
Abstract
Safety plays a key role when implementing collaborative robots (cobots) in human-shared workspace scenarios. Nevertheless, the significance and understanding of safety-related aspects may significantly vary with different stakeholders’ perspectives. In particular, there is often a misconception that cobots are inherently safe with the result of significantly underestimating the need of adopting adequate safety measures and features for the deployment of collaborative robots in industrial and non-industrial frames. Accordingly, this article develops an in-depth analysis of the stakeholders and their stakes in human–robot collaboration in the manufacturing industry with particular attention to the safety aspects. The proposed approach consists of a field study, with an online questionnaire and structured interviews, directed at the main stakeholders. The field study results are presented and compared with insights from two recent explorative studies. Finally, careful analysis and discussion is provided. This research focuses on three topics: (i) the specific phases in the collaborative robot application cycle, (ii) the stakeholders that are involved in each phase, and (iii) the stakes that affect the stakeholders in general, and specifically the role of safety within these stakes. The findings show that awareness of safety issues is still jeopardized between stakeholders. In addition, key stakeholders still significantly underestimate safety-related issues when implementing cobots in new production lines. This implies the need for objective assessment tools that can systematically address and assess all safety-related aspects. This study provides industry practitioners with a broader view of how different stakeholders regard safety-related aspects in the cobot life cycle. This will enable more informed decision-making when implementing cobot solutions and potentially avoid unconsidered safety risks later on. This article also adds to the scant research on the role of each stakeholder in human–robot collaboration.
Introduction
The Industry 4.0 era has led to a trend of mass customization, where the final product is tailored to the requirements of individual customers. Industrial automation can maintain high efficiency and repeatability for mass production but suffers from a lack of flexibility to deal with certain constraints and uncertainties in workspaces. Humans can deal with such uncertainties and variability but are often limited by their physical capabilities in terms of strength and speed. A balance between automation and flexibility is thus required to combine the benefits of automation and human labor. Human–robot collaboration (HRC) is precisely a robotics discipline that aims to make robots and humans work together to perform production tasks together. 1 The aim of the collaboration is thus to combine the powers of robotic systems and human resources.
A main characteristic of collaborative robots (cobots) is their ability to guarantee safe human–robot interaction. Safety is mandatory in the design of the system for workplaces where humans work in conjunction with robots. Agreement to standards is a prerequisite to proving safety aspects, as regulated by the certification process under Machinery Directive. 1 Three categories are classified: (i) The Type-A standard expresses the terminology and methodology elements according to ISO 12100 2 and IEC 61508 3 ; (ii) the Type-B standard defines safety aspects according to ISO 13849-1, 4 IEC 62061, 3 Section B1, and the safeguarding of humans according to ISO 13850, 5 ISO 13851, 6 Section B2; and (iii) the Type-C standard specifies individual safety standards according to ISO 10218, 7 which at Part 1 contains the requirements for robot manufacturers and at Part 2 the requirements that are proposed for the integrators. The ISO 10218 7 standard expresses collaborative operation requirements, considering that the maximum static force is limited to 150 N and the dynamic power is 80 W at the end-effector flange. Further specific requirements are identified for collaborative robots in ISO/TS 15066:2016 8 and ISO/IEC/IEEE 15288:2015, 9 which specify the software systems and life cycle processes.
Manufacturing companies have started using cobots since the 1990s. A number of collaborative robots have been developed during the last years by several robot developers. One of the first renowned cobots is Baxter by Rethink Robotics, followed by some more recent cobots described in previous studies. 10 –15 Some examples are shown in Figure 1.

While cobots are still an emerging market, analysts expect strong future growth as outlined in previous studies. 16,17 The application of advanced automation, sensor technologies, and artificial intelligence is stimulating this growth. Collaborative robots are a huge opportunity for many different industries, especially in an Industry 4.0 environment. This opportunity is strengthened with the upcoming Industry 5.0. Industry 5.0 focuses on the collaboration between people and smart systems, as exemplified by cobots, and is characterized by a people-oriented perspective, as reported, for example, by Breque et al.’s study. 18 In this context, the importance of safety in the development of cobots increases to realize the full potential of both Industry 4.0 and Industry 5.0, as mentioned in Peruzzini et al.’s study. 19 Most cobots are interoperable and can be enabled on the Internet of Things. In addition, they promote information transfer and transparency through their ability to collect, analyze and model data. Another feature is that they can evolve through software updates and their programmability. 20 They represent what most companies in different sectors need: adaptive systems based on flexibility, configurability, and efficiency. In addition, they support the gradual change of the work environment by improving the ergonomics of the workspace and aligning productivity with the well-being of the human operator, as reported by McKinsey & Company. 1 For example, robots can help improve the health and safety of manufacturing operators by taking over boring, dirty, and dangerous work. Cobots can be programmed, configured, and controlled locally in the factory. In this way, companies that choose the cobot route retain ownership of their automated processes and the valuable knowledge needed to manage them. The result is greater operational agility, flexibility, and competitiveness.
