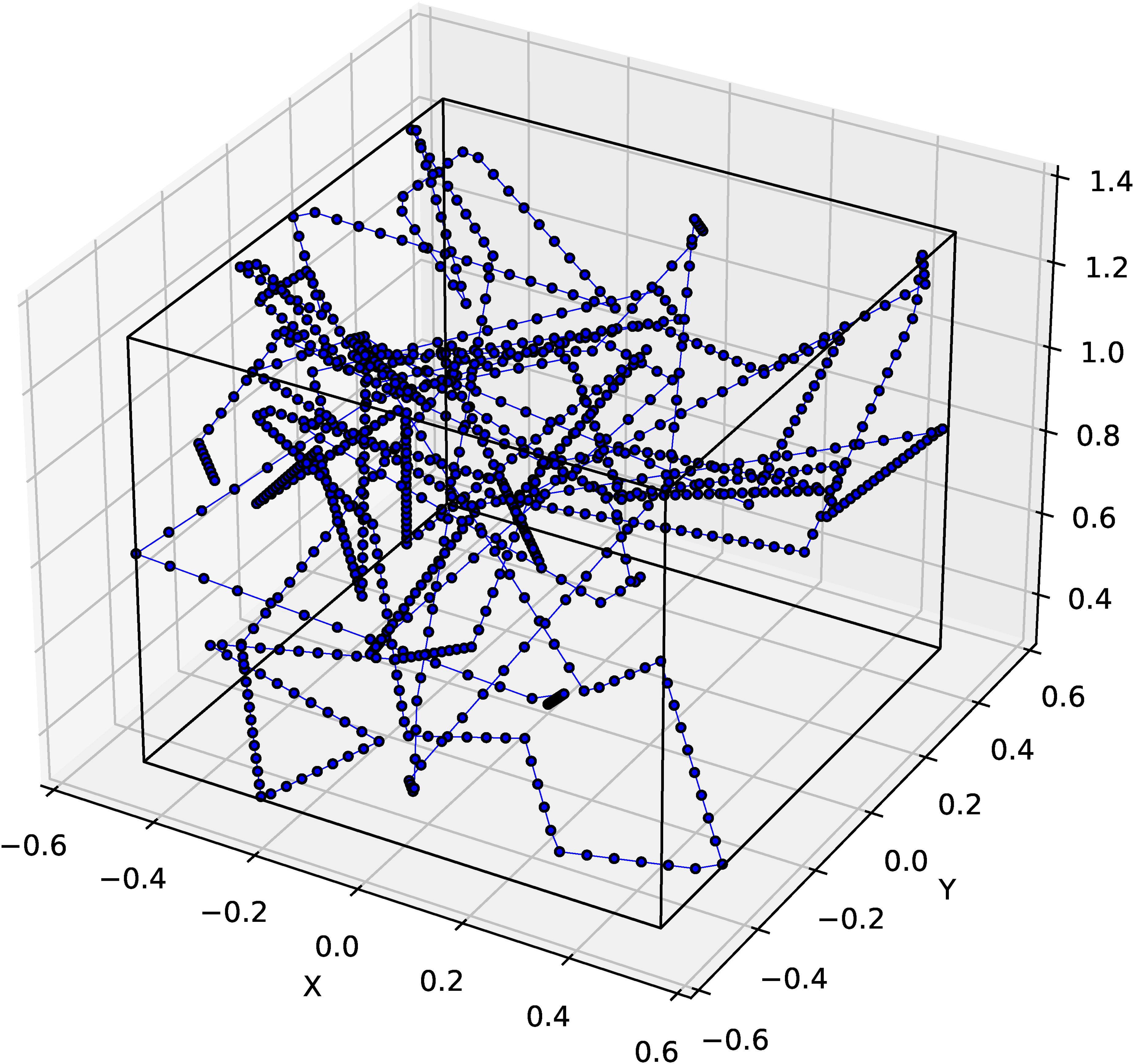
Figure 8 shows the generated trajectory by the quadcopter, starting from the initial conditions

Generated hyperchaotic trajectory in the graphic simulation.
Generated trajectories analysis
In this section, we conduct an exhaustive and complete analysis of the generated hyperchaotic trajectories in both types of simulations. We provide information on the coverage percentage and the outcomes of tests aimed at identifying the presence of hyperchaotic dynamics in these trajectories.