The close interaction between robots and humans makes safety constraints one of the most significant aspects of robot design and operation. This aims not only at avoiding collision but also at investigating and minimizing the consequences of collisions that are caused by unforeseen movements of a robot. Even if some standards define new collaborative operation requirements for industrial robots (minimal speed, maximum dynamic power, or maximum static force), several aspects remain unaddressed. Safety is an issue of increasing significance mainly when collaborative robots continuously interact or collaborate with human users as reported, for example, by Gualtieri et al. 21 In human–robot collaborative scenarios, basic rules for industrial robots, as reported in ISO 13849-1:2015, 4 need to be updated or even fully rewritten. Indeed, HRC infers the need of revisiting the main safety issues, as they are no more just related to risks of impacts due to malfunctioning of the systems but more and more the safety issues are due to the strict interaction between robot and human operators, as reported in ISO/TS 15066:2016. 8 Four collaborative models are defined as follows: safety-rated monitored stop (SMS), speed and separation monitoring (SSM), hand guiding (HG), and power and force limiting (PFL). 22 –24
When the SMS feature is used, the robot’s motion ceases before an operator enters the collaborative workspace. The operator can interact with the robot to perform manual tasks. When the operator leaves the shared workspace, the robot resumes its operation, and the SMS may be deactivated. The SSM model allows humans to work alongside robots by ensuring safety using several sensors installed on the robot or in the environment. The robot executes its task at maximum speed if the operator is in the green zone, at decreased velocity when in the yellow area, and it stops when the worker accesses the red area. The zone definition is based on the collision risk analysis and the human–robot mutual distance. These zones are often monitored by scanners and/or vision systems. HG is a model of operation in which the operator can teach the autonomous system motion by moving the end-effector without an ad hoc graphical user interface (GUI). This complex collaborative configuration requires machines equipped with both safety-monitored stop, speed, and separation functionalities. The power and force limitation approach requires dedicated equipment and controls to manage collisions with humans. The limitations are related to the motor power and force exerted by the robot.
Researchers have been attempting to identify methodologies/procedures to quantify and/or predict the level of safety of a robot at the design stage. Some attempts have been made by studying the biomechanics of head injury, through experimental, mathematical or observational approaches for linking them to appropriate safety criteria such as the head injury criterion in automotive crash test scenarios. Several indices have been empirically formulated to link quantitative injuries with the safety levels of robots. Examples of these indexes in robotics are described in previous studies. 25 –27
Cage-free robots are often referred to as “inherently” or “intrinsically” safe, 28 and this is inspired by the safety regulations and in particular collaborative robot safety requirements such as ISO/TS 15066:2016. 8 Yet it is a misconception that cobots are always safe to work without caging, and it is the collaborative application that must adopt adequate safety measures and features. 29,30 Additionally, other physical, psychosocial, or organizational health risks might occur, implying that cobots do not per se ensure healthy working conditions. 31,32 At the same time, the safety requirements are by some considered to be too restrictive concerning the acceptable forces that a cobot can exert. 33 Due to the strict safety limits, the cobot can be slowed down, and productivity is then sacrificed for safety. 34,35 An explanation for this apparent contradiction is the lack of safety knowledge and awareness. 36 According to a 2018 survey that collected data from robot distributors worldwide, 79% of distributors do not believe that their customers understand cobot safety requirements. 37 The perceived benefits of cobots can, however, differ significantly among different stakeholders. 38 Accordingly, there is a strong need to investigate the significance and understanding of safety-related issues in the implementation of collaborative human–robot scenarios. Therefore, we propose an in-depth analysis of the stakeholders and their stakes in HRC in the manufacturing industry.
Few papers have addressed stakeholder perspectives in HRCs in general and safety as particularly mentioned by Wang et al. 39 This study adds to the small number of studies on the topic of stakeholder perspectives in collaborative robotics. From a theoretical perspective, insights from new empirical research are combined with the few existing studies. From a practical viewpoint, the life cycle of cobots is described from a stakeholder perspective, with special attention to safety perception. As a result, practitioners are sensitized to differences in stakeholder perspectives along the cobot life cycle which will help them take better-informed decisions and avoid problems later on.
The article is organized as follows: “The associated problem” section outlines the main aspects of the safety issues by referring to specific collaborative human–cobot scenarios; “Stakeholders and their stakes” section identifies the involved stakeholders and their stakes in the HRC by focusing mainly on the manufacturing industry; “The proposed field study and survey approach” section proposes a survey approach for a field study; “Results and discussion on survey and interviews” section reports and discusses the obtained results. The comparative insights from two other recent studies are described in “Comparative analysis on the survey results” section. The summary and conclusions are presented in the final section.
The associated problem
Safety is an important topic on the manufacturing shop floor, governed by (inter)national occupational safety and health bodies such as the Occupational Safety and Health Administration and standardization and regulatory bodies such as the International Organization for Standardization (ISO), the European Commission or local governments. Implementing collaborative robot solutions is a complex problem with, next to safety, different cobot deployment aspects. The latter was reviewed by Cohen et al. 40 and include, for example, the cobot business model and the human–cobot task assignment. Safety as a specific topic in collaborative robot research has received significant attention in the past years as illustrated, for example, by the review of 35 papers published between 2009 and 2018 by Matheson et al. 41
Collaborative industrial robots are designed to allow physical interaction between the operator and the cobot. Prevailing safety standards and directives allow them to minimize collisions and thus increase safety. 31,32,42 –44 The use of cobots can improve the working condition of workers by reducing the risk of dangerous work (e.g. avoiding tasks in highly contaminated areas) and by improving ergonomic conditions (e.g. the robot can take over the handling of heavy loads and reducing the risk for musculoskeletal issues). 44 Safety in cobots can be further enhanced by the application of advanced sensors, such as skin sensors, innovative grippers, and new technologies such as haptics. 40 Therefore, according to some authors, collaborative robots are intrinsically safer. 40
However, the close presence of a robot and the interaction between humans and cobots create an additional safety dimension and layer of concern. 45 This is, for instance, illustrated by the recent example of a chess robot grabbing and breaking the finger of a child. 46 According to the concerned chess federation, this was due to the child violating certain safety rules. 47 Instead of blaming the child, it became clear that the robot was designed only to identify and move chess pieces, not to respond to the appearance of a human hand in its playing area. 47 Other safety risks may be introduced when using a cobot for different applications, since safety issues must be readdressed each time the cobot and peripheral equipment are adapted/transferred to work in a different application. 48 Furthermore, even if a collaborative robot is intended as intrinsically safe, still there are situations in which a human can be trapped or he/she can be constrained in a narrow space due to the robot. Also, the tool or object handled by the robot can become dangerous due to its weight/shape/sharpness. Another exemplificative scenario can be when a robot sensor cannot identify the presence of holes in the floor below the sensor height. This can easily result in driving into the pit and then falling over. This can result in creating a hazard for the robot and the nearby users. A further scenario can be when a robot is driving through a virtual barrier with a sensor misfunctioning, this can lead to the presence of the robot in a no-go zone easily setting unexpected hazards. Some additional examples of scenarios with potential safety issues are also outlined in Figure 2.