Quadcopter space coverage
To estimate the space coverage of the generated hyperchaotic trajectories by the trajectory generator algorithm (Algorithm 1) for the quadcopter, we divided the workspace into a
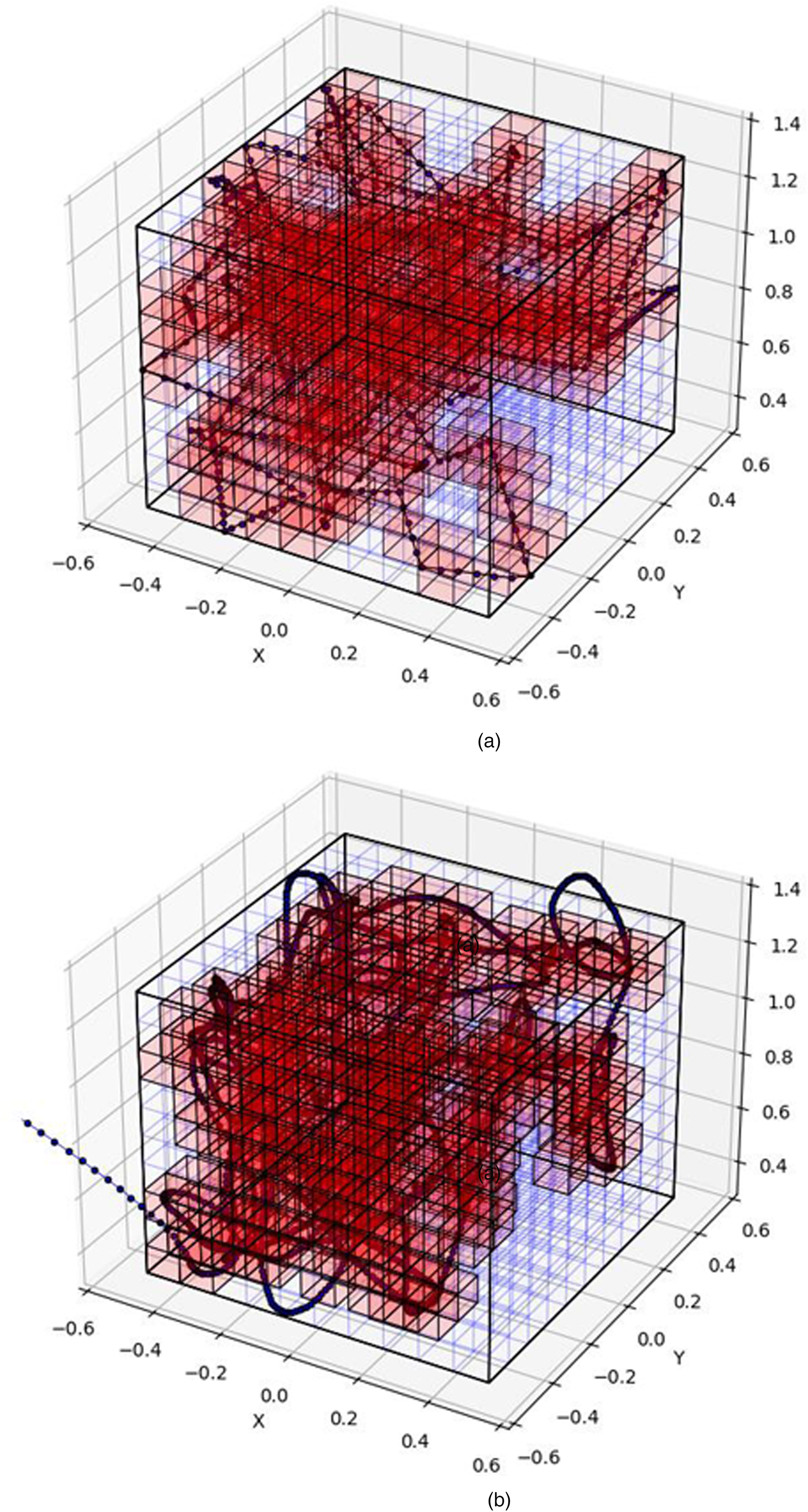
Space coverage by the ideal quadcopter trajectory (a), and by the Webots quadcopter trajectory (b).
The coverage for the first case is 43.30% and 46.09% for the second. Tables 1 and 2 show the results for 10 different initial conditions and their resulting space coverage. In all cases, the initial orientation of the quadcopter remains the same (
Space coverage for the ideal quadcopter simulation.

Space coverage for the graphical simulation.
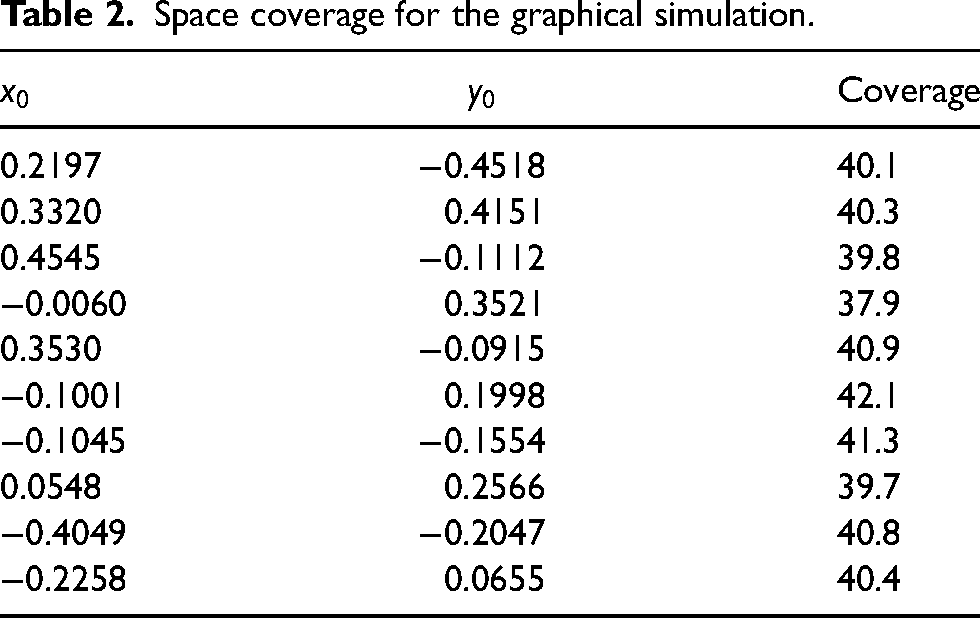
After conducting simulations with 1000 different initial conditions, the average coverage for the first case is 44.86%, while the second case yields an average coverage of 40.23%. In the Webots simulation, the lower coverage is attributed to the inherent limitations of graphical simulations and the use of a generic controller for the quadcopter (which is included in the platform). These factors contribute to the quadcopter occasionally getting beyond the predefined virtual workspace. We can see that the coverage is similar in the two cases. It is important to note that this space coverage percentage does not account for the possible range of onboard sensors or cameras, and their inclusion would significantly increase this percentage.
Presences of hyperchaos in the generated trajectories
To ascertain whether the generated trajectories display hyperchaotic behavior, we perform a series of tests aimed at identifying key hyperchaotic attributes. In this study, we examine various noteworthy features common to hyperchaotic systems, including:
Extreme sensitivity to initial conditions. Lower-dimensional attractors. The presence of fractal characteristics, such as a fractional dimension, self-similarity, and autocorrelation. Increase in unpredictable trajectories.
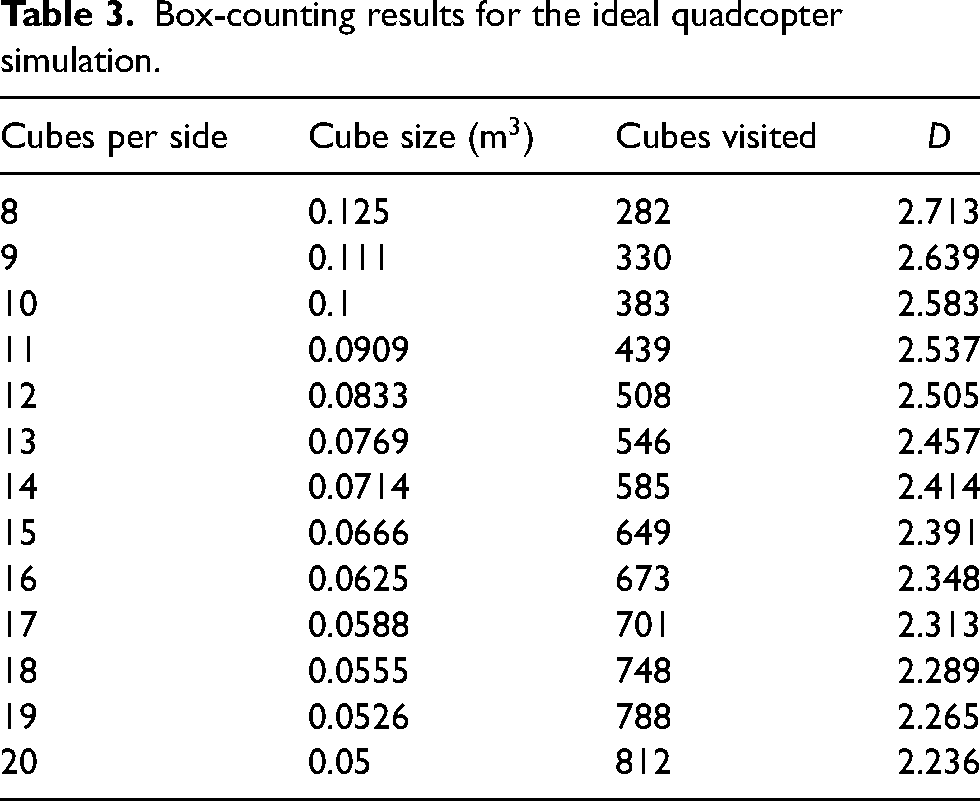
Box-counting
Fractional dimension is an appropriate indicator to describe the complexity of a certain geometry and box-counting analysis is proved to be an effective and appropriate method for fractional dimension estimation which is widely used.