Example of human–cobot scenarios with potential safety issues: (a) cobot impacts a human due to workspace constraints (human being trapped between a wall and the cobot); (b), (c), and (d) cobot carries a payload that indirectly breaches workspace constraints; space restriction, payload impact, tool impact, respectively.
Stakeholders and their stakes
Collaborative robots are widely used in a wide range of applications, with manufacturing companies being the most attracted to this innovation around the world, where automation has dramatically increased productivity while achieving tremendous growth and sustainability. The steady growth of cobots is illustrated in Figure 3. The proportion of collaborative robots in the total number of annual industrial robots is steadily increasing from 2.8% in 2017 to 8.2% in 2021. Some argue that this is a relatively low share as said by Saenz et al. 49 and by Vanderborght. 50 Still, this has led to cobots being hailed as one of the fastest-growing products, as independent research forecasts sales growth to jump sixfold by 2030. 51
To develop safe and efficient robotic solutions, there is an urgent need to elicit the main concerns and expectations of major stakeholders. We argue that the importance of stakeholder perspectives is rooted in socio-technical systems thinking. Cobots operate based on a combination of technological, human (or social), and organizational aspects. Therefore, they can be considered a socio-technical system. 52 Baxter and Sommerville 53 defend the need to improve communications between system stakeholders about these socio-technical system aspects.

Annual installation of robots worldwide (freely adapted from data available at International Federation of Robotics 51 ): (a) total number of robots in 1000 units and (b) percentage of cobots versus industrial robots.
They suggest “sensitization and awareness activities” to sensitize all stakeholders to the concerns of other stakeholders as said by Baxter and Sommerville. 53
The identification and involvement of stakeholders in the introduction of intelligent automation, in general, is understood as essential as reported by Crawford et al.
54
or in EUROCONTROL.
55
When identifying stakeholders, it is important to consider the whole system from a socio-technical perspective and not just from a technical perspective.
56
Dul et al. identified four main stakeholders’ groups that contribute to system design
57
: system actors (the product/service users); system experts (professionals such as engineers and system designers); system decision-makers (e.g. managers who decide about the requirements for the system design, the purchasing, the implementation, and the use of the system); system influencers (e.g. media, standardization organizations, regulators, and citizens who have a general public interest in work systems and product/service system design).
Specific to risk assessment and management, there are many stakeholders, each with different objectives. 58 The reliability and trustworthiness of the system are very important for the stakeholders, whereby safety plays a major role. 59
The importance of the role of stakeholders is also true for HRC. The stakeholders involved in HRC are strongly influenced by how traditional automation functions in terms of both safety and efficiency. 60,61 For small and medium-sized enterprises, it can be a challenge to comply with complex laws and regulations. An additional challenge lies in the fact that greater stakeholder participation will make future safety decision-making even more challenging than it already is.
The literature review resulted in the formulation of three different phases of the collaborative robot application cycle: the consideration phase, the implementation phase, and the maintenance and support phase. In addition, a description is given of the stakes or interests that play a role in the implementation of a cobot. Among these stakes, safety represents one of the most important ones, and it is explored in more detail in “The proposed field study and survey approach” section.
The perceived benefits and obstacles to adopting cobots have been explored by some empirical studies. 23 –25 The same applies to the drivers for the adoption of cobots 62 –64 and general deployment decision considerations. 33,57,58 Yet the identification and specific role of the stakeholders for HRC have only received scant attention to the best of our knowledge, such as in a Swedish explorative study. 36 The roles of the various stakeholders in the collaborative robot application cycle, regarding their general stakes and safety as a stake in particular, have not yet been mapped out.
The proposed field study and survey approach
Based on the insights in the previous sections, we propose a survey approach that aims at and addresses the following research questions What are the phases of the collaborative robot application cycle? Who are the stakeholders in the manufacturing industry at each phase? What are the stakes that affect the stakeholders in general? How is safety playing a role as a stake for the involved stakeholders?
To answer these research questions, we propose to use a mixed method approach, combining literature research with surveys and interviews with various stakeholders worldwide who have experience working with cobots. The empirical research consists of two parts.