22
In Cetina-Denis et al.,
6
this method is used to calculate the fractal dimension from the behavior of trajectories generated in a differential drive mobile robot. In 2D box-counting, a 2D fractal pattern is covered with a square grid to obtain the number of non-empty squares or boxes. The side length of each square in the grid is gradually increased and a series of values is obtained.
23
The linear regression used to estimate the fractional dimension of a 2D pattern
24
is given by

Box-counting results for the ideal quadcopter simulation.
Box-counting results for the graphical simulation.

The average fractal dimension (D) obtained for the ideal quadcopter simulation is
Correlation dimension
The correlation dimension, denoted here as
Correlation dimension results (
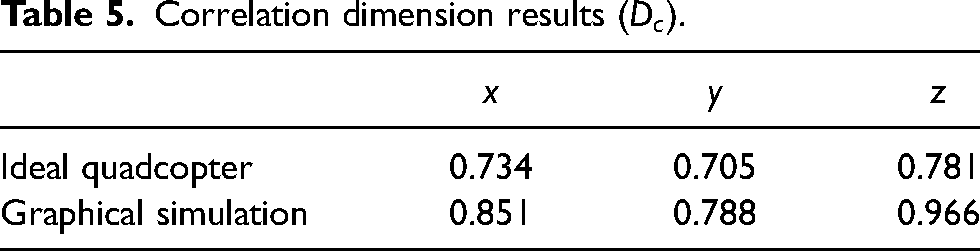
The correlation dimension is a measure of the effective dimensionality of the attractor underlying the time series. A value close to 1 suggests a lower-dimensional attractor, which is often associated with chaotic systems.
Hurst exponent
The Hurst exponent is a statistical measure employed to examine scaling properties within time series data. Scaling properties in time series pertain to patterns, such as those found in financial asset prices, which exhibit repetitions at various time scales.27,28 In simpler terms, the Hurst exponent is used as a measure of the long-term memory of a time series. Table 6 displays the average Hurst exponents (H) calculated for the time series data associated with the x, y, and z coordinates in 1000 distinct trajectories. All trajectories have been generated with arbitrary initial conditions for both the ideal quadcopter and the graphical simulation.
Hurst exponent results (H).

Values of
De-trended fluctuation analysis (DFA)
This is a statistical method used to quantify the presence of long-range correlations, or fractal-like patterns, in time series data.
30
It focuses on how the fluctuations in a time series change as a function of time scale. The slope of the log–log plot (the scaling exponent) is indicative of the degree of long-range correlations present in the data. In DFA, the value of alpha, often denoted as 
De-trended fluctuation analysis results (

Values of
Consensus
Individually, the characteristics measured within the generated trajectories are insufficient to independently confirm their hyperchaotic nature. However, when all four of these characteristics are integrated, they provide a compelling indication of the presence of hyperchaos within these trajectories.
Experimental results
In this section, we present the results obtained by applying Algorithm 1 to a real quadcopter (equation (2)).
Materials
The Crazyflie (Figure 10) is a small quadcopter, which serves as a versatile development platform primarily intended for educating individuals about robotics and quadcopters. This platform facilitates the acquisition of knowledge in various fields, such as control algorithms, integrated systems, aeronautics, and robotics, by offering firsthand experience with a real quadcopter. Furthermore, the hardware design and source code are open and accessible, encouraging users to explore and make modifications as desired.

Crazyflie quadcopter.
To measure the position of the Crazyflie, we used eight Flex 13 cameras along with Optitrack’s Motive software. This setup is a Motion Capture System (Mocap) that relies on infrared lights, enabling real-time position tracking of small reflective spheres fixed to the quadcopter with an elevated level of precision, up to tens of millimeters.
Methodology
We conducted an experiment where the Crazyflie was placed in coordinates
Generated trajectory in a Crazyflie.