Field research was conducted in 2021 targeting stakeholders in HRC. Here, two respondent groups were surveyed: (1) respondents from the manufacturing industry and (2) respondents in education and research. The data from the survey were analyzed by tools such as Excel and STATA. A dataset containing the quantitative data was used to apply inferential statistics to analyze the correlation between the stakes, and also a correlation and regression analysis between the stakes and stakeholders across the three phases of the implementation cycle was carried out. It is worth noting that the three phases are based on Saenz et al., 49 who used the generic life cycle model at ISO 15288:2015 9 to model the specific life cycle phases for collaborative robot applications. In this frame, putting the cobot in operation is part of the implementation phase, while utilization and full operation (or cobot applications) would be considered to be part of phase 3.
A descriptive analysis was performed to understand which stakeholders, and stakes are important and play a role in human–robot collaborative systems.
The second part of the empirical research consists of the analysis of interviews with two cobot manufacturers (KUKA and Universal Robots).
Finally, we complement our analysis by comparing some of our findings with insights based on two explorative studies.
The survey questionnaire for the field work treated the following topics: a general explanation of the survey and identification of the respondents; an introduction and identification of the respondent (industry sector, company/institution name); the cobot application identification, the type of collaborative operations (SMS, HG, SSM, PFL), and the industrial applications (assembly, palletizing/kitting, inspection/measurement); the stakeholder identification in the three different phases (consideration phase, implementation phase, manufacturing and support phase); the identification of stakes; how the cobot has affected the safety in the workspace; the role of collaborative robots in the future.
The full questionnaire is available at Brescia and Rhea. 65
Results and discussion on survey and interviews
Result of survey analysis: Descriptive statistics
A total of 66 survey responses were received. These respondents represent 21 different countries, of which almost half (48%) are from Italy. The distribution over the two respondent groups is as follows: 79% belong to education and research and 21% to manufacturing companies. Details of participants are reported in Table 1. The outcomes of each section of the questionnaire will be discussed per section topic.
Country and profile of survey respondents.

Collaborative operations and applications
The proportion in which the four collaborative robot operations (multiple options are possible) are used by the respondents showed PFL representing the largest share with 32.8%, followed by HG with 25%, then SMS with 22.4%, and SSM with 17.2%. Assembly is the most considered industrial application, and this should not surprise, since assembly is a task that a cobot can easily perform, helping the worker with the workload and improving the working conditions and the quality of the products. For both respondent groups combined, the list of applications is as follows: assembly (37.0%); machine tending (17.8%); palletizing/kitting (17.0%); inspection/measurement (16.3%); welding (4.4%); deburring/polishing (4.4%); other (4.4%).
Stakeholders in different collaborative robot phases
The respondents were asked to choose the stakeholders that have roles in the collaborative robot application in each of the three phases. An overview of the representation of the stakeholders per phase is provided in Figure 4. Two stakeholder groups figure in the top three in each phase of the application cycle: Manufacturing/Production and Product Development/Engineering/R&D.

Percentage of stakeholders involved per phase (all respondents).
In the consideration phase, Product Development/Engineering/R&D, General Management, and Manufacturing/ Production are chosen as stakeholders involved, with, respectively, 20.7%, 19.8%, and 19.4%. Subsequently, 16.1% of respondents think that Finance/Purchasing has a relevant role, followed by Supply Chain Management/Logistics (9.7%). Support Services (5.1%), Sales and Marketing (4.1%), and Procurement (3.7%) are less important in the consideration phase. General Management and Finance appear to have an important role in this phase, and this can be explained by the fact that the implementation of a robotic solution requires a company to make an investment decision. Besides identifying and deciding the technical specifications and the system integrator for the collaborative operation, the investment amount and return of investment (ROI) calculation of the implementation need to be established. The frequency is the same between both respondent groups, except that manufacturing respondents give more weight to the Finance/Purchasing department than the education and research respondents. Both groups have a different scope, so it can be assumed that the manufacturing respondents are more cost-conscious and consider the cost as one of the drivers in the consideration phase of the cobot purchase, whereas most of the cobot projects of the education and research respondents are funded by public research institutions like government and universities. This may explain the difference in the results between both groups.
In the implementation phase, there are two main actors: the Manufacturing/Production departments (33.2%) and the Product Development/Engineering/R&D (27.2%). The other stakeholders are less involved: Supply Chain Management/Logistics accounts for 11.4%, and the occurrence of the other stakeholders is less than 10%. Also, here there is no big difference between respondents in manufacturing and education and research. Except that Product Development/Engineering/R&D is the second most chosen in both groups, but for the manufacturing respondents, this represents 57,14%, while for the education and research respondents, the percentage is 70%.
In the maintenance and support phase, three stakeholder groups are most cited: Manufacturing/Production (28.6%), Product Development/Engineering/R&D (19.6%), and Support Services (18.5%). In this phase, Support Services enter the top three most cited stakeholders. The latter can be explained by the fact that in this phase supporting activities such as employee training are included, involving the Human Resources department, and system updates, involving the IT department. Almost all of the manufacturing respondents choose the Manufacturing/Production department as the stakeholder with the most important role in this specific phase. Within the group of education and research respondents, 60% of the sample think manufacturing/production has an important role, next to 45% each for product development/engineering/R&D and the support services department.
Stakes in collaborative robot utilization
A five-point Likert scale method was used to identify and analyze the stakes that are affected the most by collaborative robot utilization. We used a weighted scale to indicate the extent of how affected the respondents think the stakes are ranging from extremely affected (weight = 5) to very affected (4), affected (3), slightly affected (2), to not affected (1). The total number of respondents who chose a particular scale value was multiplied by that value as weight. By multiplying the frequencies of each with the weight, the impact is calculated. The resulting total scores were totaled and the respective relative weight of each stake as a percentage is visualized in Figure 5, and the distribution of the different stakeholders within the total scores per stake is illustrated in Figure 6.
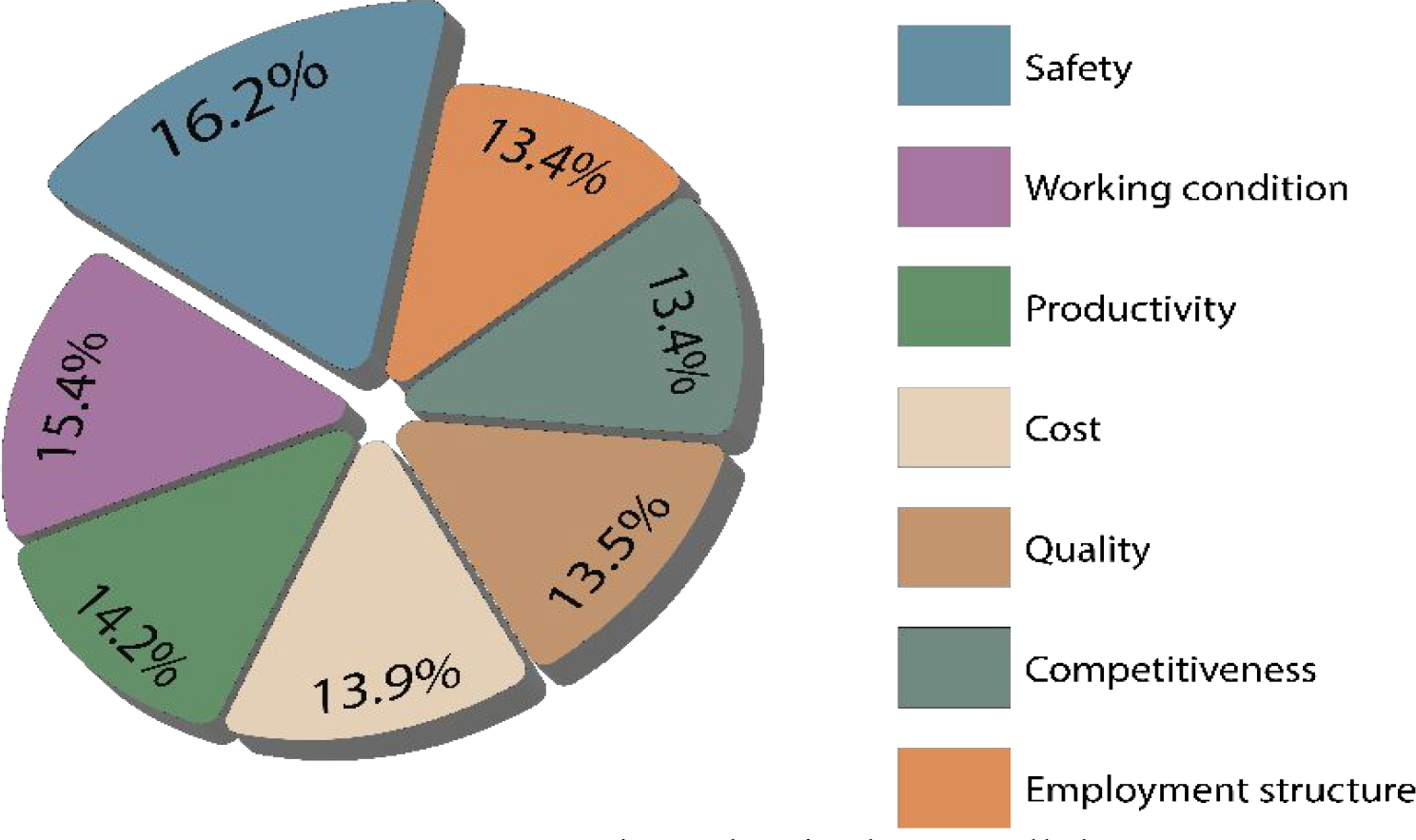
Impact on the stakes in the overall dataset.

Distribution of stakeholder as function of the identified features.
The most affected stake when deploying cobots is safety, followed by working conditions and productivity. The use of a collaborative robot can lighten the workload by taking over tiring and repetitive tasks and improve ergonomic aspects by doing heavy lifting instead of the employee. Thus, the working conditions are affected. There is no significant difference in impact when we look at the two respondent groups separately. For manufacturing, as well as for education and research, safety is most affected in collaborative robotics applications, followed by working conditions and productivity.
Viewpoints on stakes
We asked the respondents if they have experienced any specific advantages and disadvantages regarding the existing stakes that have been listed as an open question, and we classify each answer to each stake and counted the advantages and disadvantages based on the respondents’ opinions.
The different stakes are associated with both advantages and disadvantages. The stake for which the number of advantages outnumbers the disadvantages is safety. To quote a respondent: “A complete change of paradigm in the way operations are conceived introducing a high level of security.” The stakes cost and employment structure have more disadvantages compared to advantages according to the respondents surveyed. This can be explained by the investment needed to implement cobot technology and also the possibility of changes in the employment structure such as employee reduction. The fact that cost and employment structures are perceived as more disadvantageous is influenced by the underrepresentation of manufacturers in our total sample. From the point of view of the employment structure, a job loss can be seen as a disadvantage (e.g. by stakeholders such as trade unions), and from a cost-perspective, manufacturers could see this as an advantage.