We take 10 position measurements per second from the Mocap system. The quadcopter takes off to reach a height of
Quadcopter space coverage
In order to estimate the amount of workspace covered by the hyperchaotic trajectories imposed on the quadcopter, we use the same methodology presented in the previous section. In Figure 12, the obtained results by the trajectory presented in Figure 11 are shown.
Workspace covered by a Crazyflie.
For this trajectory (Figure 11) we get a workspace coverage of 41.3%, which is similar to the numerical results previously presented.
Presences of hyperchaos in the generated trajectories
In the following subsection, we conduct an exhaustive and complete analysis of this trajectory, applying the same methodology as previously described in previous sections to identify any chaotic attributes that may be present in the generated trajectory. Table 8 presents the results for the chaotic characteristics found in the generated trajectory by the Crazyflie.
Values obtained for the Crazyflie.

DFA: de-trended fluctuation analysis.
The results presented closely resemble those obtained in the simulations. The combination of these four characteristics provides a robust indication of the presence of chaos in the generated trajectories, even in a real-world scenario with actual quadcopters.
Experimental results for two quadcopters
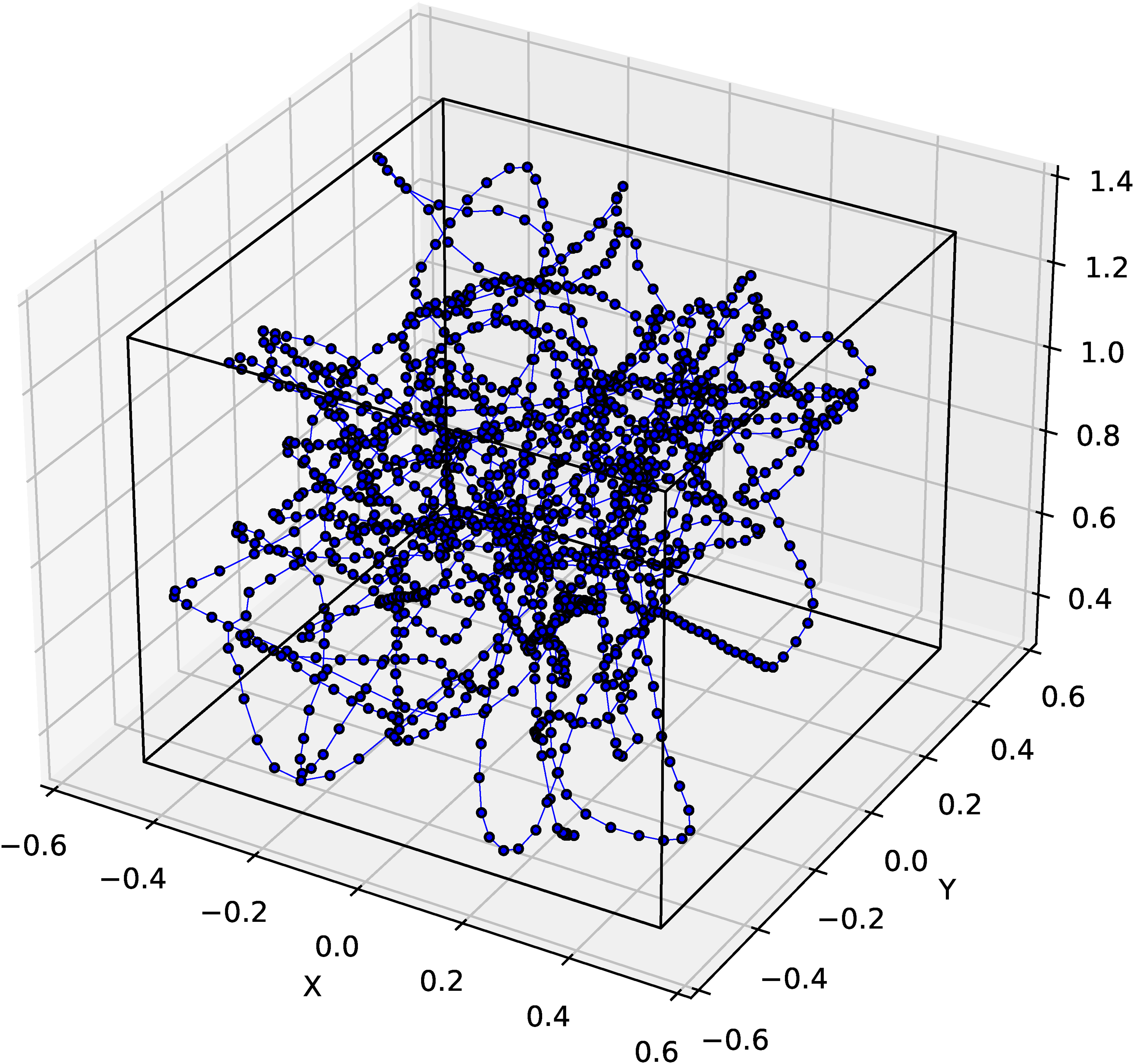
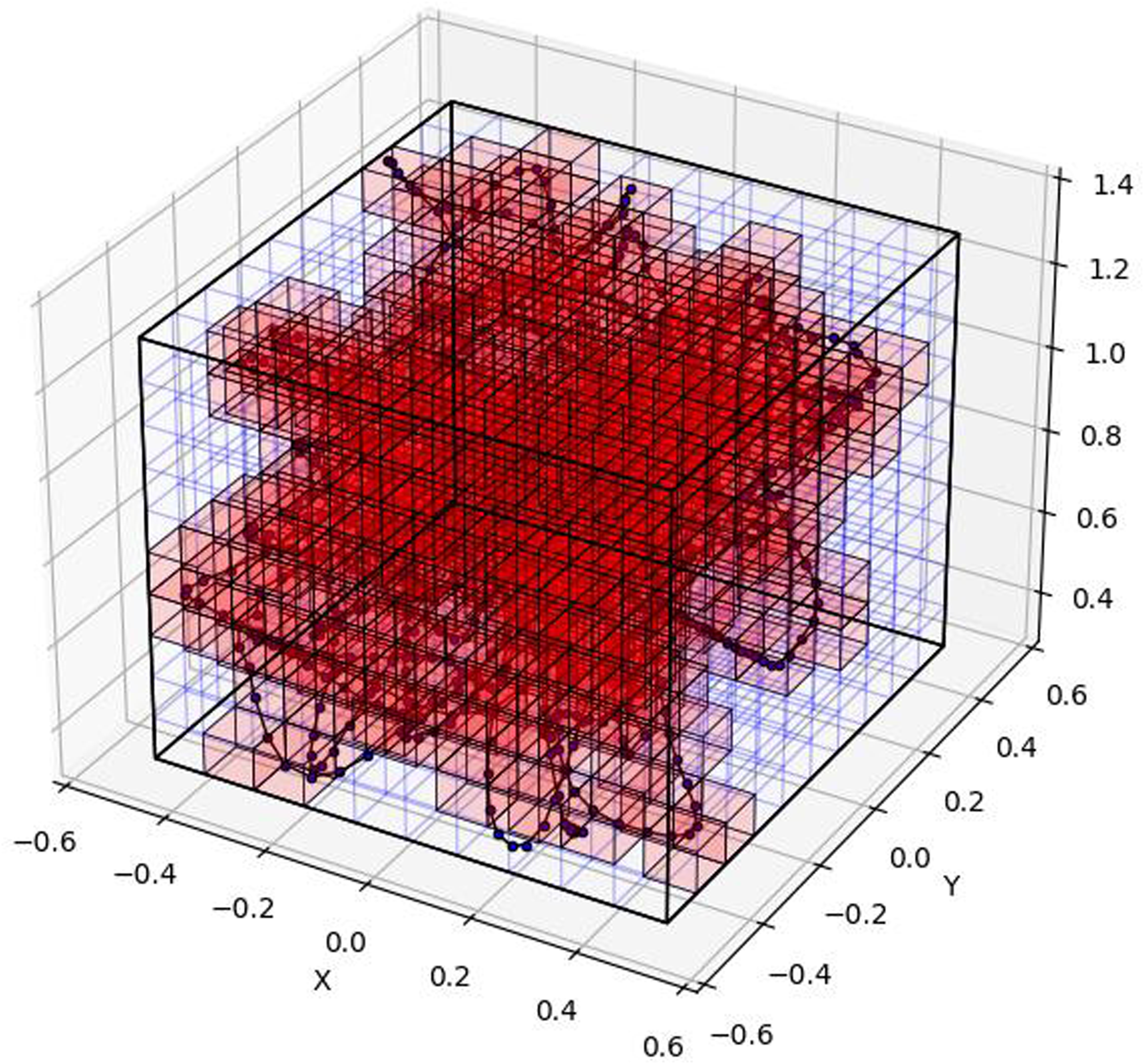
In this section, we present the results obtained by applying Algorithm 1 to a couple of real quadcopters at the same time in the same workspace. For this experiment, two Crazyflies are used simultaneously along with the Motion Capture System, and positioned at coordinates
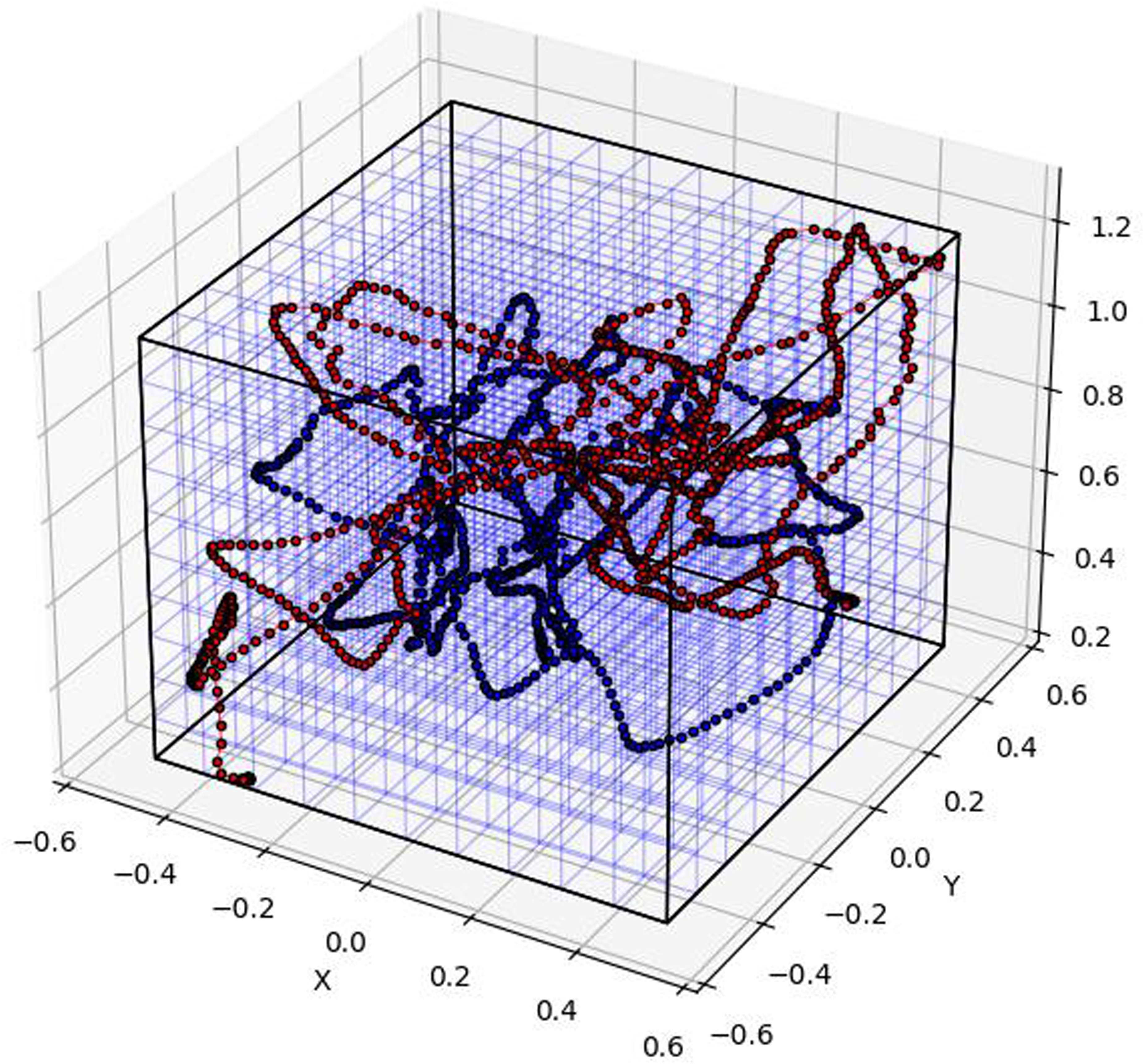
Workspace covered by two Crazyflies.
Quadcopter space coverage
To assess the amount of workspace covered by the generated chaotic trajectories by two quadcopters flying simultaneously, we apply the same methodology as described in the “Experimental results” section. In the case of this trajectory (Figure 13), we achieved a workspace coverage of 40.1%, which closely aligns with the results presented in previous sections in this study. Notably, it is worth mentioning that only half the number of iterations were required to achieve workspace coverage similar to that of a single quadcopter.
Presence of hyperchaos in the generated trajectories
In the following subsection, we perform an analysis of this trajectory, applying the same methodology as previously described to identify any chaotic attributes that may be present. Table 9 presents the results for the hyperchaotic characteristics discovered in the trajectory generated by the simultaneous operation of two Crazyflie quadcopters.