We also asked the respondents to describe the specific advantages and disadvantages related to safety in the application of collaborative robots. The questions were asked as open questions. The answers were classified into different core topics. We can conclude that the respondents believe cobots can increase the level of safety. However, the company needs to take measures to design a workspace that ensures the employee’s safety. Applying extensive safety measures can slow down the collaborative application and thus impact productivity.
The topics representing advantages are safety, saving space, flexibility, user-friendliness, and ergonomics. The utilization of collaborative robots is believed to increase the safety level (40% of the respondents) and flexibility (24% of the respondents).
The topics representing disadvantages are the design of the workspace that must ensure employee safety, productivity/limited applications, working conditions, and workers’ knowledge. The highest concern (expressed by 54% of respondents) is the design of the workspace to ensure employees’ safety. This can be explained by the fact that there are no fences in the workspace between the cobot and the human. The working conditions are also a concern, expressed by 24%, because even though cobots improve the working conditions, at the same time they can add more risks to the human workers (e.g. stress-related risk). Additionally, the workers who have to use the cobots need to be trained. Disadvantages that are less considered but can be relevant during the consideration phase of the cobot introduction are the decrease in productivity (11%) and the lack of workers’ knowledge (7%). Interestingly, “No disadvantage” was mentioned by 22%.
The expressed advantages of cobots related to safety are a stimulus to utilize more collaborative robots in the future according to the respondents. The working condition, safety, and productivity stakes were mentioned as being positively impacted by cobots in the future. At the same time, productivity was also seen as a major challenge. This duality in the productivity stake can be explained by the potential of cobots to, on the one hand, produce 24/7 and increase quality and, on the other hand, slow down operations due to safety measures and decrease productivity. A majority (81%) answered that the working condition will improve with the cobots application because of the decrease in workload. More than 50% of the respondents saw safety as a stimulus for a cobot application. A similar percentage of respondents think that the productivity of the systems and the employee in doing daily tasks is another relevant aspect. Also, the quality of the products produced by utilizing cobots was mentioned by 40%, and the impact on the competitiveness of the company in the global market by almost 34%. In these aspects, the employment structure was not considered.
When asked about the challenges facing cobot deployment, the main challenge cited is productivity (17%), followed by employment structure and competitiveness, representing each 16% of respondents, and working conditions (15.5%) and safety (15%). Based on the answers of the respondents, we see that they have concerns regarding the speed of the cobots since cobots are not as fast as traditional industrial robots.
Finally, we sought to understand if the implementation of an HRC system would become more mainstream. This question was inspired by the fact that most manufacturing companies are still reluctant about the use of cobots as is illustrated by the relatively low percentage of cobots in the total amount of installed industrial robots. 66 The respondents believe that in the future, collaborative robots will be more common (70%) as a complement to the industrial robots that remain better suited for other applications.
Most of the respondents are optimistic about the utilization of cobots in many more manufacturing industries and industrial applications. The main drivers of cobots are their ability to increase/impact working conditions, safety, and productivity, while the concerns that the users still have are the lower speed of cobots compared to the traditional industrial robots and the possibility of employee reduction.
Results survey analysis: Inferential statistics
In this part of the data analysis, the aim was to find correlations not only among the stakes but also among the stakes and the stakeholders, and the level of impact that a stake has during the three different phases of the application of a collaborative robot. In this subsection, we describe the results of the correlation tables and linear regression.
From the inferential analysis, we see some correlation between the stakes. The correlation between all the stakes was established by making pairwise comparisons and using the “pwcorr” function in STATA to calculate p (the Pearson correlation coefficient). The result of this pairwise comparison is shown in the correlation matrix in Table 2. A correlation coefficient is a number between −1 and 1, a positive number signifies that there is a positive correlation between the stakes. The higher the positive correlation value, the more correlated the stakes are. This is indicated in Table 2 with a star rating for three levels of significance (*** for p < 0.01, ** for p < 0.05, * for p < 0.1). Because a correlation matrix is symmetrical, only half of the correlation coefficients are shown since the coefficients in the other half are redundant. The remaining entries in the matrix are indicated with the symbol S, which stands for symmetrical value. The highest three-star correlation coefficient is found between safety and quality (0.597). The next highest three-star correlation is between safety and quality (0.597) and between working conditions and safety (0.492). This means if cobot users think that quality is affected by a cobot application, they think that safety would be affected too. The same with working conditions and safety; if cobot users think that the working condition is affected, they are likely to think that safety would be affected too. This makes sense, because if the working condition would improve, then the employees would work better in doing their daily tasks, consequently, safety would improve too.
Our attempt to find a correlation between the stakes and the different types of industrial applications and different stakeholders in different phases did not produce a significant result since the correlation coefficient value was too low. The linear regression with safety as the dependent variable and the collaborative operations (SMS, HG, SSM, PFL) as the independent variables to see if there is any linearity between the safety level and the collaborative operations did not show any statistically satisfactory results (see Table 2).
Pairwise correlations among the stakes.

S: symmetrical value.
***p < 0.01.
**p < 0.05.
*p < 0.1.
Qualitative research: Interviews
Italian representatives of two main cobot manufacturers were interviewed to gather insights on all aspects of the various actors involved in collaborative robot applications. When needed to distinguish between both manufacturers, we identified them as A (producing both industrial robots and cobots) and B (only producing cobots). Due to limitations, such as the COVID-19 pandemic, we conducted interviews via digital platforms in February 2021. The interview consisted of nine questions, similar to the questions formulated for the survey. The results of the interview are summarized in what follows.