Values obtained for two Crazyflies.
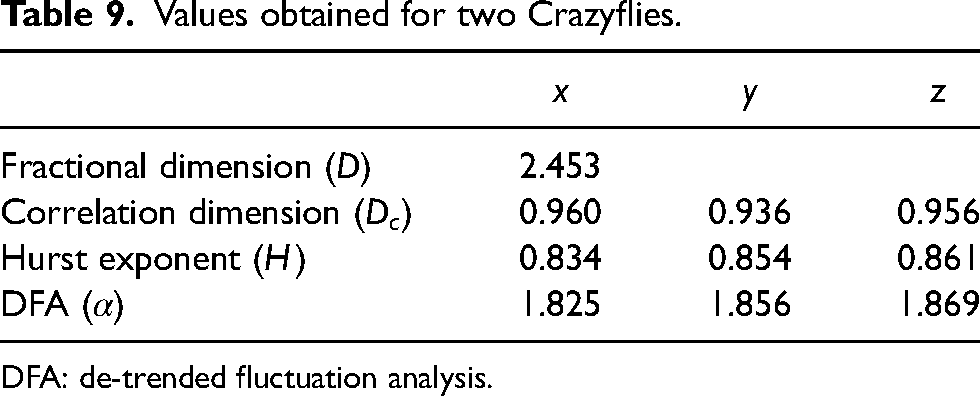
DFA: de-trended fluctuation analysis.
The presented results closely resemble those obtained in the simulations and the practical experiments conducted previously. The combination of these four characteristics offers a robust indication of the presence of chaos within the generated trajectories, even in a real-world scenario with operational quadcopters.
Discussion
The results presented in this study show that the proposed Algorithm 1 is capable of generating chaotic trajectories for quadcopters. The numerical indicators of chaos used to verify the presence of hyperchaos in the generated trajectories provide robust evidence of the hyperchaotic behavior of the quadcopter’s movements. Moreover, the results obtained in the simulations and practical experiments closely resemble each other, providing further evidence of the algorithm’s effectiveness.The results obtained in the experiments also show that the proposed algorithm can be used to generate hyperchaotic trajectories for two quadcopters simultaneously. The workspace coverage achieved by the two quadcopters was similar to that of a single quadcopter, but with half the number of iterations. This result is significant since it demonstrates that the proposed algorithm can be used to generate hyperchaotic trajectories for multiple quadcopters simultaneously, which can be used in various applications. It is worth mentioning that the proposed algorithm can be used to generate hyperchaotic trajectories for quadcopters of different sizes and with different payloads. The only requirement is that the quadcopter must be equipped with a motion capture system or specialized sensors to estimate its position and orientation. Furthermore, while the algorithm’s primary focus is on quadcopters, its adaptability allows for potential application in diverse robotic platforms, including wheeled robots, 6 legged robots, and humanoids. Adapting the algorithm to suit the unique kinematics of each robot type would be necessary.
Conclusions
In this paper, we have implemented a suitable extension of the chaotic trajectory generation algorithm, 6 originally designed for a differential drive robot, on a quadcopter. We used the hyperchaotic MACM system 18 to provide the quadcopters with desired velocities within a 3D workspace. We computed various numerical indicators of chaos to establish the presence of hyperchaos in the generated trajectories for the quadcopter, and the combined results of these indicators confirm that these trajectories exhibit unpredictability (hyperchaotic behavior). Based on these results, the authors of this study believe that we have established a robust foundation from which to replicate the findings and apply them in various other research areas. These applications may include border patrol, the detection of dangerous objects (e.g., explosives), search and rescue missions, and exploration of unknown territories, among others. Furthermore, experimental results show that implementing the proposed algorithm with two real quadcopters not only imparts them with chaotic properties but also significantly reduces the flight time needed to cover the same workspace when compared to just one quadcopter. For future work, the improvement of the boundary evasion algorithm will be proposed. We will work on the verification of the presence of hyperchaotic behavior in the generated trajectories for the quadcopters using other indicators of chaos.
Footnotes
Author contributions
Cetina-Denis and Cruz-Hernández designed the research. Cetina-Denis performed the simulations and experiments. Cetina-Denis and Arellano-Delgado processed the data. Cetina-Denis drafted the manuscript. Cruz-Hernández, Arellano-Delgado, and Lopéz-Gutiérrez helped organize the manuscript. Cruz-Hernández and Lopéz-Gutiérrez revised and finalized the paper.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Ethical statement
This article does not contain any studies with human or animal participants.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Council of Humanities, Sciences and Technologies (CONAHCYT), Mexico, under research grant 166654 (A1-S-31628).