In line with the survey results, assembly is also seen as the industrial process usually using cobots. The role and importance of the integrator was accentuated in the manufacturer interviews.
The stakeholders affected by a cobot application are in line with the survey results. The robot manufacturers usually communicate the most about cobot deployment and their maintenance with the Manufacturing/Production and Product Development/Engineering. Interestingly, the cobot manufacturers do not usually communicate directly with General Management. According to A, usually, there is no direct communication with General management on detailed technicalities. System integrators need intensive communication with the external stakeholders to not only install software but also set up the cobots and make sure that the cobots run smoothly. According to A, system integrators also need to learn new skills such as programming, technology development, and integration. Manufacturer A mentions that the government is affecting or impacting the deployment of cobots. For example, Italy has a law that encourages companies to invest in Industry 4.0 and innovative technologies, and this encourages companies to buy collaborative robots.
The stakes affected by cobots are similar in the survey and interviews. The cobot manufacturers agree on the importance of safety as an affected stake and stress the importance of risk assessment and risk management to ensure the employee’s safety. This includes the safe design of the workspace, which is also one of the concerns of the survey respondents.
The cobot manufacturers are very outspoken about the advantages that cobots bring to the safety stake, although they also realize that safety requirements may slow down the cobot and impact productivity negatively. The cobot manufacturers show a very positive outlook for the future of cobots, and this should of course not surprise since they are commercializing cobots. This also explains why they do not consider cobots to be a replacement for industrial robots. A cobot is used to do easy, repetitive tasks that humans usually do, while a traditional industrial robot is a heavyweight robot that does heavy-duty tasks that are dangerous and sometimes impossible for humans to do. Cobot manufacturers are optimistic that collaborative robots will be adopted more in the manufacturing industry in the future. Due to their advantages, such as flexibility, user-friendliness, and adaptability to different industrial applications.
Comparative analysis on the survey results
Interviews with users and external stakeholders
Nine in-depth interviews were performed in the first quarter of 2022 in Belgium with a mix of different internal (cobot users) and external stakeholders (cobot manufacturers, integrators, and consulting companies). The focus was specifically on assessing how these stakeholders’ addressed safety. Compared to the results of the field study discussed in the “Results and discussion on survey and interviews” section, the following additional insights from these interviews are noteworthy.
The compactness of a cobot and its small footprint were mentioned as additional advantages. A surprising reason mentioned to install a cobot is that a cobot is considered (by two integrators and one user) to be “trendy.” The scientific literature describes this as a “signaling value.” 67 The investment in robotics can send an important signal to critical stakeholders (e.g. customers, investors, and employees). From this perspective, investments in cobots do not need to provide direct operational benefits. Indirect benefits like business development, capital raising, brand recognition, organic business growth, and employee satisfaction can be sufficient reasons to justify those investments. 67
Contrary to the field study discussed earlier, in this study, some stakeholders had a different view on the importance of safety. The interviewed cobot manufacturers view safety as a nonissue and think that “cobots are safe by concept.” Some users shared the same view, ignoring potential safety risks and making it easy to refer to the low power and speed of cobots. Some user quotes: – “I selected a cobot from manufacturer X because they have a model which allows operating at a speed higher than the allowed limit.” – “You should just buy a cobot and start to play and experiment with it and you will experience how to operate it. The design is safe, so nothing can go wrong.”
Integrators confirmed that this perception exists, be it more with small companies, and consider it an important risk. Indeed, most cobots have a safe conceptual design as self-contained machines with speed and power limitations and/or are equipped with safety sensors. However, as soon as certain tools are used, or as soon as the cobot is integrated into an operational process, dangerous situations can arise. An integrator formulated it as follows: “A cobot may be a safe machine, but as soon as you attach a knife to it, it could become a murder weapon.” Integrators stress that a cobot is sold as an “unfinished machine.” Several integrators and users strongly emphasized the fact that the tool plays an important role in the safety of the cobot application. An element of disagreement between the interviewees was the importance of pressure tests. Pressure tests are executed with a specific measurement tool with a membrane and a spring, and results are compared to the maximum allowable force and pressure on each body part as defined by ISO/TS 15066. 8 One integrator considers those as essential to verify whether a cobot is safe in the presence of humans but asserted that most other integrators do not perform those tests. Manufacturers, however, disagree with the need for application-specific pressure tests. According to them, the generic pressure tests done by the manufacturer are sufficient. An interviewed safety consultant does not want to rely on those because they are based on theoretical models. Some stakeholders, including manufacturers and integrators, consider the pressure tests less relevant once safety scanners are used to prevent collisions.
One company stressed the importance of training the operators, partly through a “train the trainer” concept. Without appropriate training, an employee is not allowed to use the cobot system. Training topics include not only basic user instructions but also advice on how remaining risks can be avoided, maintenance guidelines, and error fixing. According to one integrator, the lack of training is in many companies a big risk. He referred to the resulting risk by stating: “This is like giving the keys of a car to someone without a driver’s license.”
All interviewees confirm the relevance of the Machinery Directive. One element of discussion is who is responsible for the CE label. Delivering this CE label requires the execution of a safety analysis, which results in the integrator assuming legal liability for the analysis done. This analysis should also include psychosocial and ergonomic aspects. This is not mandatory, but one user specifically mentioned it because they think it is an important aspect of ensuring total safety. The approach from integrators regarding this is very diverse. Cobot users installing cobots without the help of an integrator are not always aware that a CE label for the cobot application is required, which might result in legal disputes when accidents happen. Another integrator stated that they purely focused on the Machinery Directive during the implementation process. In the end, as part of their job, they deliver a CE label to confirm that the machine is safe. The CE label that they deliver shows that the Cobot application is following all regulations, including those stated in the Machinery Directive. It is quite astonishing that the different key stakeholders in this industry tend to have different interpretations of what needs to be done to be compliant.
All interviewed companies are aware of the existence of technical specification ISO/TS 15066 8 and consider this as an important reference in the context of the safety of a cobot installation. Two companies noted, however, that the specifications are not clear enough, which is a challenge when a new player aims to be compliant.
Comparative insights with a related international study
An empirical Swedish study performed 29 in-depth interviews, covering three stakeholder groups: (i) professionals in different capacities within the industry (of one multinational), (ii) researchers in engineering science, and (iii) some key stakeholders from government organizations. 38 This study addresses perceived benefits, perceived technical and organizational challenges, and stakeholder views on related safety and regulatory issues. 38 The perceived benefits of intelligent automation such as HRC, broadly correspond with the conclusions of our field study discussed in the “Stakeholders and their stakes” section, improved ergonomics, increased product quality, and improved safety. The obstacles recognized are technical obstacles on the one hand. Cobots are not sufficiently developed for the need for speed, accuracy, and quality in production. Also, the integration of equipment such as cobots with other technology in factories can be challenging. 38 On the other hand, there can also be organizational obstacles relating to the distribution of roles and responsibilities between stakeholders within the organization, the task division between human operators and robots, operator training, and the measures taken to establish trust in the new technology. 38 In line with our safety literature research, regulations are also considered an obstacle. The reasons are expensive risk assessments and too restrictive safety systems that make automation too expensive and too slow.
Summary and conclusions
The implementation of a collaborative robot can be seen as a technological transformation, bringing about changes in manufacturing and engineering processes and activities and thus necessitating manufacturing and engineering change management. An essential condition for the successful implementation of these change activities is the identification of all relevant stakeholders to obtain all necessary assessments of the planned changes and to take the knowledge gained into account in the planning process. The missing or delayed involvement of relevant stakeholders can cause additional costs, unplanned effects, or even production delays as reported in Beane. 67 Safety risks that are not considered are examples of such unplanned effects. When safety guidelines and regulations are complicated, as in the case of cobots, 68,69 it is especially difficult for small and medium-sized enterprises to comply with them. In addition, increased stakeholder participation will make safety decisions even more challenging.
The analysis of the field study and the complementary insights discussed in the “Interviews with users and external stakeholders” and ” Comparative insights with a related international study” sections showed that there is not necessarily unanimity between internal and external stakeholders concerning taking safety measures. Being able to identify all relevant stakeholders in the different phases of the life cycle and realize that they do not always have the same opinion regarding bot safety is extremely important for making good decisions. Additional challenges are the lack of cobot safety knowledge, as reported by Hentout et al. 70 There is also a different perception of the importance of safety among stakeholders, as illustrated in the discussed field studies. A clear consequence is the underestimation of safety risks, resulting in applications that do not live up to safety requirements as mentioned also in previous studies. 71,72
The contribution of this article lies in describing the life cycle of cobots from a stakeholder perspective and paying special attention to the safety perception of the various stakeholders. The importance of identifying both internal and external stakeholders involved all safety risks when deploying cobots was exposed and illustrated through field studies. The fact that, to the best of our knowledge, very little comparable research exists further emphasizes the contribution of this work. Indeed, this article addresses the perspectives of the various stakeholders in dealing with safety issues related to human–robot collaborative scenarios. The article develops an in-depth analysis of the stakeholders and their stakes in HRC in the manufacturing industry by proposing a field study, including an online survey and several interviews with experts in the field. The results obtained are analyzed and compared with two other recent studies.
As a general conclusion, the assessment of the importance of cobot safety differed according to the phase of the collaborative robot application cycle and from one stakeholder group to another. While our survey clearly showed that safety is regarded as the most important stake in collaborative robots, comparative analysis with another study showed that sometimes stakeholders consider safety a nonissue for cobots. We believe this is very strongly linked to the general safety vision within a company and the available amount of safety awareness and knowledge.
There is also a conflicting appreciation of safety as a stake between cobot manufacturers (and some users) and integrators. And there is a different perspective on how safety needs to be insured (e.g. the importance of pressure tests) and how the Machine Directive and CE labeling need to be understood. An interesting new element that emerged in our comparative analysis is the “signaling value” as the driver for the installation of a cobot. An important conclusion of our field study is confirmed in the Swedish study: in the end, the most important barrier is an imbalance between the cost of the investments and the benefits. While stakeholders have very similar views on perceived benefits, when it comes to obstacles to intelligent automation, the industry experts are more articulate than the academics in their restraint. This last point indicates that there is a need for additional empirical research among cobot users in the industry.
Finally, based on our analysis, we conclude that the importance of safety differs greatly among stakeholders. This can often lead to significant underestimation of safety-related issues when implementing cobots in new production lines. This implies the utmost need to raise awareness of all the safety implications through an objective assessment tool that is foreseen as future work by the authors.
Footnotes
Acknowledgements
The authors wish to acknowledge Prof. Giovanni Mirabellli for promoting this cooperation between University of Calabria and KU Leuven. The second and third authors spent a period of study at KU Leuven supported by an Erasmus scholarship that is also gratefully acknowledged.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article has been partially funded by the PNRR Next Generation EU “Future Artificial Intelligence Research—FAIR”—CUP H23C22000860006.